Sample Entropy of Human Gait Center of Pressure Displacement: A Systematic Methodological Analysis



Abstract
:1. Introduction
2. Materials and Methods
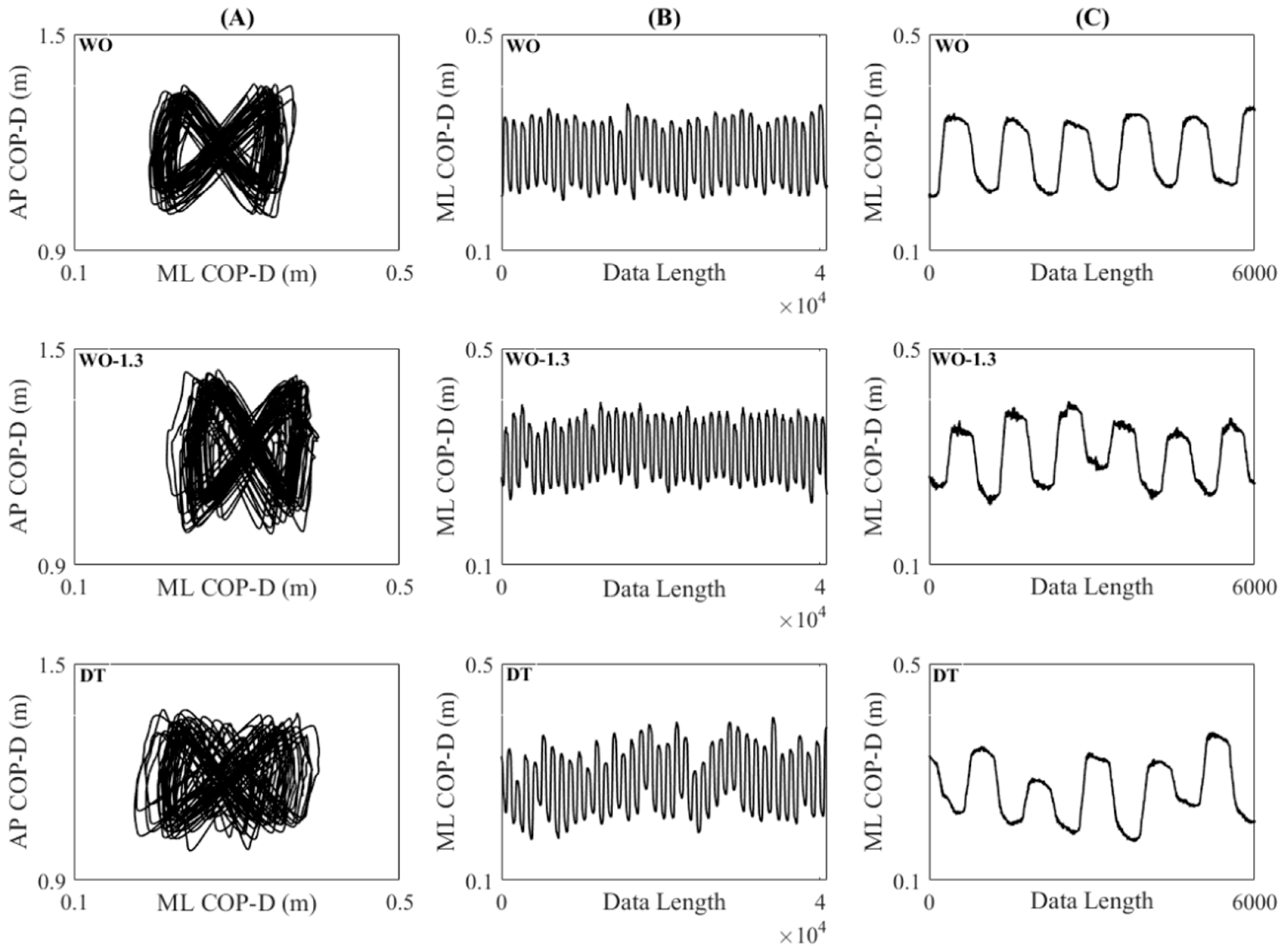
2.1. Experimental Procedure
- (a)
- Walk only (WO) trial of 1 min at a speed of 1.0 m/s, and
- (b)
- Dual-task (DT) walking trial of 1 min at a speed of 1.0 m/s, which is described below, and
- (c)
- Walk only trial of 1 min at a speed of 1.3 m/s (WO-1.3).
2.2. Sample Entropy
2.3. Data Analysis
- decimation (D),
- decimation-and-resampling (D-R),
- filtering-and-downsampling (FD) and,
- filtering-and-downsampling-and-resampling (FD-R).
2.4. Statistical Analysis
- A two-factor repeated measure ANOVA (walking condition*m) was performed at each f level while considering the first tolerance level.
- A two-factor repeated measure ANOVA (walking condition*m) was performed at each f level while considering the second tolerance level.
- A two-factor repeated measure ANOVA (walking condition*f) was performed at each m level while considering the first tolerance level.
- A two-factor repeated measure ANOVA (walking condition*f) was performed at each m level while considering the second tolerance level.
- Post hoc pairwise comparisons with Bonferroni correction were performed to examine the effect of dual-tasking at each level.
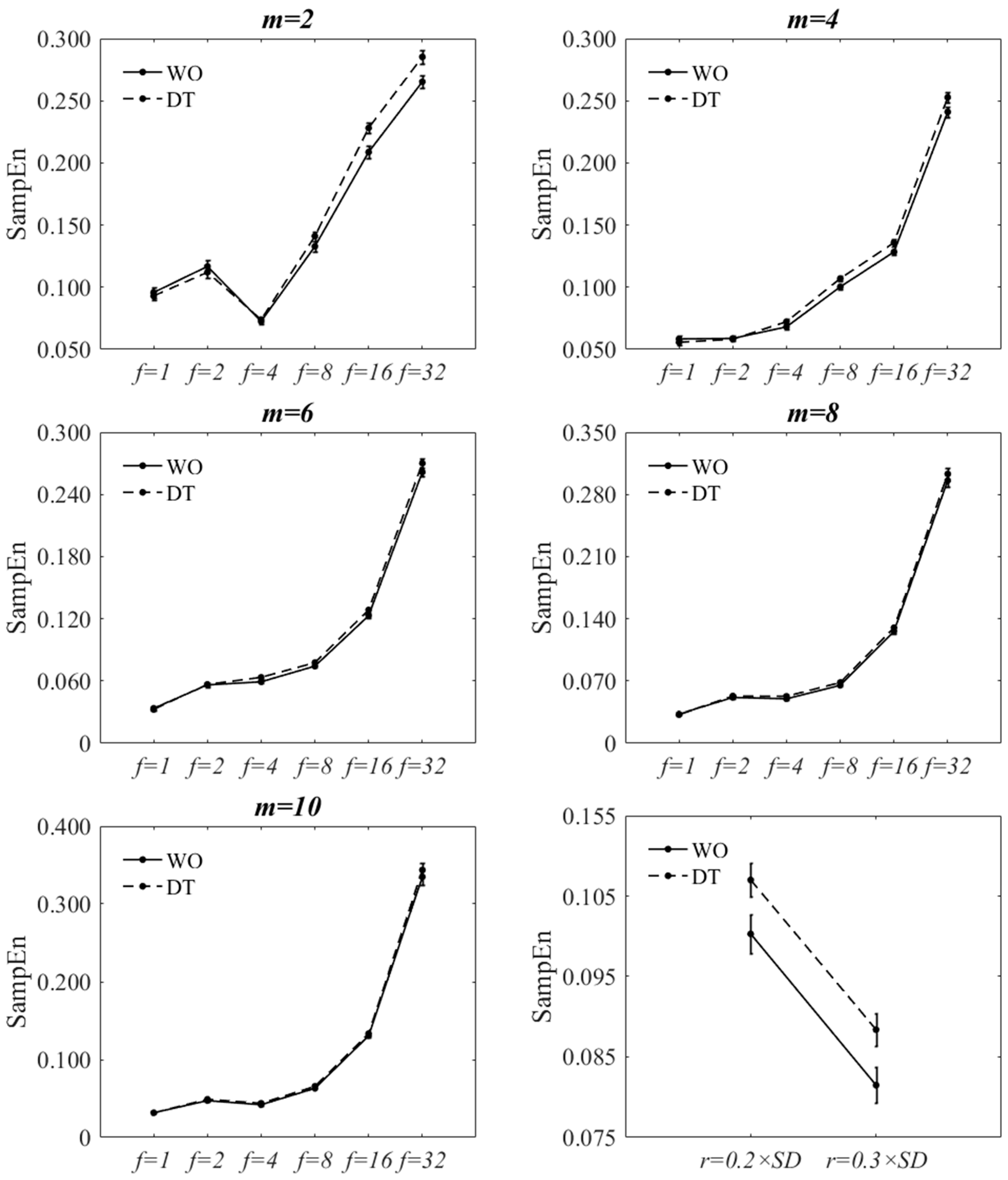
- Finally, a two-factor (walking condition*r) repeated measure ANOVA was performed at fixed m = 4 and f = 8 values, which were chosen based on the previous step’s statistical results.
- walking condition (WO versus DT) and preprocessing method (D, D-R, FD, FD-R)
- gait speed (1.0 m/s versus 1.3 m/s) and preprocessing method (D, D-R, FD, FD-R)
3. Results
3.1. Sensitivity of SampEn to Variant Parameter Values When Using Filtering-and-Downsampling
3.2. Sensitivity of SampEn to Variant Parameter Values When Using Decimation
3.3. Effects of Preprocessing Methods
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FD | D | ||||||
|---|---|---|---|---|---|---|---|
| WO | DT | p-Value | WO | DT | p-Value | ||
| f = 1 | m = 2 | 0.014 ± 0.002 | 0.015 ± 0.002 | 0.008 | 0.096 ± 0.023 | 0.093 ± 0.020 | - |
| m = 4 | 0.014 ± 0.002 | 0.015 ± 0.002 | 0.008 | 0.058 ± 0.015 | 0.056 ± 0.012 | ||
| m = 6 | 0.015 ± 0.003 | 0.016 ± 0.003 | 0.008 | 0.034 ± 0.007 | 0.033 ± 0.005 | ||
| m = 8 | 0.015 ± 0.003 | 0.016 ± 0.003 | 0.008 | 0.033 ± 0.007 | 0.032 ± 0.005 | ||
| m = 10 | 0.015 ± 0.003 | 0.017 ± 0.003 | 0.004 | 0.032 ± 0.007 | 0.032 ± 0.004 | ||
| f = 2 | m = 2 | 0.028 ± 0.005 | 0.030 ± 0.005 | 0.008 | 0.117 ± 0.029 | 0.112 ± 0.024 | - |
| m = 4 | 0.030 ± 0.006 | 0.032 ± 0.005 | 0.008 | 0.059 ± 0.011 | 0.058 ± 0.008 | ||
| m = 6 | 0.031 ± 0.005 | 0.034 ± 0.006 | 0.002 | 0.056 ± 0.011 | 0.057 ± 0.008 | ||
| m = 8 | 0.030 ± 0.005 | 0.033 ± 0.004 | 0.001 | 0.051 ± 0.009 | 0.053 ± 0.006 | ||
| m = 10 | 0.029 ± 0.004 | 0.032 ± 0.004 | <0.001 | 0.047 ± 0.008 | 0.049 ± 0.005 | ||
| f = 4 | m = 2 | 0.058 ± 0.011 | 0.063 ± 0.011 | 0.008 | 0.073 ± 0.014 | 0.074 ± 0.012 | 0.568 |
| m = 4 | 0.060 ± 0.010 | 0.067 ± 0.009 | 0.001 | 0.068 ± 0.011 | 0.072 ± 0.010 | 0.042 | |
| m = 6 | 0.055 ± 0.007 | 0.060 ± 0.006 | <0.001 | 0.059 ± 0.008 | 0.063 ± 0.007 | 0.011 | |
| m = 8 | 0.045 ± 0.006 | 0.049 ± 0.006 | 0.002 | 0.050 ± 0.006 | 0.053 ± 0.006 | 0.035 | |
| m = 10 | 0.037 ± 0.004 | 0.040 ± 0.005 | 0.002 | 0.042 ± 0.004 | 0.044 ± 0.005 | 0.058 | |
| f = 8 | m = 2 | 0.121 ± 0.020 | 0.134 ± 0.021 | 0.002 | 0.133 ± 0.022 | 0.141 ± 0.021 | 0.042 |
| m = 4 | 0.095 ± 0.012 | 0.103 ± 0.011 | 0.001 | 0.100 ± 0.013 | 0.107 ± 0.011 | 0.013 | |
| m = 6 | 0.068 ± 0.007 | 0.073 ± 0.008 | 0.002 | 0.074 ± 0.007 | 0.078 ± 0.009 | 0.041 | |
| m = 8 | 0.061 ± 0.006 | 0.064 ± 0.007 | 0.001 | 0.065 ± 0.006 | 0.068 ± 0.007 | 0.008 | |
| m = 10 | 0.059 ± 0.006 | 0.063 ± 0.007 | 0.001 | 0.063 ± 0.007 | 0.066 ± 0.007 | 0.015 | |
| f = 16 | m = 2 | 0.208 ± 0.025 | 0.228 ± 0.022 | <0.001 | 0.209 ± 0.026 | 0.228 ± 0.022 | 0.001 |
| m = 4 | 0.123 ± 0.012 | 0.132 ± 0.014 | 0.001 | 0.128 ± 0.012 | 0.136 ± 0.015 | 0.002 | |
| m = 6 | 0.119 ± 0.012 | 0.126 ± 0.013 | 0.001 | 0.123 ± 0.012 | 0.128 ± 0.013 | 0.007 | |
| m = 8 | 0.122 ± 0.011 | 0.128 ± 0.012 | 0.010 | 0.126 ± 0.012 | 0.130 ± 0.012 | 0.049 | |
| m = 10 | 0.127 ± 0.011 | 0.131 ± 0.012 | 0.052 | 0.130 ± 0.012 | 0.133 ± 0.012 | 0.181 | |
| f = 32 | m = 2 | 0.267 ± 0.027 | 0.288 ± 0.030 | <0.001 | 0.265 ± 0.026 | 0.285 ± 0.030 | 0.001 |
| m = 4 | 0.243 ± 0.023 | 0.254 ± 0.024 | 0.004 | 0.241 ± 0.023 | 0.253 ± 0.023 | 0.004 | |
| m = 6 | 0.262 ± 0.023 | 0.270 ± 0.025 | 0.051 | 0.262 ± 0.023 | 0.270 ± 0.025 | 0.037 | |
| m = 8 | 0.295 ± 0.037 | 0.302 ± 0.036 | 0.138 | 0.296 ± 0.037 | 0.303 ± 0.036 | 0.105 | |
| m = 10 | 0.332 ± 0.052 | 0.340 ± 0.045 | 0.224 | 0.335 ± 0.053 | 0.344 ± 0.047 | 0.154 | |
| FD | D | ||||||
|---|---|---|---|---|---|---|---|
| WO | DT | p-Value | WO | DT | p-Value | ||
| f = 1 | m = 2 | 0.009 ± 0.002 | 0.010 ± 0.002 | 0.012 | 0.058 ± 0.014 | 0.057 ± 0.011 | - |
| m = 4 | 0.009 ± 0.002 | 0.010 ± 0.002 | 0.012 | 0.034 ± 0.008 | 0.032 ± 0.006 | ||
| m = 6 | 0.010 ± 0.002 | 0.010 ± 0.002 | 0.011 | 0.019 ± 0.003 | 0.019 ± 0.002 | ||
| m = 8 | 0.010 ± 0.002 | 0.011 ± 0.002 | 0.011 | 0.018 ± 0.003 | 0.018 ± 0.002 | ||
| m = 10 | 0.010 ± 0.002 | 0.011 ± 0.002 | 0.011 | 0.018 ± 0.003 | 0.018 ± 0.002 | ||
| f = 2 | m = 2 | 0.019 ± 0.003 | 0.020 ± 0.003 | 0.012 | 0.069 ± 0.016 | 0.067 ± 0.013 | - |
| m = 4 | 0.019 ± 0.003 | 0.021 ± 0.003 | 0.011 | 0.034 ± 0.006 | 0.034 ± 0.004 | ||
| m = 6 | 0.020 ± 0.004 | 0.022 ± 0.004 | 0.011 | 0.032 ± 0.006 | 0.032 ± 0.004 | ||
| m = 8 | 0.021 ± 0.004 | 0.023 ± 0.004 | 0.005 | 0.031 ± 0.006 | 0.032 ± 0.004 | ||
| m = 10 | 0.021 ± 0.003 | 0.023 ± 0.003 | 0.002 | 0.030 ± 0.005 | 0.031 ± 0.004 | ||
| f = 4 | m = 2 | 0.038 ± 0.007 | 0.041 ± 0.007 | 0.011 | 0.047 ± 0.009 | 0.048 ± 0.007 | 0.578 |
| m = 4 | 0.041 ± 0.008 | 0.045 ± 0.008 | 0.006 | 0.046 ± 0.009 | 0.048 ± 0.008 | 0.130 | |
| m = 6 | 0.041 ± 0.006 | 0.045 ± 0.006 | 0.001 | 0.044 ± 0.007 | 0.047 ± 0.007 | 0.018 | |
| m = 8 | 0.039 ± 0.005 | 0.043 ± 0.005 | 0.001 | 0.041 ± 0.006 | 0.044 ± 0.005 | 0.007 | |
| m = 10 | 0.035 ± 0.004 | 0.038 ± 0.004 | 0.001 | 0.037 ± 0.005 | 0.040 ± 0.004 | 0.008 | |
| f = 8 | m = 2 | 0.081 ± 0.015 | 0.088 ± 0.015 | 0.008 | 0.089 ± 0.017 | 0.093 ± 0.016 | 0.127 |
| m = 4 | 0.079 ± 0.011 | 0.087 ± 0.010 | 0.001 | 0.081 ± 0.012 | 0.088 ± 0.011 | 0.005 | |
| m = 6 | 0.065 ± 0.007 | 0.070 ± 0.007 | 0.001 | 0.068 ± 0.008 | 0.072 ± 0.007 | 0.010 | |
| m = 8 | 0.054 ± 0.004 | 0.058 ± 0.005 | <0.001 | 0.057 ± 0.005 | 0.060 ± 0.006 | 0.003 | |
| m = 10 | 0.050 ± 0.004 | 0.053 ± 0.005 | <0.001 | 0.053 ± 0.004 | 0.055 ± 0.005 | 0.002 | |
| f = 16 | m = 2 | 0.161 ± 0.024 | 0.178 ± 0.024 | 0.001 | 0.163 ± 0.025 | 0.178 ± 0.024 | 0.002 |
| m = 4 | 0.112 ± 0.010 | 0.120 ± 0.011 | <0.001 | 0.115 ± 0.010 | 0.122 ± 0.012 | 0.001 | |
| m = 6 | 0.100 ± 0.008 | 0.105 ± 0.010 | <0.001 | 0.102 ± 0.009 | 0.107 ± 0.010 | 0.002 | |
| m = 8 | 0.102 ± 0.009 | 0.106 ± 0.010 | 0.004 | 0.104 ± 0.010 | 0.108 ± 0.011 | 0.014 | |
| m = 10 | 0.106 ± 0.010 | 0.109 ± 0.010 | 0.042 | 0.108 ± 0.010 | 0.111 ± 0.011 | 0.102 | |
| f = 32 | m = 2 | 0.247 ± 0.024 | 0.268 ± 0.024 | <0.001 | 0.246 ± 0.024 | 0.265 ± 0.024 | <0.001 |
| m = 4 | 0.202 ± 0.018 | 0.212 ± 0.021 | 0.001 | 0.201 ± 0.018 | 0.211 ± 0.020 | 0.001 | |
| m = 6 | 0.219 ± 0.021 | 0.225 ± 0.022 | 0.069 | 0.218 ± 0.021 | 0.224 ± 0.022 | 0.066 | |
| m = 8 | 0.240 ± 0.029 | 0.245 ± 0.030 | 0.143 | 0.241 ± 0.030 | 0.246 ± 0.030 | 0.156 | |
| m = 10 | 0.255 ± 0.035 | 0.260 ± 0.034 | 0.220 | 0.257 ± 0.036 | 0.263 ± 0.035 | 0.211 | |
References
- Kaptein, R.G.; Wezenberg, D.; IJmker, T.; Houdijk, H.; Beek, P.J.; Lamoth, C.J.; Daffertshofer, A. Shotgun approaches to gait analysis: Insights & limitations. J. Neuroeng. Rehabil. 2014, 11, 120. [Google Scholar] [PubMed]
- Pincus, S.M.; Goldberger, A.L. Physiological time-series analysis: What does regularity quantify? Am. J. Physiol. 1994, 266, H1643–H1656. [Google Scholar] [CrossRef] [PubMed]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef] [PubMed]
- Gow, B.; Peng, C.-K.; Wayne, P.; Ahn, A. Multiscale Entropy Analysis of Center-of-Pressure Dynamics in Human Postural Control: Methodological Considerations. Entropy 2015, 17, 7926–7947. [Google Scholar] [CrossRef] [Green Version]
- Lake, D.E.; Richman, J.S.; Griffin, M.P.; Moorman, J.R. Sample entropy analysis of neonatal heart rate variability. Am. J. Physiol. Regul. Integr. Comp. Physiol. 2002, 283, R789–R797. [Google Scholar] [CrossRef] [PubMed]
- Ihlen, E.A.F.; Weiss, A.; Bourke, A.; Helbostad, J.L.; Hausdorff, J.M. The complexity of daily life walking in older adult community-dwelling fallers and non-fallers. J. Biomech. 2016, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Ahmadi, S.; Wu, C.; Sepehri, N.; Kantikar, A.; Nankar, M.; Szturm, T. The Effects of Aging and Dual Tasking on Human Gait Complexity During Treadmill Walking: A Comparative Study Using Quantized Dynamical Entropy and Sample Entropy. J. Biomech. Eng. 2018, 140, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Bisi, M.; Riva, F.; Stagni, R. Measures of gait stability: Performance on adults and toddlers at the beginning of independent walking. J. Neuroeng. Rehabil. 2014, 11, 131. [Google Scholar] [CrossRef] [PubMed]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Pincus, S. Approximate entropy (ApEn) as a complexity measure. Chaos 1995, 5, 110–117. [Google Scholar] [CrossRef] [PubMed]
- Yentes, J.M.; Hunt, N.; Schmid, K.K.; Kaipust, J.P.; McGrath, D.; Stergiou, N. The appropriate use of approximate entropy and sample entropy with short data sets. Ann. Biomed. Eng. 2013, 41, 349–365. [Google Scholar] [CrossRef] [PubMed]
- Costa, M.; Peng, C.K.; Goldberger, A.L.; Hausdorff, J.M. Multiscale entropy analysis of human gait dynamics. Phys. A Stat. Mech. Appl. 2003, 330, 53–60. [Google Scholar] [CrossRef]
- Van Schooten, K.S.; Pijnappels, M.; Rispens, S.M.; Elders, P.J.M.; Lips, P.; Daffertshofer, A.; Beek, P.J.; Van Dieën, J.H. Daily-life gait quality as predictor of falls in older people: A 1-year prospective cohort study. PLoS ONE 2016, 11, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Lamoth, C.J.; van Deudekom, F.J.; van Campen, J.P.; Appels, B.A.; de Vries, O.J.; Pijnappels, M. Gait stability and variability measures show effects of impaired cognition and dual tasking in frail people. J. Neuroeng. Rehabil. 2011, 8, 2. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kurz, M.J.; Hou, J.G. Levodopa influences the regularity of the ankle joint kinematics in individuals with Parkinson’s disease. J. Comput. Neurosci. 2010, 28, 131–136. [Google Scholar] [CrossRef] [PubMed]
- Leverick, G.; Szturm, T.; Wu, C.Q. Using Entropy Measures to Characterize Human Locomotion. J. Biomech. Eng. 2014, 136, 121002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fino, P.C.; Mojdehi, A.R.; Adjerid, K.; Habibi, M.; Lockhart, T.E.; Ross, S.D. Comparing Postural Stability Entropy Analyses to Differentiate Fallers and Non-fallers. Ann. Biomed. Eng. 2016, 44, 1636–1645. [Google Scholar] [CrossRef] [PubMed]
- Rhea, C.K.; Kiefer, A.W.; Wright, W.G.; Raisbeck, L.D.; Haran, F.J. Interpretation of postural control may change due to data processing techniques. Gait Posture 2015, 41, 731–735. [Google Scholar] [CrossRef] [PubMed]
- Ramdani, S.; Seigle, B.; Lagarde, J.; Bouchara, F.; Bernard, P.L. On the use of sample entropy to analyze human postural sway data. Med. Eng. Phys. 2009, 31, 1023–1031. [Google Scholar] [CrossRef] [PubMed]
- Terrier, P.; Dériaz, O. Non-linear dynamics of human locomotion: Effects of rhythmic auditory cueing on local dynamic stability. Front. Physiol. 2013, 4, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Yentes, J.M.; Denton, W.; Mccamley, J.; Ra, P.C.; Schmid, K.K. Effect of parameter selection on entropy calculation for long walking trials. Gait Posture 2018, 60, 128–134. [Google Scholar] [CrossRef] [PubMed]
- Howcroft, J.; Kofman, J.; Lemaire, E.D.; McIlroy, W.E. Analysis of Dual-Task Elderly Gait in Fallers and Non-Fallers using Wearable Sensors. J. Biomech. 2016, 49, 992–1001. [Google Scholar] [CrossRef] [PubMed]
- Bruijn, S.M.; van Dieën, J.H.; Meijer, O.G.; Beek, P.J. Is slow walking more stable? J. Biomech. 2009, 42, 1506–1512. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, H.G.; Dingwell, J.B. Effects of walking speed, strength and range of motion on gait stability in healthy older adults. J. Biomech. 2008, 41, 2899–2905. [Google Scholar] [CrossRef] [PubMed]
- Rispens, S.M.; Dieën, J.H. Van; Schooten, K.S. Van; Lizama, L.E.C.; Daffertshofer, A.; Beek, P.J.; Pijnappels, M. Fall-related gait characteristics on the treadmill and in daily life. J. Neuroeng. Rehabil. 2016, 13, 12. [Google Scholar] [CrossRef] [PubMed]
- Katsavelis, D.; Mukherjee, M.; Decker, L.; Stergiou, N. Variability of lower extremity joint kinematics during backward walking in a virtual environment. Nonlinear Dyn. Psychol. Life Sci. 2010, 14, 165–178. [Google Scholar]
- Kavanagh, J.; Barrett, R.; Morrison, S. The role of the neck and trunk in facilitating head stability during walking. Exp. Brain Res. 2006, 172, 454–463. [Google Scholar] [CrossRef] [PubMed]
- Dingwell, J.B.; Robb, R.T.; Troy, K.L.; Grabiner, M.D. Effects of an attention demanding task on dynamic stability during treadmill walking. J. Neuroeng. Rehabil. 2008, 5, 12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Szturm, T.; Maharjan, P.; Marotta, J.J.; Shay, B.; Shrestha, S.; Sakhalkar, V. The interacting effect of cognitive and motor task demands on performance of gait, balance and cognition in young adults. Gait Posture 2013, 38, 596–602. [Google Scholar] [CrossRef] [PubMed]
- Sloot, L.H.; Houdijk, H.; Harlaar, J. Technical note A comprehensive protocol to test instrumented treadmills. Med. Eng. Phys. 2015, 37, 610–616. [Google Scholar] [CrossRef] [PubMed]
- England, S.A.; Granata, K.P. The influence of gait speed on local dynamic stability of walking. Gait Posture 2007, 25, 172–178. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riva, F.; Toebes, M.J.P.; Pijnappels, M.; Stagni, R.; van Dieën, J.H. Estimating fall risk with inertial sensors using gait stability measures that do not require step detection. Gait Posture 2013, 38, 170–174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vaillancourt, D.E.; Newell, K.M. Changing complexity in human behavior and physiology through aging and disease. Neurobiol. Aging 2002, 23, 1–11. [Google Scholar] [CrossRef]
- Dorfman, M.; Herman, T.; Brozgol, M.; Shema, S.; Weiss, A.; Hausdorff, J.; Mirelman, A. Dual-Task Training on a Treadmill to Improve Gait and Cognitive Function in Elderly Idiopathic Fallers. J. Neurol. Phys. Ther. 2014, 38, 246–253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lamoth, C.J.C.; Ainsworth, E.; Polomski, W.; Houdijk, H. Variability and stability analysis of walking of transfemoral amputees. Med. Eng. Phys. 2010, 32, 1009–1014. [Google Scholar] [CrossRef] [PubMed]
- Restrepo, J.F.; Schlotthauer, G.; Torres, M.E. Maximum approximate entropy and threshold: A new approach for regularity changes detection. Phys. A Stat. Mech. Appl. 2014, 409, 97–109. [Google Scholar] [CrossRef] [Green Version]
- Govindan, R.B.; Wilson, J.D.; Eswaran, H.; Lowery, C.L.; Preissl, H. Revisiting sample entropy analysis. Phys. A Stat. Mech. Appl. 2007, 376, 158–164. [Google Scholar] [CrossRef]






| f | Sampling Rate (Hz) | Cut-Off Frequency (Hz) | |
|---|---|---|---|
| Decimation | Filtering-and-Downsampling | ||
| 1 | 1000 | 800 | 30 |
| 2 | 500 | 400 | 30 |
| 4 | 250 | 200 | 30 |
| 8 | 125 | 100 | 30 |
| 16 | 62 | 50 | 30 |
| 32 | 31 | 25 | 30 |
| W-C | f | W-C*f | W-C | f | W-C*f | ||||
| FD | m = 2 | <0.001 | <0.001 | <0.001 | D | m = 2 | 0.009 | <0.001 | <0.001 |
| m = 4 | <0.001 | <0.001 | 0.006 | m = 4 | 0.009 | <0.001 | <0.001 | ||
| m = 6 | 0.001 | <0.001 | 0.123 | m = 6 | 0.021 | <0.001 | 0.023 | ||
| m = 8 | 0.004 | <0.001 | 0.334 | m = 8 | 0.037 | <0.001 | 0.070 | ||
| m = 10 | 0.020 | <0.001 | 0.421 | m =10 | 0.075 | <0.001 | 0.211 | ||
| W-C | f | W-C*f | W-C | f | W-C*f | ||||
| FD | m = 2 | <0.001 | <0.001 | <0.001 | D | m = 2 | 0.008 | <0.001 | <0.001 |
| m = 4 | <0.001 | <0.001 | <0.001 | m = 4 | 0.001 | <0.001 | <0.001 | ||
| m = 6 | 0.002 | <0.001 | 0.080 | m = 6 | 0.015 | <0.001 | 0.034 | ||
| m = 8 | 0.006 | <0.001 | 0.232 | m = 8 | 0.032 | <0.001 | 0.154 | ||
| m = 10 | 0.020 | <0.001 | 0.387 | m = 10 | 0.068 | <0.001 | 0.279 |
| W-C | m | W-C*m | W-C | m | W-C*m | ||||
| FD | f = 1 | 0.007 | <0.001 | 0.001 | D | f = 1 | 0.094 | <0.001 | 0.004 |
| f = 2 | 0.002 | <0.001 | 0.007 | f = 2 | 0.806 | <0.001 | 0.000 | ||
| f = 4 | <0.001 | <0.001 | 0.128 | f = 4 | 0.049 | <0.001 | 0.176 | ||
| f = 8 | <0.001 | <0.001 | 0.015 | f = 8 | 0.008 | <0.001 | 0.145 | ||
| f = 16 | <0.001 | <0.001 | 0.002 | f = 16 | 0.001 | <0.001 | 0.003 | ||
| f = 32 | 0.007 | <0.001 | 0.070 | f = 32 | 0.005 | <0.001 | 0.114 | ||
| W-C | m | W-C*m | W-C | m | W-C*m | ||||
| FD | f = 1 | 0.011 | <0.001 | 0.010 | D | f = 1 | 0.329 | <0.001 | 0.044 |
| f = 2 | 0.006 | <0.001 | 0.000 | f = 2 | 0.938 | <0.001 | <0.001 | ||
| f = 4 | 0.001 | <0.001 | 0.170 | f = 4 | 0.049 | <0.001 | 0.020 | ||
| f = 8 | <0.001 | <0.001 | 0.062 | f = 8 | 0.006 | <0.001 | 0.178 | ||
| f = 16 | <0.001 | <0.001 | 0.002 | f = 16 | 0.001 | <0.001 | 0.004 | ||
| f = 32 | 0.005 | <0.001 | 0.006 | f = 32 | 0.005 | <0.001 | 0.010 |
| Main and Interaction Effects (p-Value) | |||
| Condition/Speed | Method | Interaction | |
| WO vs. WO-1.3 | 0.017 | <0.001 | <0.001 |
| WO vs. DT | 0.002 | <0.001 | 0.057 |
| Pairwise Comparisons (p-Value) | |||
| D vs. D-R | D vs. FD | FD vs. FD-R | |
| WO | 0.104 | <0.001 | 0.042 |
| WO-1.3 | <0.001 | <0.001 | <0.001 |
| DT | 0.981 | <0.001 | 1.000 |
| Method | WO vs. WO-1.3 | WO vs. DT | |
| D | <0.001 | 0.013 | |
| D-R | 0.001 | 0.006 | |
| FD | 0.701 | 0.001 | |
| FD-R | 0.225 | <0.001 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmadi, S.; Sepehri, N.; Wu, C.; Szturm, T. Sample Entropy of Human Gait Center of Pressure Displacement: A Systematic Methodological Analysis. Entropy 2018, 20, 579. https://doi.org/10.3390/e20080579
Ahmadi S, Sepehri N, Wu C, Szturm T. Sample Entropy of Human Gait Center of Pressure Displacement: A Systematic Methodological Analysis. Entropy. 2018; 20(8):579. https://doi.org/10.3390/e20080579
Chicago/Turabian StyleAhmadi, Samira, Nariman Sepehri, Christine Wu, and Tony Szturm. 2018. "Sample Entropy of Human Gait Center of Pressure Displacement: A Systematic Methodological Analysis" Entropy 20, no. 8: 579. https://doi.org/10.3390/e20080579
APA StyleAhmadi, S., Sepehri, N., Wu, C., & Szturm, T. (2018). Sample Entropy of Human Gait Center of Pressure Displacement: A Systematic Methodological Analysis. Entropy, 20(8), 579. https://doi.org/10.3390/e20080579