1. Introduction
In applications, data assuming values on the circle, i.e.,
circular data, arise frequently, examples being measurements of wind directions, or time of the day that patients are admitted to a hospital unit. We refer to the literature, e.g., [
1,
2,
3,
4,
5], for an overview of statistical methods for circular data, in particular the ones described in this section.
Here, we will concern ourselves with the arguably simplest statistic, the mean. However, given that a circle does not carry a vector space structure, i.e., there is neither a natural addition of points on the circle nor can one divide them by a natural number, what should the meaning of “mean” be?
In order to simplify the exposition, we specifically consider the unit circle in the complex plane, , and we assume the data can be modelled as independent random variables which are identically distributed as the random variable Z taking values in . In the literature, however, the circle is often taken to lie in the real plane , i.e., while we denote the point on the circle corresponding to an angle by one may take it to be .
Of course, C is a real vector space, so the Euclidean sample mean is well-defined. However, unless all take identical values, it will (by the strict convexity of the closed unit disc) lie inside the circle, i.e., its modulus will be less than 1. Though cannot be taken as a mean on the circle, if , one might say that it specifies a direction; this leads to the idea of calling the circular sample mean of the data.
Observing that the Euclidean sample mean is the minimiser of the sum of squared distances, this can be put in the more general framework of
Fréchet means [
6]: define the
set of circular sample means to be
and analoguously define the
set of circular population means of the random variable
Z to be
Then, as usual, the circular sample means are the circular population means with respect to the empirical distribution of .
The circular population mean can be related to the Euclidean population mean
by noting that
(in statistics, this is called the
bias-variance decomposition), so that
is the set of points on the circle closest to
. It follows that
μ is unique if and only if
in which case it is given by
, the
orthogonal projection of
onto the circle; otherwise, i.e., if
, the set of circular population means is all of
. We consider the information of whether the circular population mean is not unique, e.g., but not exclusively because
Z is uniformly distributed over the circle, to be relevant; it thus should be inferred from the data as well. Analogously,
is either all of
or uniquely given by
according to whether
is 0 or not. Note that
a.s. if
Z is continuously distributed on the circle, even if
.
is what is known as the
vector resultant, while
is sometimes referred to as the
mean direction.
The expected squared distances minimised in Equation (
2) are given by the metric inherited from the ambient space
C; therefore,
μ is also called the set of
extrinsic population means. If we measured distances intrinsically along the circle, i.e., using arc-length instead of chordal distance, we would obtain what is called the set of
intrinsic population means. We will not consider the latter in the following, see e.g., [
7] for a comparison and [
8,
9] for generalizations of these concepts.
Our aim is to construct confidence sets for the circular population mean μ that form a superset of μ with a certain (so-called) coverage probability that is required to be not less than some pre-specified significance level for .
The classical approach is to construct an
asymptotic confidence interval where the coverage probability converges to
when
n tends to infinity. This can be done as follows: since
Z is a bounded random variable,
converges to a bivariate normal distribution when identifying
C with
. Now, assume
so
μ is unique. Then, the orthogonal projection is differentiable in a neighbourhood of
, so the
δ-method (see e.g., [
1] (p. 111) or [
4] (Lemma 3.1)) can be applied and one easily obtains
where
denotes the
argument of a complex number (it is defined arbitrarily at
), while multiplying with
rotates such that
is mapped to
, see e.g., [
4] (Proposition 3.1) or [
7] (Theorem 5). Estimating the asymptotic variance and applying Slutsky’s lemma, one arrives at the asymptotic confidence set
provided
is unique, where the angle determining the interval is given by
with
denoting the
-quantile of the standard normal distribution
.
There are two major drawbacks to the use of asymptotic confidence intervals: firstly, by definition, they do not guarantee a coverage probability of at least
for finite
n, so the coverage probability for a fixed distribution and sample size may be much smaller. Indeed, Simulation 2 in
Section 4 demonstrates that, even for
, the coverage probability may be as low as
when constructing the asymptotic confidence set for
. Secondly, they
assume that
, so they are not applicable to all distributions on the circle. Since in practice it is unknown whether this assumption hold, one would have to test the hypothesis
, possibly again by an asymptotic test, and construct the confidence set conditioned on this hypothesis having been rejected, setting
otherwise. However, this sequential procedure would require some adaptation taking the pre-test into account (cf. e.g., [
10])—we come back to this point in
Section 5—and it is not commonly implemented in practice.
We therefore aim to construct
non-asymptotic confidence sets for
μ, guaranteeing coverage with at least the desired probability for any sample size
n, which in addition are
universal in the sense that they do not make any distributional assumptions about the circular data besides them being independent and identically distributed. It has been shown in [
7] that this is possible; however, the confidence sets that were constructed there were far too large to be of use in practice. Nonetheless, we start by varying that construction in
Section 2 but using Hoeffding’s inequality instead of Chebyshev’s as in [
7]. Considerable improvements are possible if one takes the variance
“perpendicular to
” into account; this is achieved by a second construction in
Section 3. Of course, the latter confidence sets will still be conservative but Proposition 2(iv) shows that they are (for
) only a factor
longer than the asymptotic ones when the sample size
n is large. We further illustrate and compare those confidence sets in simulations and for an application to real data in
Section 4, discussing the results obtained in
Section 5.
2. Construction Using Hoeffding’s Inequality
We will construct a confidence set as the acceptance region of a series of tests. This idea has been used before for the construction of confidence sets for the circular population mean [
7] (Section 6); however, we will modify that construction by replacing Chebyshev’s inequality—which is too conservative here—by three applications of Hoeffding’s inequality [
11] (Theorem 1): if
are independent random variables taking values in the bounded interval
with
Then,
with
fulfills
for any
. The bound on the right-hand side—denoted
—is continuous and strictly decreasing in
t (as expected; see
Appendix A) with
and
whence a unique solution
to the equation
exists for any
. Equivalently,
is strictly decreasing in
Furthermore,
is strictly increasing in
ν (see
Appendix A again), which is also to be expected. While there is no closed form expression for
, it can without difficulty be determined numerically.
Note that the estimate
is often used and called Hoeffding’s inequality [
11]. While this would allow to solve explicitly for
t, we prefer to work with
β as it is sharper, especially for
ν close to
b as well as for large
t. Nonetheless, it shows that the tail bound
tends to zero as fast as if using the central limit theorem which is why it is widely applied for bounded variables, see e.g., [
12].
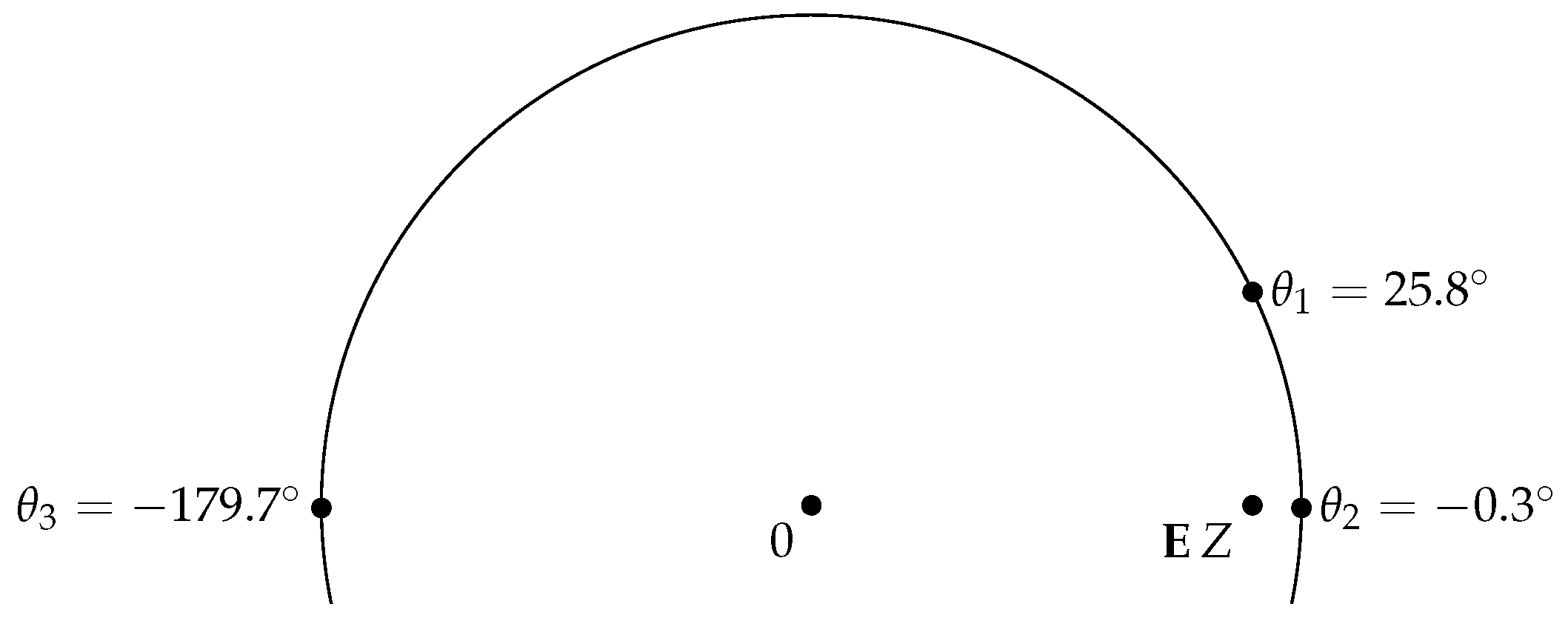
Now, for any , we will test the hypothesis that ζ is a circular population mean. This hypothesis is equivalent to saying that there is some such that . Multiplication by then rotates onto the non-negative real axis: .
Now, fix ζ and consider , for which may be viewed as the projection of onto the line in the direction of ζ and onto the line perpendicular to it. Both are sequences of independent random variables taking values in with and under the hypothesis. They thus fulfill the conditions for Hoeffding’s inequality with , and or 0, respectively.
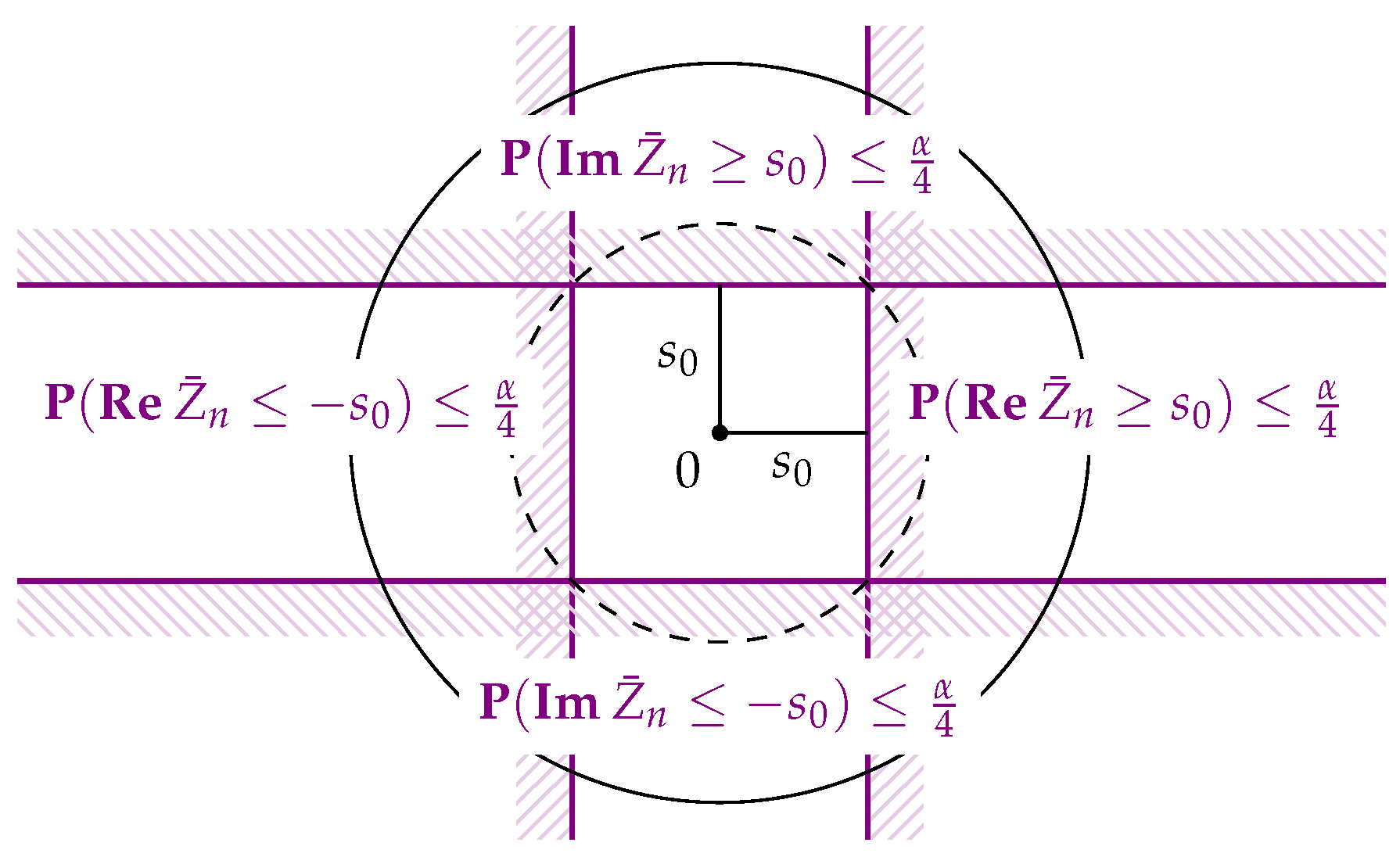
We will first consider the case of non-uniqueness of the circular mean, i.e.,
, or equivalently
. Then, the critical value
is well-defined for any
and we get
, and also, by considering
, that
. Analogously,
. We conclude that
Rejecting the hypothesis
, i.e.,
, if
thus leads to a test whose probability of false rejection is at most
α (see
Figure 1). Of course, one may work with
and
as criterions for rejection; however, we prefer working with
since it is independent of the chosen
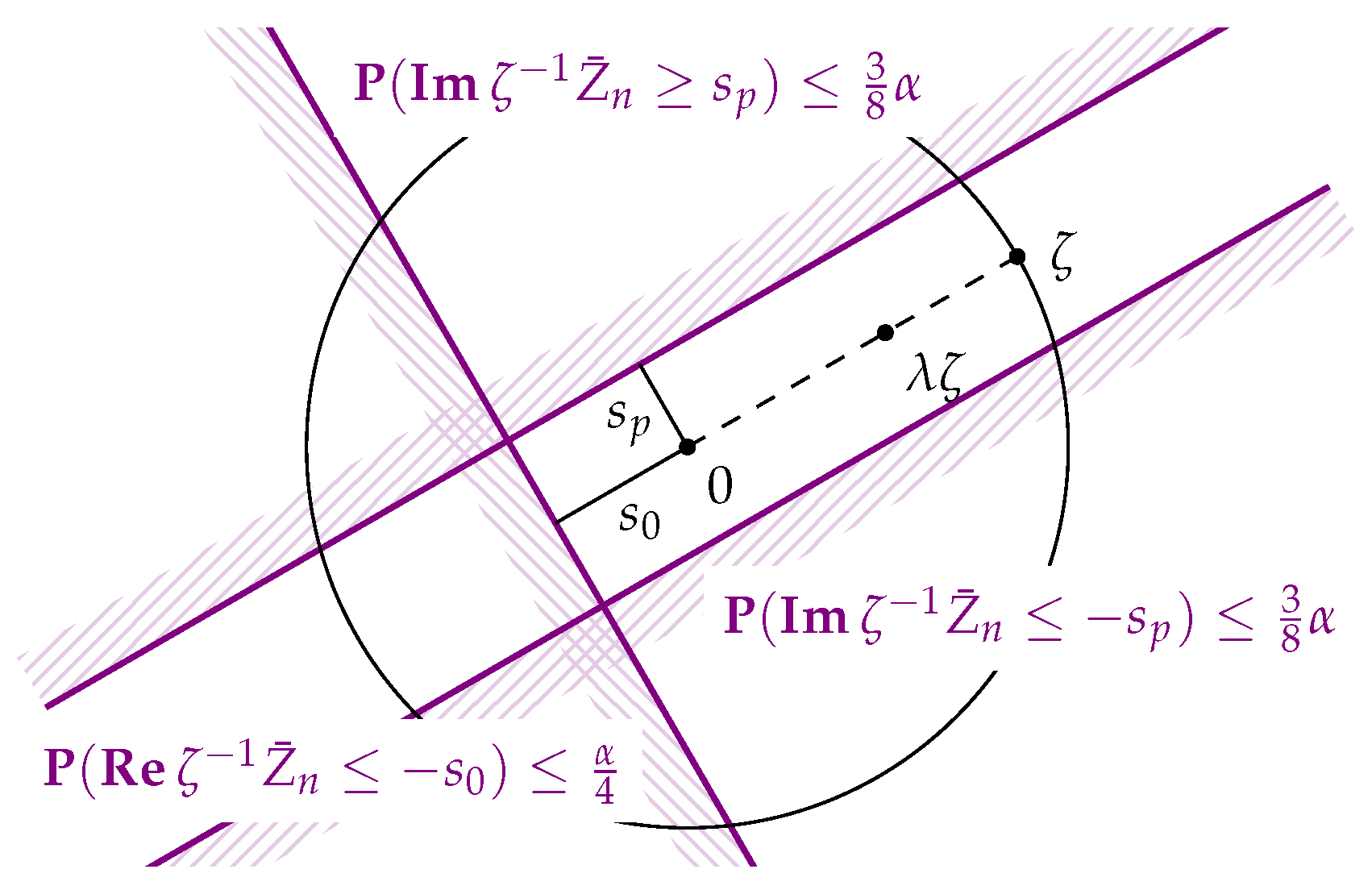
In the case of uniqueness of the circular mean, i.e., for the hypothesis
, we use the monotonicity of
in
ν and obtain
as well. For the direction perpendicular to the direction of
ζ (see
Figure 2), however, we may now work with
, so for
—which is well-defined whenever
is since
—we obtain
Rejecting if
or
, then, will happen with probability at most
under the hypothesis
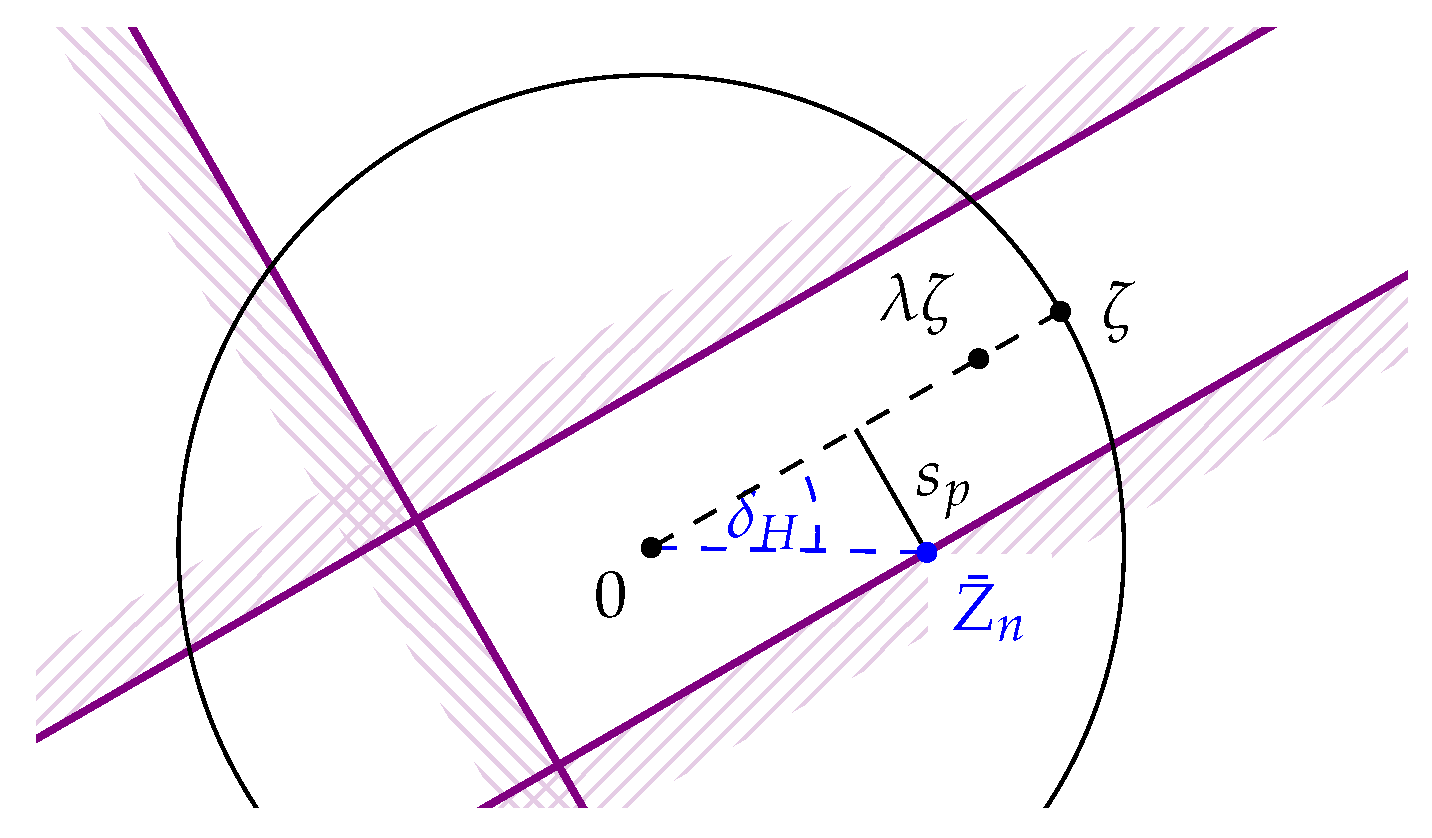
. In case that we already rejected the hypothesis
, i.e., if
,
ζ will not be rejected if and only if
and
which is then equivalent to
(see
Figure 3).
Define
as all
ζ which we could not reject, i.e.,
Then, we obtain the following result:
Proposition 1. Let be random variables taking values on the unit circle , and let be defined as in Equation (
8)
.- (i)
is a -confidence set for the circular population mean set. In particular, if , i.e., the circular population mean set equals , then with probability at most so indeed with probability at least
- (ii)
and are of order .
- (iii)
If then in probability and the probability of obtaining the trivial confidence set, i.e., , goes to 0 exponentially fast.
Proof. (i) holds by construction.
For (ii), recall Equation (
7), from which we obtain the estimates
resp.
, implying that
and
are of order
the same holds stochastically for
since
a.s. Regarding the second statement of (iii), if
μ is unique, consider
; then,
and
is eventually less than
and also
eventually. Hence, the probability of obtaining the trivial confidence set
is eventually bounded by
, and thus will go to zero exponentially fast as
n tends to infinity. ☐
3. Estimating the Variance
From the central limit theorem for
in case of unique
μ, cf. Equation (
4), we see that the aymptotic variance of
gets small if
is close to 1 (then
is close to the boundary
of the unit disc, which is possible only if the distribution is very concentrated) or if the variance
in the direction perpendicular to
μ is small (if the distribution were concentrated on
, this variance would be zero and
would equal
μ with large probability). While
(
being the denominator of its sine) takes the former into account, the latter has not been exploited yet. To do so, we need to estimate
.
Consider
that is under the hypothesis that the corresponding
ζ is the unique circular population mean has expectation
. Now,
is the mean of
n independent random variables taking values in
and having expectation
. By another application of Equation (
6), we obtain
for
, the latter existing if
. Since
increases with
, there is a minimal
for which
holds and becomes an equality; we denote it by
. Inserting into Equation (
6), it by construction fulfills
It is easy to see that the right-hand side depends continuously on and is strictly decreasing in
(see
Appendix A), thereby traversing the interval
so that one can again solve the equation numerically. We then may, with an error probability of at most
, use
as an upper bound for
. Note that
exists if
The latter is fulfilled for any
since Equation (
9) is equivalent to
For
, let
be the trivial bound.
With such an upper bound on its variance, we now can get a better estimate for
. Indeed, one may use another inequality by Hoeffding [
11] (Theorem 3): the mean
of a sequence
of independent random variables taking values in
, each having zero expectation as well as variance
fulfills
for any
Again, an elementary calculation (analogous to Lemma A1) shows that the right-hand side of Equation (
10) is strictly decreasing in
w, continuously ranging between 1 and
as
w varies in
, so that there exists a unique
for which the right-hand side equals
γ, provided
. Moreover, the right-hand side increases with
(as expected), so that
is increasing in
, too (cf.
Appendix A).
Therefore, under the hypothesis that the corresponding ζ is the unique circular population mean, . Now, since , setting we get . Note that increases with , so in case exists, implies , i.e., the existence of .
Following the construction for
from
Section 2, we can again obtain a confidence set for
μ with coverage probability at least
as shown in our previous article [
13]. In practice however, this confidence set is hard to calculate since
has to be calculated for every
Though these confidence sets can be approximated by using a grid as in [
13], we suggest using a simultaneous upper bound for the variance of
.
We obtain a (conservative) connected, symmetric confidence set
by testing
with
as a common upper bound for the variance perpendicular to any
. Note that
can be obtained as the solution of Equation (
9) with
Furthermore, we can shorten
by iteratively redefining
and recalculating
(see Algorithm 1). The resulting opening angle will be denoted by
| Algorithm 1: Algorithm for computation of . |
![Entropy 18 00375 i001]() |
Proposition 2. Let be random variables taking values on the unit circle and let - (i)
The set resulting from Algorithm 1 is a -confidence set for the circular population mean set. In particular, if , i.e., the circular population mean set equals , then with probability at most so indeed with probability of at least
- (ii)
is of order .
- (iii)
If i.e., if the circular population mean is unique, then in probability, and the probability of obtaining a trivial confidence set, i.e., , goes to 0 exponentially fast.
- (iv)
If , thenwith denoting the -quantile of the standard normal distribution
Proof. Again, (i) follows by construction, while (iii) is shown as in Proposition 1.
For (ii), note that
since the bound in Equation (
10) for
agrees with the bound in Equation (
6) for
and
thus
and
are at least of the order
For (iv), we will use the estimate in Equation (
11). Recall that
; therefore, for large
n and hence small
a.s.
thus
Additionally,
for
x close to 0 which gives
a.s.
Furthermore,
a.s. for
, and we obtain
since
(see Equation (
5)). ☐








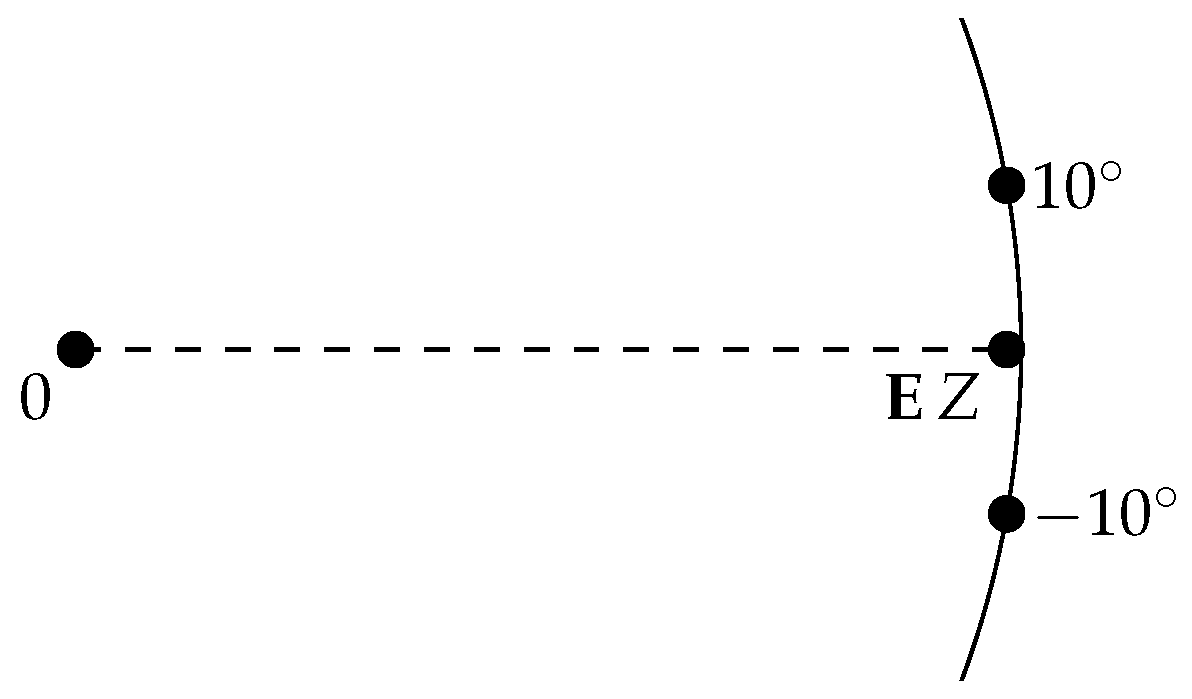
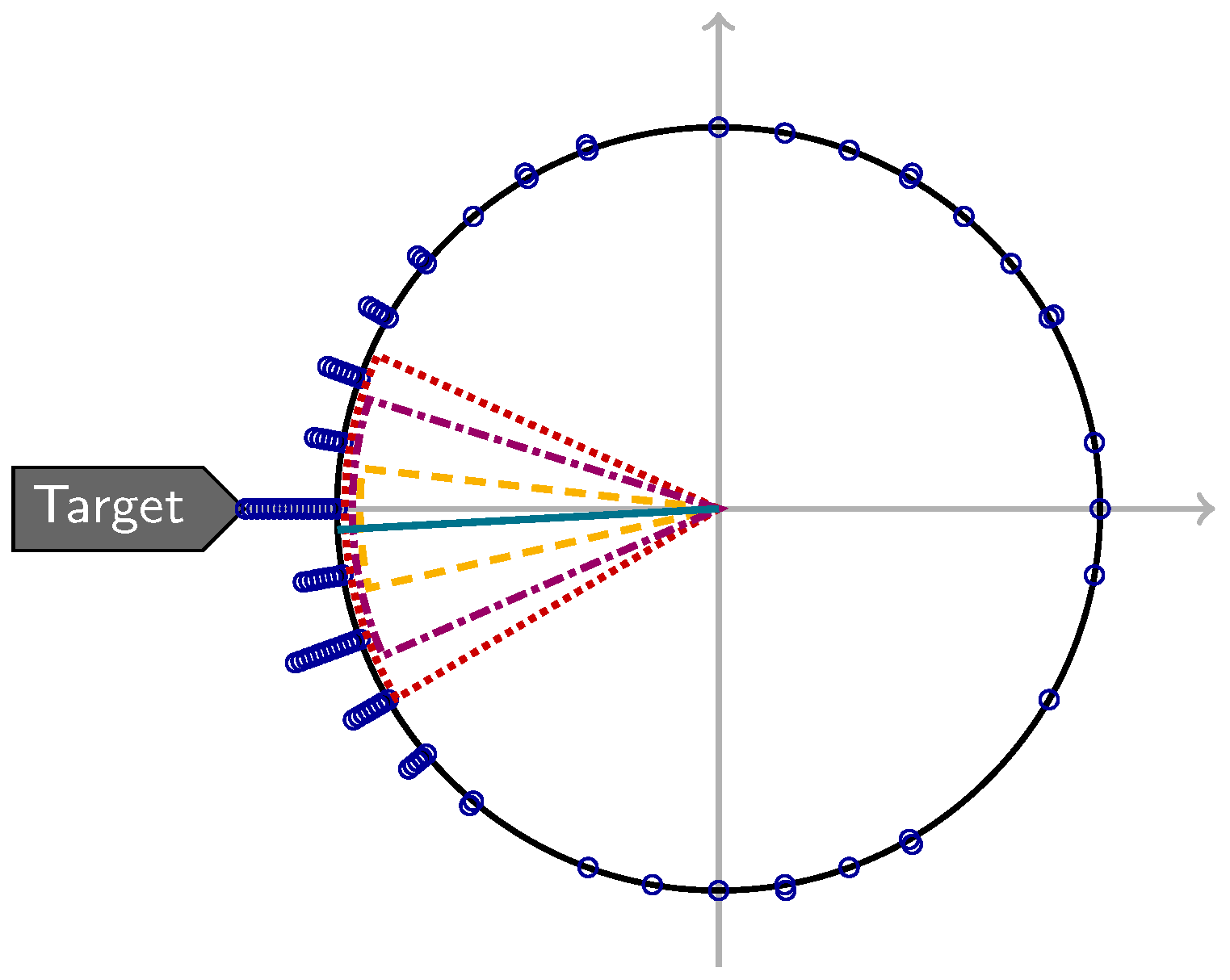
 ) placed at increasing radii to visually resolve ties; in addition, the circular mean direction (
) placed at increasing radii to visually resolve ties; in addition, the circular mean direction (  ) as well as confidence sets (
) as well as confidence sets (  ), (
), (  ), and (
), and (  ) are shown.
) are shown.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}