1. Introduction
With the development of Internet of Things (IoT) systems, a massive number of data are transmitted via wireless networks, which are very vulnerable to eavesdropping attacks due to the broadcast nature of the wireless medium. Information security has become a non-negligible issue in sixth-generation (6G) networks. Physical layer security (PLS) is a promising technique to enhance system security via exploiting the inherent characteristics of the wireless channel. The theoretical basis of PLS comes from Shannon’s information-theoretic secrecy research [
1]. Then, Wyner introduced the wiretap channel model and derived secrecy capacity in degraded broadcast channels [
2]. Afterwards, the idea of PLS was extended to non-degraded broadcast channels [
3], Gaussian channels [
4], multi-antenna channels [
5], and so on. Nowadays, various schemes, such as artificial noise (AN), beamforming, and cooperative relaying, have been utilized to improve the secrecy rate [
6]. However, these techniques increase the computational complexity and hardware cost, which have become challenging issues with a massive number of devices in 6G networks. Moreover, when the channel responses of the legitimate receivers and the eavesdroppers are highly correlated, traditional schemes also benefit eavesdroppers [
7].
Recently, intelligent surfaces have been proposed as a potential alternative technique for building an energy-efficient wireless networks [
8]. To be specific, an intelligent surface is a two-dimensional surface consisting of many low-cost, passive, reconfigurable elements. The intelligent surface consumes much less power than conventional antennas since these elements require no dedicated radio frequency (RF) chains or amplifiers [
9]. Each element of an intelligent surface can dynamically adjust the amplitude and/or phase of the incident electromagnetic (EM) wave, which enables the intelligent surface to actively customize wireless propagation environments [
10]. Moreover, intelligent surfaces can be flexibly deployed on building surfaces without introducing additional interference. Depending on the operation mode of the intelligent surface elements, an intelligent surfaces is mainly divided into two categories: an intelligent reflecting surface (IRS) and an intelligent transmission surface (ITS).
Many studies have been carried out to examine IRS-aided PLS. For instance, Ref. [
11] proposed a power-efficient beamforming scheme for IRS-aided multi-antenna secure transmission where a closed-form expression of the optimal beamformer is derived. In [
12], the achievable secrecy rate maximization problem of the IRS-aided multiuser (MU) system is alternatively optimized by a block coordinate decent (BCD) algorithm. An IRS-aided secrecy simultaneous wireless information and power transfer (SWIPT) network was considered in [
13], where a penalty dual decomposition (PDD)-based algorithm was proposed to solve a max–min fairness robust problem. Ref. [
14] focused on the secrecy performance of IRS-aided massive MIMO systems with statistical channel state information (CSI), where an approximate expression of the sum achievable security data rate was derived.
The above works mainly focus on adopting intelligent surfaces as auxiliary nodes. Actually, apart from being deployed as a passive reflector, intelligent surfaces can also be equipped at the base station (BS) serving as an antenna array. Without the requirement for a conventional RF combiner and phase shifter, intelligent surface-based transmitters consume significantly less power than conventional transmitters [
15]. Because of advantages including higher aperture efficiency, larger working bandwidth, and no feed occlusion or self-interference, the ITS-based transmitter is more promising than the IRS-based transmitter in complicated communication environments [
16]. In Ref. [
17], the author proposed an ITS-based transmitter in the MISO channel, where difference-of-convex (DC) programming was used to maximize the achievable sum-rate. Further, the authors of [
18] investigated the SWIPT networks with ITS-based transmitters, where a robust transmission scheme was proposed in the case of imperfect CSI. In Ref. [
19], a novel joint intelligent surface-assisted secure network was investigated for the first time, where PDD and element-wise Lagrange dual methods were utilized to design ITS beamforming vector and IRS phase shift.
It can be seen that existing studies primarily focused on the standalone use of intelligent surfaces as additional nodes or antenna arrays. Based on the above analysis, we consider secure transmission over multiple-input single-output multiple-eavesdropper (MISOME) channels where an ITS-aided transmitter and an IRS are jointly deployed to improve system secure performance. Specifically, we constructed a WSSR maximization problem by optimizing transmit power allocation, the ITS beamforming vector, and the IRS phase shift vector. Since the original problem is non-concave, we first use successive convex approximation (SCA) to approximate the object function by its linear lower bound. Then, we decompose the reformulated problem into three subproblems through the AO technique, where the transmit power allocation optimization subproblem is solved iteratively by using Karush–Kuhn–Tucker (KKT) conditions, and the optimization subproblem of ITS beamforming vector and IRS phase shift vector are solved by the ADMM and MM methods, respectively. The main contributions of this article are summarized as follows:
(1) We propose a novel intelligent surface-assisted MU-MISOME network architecture, where an ITS-aided transmitter sends a confidential signal to several legitimate users with the assistance of an IRS in the presence of multiple eavesdroppers. Specifically, the ITS reduces the power consumption and hardware cost of the transmitter by replacing power amplifiers and the RF chains. Moreover, the IRS is utilized to configure the radio propagation environment aiming for efficiently enlarging the channel difference between Bobs and Eves. Furthermore, we derived the WSSR to characterize the secure performance of the system.
(2) We propose an energy-efficient transmission scheme to maximize the WSSR by jointly designing transmit power allocation, ITS beamforming, and the IRS phase shift. As the objective function is non-concave and the optimization variables are highly coupled, we firstly transform the objective function into a more feasible concave form and solve it alternatively via the AO algorithm. Specifically, we derive the analytical solution for transmit power allocation by employing the KKT conditions, while the ITS beamforming and IRS phase shift are kept fixed. To solve the ITS beamforming and IRS phase shift optimization subproblem, the ADMM and MM methods are proposed.
(3) The simulation results validate the accuracy of our derived results and show the effectiveness of the proposed algorithms.
The rest of this paper is organized as follows. In
Section 2, we present a MU-MISOME downlink secure transmission network assisted by an ITS-based transmitter and IRS. In
Section 3, the WSSR maximization problem is reformulated and solved by an AO algorithm. Our theoretical analysis is verified by simulation results in
Section 4, and conclusions are drawn in
Section 5.
Notation: Column vectors and matrices are represented as boldface lower-case and upper-case letters, respectively. The transpose, conjugate, and conjugate transpose of are represented, respectively, as , , and . represents that is a Hermitian positive definite matrix. , , and denote the real part, the absolute value, and the angle of a complex value a, respectively. represents a circularly symmetric complex Gaussian (CSCG) random variable with zero mean and covariance . The letter j stands for the imaginary unit .
3. Problem Formulation and Solution for Wssr Maximization
In this work, our objective is to jointly optimize the power allocation
, the ITS transmission coefficient
, and the IRS phase shift
to maximize the WSSR of the system. Let
denote the weight for the
lth Bob, which is used to represent the priority of the
lth Bob in the system. Thus, the WSSR maximization problem can be generally formulated as
where
represents WSSR of the system; constraint (10b) defines the total transmit power constraint; and constraints (10c,d) characterize the constraints of the ITS beamforming and the phase shifts of the IRS, respectively. The proposed WSSR maximization problem (10) is challenging to solve directly, mainly because of the non-concave objective function as well as the coupling relation of the optimization variables. In order to tackle this, we first approximately reformulate the objective function (10a) into a tractable form by deriving its concave lower bound. Then, we decouple the optimization variables and decompose the transformed problem into three solvable subproblems by utilizing the alternating optimization (AO) technique, and each subproblem is efficiently solved via the iterative algorithm. Finally, we present the overall algorithm and analyze its convergence and complexity
3.1. Problem Transformation
To start with, let denote a given point in problem (10) at the tth iteration and introduce the following lemma.
Lemma 1 ([
21]).
For any u and , we havewhere are fixed points. Based on Lemma 1, we can find a lower bound of
and an upper bound of
around
, which can be expressed as
respectively, where
,
,
,
,
,
, and
.
By substituting (
12) and (
13) into (10a) and neglecting the constant terms, we transform the problem (10) into a tractable approximated form around the fixed point
as follows:
However, problem (14) is still difficult to solve directly due to the highly coupled optimization variables in (14a). In the following part, we use the AO technique to decompose problem (14) into three subproblems and alternately update
,
and
while keeping the other variables fixed.
3.2. Power Allocation Optimization
In this subsection, we consider the optimization of
with the given
and
. By omitting the irrelevant term, the WSSR maximization problem with respect to power allocation
is reformulated as follows:
where
Note that problem (15) is a quadratically constrained quadratic programming (QCQP), which can be solved by using a convex optimization solver, e.g., CVX [
22]. In order to further reduce computational complexity, we propose a more efficient method by solving KKT conditions. The KKT conditions of the problem (15) with respect to
are given as follows:
where
is the Lagrangian function and
is the Lagrangian multiplier associated with the constraint (10b). By solving (
17), we can derive power allocation
as
The optimal
can be calculated by solving the second KKT condition (18). We search
by considering the following two cases:
(1) If satisfies the power constraint, i.e., , then , and the optimum power allocation is obtained by .
(2) Otherwise, the full power constraint should be met. Given (19), we have . Since decreases monotonically with respect to , the optimal can be found efficiently by applying the bisection method. Moreover, since , we can set an upper searching bound on by letting ; thus, the search interval is .
The detailed steps for calculating
and
are summarized in Algorithm 1.
| Algorithm 1 Power Allocation Optimization |
1: Initialization: set the accuracy , and set the searching bounds and ;
2: Calculate according to (19). If , then , and terminate; otherwise, move to step 3;
3: Repeat
4: Calculate ;
5: Update via (19);
6: If set ; Otherwise, set end if;
7: Until ;
8: Output .
|
3.3. Optimization of ITS Beamforming
In this subsection, we attempt to optimize the ITS beamforming vector
with given
and
. With some manipulations, the problem (14) can be reformulated as follows:
where
and
.
and
are, respectively, denoted as
Problem (20) is a quadraitic programming problem that can be solved by using the CVX toolbox. Here, we propose a low-complexity algorithm where a closed-form solution is derived iteratively by using the ADMM method. First, let us reformulate problem (20) as follows:
where
is a slack variable. Then, the augmented Lagrange function of (20a) can be written as
where
is the Lagrange multiplier with respect to the constraint (22b) and
is the penalty factor. By using the ADMM method, we have the following iterations:
According to first-order optimality condition of (
23), we have
Then, the solution for (
24a) is derived as
Problem (24b) is equivalent to
, which is a projection problem, and the closed-form solution is given as
where
denotes the
nth element of
. Then, by exploiting (24c) and (
25), we obtain that
. The detailed step of the ADMM algorithm is stated in Algorithm 2, and it guarantees to converge when the value of the penalty parameter
satisfies:
[
23].
| Algorithm 2 The ADMM algorithm for problem (20) |
1: Initialization: set the maximum iteration number K; the accuracy ; a feasible point ; and the penalty factor , which satisfies ;
2: Repeat k
3: Update according to (26);
4: Update according to (27);
6: Update ;
7: Until or ;
8: Output .
|
3.4. Optimization of IRS Phase Shift
In this subsection, we aim to optimize the IRS phase shift
with given
and
. We first recast the problem (14) as follows:
where
,
,
and
are denoted by
The unit modulus constraint (10d) makes the problem difficult to solve. Although the semidefinite relaxation (SDR) method can be used to solve it, it is time consuming [
11]. We provide two efficient algorithms to tackle this problem. We start by introducing the MM method first.
(1) The MM method: the main idea behind the MM method is to transform the problem (28) into a series of tractable approximated subproblems [
24]. Generally, the MM method contains two steps. In the majorization step, we construct a surrogate function that upperbounds the objective function of (28) up to a constant. Let us denote the objective function of (28) as
. According to the second order Taylor expansion of
at a fixed point
, we obtain the following inequality:
where
is the maximum eigenvalue of matrix
. By taking the unit modulus constraint
into consideration, we have
. Then, Equation (
30) can be transformed as
where
is the surrogate function of
at point
. In the minimization step, we derive the corresponding solution by minimizing
and solve problem (28) iteratively. By omitting the constants, the subproblem of minimizing
at the
kth iteration can be rewritten as
where
. It is easy to see that the problem (32) has a closed-form solution, which is derived as
According to the principle of the MM method, the proposed MM algorithm is described in Algorithm 3.
| Algorithm 3 The MM algorithm for problem (28) |
1: Initialization: set the accuracy , the maximum iteration number K, and a feasible point ;
2: Repeat k
3: Calculate ;
4: Update according to (33);
5: Until or ;
6: Output .
|
(2) The ADMM method: Note that problem (28) has a similar structure to problem (22) except for the modulus constraint
. Therefore, after making some modifications to (
27), we obtain the following expressions:
where
,
, and
are corresponding auxiliary variables related to
. A closed-form solution of problem (28) can be obtained by adopting the ADMM method as described in Algorithm 2 in the preceding section, which is omitted here for brevity.
Lastly, the WSSR maximization problem (10) was decomposed into three solvable subproblems that were solved iteratively by corresponding methodsṪhe proposed AO algorithm is summarized in Algorithm 4.
| Algorithm 4 The proposed AO algorithm for the WSSR maximization problem |
1: Initialization: set the maximum iteration number K, the accuracy , and a feasible point ;
2: Repeat k
3: Obtain via solving (15) with fixed ;
4: Obtain via solving (20) using the ADMM method with fixed ;
5: Obtain via solving (28) using the ADMM or MM method with fixed ;
6: Until or ;
7: Output .
|
3.5. Complexity Analysis
In this part, we analyze the computational complexity of the proposed algorithms. We first denote the iteration number of the ADMM, MM, and AO algorithms as
,
, and
, respectively. Specifically, the complexity of the proposed ADMM method mainly lies in updating
, the complexity of which is
, where
and and
, respectively, denote the complexity for calculating
and other multiplication operations in updating
. We note that the inverse matrix
is calculated only once during the whole algorithm. Therefore, the total complexity of the ADMM method is
[
25]. Similar to the ADMM algorithm, the complexity of the MM algorithm mainly lies in two parts. At the beginning of the MM algorithm, calculating
incurs
computational complexity. In each iteration of the MM algorithm, the main complexity comes from updating
, the complexity of which is
. Thus, the complexity of the MM algorithm is
[
26]. It can be observed that the complexity of the ADMM and MM methods mainly depends on the iteration times, which is typically several hundreds of seconds. Lastly, the overall complexity of the proposed AO algorithm is
.
4. Simulation Results
In this section, we evaluate the performance of our proposed algorithms by numerical simulation results. The simulation scenario for the coordinates (in meters) is illustrated in
Figure 2, where Alice and the IRS are located at (0, 0) and (100, 0), respectively.
L Bobs are randomly scattered in a circle centered at (100, 20) with a radius of 5 m. Each Bob is eavesdropped by one Eve, which randomly located within a circle centered at the Bob with radius 2 m. The heights of Alice, IRS, Bobs, and Eves are set as 20 m, 10 m, 1.5 m and 1.5 m, respectively. The large-scale path loss is modeled as
dB, where
is the path-loss at the reference distance and
d is the link distance in meters. The path loss exponents for the Alice-Bobs/Eves link, the Alice-IRS link, and the IRS–Bobs/Eves link are set as
,
and
, respectively. Other parameters, unless otherwise specified, are set as follows:
,
,
,
,
, and Ricean factor
.
We first study the convergence behaviors of the proposed algorithm with different numbers of transmissive element
N and reflective element
M.
Figure 3 shows the convergence properties of ADMM and MM algorithms for optimizing the phase shift of IRS in the first AO iteration. It can be observed that the WSSR achieved by both methods increases with the iteration number. Although the ADMM method converges a little more slowly than the MM method, they both tend to converge within 200 iterations, which verifies the convergence of the two methods.
The convergence performance of the AO algorithm is shown in
Figure 4 for different
N and
M. It is clear that the AO algorithm tends to converge within 15 iterations for all
N and
M combinations considered, which demonstrates the convergence of the suggested AO algorithms. Moreover, the increase in
N or
M leads to higher WSSR but slower convergence performance, which is because large
N or
M indicates more variables that need to be optimized. Also, given the same
N and
M combinations, the AO-MM and AO-ADMM algorithms have a similar convergence speed, but the WSSR obtained by the AO-MM method is higher than that of the AO-ADMM method.
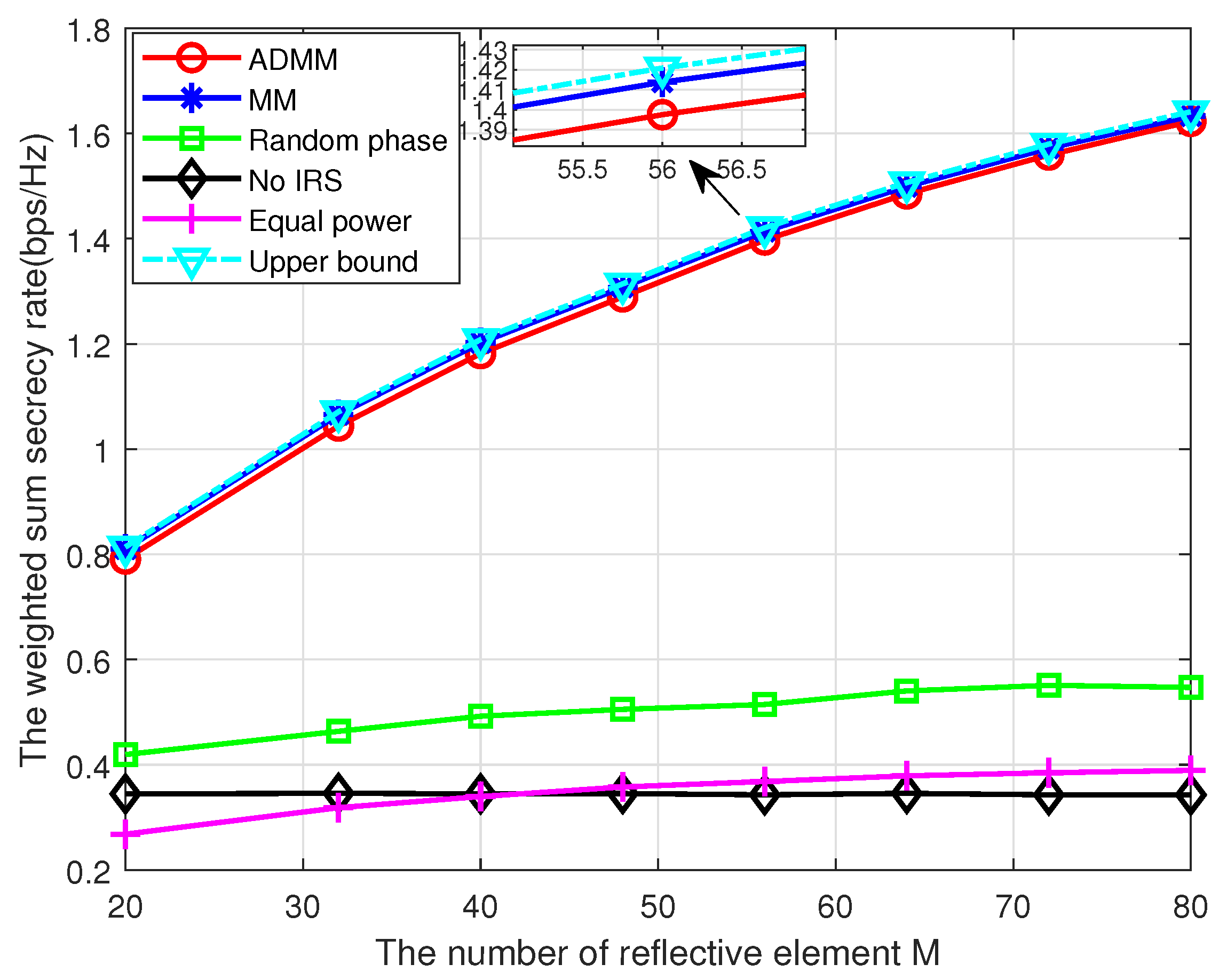
Next, we evaluate the performance of the proposed algorithm and contrast it with the benchmark methodologies shown below: (1) Random IRS: Only and are optimized, and the phase for each IRS reflective components is generated uniformly and independently over . (2) No IRS: Replace the IRS-related channel matrices by zero matrices and remove step 5 from Algorithm 4. (3) Equal power: Allocate the same power to each Bob, i.e., set . (4) The upper bound: Obtaining the optimal value of power allocation, ITS beamforming, and IRS phase shift numerically by using CVX toolbox. Specifically, and are obtained by directly solving problem (15) and (20) as QCQP and QP, respectively. is obtained by solving problem (28) via applying the SDR method and Gaussian randomization techniques.
Figure 5 compares the WSSR performance versus the transmit power
of all schemes. We can see that the WSSR increases with
. Moreover, both ADMM and MM algorithms achieve near-optimal performance compared to the upper bound and also significantly outperform other schemes, demonstrating the performance of our proposed transmission strategy. Further, the random phase scheme outperforms the no IRS scheme, which verifies the benefits of utilizing IRS. Lastly, the equal power scheme achieves the worst performance when
, which can be explained by the fact that the inter-user interference becomes the primary performance constraint in the high transmit power region.
Then, we study the impact of the number of IRS reflective elements
M on the WSSR of a different scheme in
Figure 6. We can see that the WSSR experiences a great increase with
M for both ADMM and MM schemes, which indicates that increasing the number of IRS elements can improve the WSSR effectively. By contrast, the WSSR of the random phase scheme is significantly lower that of the ADMM or MM schemes, which verifies the advantage of our proposed algorithm. Moreover, the WSSR of random phase scheme is higher than that of the no IRS case, and the gap only increases slightly with
M, which is due to the fact that more signals can be reflected by IRS with larger
M and these additional signals can enhance secrecy performance only if the phase shifter been properly designed.
Next, we investigate the system performance with a different number of Bobs/Eves
L, as shown in
Figure 7. As we can see, the WSSR declines with
L, which is because the inter-user interference increases with
L and the weight
1/L for each Bobs decreases with
L. As a result, the WSSR tends to decrease.
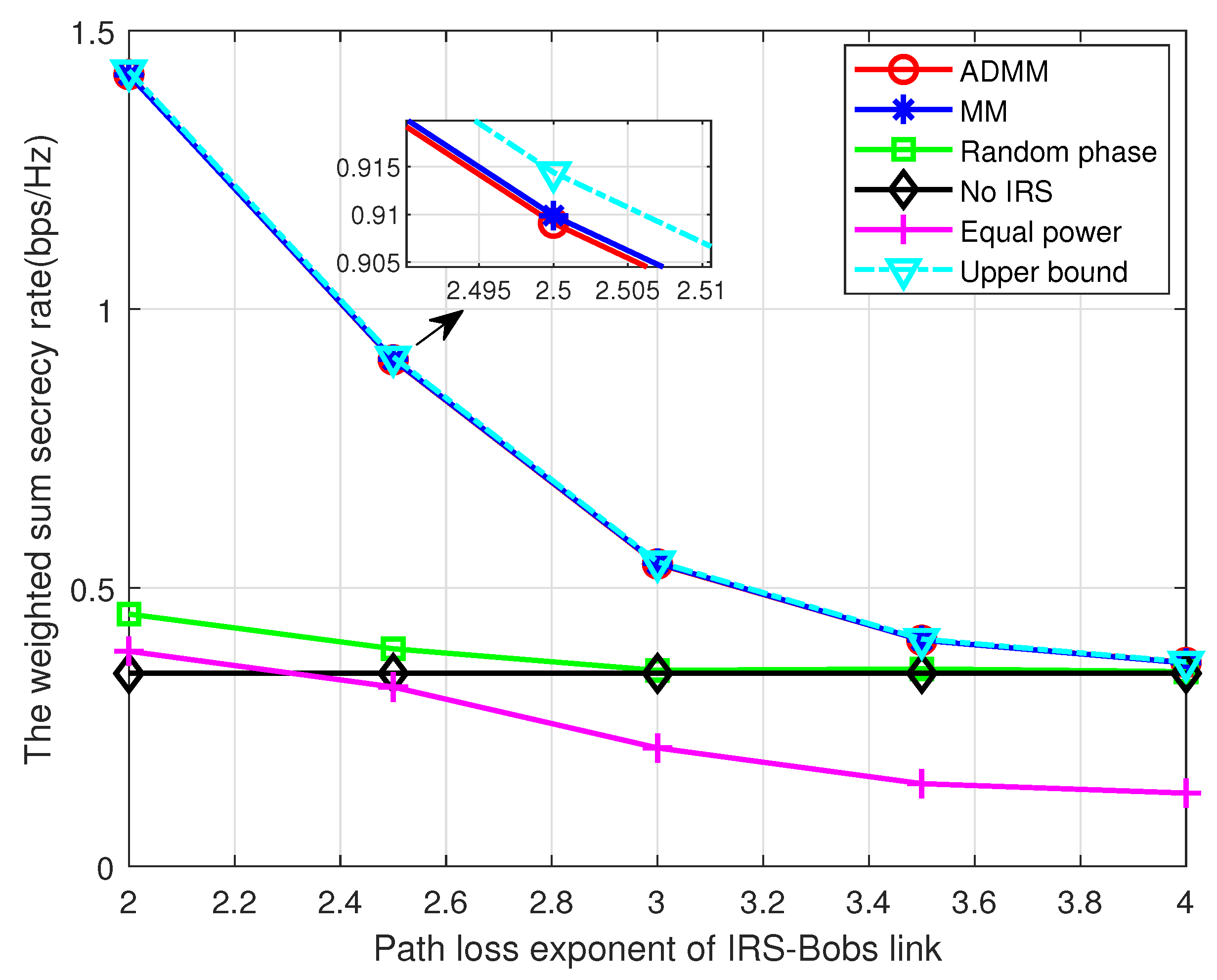
Lastly, we discuss the relationship between system performance and path loss exponent. As
Figure 8 shows, the WSSR of the proposed algorithms decreases dramatically with the increase in the path loss exponent of the IRS–Bobs link. This is mainly because more severe path loss will decrease the power of the reflected signal from the IRS, which jeopardizes the system performance. Meanwhile, the increase in the path loss exponent of the IRS–Eves link improves the WSSR as depicted in
Figure 9, which is due to the fact that more severe large-scale fading degrades the reflected signal at Eve. These two figures demonstrate a technical insight that, in order to achieve a better performance, the IRS should be carefully installed so that there are fewer obstructions in the legitimate link or more obstructions in the eavesdropping link.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}