
Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Hammerstein Adaptive Filtering under the Maximum Correntropy Criterion

2.1. Correntropy

2.2. Hammerstein Adaptive Filtering
| Algorithm 1: Hammerstein adaptive filtering Algorithm under MCC. |
| Parameters setting: μp, μw, σ Initialization: p(0), w(0) |
For n = 1, 2, … do
|
3. Convergence Analysis
3.1. Stability Analysis
3.2. Steady-State Mean Square Performance
- (A)
- The noise v(n) is zero-mean, independent, identically distributed, and is independent of the input X(n), and e(n).
- (B)
- The a priori errors ep(n) and ew(n) are zero-mean Gaussian, and independent of the noise v(n).
- (C)
- ||X(n)w(n)||2 and ||XT(n)p(n)||2 are asymptotically uncorrelated with f2(e(n)), that iswhere and are the covariance matrices, and denotes the trace operator.
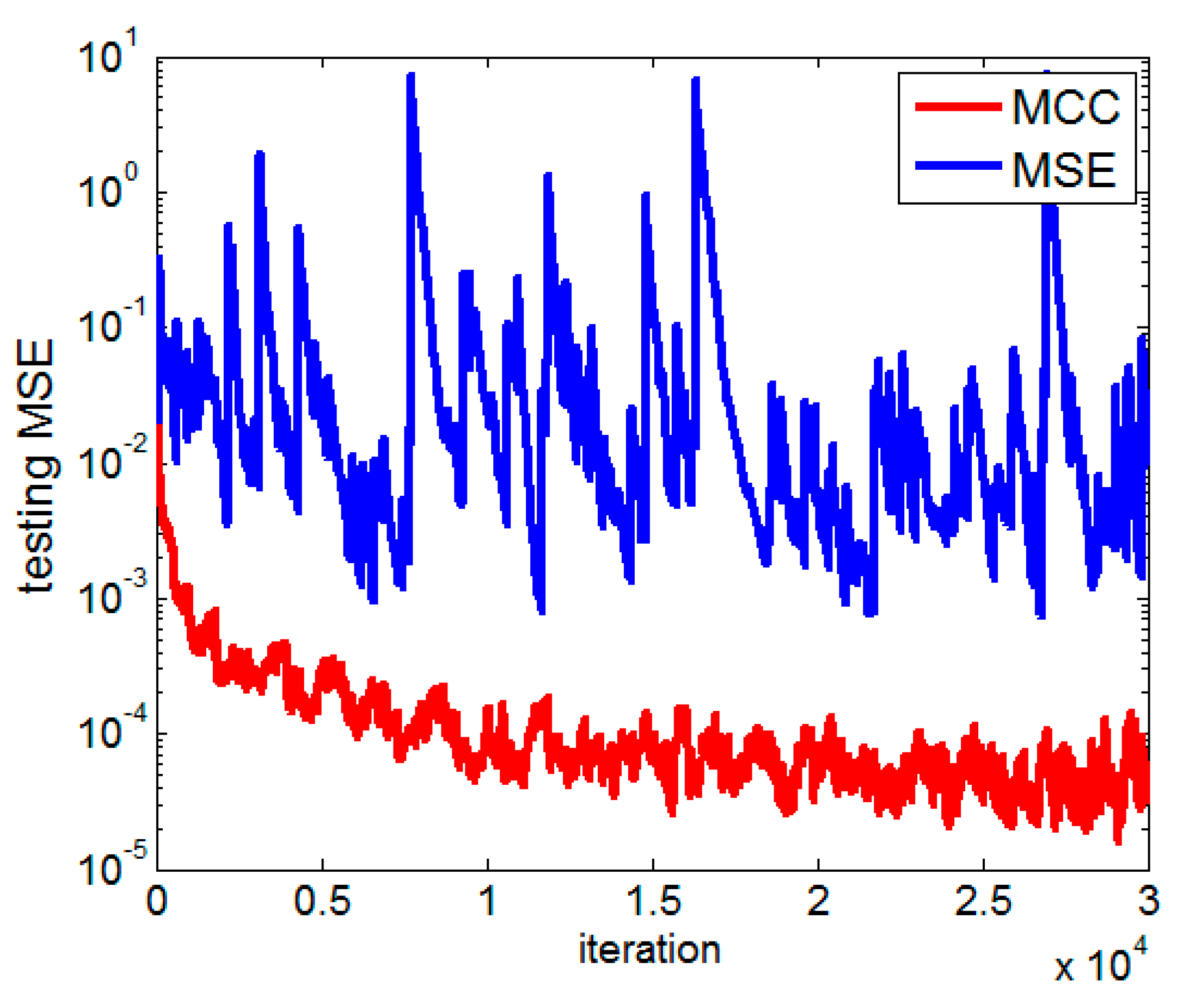
4. Simulation Results
4.1. Experiment 1




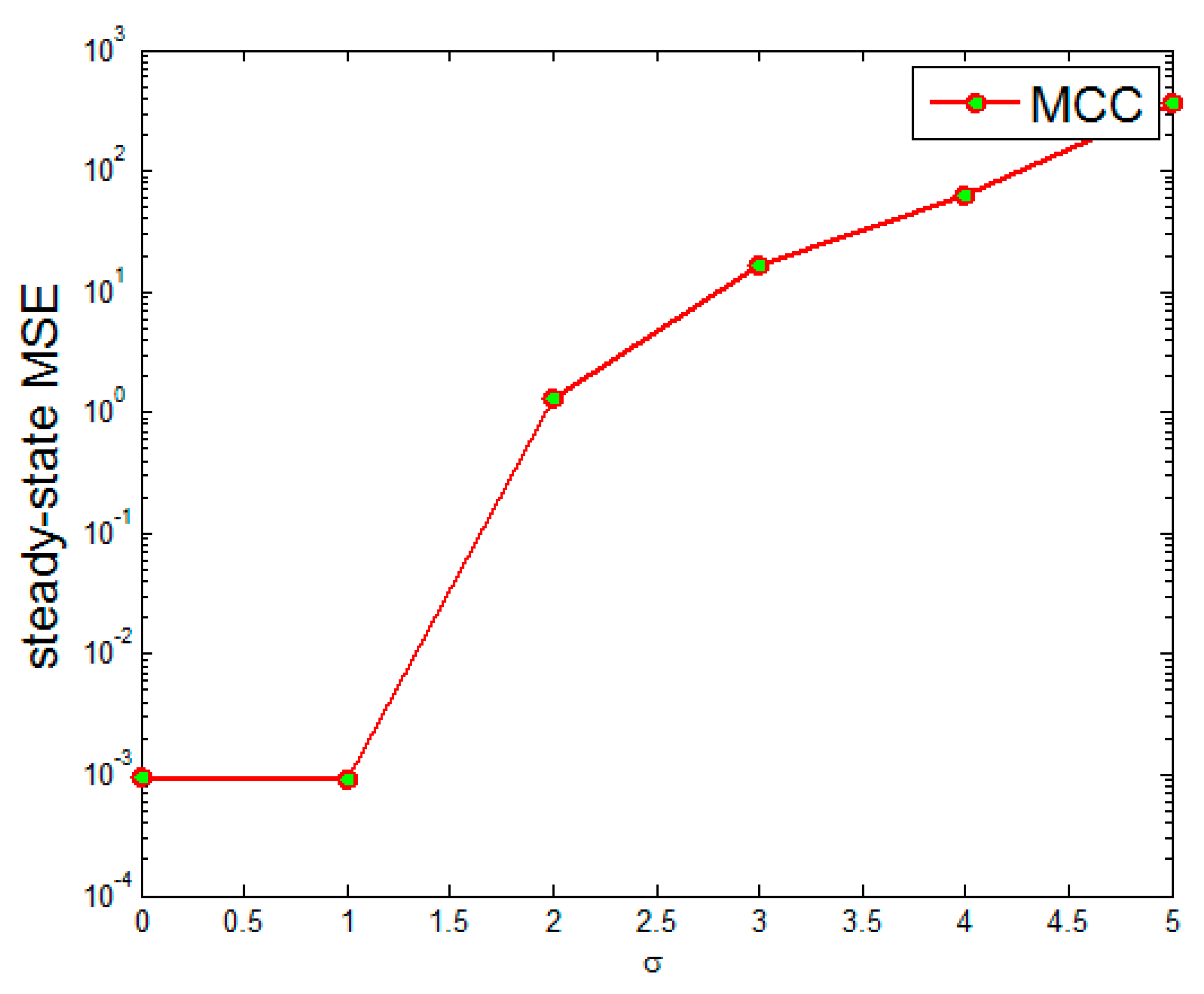
4.2. Experiment 2



5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ljung, L. System Identification—Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Sayed, A.H. Fundamentals of Adaptive Filtering; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Wiener, N. Nonlinear Problems in Random Theory; MIT Press: Cambridge, MA, USA, 1958. [Google Scholar]
- Scarpiniti, M.; Comminiello, D.; Parisi, R.; Uncini, A. Nonlinear spline adaptive filtering. Signal Process. 2013, 93, 772–783. [Google Scholar] [CrossRef]
- Bai, E.W. Frequency domain identification of Wiener models. Automatica 2003, 39, 1521–1530. [Google Scholar] [CrossRef]
- Ogunfunmi, T. Adaptive Nonlinear System Identification: The Volterra and Wiener Model Approaches; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Scarpiniti, M.; Comminiello, D.; Parisi, R.; Uncini, A. Hammerstein uniform cubic spline adaptive filters: Learning and convergence properties. Signal Process. 2014, 100, 112–123. [Google Scholar] [CrossRef]
- Ortiz Batista, E.L.; Seara, R. A new perspective on the convergence and stability of NLMS Hammerstein filters. In Proceedings of the IEEE 8th International Symposium on Image and Signal Processing and Analysis (ISPA), Trieste, Italy, 4–6 September 2013; pp. 343–348.
- Bai, E.W.; Li, D. Convergence of the iterative Hammerstein system identification algorithm. IEEE Trans. Autom. Control 2004, 49, 1929–1940. [Google Scholar] [CrossRef]
- Umoh, I.; Ogunfunmi, T. An Affine-Projection-Based Algorithm for Identification of Nonlinear Hammerstein Systems. Signal Process. 2010, 90, 2020–2030. [Google Scholar] [CrossRef]
- Umoh, I.; Ogunfunmi, T. An Adaptive Nonlinear Filter for System Identification. EURASIP J. Adv. Signal Process. 2009, 2009. [Google Scholar] [CrossRef]
- Umoh, I.; Ogunfunmi, T. An adaptive algorithm for Hammerstein filter system identification. In Proceedings of the EURASIP European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008; pp. 1–5.
- Greblicki, W. Continuous time Hammerstein system identification. IEEE Trans. Autom. Control 2000, 45, 1232–1236. [Google Scholar] [CrossRef]
- Jeraj, J.; Mathews, V.J. Stochastic mean-square performance analysis of an adaptive Hammerstein filter. IEEE Trans. Signal Process. 2006, 54, 2168–2177. [Google Scholar] [CrossRef]
- Voros, J. Iterative algorithm for parameter identification of Hammerstein systems with two-segment nonlinearities. IEEE Trans. Autom. Control 1999, 44, 2145–2149. [Google Scholar] [CrossRef]
- Greblicki, W. Stochastic approximation in nonparametric identification of Hammerstein systems. IEEE Trans. Autom. Control 2002, 47, 1800–1810. [Google Scholar] [CrossRef]
- Ding, F.; Liu, X.P.; Liu, G. Identification methods for Hammerstein nonlinear systems. Dig. Signal Process. 2011, 21, 215–238. [Google Scholar] [CrossRef]
- Jeraj, J.; Matthews, V.J. A stable adaptive Hammerstein filter employing partial orthogonalization of the input signals. IEEE Trans. Signal Process. 2006, 54, 1412–1420. [Google Scholar] [CrossRef]
- Nordsjo, A.E.; Zetterberg, L.H. Identification of certain time-varying nonlinear Wiener and Hammerstein systems. IEEE Trans. Signal Process. 2001, 49, 577–592. [Google Scholar] [CrossRef]
- Atiya, A.; Parlos, A. Nonlinear system identification using spatiotemporal neural networks. In Proceedings of the International Joint Conference on Neural Networks, Baltimore, MD, USA, 7–11 June 1992; pp. 504–509.
- Volterra, V. Theory of Functionals and of Integral and Integro-Differential Equations; Courier Corporation: North Chelmsford, MA, USA, 2005. [Google Scholar]
- Principe, J.C.; Liu, W.; Haykin, S. Kernel Adaptive Filtering: A Comprehensive Introduction; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Chen, B.; Zhao, S.; Zhu, P.; Principe, J.C. Quantized kernel least mean square algorithm. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Zhao, S.; Zhu, P.; Principe, J.C. Quantized kernel recursive least squares algorithm. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1484–1491. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Zhao, S.; Zhu, P.; Principe, J.C. Mean square convergence analysis of the kernel least mean square algorithm. Signal Process. 2012, 92, 2624–2632. [Google Scholar] [CrossRef]
- Bai, E.W. A blind approach to Hammerstein model identification. IEEE Trans. Signal Process. 2002, 50, 1610–1619. [Google Scholar] [CrossRef]
- Stenger, A.; Kellermann, W. Adaptation of a memoryless preprocessor for nonlinear acoustic echo cancelling. Signal Process. 2000, 80, 1747–1760. [Google Scholar] [CrossRef]
- Shi, K.; Ma, X.; Zhou, G.T. An efficient acoustic echo cancellation design for systems with long room impulses and nonlinear loudspeakers. Signal Process. 2009, 89, 121–132. [Google Scholar] [CrossRef]
- Scarpiniti, M.; Comminiello, D.; Parisi, R.; Uncini, A. Comparison of Hammerstein and Wiener systems for nonlinear acoustic echo cancelers in reverberant environments. In Proceedings of the 17th International Conference on Digital Signal Processing (DSP), Corfu, Greece, 6–8 July 2011; pp. 1–6.
- Kailath, T.; Sayed, A.H.; Hassibi, B. Linear Estimation; Prentice Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Plataniotis, K.N.; Androutsos, D.; Venetsanopoulos, A.N. Nonlinear filtering of non-Gaussian noise. J. Intell. Robot. Syst. 1997, 19, 207–231. [Google Scholar] [CrossRef]
- Weng, B.; Barner, K.E. Nonlinear system identification in impulsive environments. IEEE Trans. Signal Process. 2005, 53, 2588–2594. [Google Scholar] [CrossRef]
- Chen, B.; Zhu, Y.; Hu, J.; Principe, J.C. System Parameter Identification: Information Criteria and Algorithms; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Chen, B.; Xing, L.; Liang, J.; Zheng, N.; Principe, J.C. Steady-state Mean-square Error Analysis for Adaptive Filtering under the Maximum Correntropy Criterion. IEEE Signal Process. Lett. 2014, 21, 880–884. [Google Scholar]
- Principe, J.C. Information Theoretic Learning: Renyi’s Entropy and Kernel Perspectives; Springer: New York, NY, USA, 2010. [Google Scholar]
- Singh, A.; Principe, J.C. Using Correntropy as a cost function in linear adaptive filters. In Proceedings of the IEEE International Joint Conference on Neural Networks (IJCNN), Atlanta, GA, USA, 14–19 June 2009; pp. 2950–2955.
- Chen, B.; Principe, J.C. Maximum correntropy estimation is a smoothed MAP estimation. IEEE Signal Process. Lett. 2012, 19, 491–494. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, B.; Principe, J.C. Kernel adaptive filtering with maximum correntropy criterion. In Proceedings of the IEEE International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 31 July–5 August 2011; pp. 2012–2017.
- Ogunfunmi, T.; Paul, T. The Quaternion Maximum Correntropy Algorithm. IEEE Trans. Circuits Syst. -II (TCAS-II) 2015, 62, 598–602. [Google Scholar] [CrossRef]
- Mandic, D.P.; Hanna, A.I.; Razaz, M. A normalized gradient descent algorithm for nonlinear adaptive filters using a gradient adaptive step size. IEEE Signal Process. Lett. 2001, 8, 295–297. [Google Scholar] [CrossRef]
- Al-Naffouri, T.Y.; Sayed, A.H. Adaptive filters with error non-linearities: Mean-square analysis and optimum design. EURASIP J. Appl. Signal Process. 2001, 4, 192–205. [Google Scholar] [CrossRef]
- Lin, B.; He, R.; Wang, X.; Wang, B. The steady-state mean-square error analysis for least mean p-order algorithm. IEEE Signal Process. Lett. 2009, 16, 176–179. [Google Scholar] [CrossRef]
- Yousef, N.R.; Sayed, A.H. A unified approach to the steady-state and tracking analysis of adaptive filters. IEEE Trans. Signal Process. 2001, 49, 314–324. [Google Scholar] [CrossRef]
- Duttweiler, D.L. Adaptive filter performance with nonlinearities in the correlation multiplier. IEEE Trans. Acoust. Speech Signal Process. 1982, 30, 578–586. [Google Scholar] [CrossRef]
- Mathews, V.J.; Cho, S.H. Improved convergence analysis of stochastic gradient adaptive filters using the sign algorithm. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 450–454. [Google Scholar] [CrossRef]
- Shao, M.; Nikias, C.L. Signal processing with fractional lower order moments: Stable processes and their applications. Proc. IEEE 1993, 81, 986–1010. [Google Scholar] [CrossRef]
- Hasiewicz, Z.; Pawlak, M.; Sliwinski, P. Nonparametric identification of nonlinearities in block-oriented systems by orthogonal wavelets with compact support. IEEE Trans. Circuits Syst. I Regul. 2005, 52, 427–442. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Peng, S.; Chen, B.; Zhao, H. Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion. Entropy 2015, 17, 7149-7166. https://doi.org/10.3390/e17107149
Wu Z, Peng S, Chen B, Zhao H. Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion. Entropy. 2015; 17(10):7149-7166. https://doi.org/10.3390/e17107149
Chicago/Turabian StyleWu, Zongze, Siyuan Peng, Badong Chen, and Haiquan Zhao. 2015. "Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion" Entropy 17, no. 10: 7149-7166. https://doi.org/10.3390/e17107149
APA StyleWu, Z., Peng, S., Chen, B., & Zhao, H. (2015). Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion. Entropy, 17(10), 7149-7166. https://doi.org/10.3390/e17107149