
An LPV Adaptive Observer for Updating a Map Applied to an MAF Sensor in a Diesel Engine

Abstract
:1. Introduction
2. Problem Formulation
2.1. A Diesel Engine Air Path LPV Model


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ETC | FTP75 | NEDC |
|---|---|---|---|
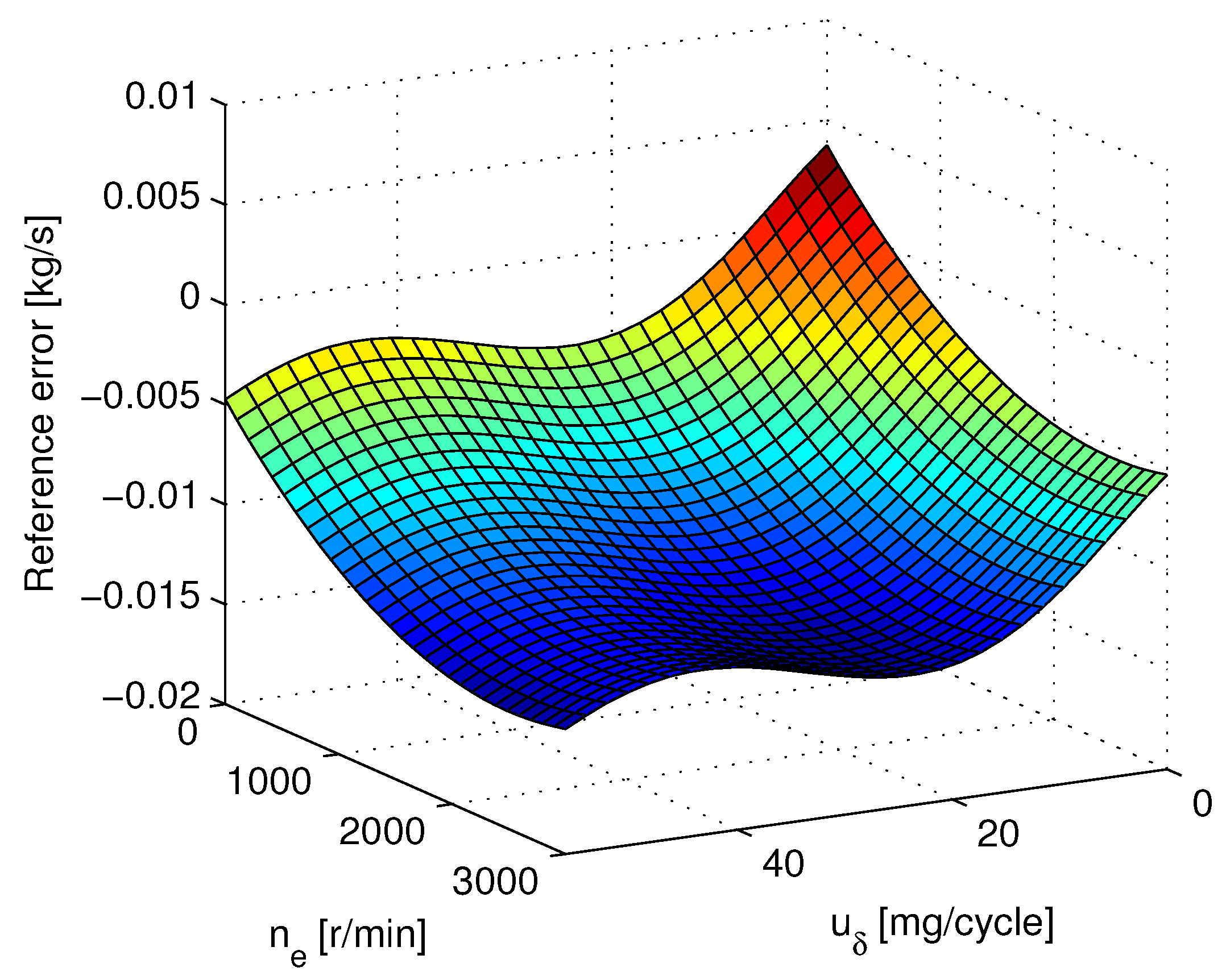
2.2. 2D Map Description for the MAF Sensor Error
3. Adaptive Observer Design
4. Simulation Results


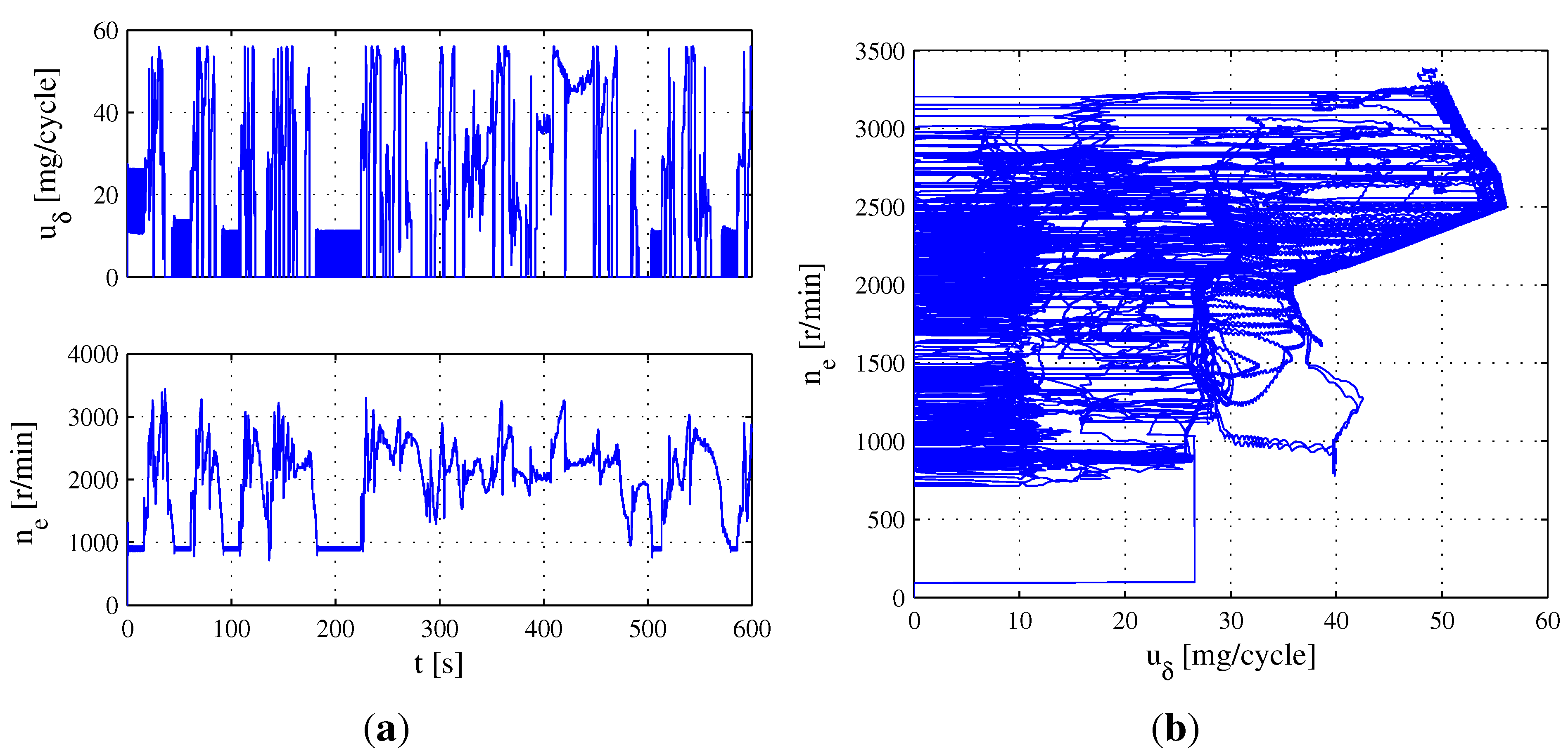
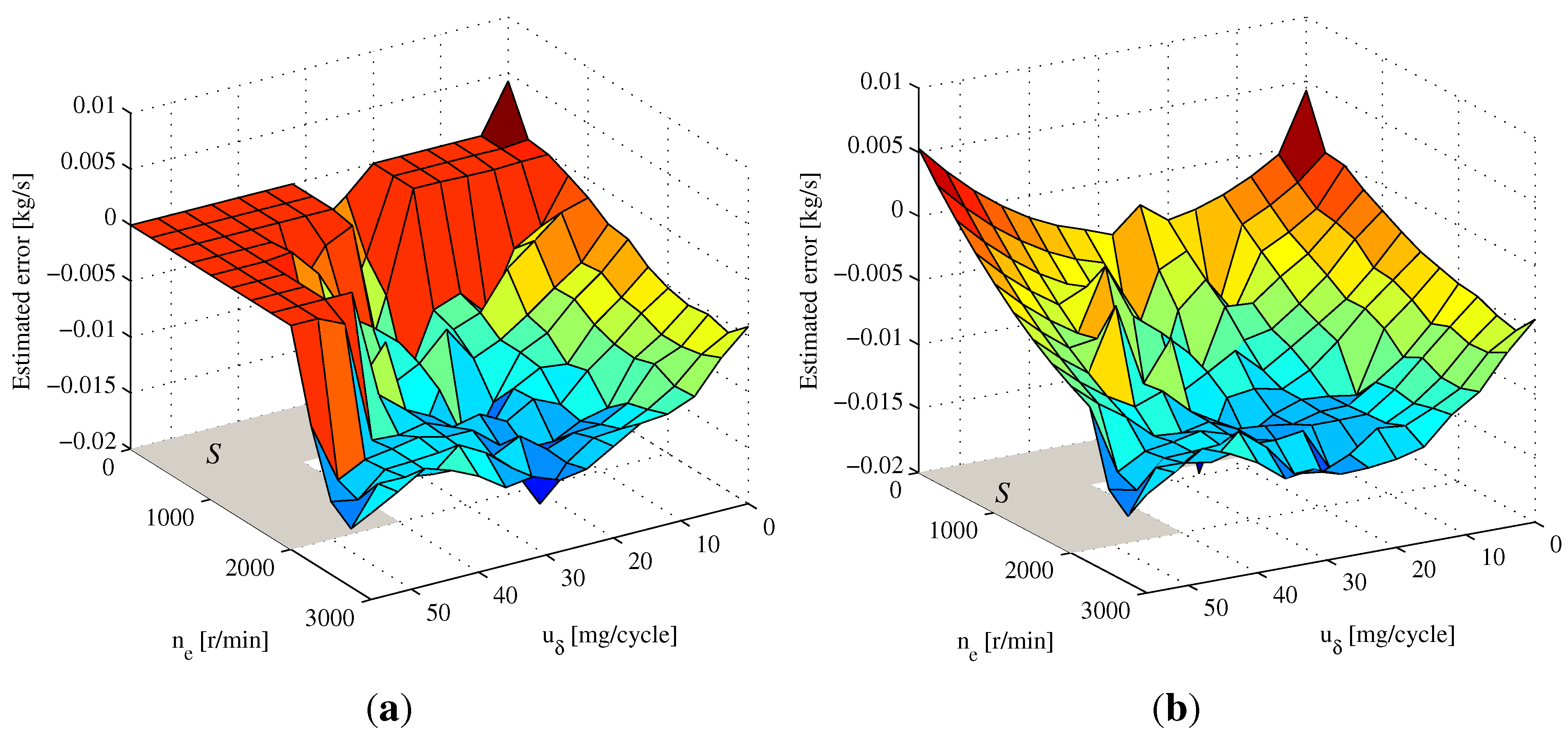
4.1. 2D Map Estimation under ETC



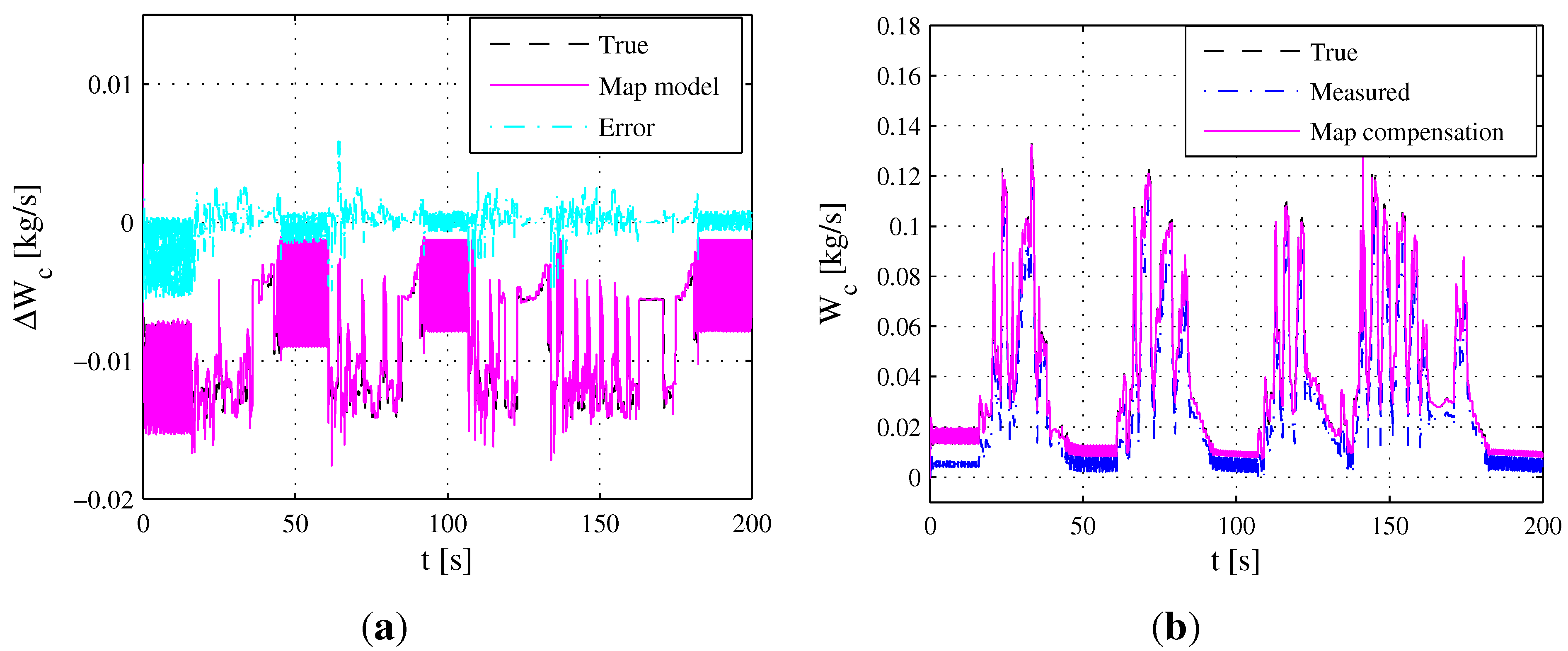
4.2. 2D Map Estimation under FTP75



5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| ambient pressure (Pa) | intake manifold pressure (Pa) | ||
| exhaust manifold pressure (Pa) | turbine speed (rad/s) | ||
| engine speed (rpm) | compressor mass air flow (kg/s) | ||
| EGR mass flow (kg/s) | cylinder mass flow (kg/s) | ||
| fuel rate injected to cylinder (kg/s) | turbine mass flow (kg/s) | ||
| compressor power (W) | turbine power (W) | ||
| volumetric flow coefficient | energy transfer coefficient | ||
| volumetric efficiency | turbine efficiency | ||
| turbocharger mechanical efficiency | compressor efficiency | ||
| ambient temperature (K) | intake manifold temperature (K) | ||
| exhaust manifold temperature (K) | intake manifold volume (m) | ||
| exhaust manifold volume (m) | displaced volume (m) | ||
| air gas constant (J/(kg·K)) | exhaust gas constant (J/(kg·K)) | ||
| compressor blade radius (m) | air specific heat capacity ratio | ||
| exhaust specific heat capacity ratio | compressor pressure quotient | ||
| turbine pressure quotient | turbine inertia (kg·m) | ||
| number of cylinders | EGR valve effective area (m) | ||
| VGT nozzle maximum effective area (m) | choking function | ||
| effective area ratio function | EGR valve opening percentage (%) | ||
| VGT vane opening percentage (%) | injected amount of fuel (mg/cycle) | ||
| air specific heat capacity at constant pressure (J/(kg·K)) | |||
| exhaust specific heat capacity at constant pressure (J/(kg·K)) |
References and Notes
- Zheng, M.; Reader, G.T.; Hawley, J.G. Diesel engine exhaust gas recirculation—A review on advanced and novel concepts. Energy Convers. Manag. 2004, 45, 883–900. [Google Scholar] [CrossRef]
- Höckerdal, E.; Eriksson, L.; Frisk, E. Air mass-flow measurement and estimation in diesel engines equipped with EGR and VGT. Int. J. Passeng. Cars-Electron. Electr. Syst. 2008, 1, 393–402. [Google Scholar] [CrossRef]
- Fleming, W. Overview of automotive sensors. IEEE Sens. J. 2001, 1, 296–308. [Google Scholar] [CrossRef]
- Bosch. HFM2-Air Mass Meter; Gerlingen, Germany, 2009. [Google Scholar]
- Hourdakis, E.; Sarafis, P.; Nassiopoulou, A.G. Novel air flow meter for an automobile engine using a Si sensor with porous Si thermal isolation. Sensors 2012, 12, 14838–14850. [Google Scholar] [CrossRef] [PubMed]
- Betta, G.; Capriglione, D.; Pietrosanto, A.; Sommella, P. ANN-based sensor fault accommodation techniques. In Proceedings of the 2011 IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics & Drives (SDEMPED), Bologna, Italy, 5–8 September 2011; pp. 517–524.
- Zhao, J.; Wang, J. Engine mass airflow sensor fault detection via an adaptive oxygen fraction observer. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; pp. 1517–1522.
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and Fuzzy Models; Springer Science & Business Media: New York, NY, USA, 2001. [Google Scholar]
- Höckerdal, E.; Frisk, E.; Eriksson, L.; Scania, C. Model based engine map adaptation using EKF. In Proceedings of the 6th IFAC Symposium on Advances in Automotive Control, Munich, Germany, 12–14 July 2010; pp. 697–702.
- Höckerdal, E.; Frisk, E.; Eriksson, L. EKF-based adaptation of look-up tables with an air mass-flow sensor application. Control Eng. Pract. 2011, 19, 442–453. [Google Scholar] [CrossRef]
- Höckerdal, E.; Eriksson, L.; Frisk, E. Off-and on-Line Identification of Maps Applied to the Gas Path in Diesel Engines. In Identification for Automotive Systems; Springer: London, UK, 2012; pp. 241–256. [Google Scholar]
- Zhang, Q.; Clavel, A. Adaptive observer with exponential forgetting factor for linear time varying systems. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; pp. 3886–3891.
- Zhang, Q. Adaptive observer for multiple-input-multiple-output (MIMO) linear time-varying systems. IEEE Trans. Autom. Control 2002, 47, 525–529. [Google Scholar] [CrossRef]
- Zhang, Q. An adaptive observer for sensor fault estimation in linear time varying systems. In Proceedings of the IFAC World Congress, Prague, Czech Republic, 4–8 July 2005; pp. 1824–1824.
- Zhang, Q.; Besancon, G. An adaptive observer for sensor fault estimation in a class of uniformly observable non-linear systems. Int. J. Model. Identif. Control 2008, 4, 37–43. [Google Scholar] [CrossRef]
- Wahlström, J.; Eriksson, L. Modelling diesel engines with a variable-geometry turbocharger and exhaust gas recirculation by optimization of model parameters for capturing non-linear system dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2011, 225, 960–986. [Google Scholar] [CrossRef]
- TESIS DYNAware. en-DYNA® THERMOS® 2.0 Block Reference Manual. 27 June 2006. [Google Scholar]
- TESIS DYNAware. en-DYNA® THERMOS® 2.0 User Manual. 27 June 2006. [Google Scholar]
- Council of European Parliament. Directive 2005/55/EC of the European Parliament and of the Council of 28 September 2005. OJL 275. 2005. [Google Scholar]
- Protection of the Environment. Code of Federal Regulations, Part 86, Subpart N, Title 40. USA, 1999.
- Directive, EEC. Emission Test Cycles for the Certification of Light Duty Vehicles in Europe, EEC Directive 90/C81/01; EEC Emission Cycles, 2009.
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Gahinet, P.; Apkarian, P.; Chilali, M. Affine parameter-dependent Lyapunov functions and real parametric uncertainty. IEEE Trans. Autom. Control 1996, 41, 436–442. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Wang, C. An LPV Adaptive Observer for Updating a Map Applied to an MAF Sensor in a Diesel Engine. Sensors 2015, 15, 27142-27159. https://doi.org/10.3390/s151027142
Liu Z, Wang C. An LPV Adaptive Observer for Updating a Map Applied to an MAF Sensor in a Diesel Engine. Sensors. 2015; 15(10):27142-27159. https://doi.org/10.3390/s151027142
Chicago/Turabian StyleLiu, Zhiyuan, and Changhui Wang. 2015. "An LPV Adaptive Observer for Updating a Map Applied to an MAF Sensor in a Diesel Engine" Sensors 15, no. 10: 27142-27159. https://doi.org/10.3390/s151027142
APA StyleLiu, Z., & Wang, C. (2015). An LPV Adaptive Observer for Updating a Map Applied to an MAF Sensor in a Diesel Engine. Sensors, 15(10), 27142-27159. https://doi.org/10.3390/s151027142