
Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation


Abstract
:1. Introduction
2. Experimental Design
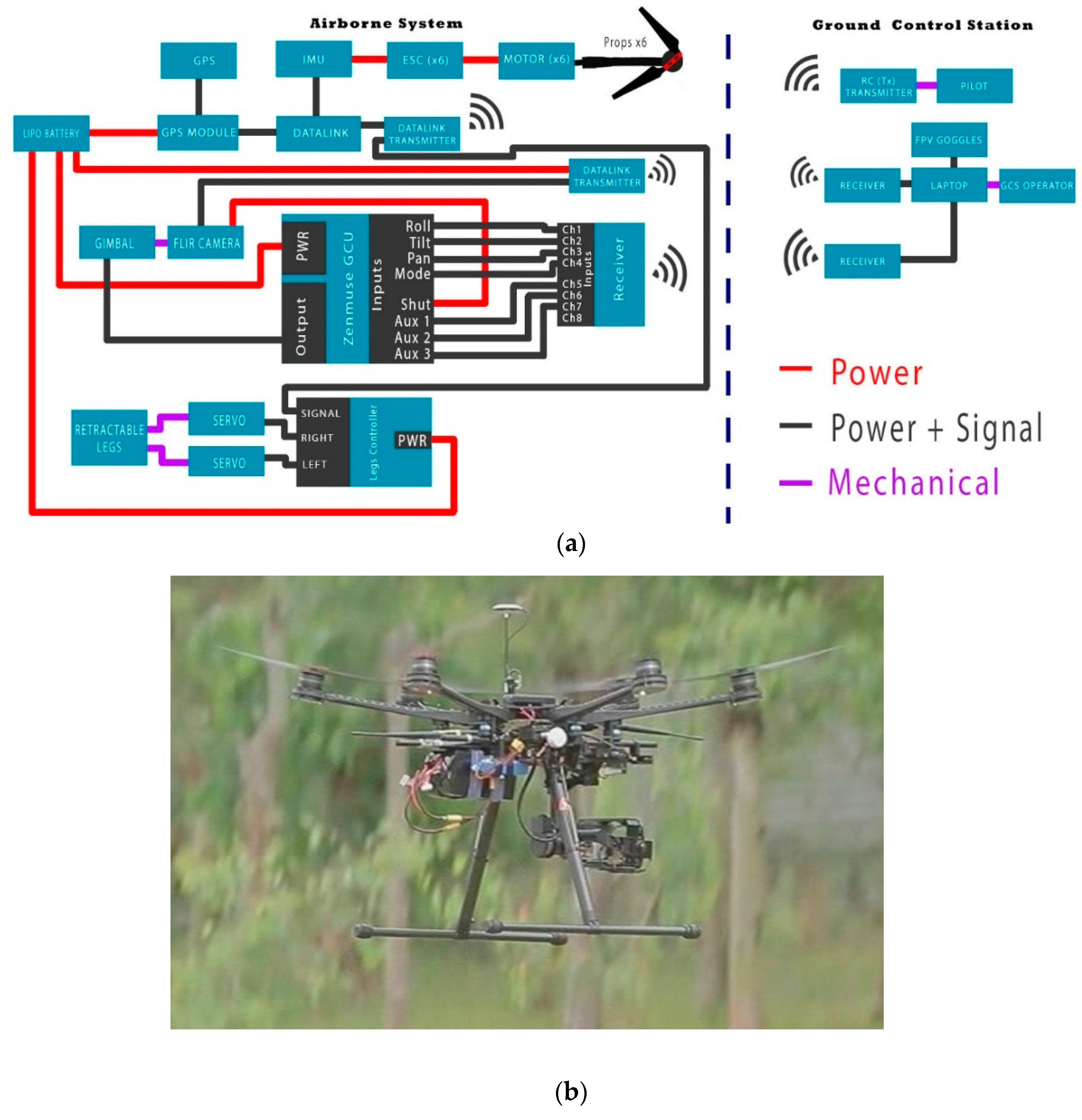
2.1. System Architecture
2.1.1. Unmanned Aerial Vehicle (UAV)
Airframe

Power and Propulsion
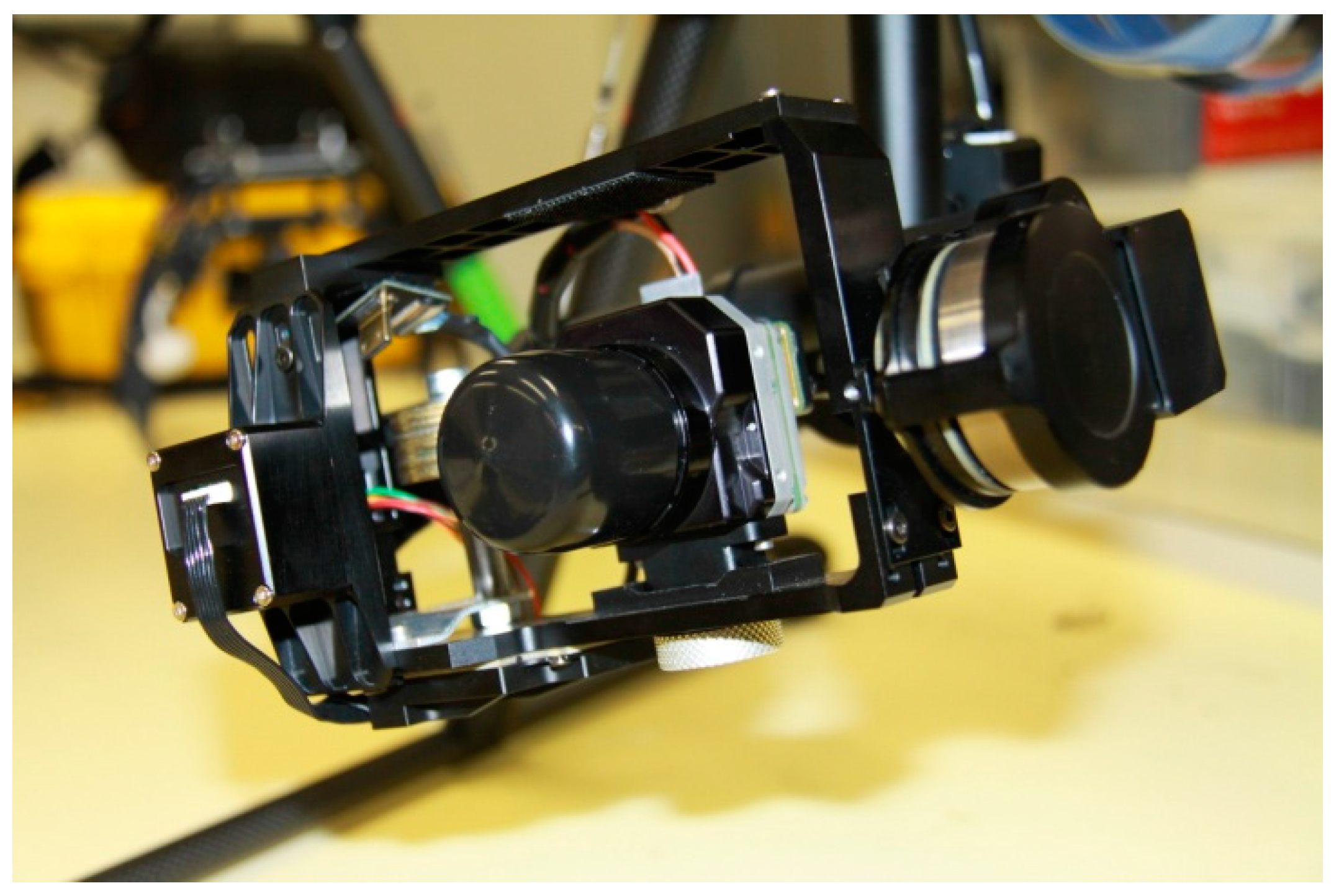
FLIR Camera, Gimbal System and Video Transmission

Ground Control Station and Datalink
Remote Display for Visualization

2.2. Algorithms for Counting and Tracking
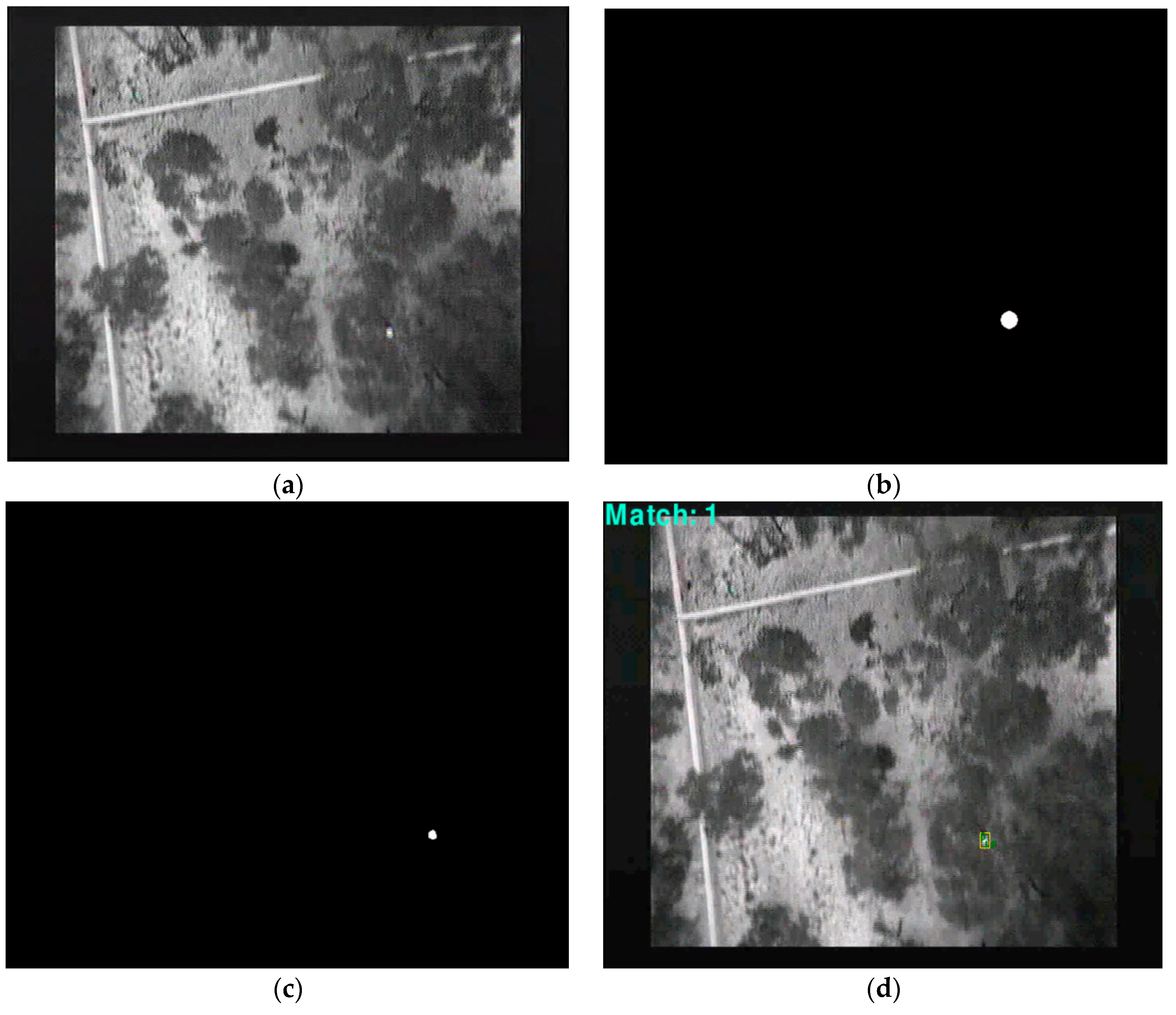
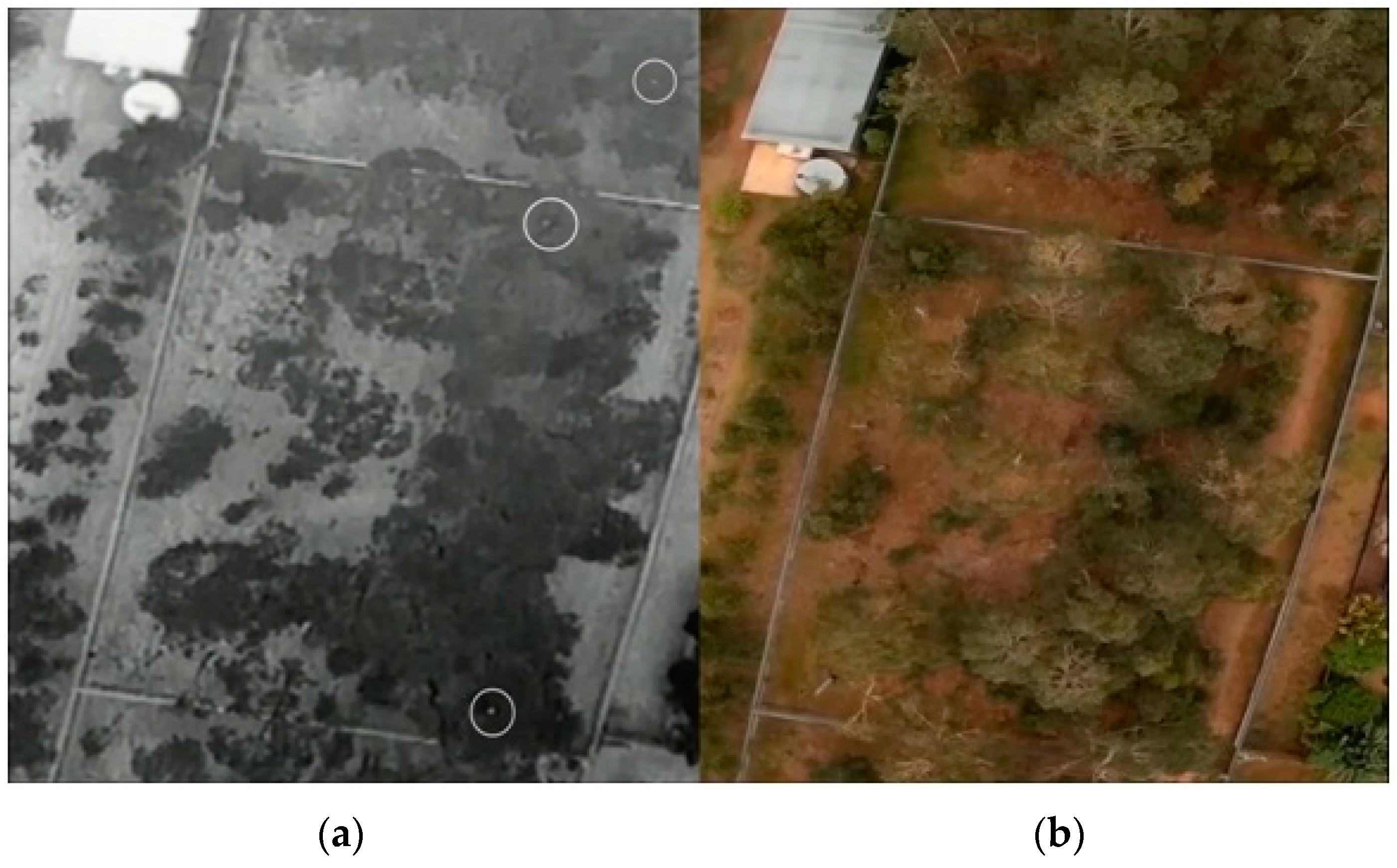
2.2.1. Algorithm 1: Pixel Intensity Threshold (PIT)






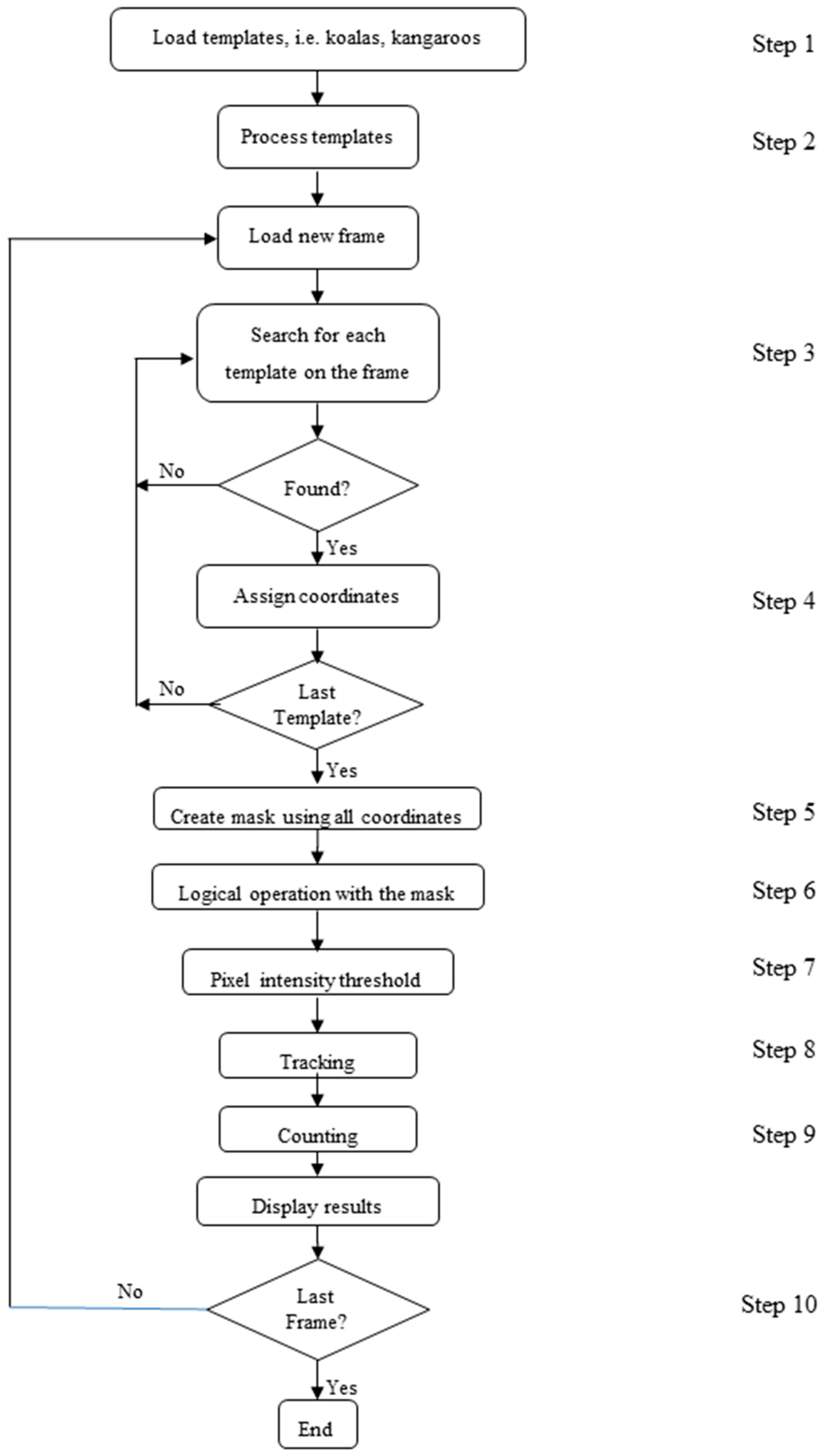
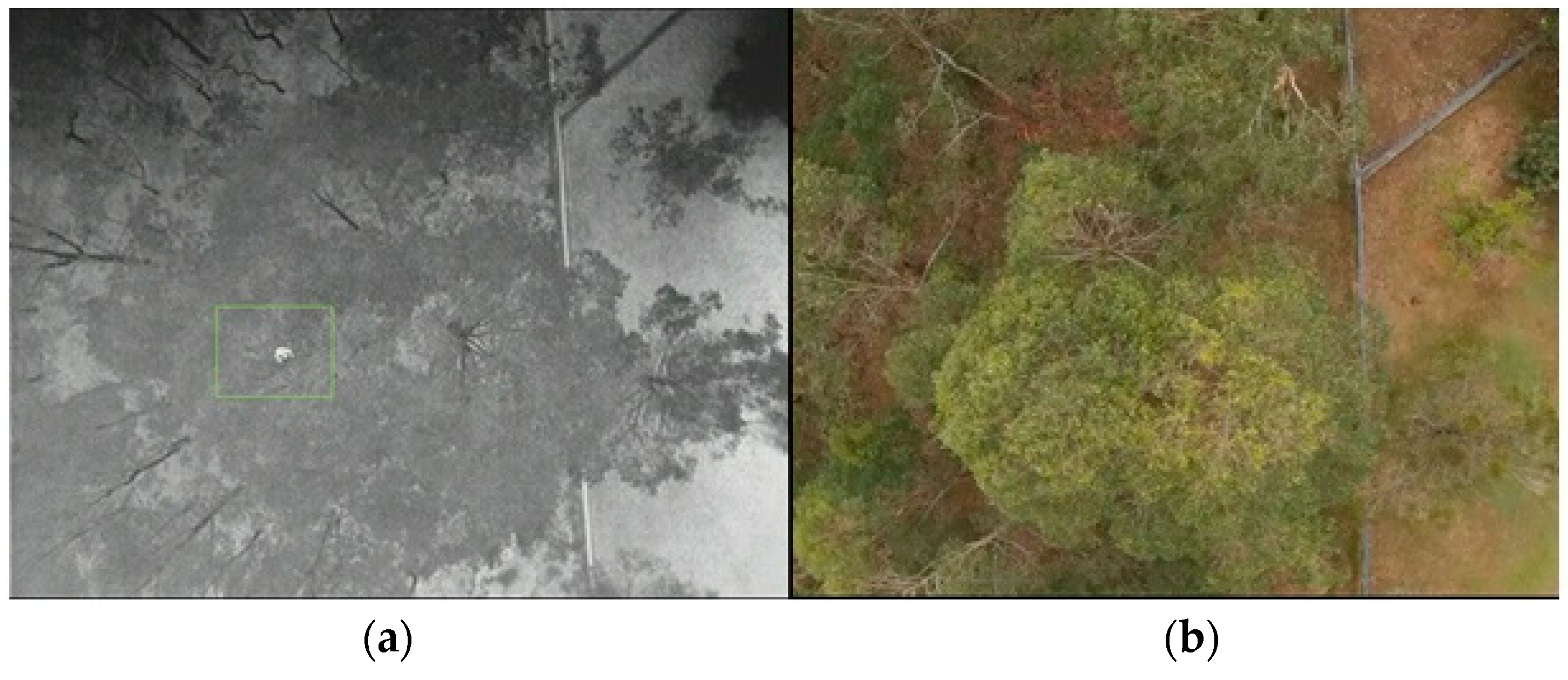
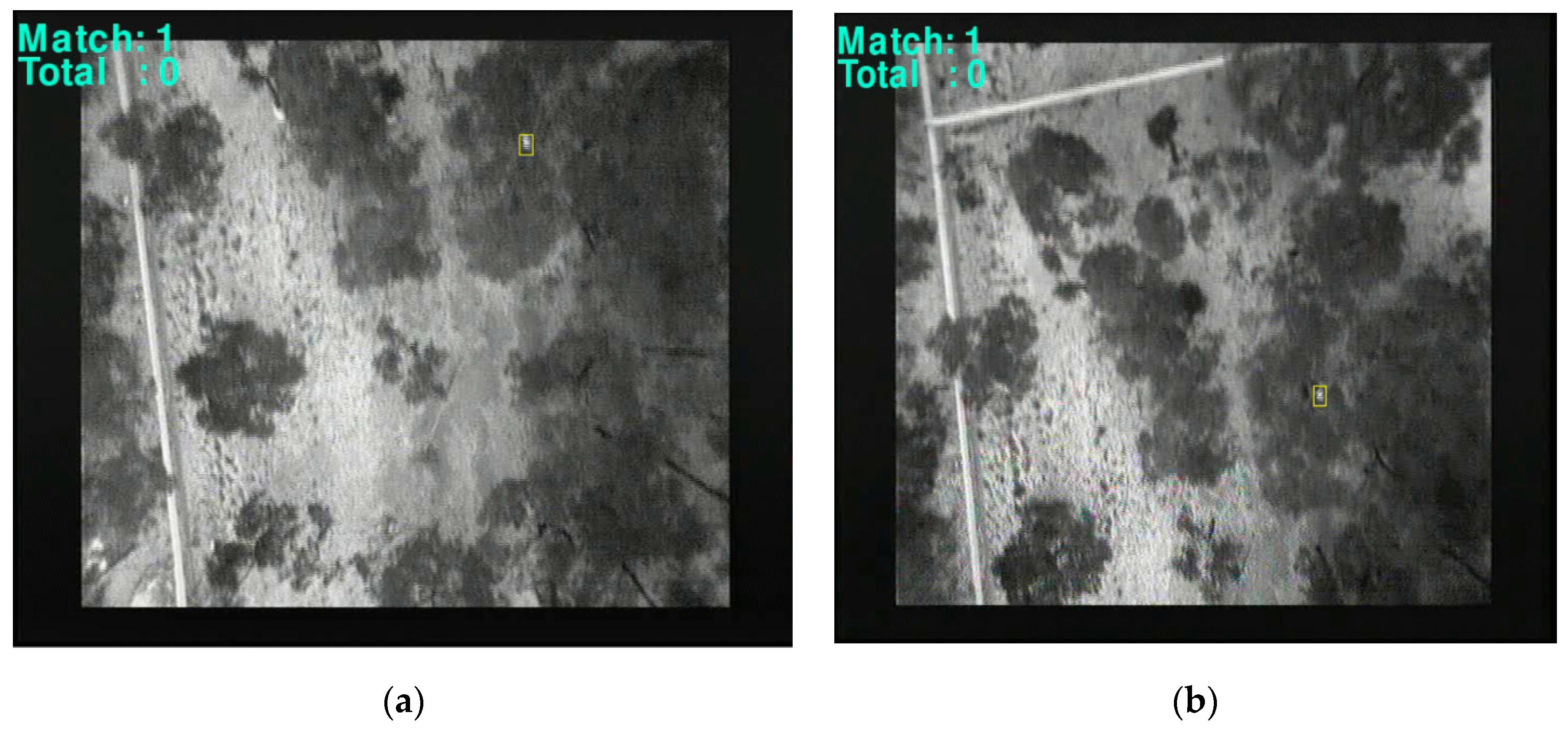
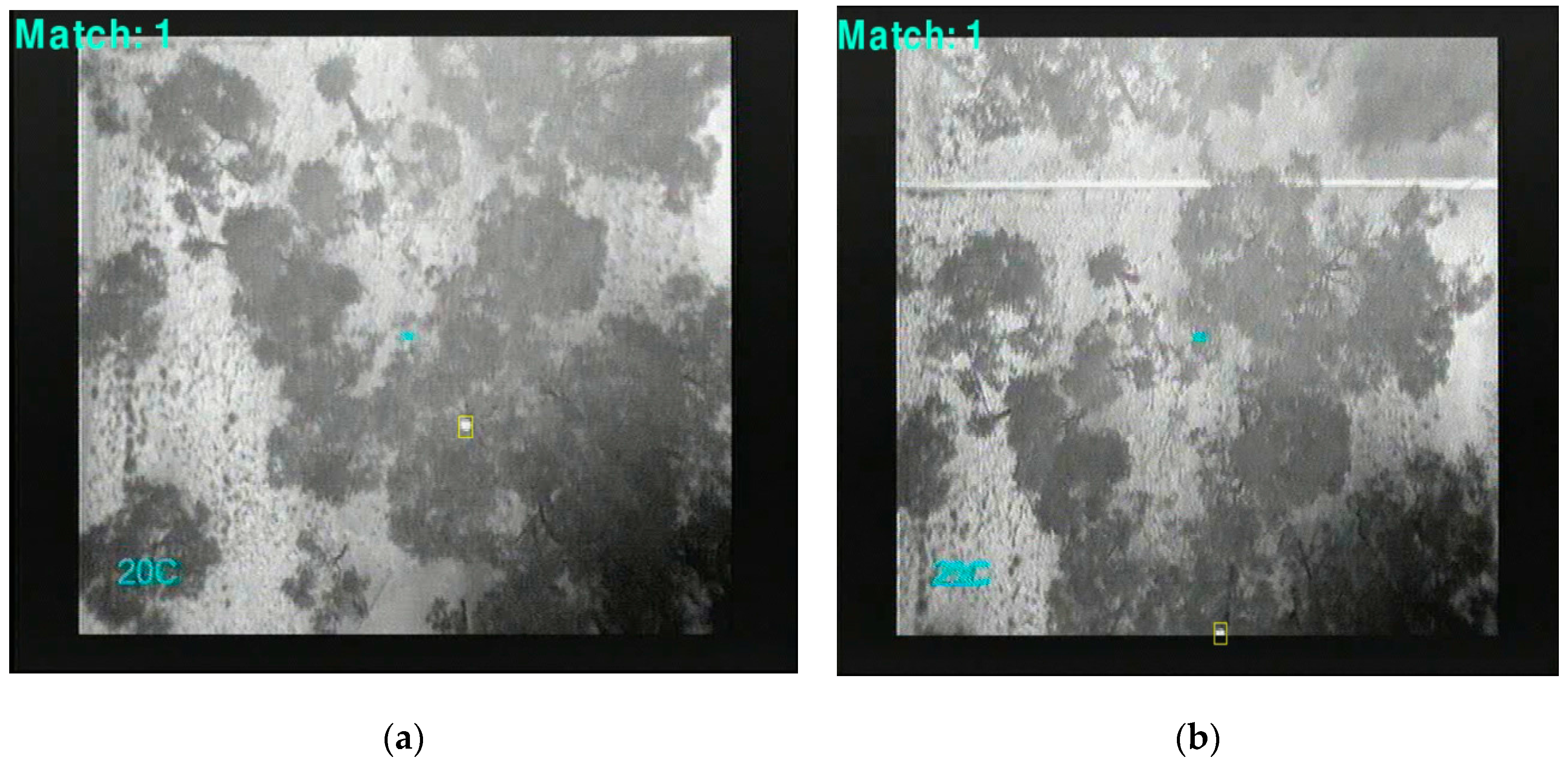
2.2.2. Algorithm 2: Template Matching Binary Mask (TMBM)
- Load templates: In this first step template images are selected (e.g., koala, kangaroo, deer, pigs or birds). The templates are taken from the original footage or a database of images and then saved as small images of the object of interest. The algorithm is able to search for multiple templates in each frame.
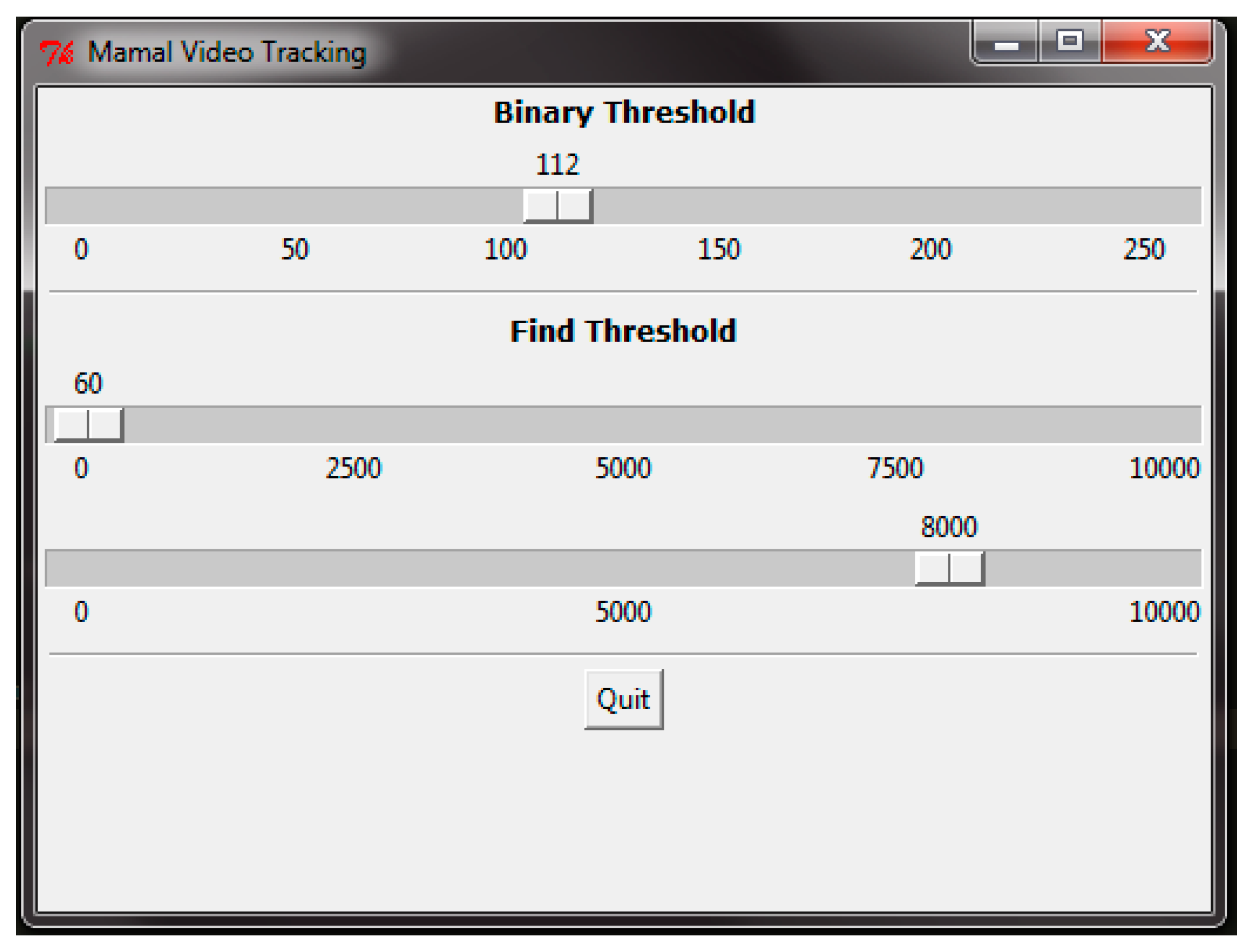
- Processes Templates: The contrast of the template is increased in order to enhance the possibility of finding this template in the footage; white is made lighter and black darker by adding or subtracting a constant, C, from each pixel value, p, depending on a threshold, T.The values of T and C may be changed in the program code, depending on the template quality and animal size, and can be determined by experimenting with different cases.
- Search for each template in the video frame: For a detected animal to be recorded as a match it must be able to pass a scoring threshold. The searching function returns a score from 1 to 10, based on the proximity of the template to the matched object, where 1 indicates the smallest chance of finding the target and 10 indicates a perfect match. A score of 7 was designed to reflect a high quality match that gave an acceptable chance of avoiding false positives. In addition, to avoid false positives, any match found has to be present for at least 10 consecutive frames before it is considered to be a true match.
- Assign coordinates: once a match has been found, the pixel coordinates (x, y) of the location within the frame are stored for later use.
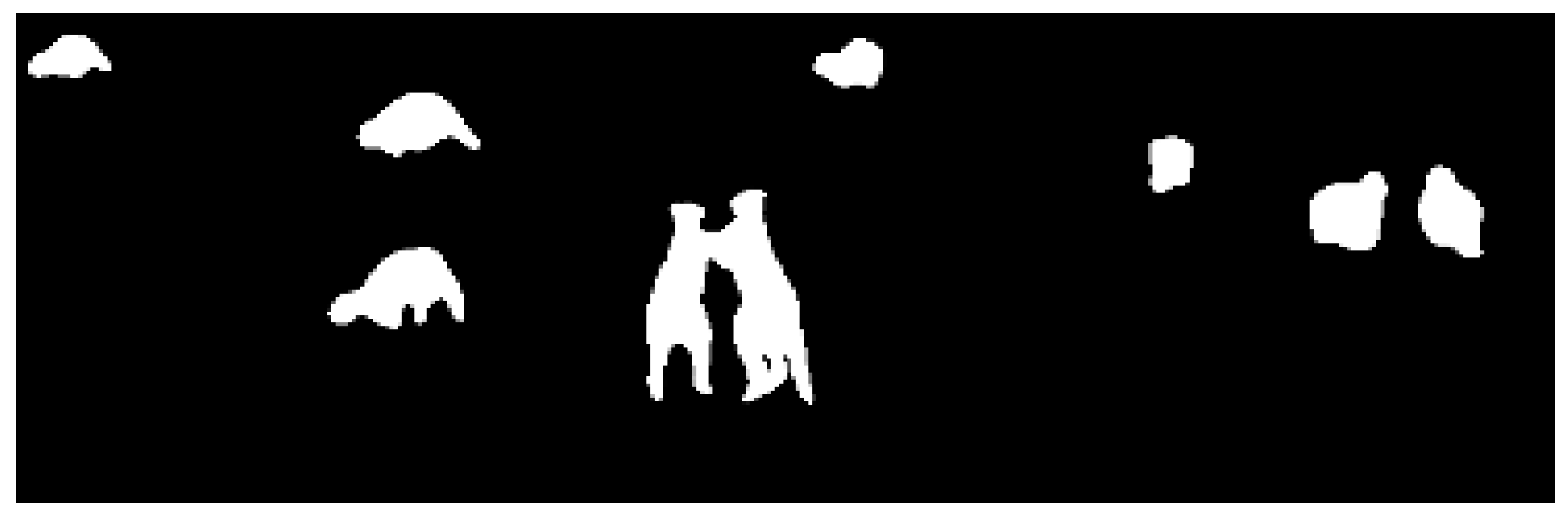
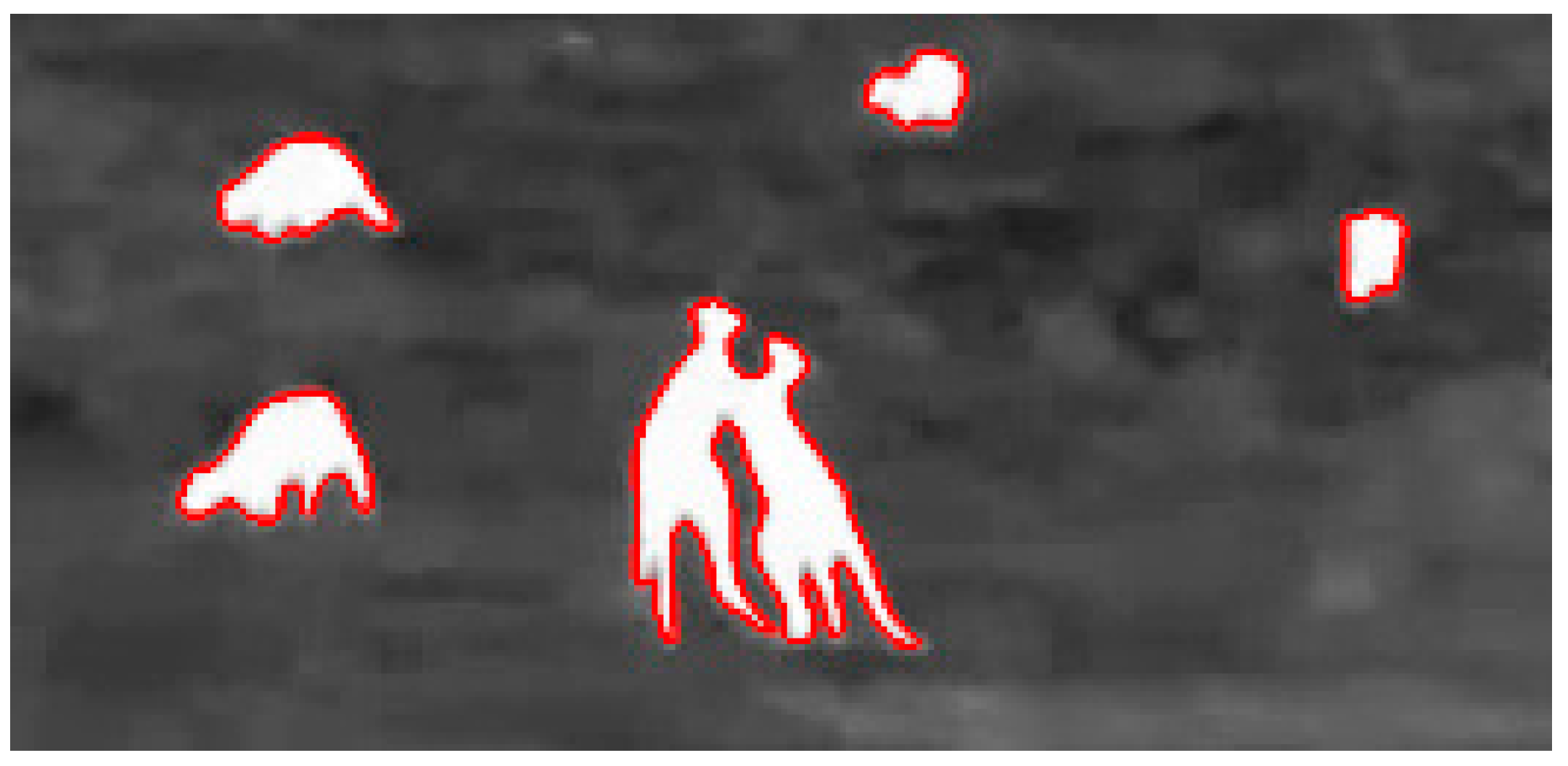
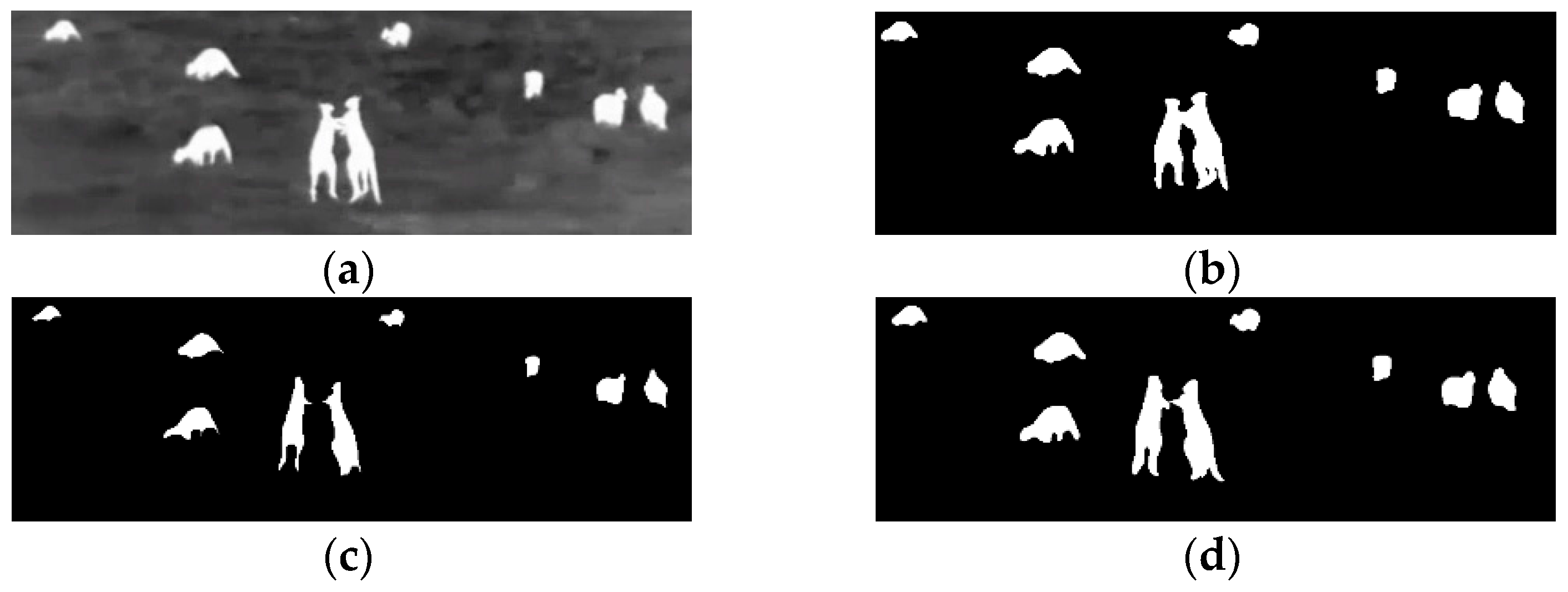
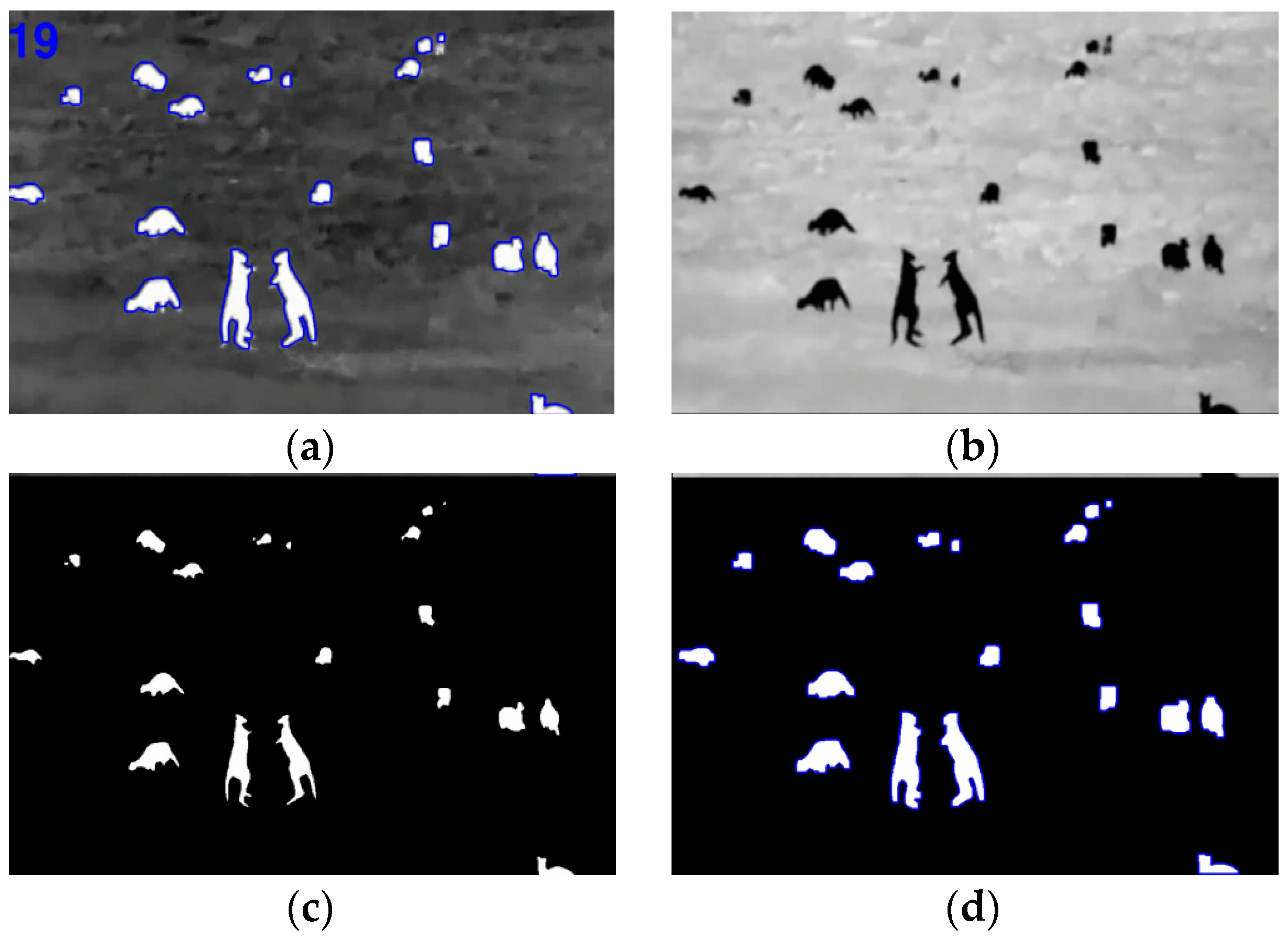
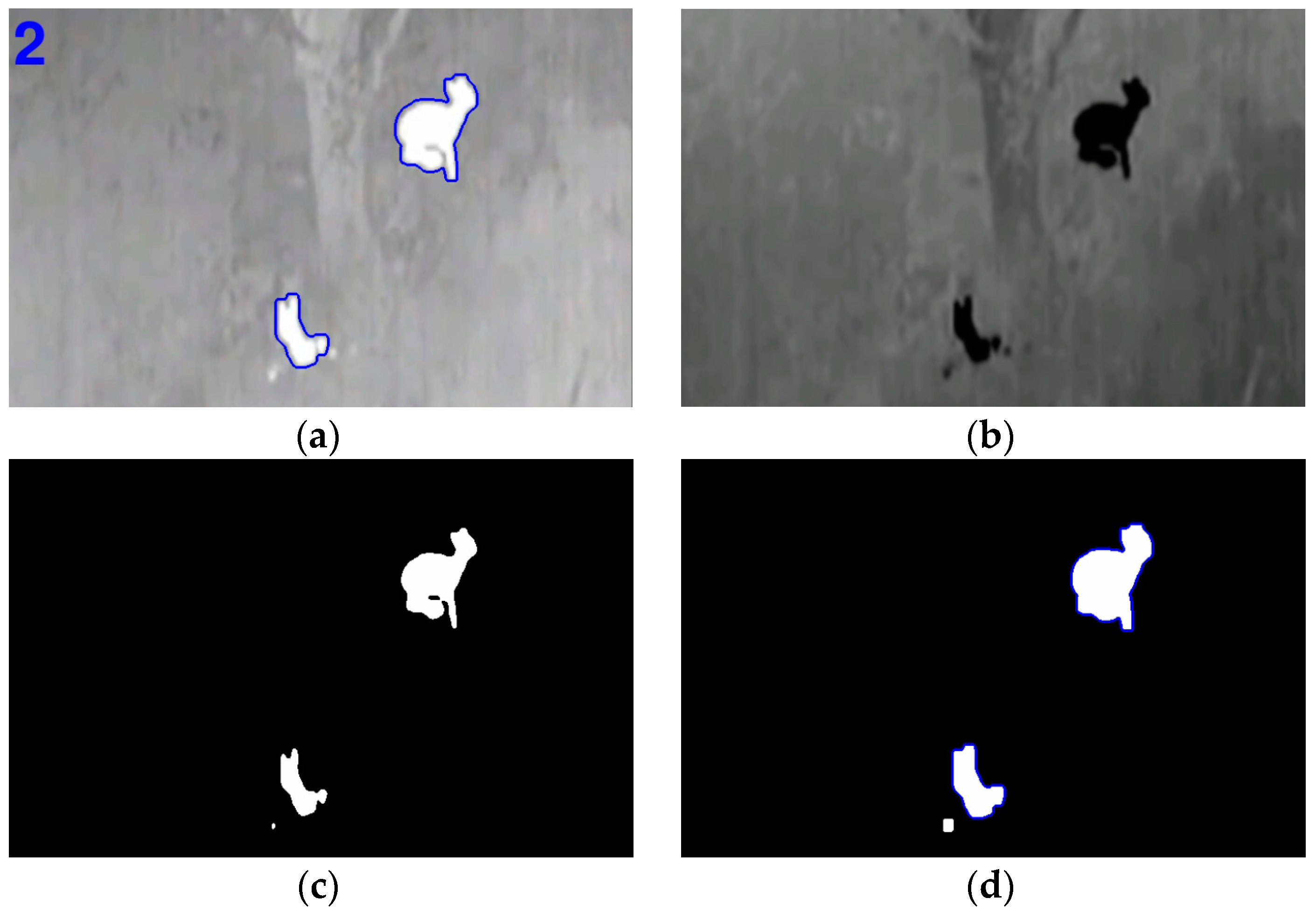
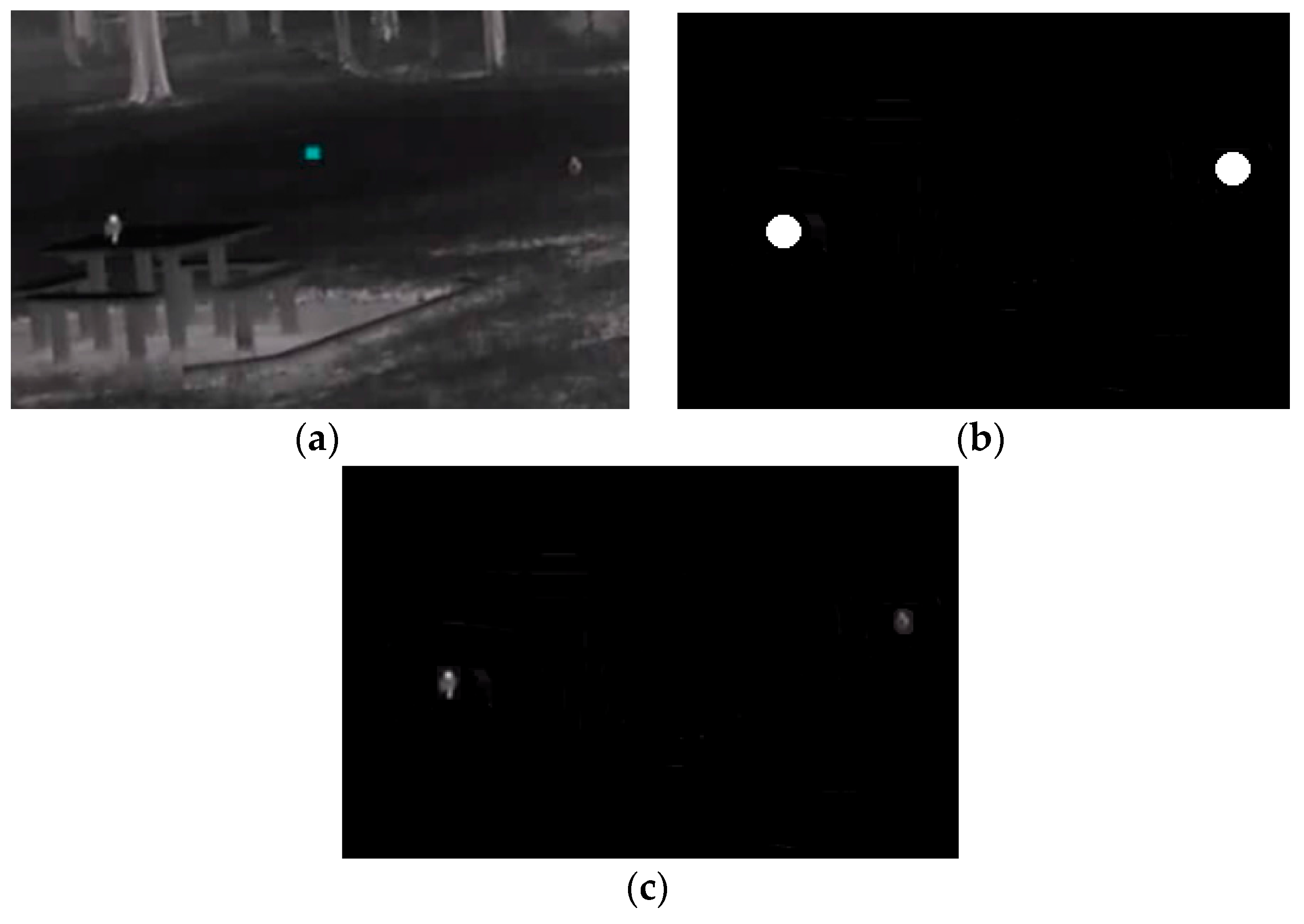
- Create a mask using coordinates: A new image is created with the same dimension as the source footage with a black (pixel with a value of 0) background. Using the coordinates within the image of the match found in the previous step, a white (pixel with a value of 255) bounding box or circle is drawn with a variable area (Figure 11b). The size of this area is defined by calculating the area of the match. The mask image aims to reduce the search area, eliminating what is considered as background.
- Logical operation with the mask: In this step a logical AND is applied using the current frame and the mask. As a result the background is eliminated leaving only the regions of interest at the front.
- Pixel intensity threshold: In this step the function described in Step 2 is used to assign a 0 if the pixel value is less than or equal to the threshold and 255 otherwise.
- Tracking: After obtaining an image comprising only the objects, a function to track is implemented. This function is capable of identifying multiple objects within the same frame and can also distinguish one from another by using their coordinates. The coordinates of the current objects are compared to the previous mask obtained, therefore making it possible to recognize if an object of interest has moved.
- Counting: This function is able to number, count and display matches in the current frame and throughout the video. This is established by using the object’s coordinates within the frame to differentiate multiples objects and to count the number of consecutive frames in which those objects have appeared. If this number increases, it means the object is still in the frame and this is counted as a match. If the object leaves the scene for a specified number of frames after being identified as a match, it is included in the total count.
- Last frame Loop: In this last step the algorithm then checks if the current frame is the last. If not the algorithm restarts at Step 3; otherwise the process ends.


3. Validation Test
3.1. Focal Species: Koala
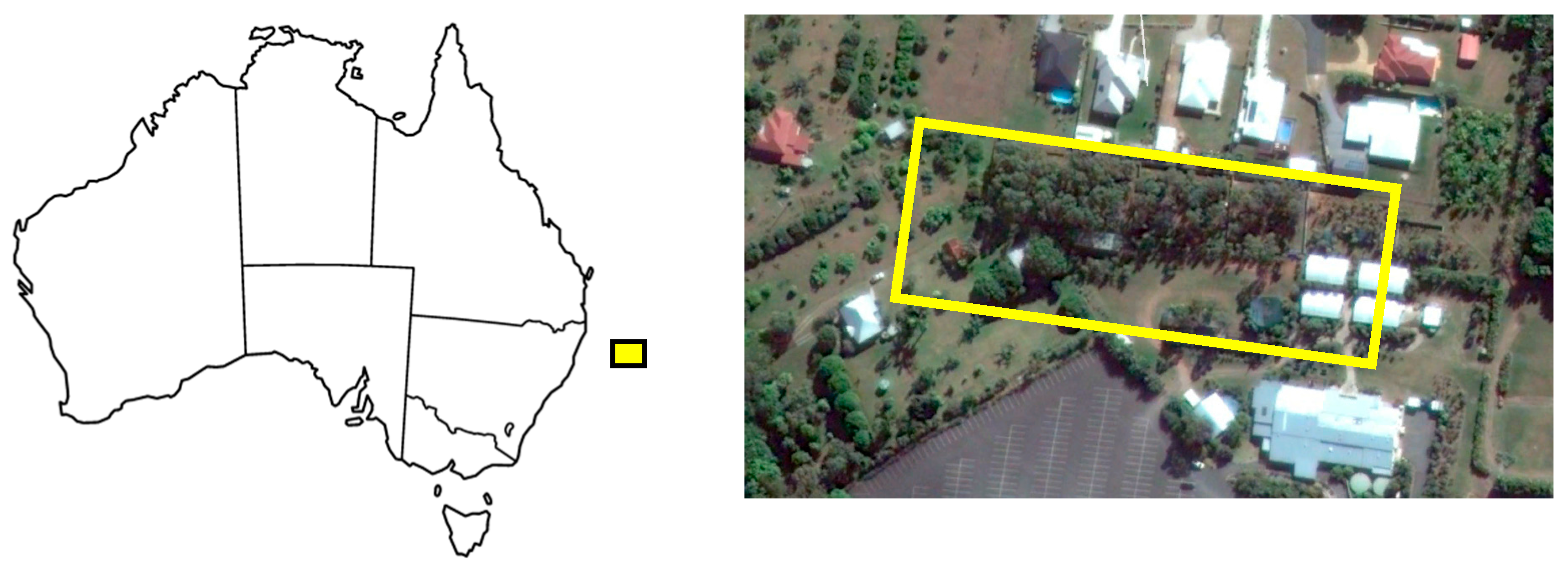
3.2. Study Area

3.3. Data Acquisition


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mobius RGB Camera | FLIR Thermal Camera | |
|---|---|---|
| Size | 61 mm × 35 mm × 18 mm | 44.5 mm × 44.5 mm × 55 mm |
| Weight | 38 g | 72 g |
| Spectrum Wavelength | Visible RGB | 7.5 -13.5 µm |
| Resolution | 1080 p | 640 × 510 |
| Focal Length | 2.1 mm | 25 mm |
| Frame Rate | 30 fps | 9 fps |


4. Results and Discussion

- If the target wildlife (e.g., koala) is found in at least 10 consecutive frames it is counted as a match
- The target wildlife (e.g., koala) that has been identified cannot make big jumps in location (coordinates) between consecutive frames.
- A horizontal displacement of the target wildlife (e.g., koala) is expected to be within the circle surrounding the target in the mask
- The size of the target wildlife (e.g., koala) cannot suddenly increase drastically (area in pixels).
- If the target wildlife (e.g., koala) being tracked is not found for 10 consecutive frames it is considered lost or out of the frame.




| Altitude | Number of Detections | Actual Number of Koalas | Average Detection Time (s) | Average False Positives |
|---|---|---|---|---|
| 20 m | 6 | 6 | 1.3 | 0 |
| 30 m | 6 | 6 | 1.6 | 0 |
| 60 m | 5 to 6 | 6 | 2.1 | 1.5 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cristescu, R.H.; Foley, E.; Markula, A.; Jackson, G.; Jones, D.; Frère, C. Accuracy and efficiency of detection dogs: A powerful new tool for koala conservation and management. Sci. Rep. 2015, 1, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Burton, A.C.; Neilson, E.; Moreira, D.; Ladle, A.; Steenweg, R.; Fisher, J.T.; Bayne, E.; Boutin, S. Wildlife camera trapping: A review and recommendations for linking surveys to ecological processes. J. Appl. Ecol. 2015, 52, 675–685. [Google Scholar] [CrossRef]
- Witmer, G.W. Wildlife population monitoring: Some practical considerations. Wildl. Res. 2005, 32, 259–263. [Google Scholar] [CrossRef]
- Christiansen, P.; Steen, K.A.; Jørgensen, R.N.; Karstoft, H. Automated detection and recognition of wildlife using thermal cameras. Sensors 2014, 14, 13778–13793. [Google Scholar] [CrossRef] [PubMed]
- Gaston, K.J.; Fuller, R.A. The sizes of species’ geographic ranges. J. Appl. Ecol. 2009, 46, 1–9. [Google Scholar] [CrossRef]
- Murray, J.V.; Low Choy, S.; McAlpine, C.A.; Possingham, H.P.; Goldizen, A.W. The importance of ecological scale for wildlife conservation in naturally fragmented environments: A case study of the brush-tailed rock-wallaby (petrogale penicillata). Biol. Conserv. 2008, 141, 7–22. [Google Scholar] [CrossRef]
- Schaub, M.; Gimenez, O.; Sierro, A.; Arlettaz, R. Use of integrated modeling to enhance estimates of population dynamics obtained from limited data. Conserv. Biol. 2007, 21, 945–955. [Google Scholar] [CrossRef] [PubMed]
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears show a Physiological but Limited Behavioral Response to Unmanned Aerial Vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar]
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UAS) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Barasona, J.Á.; Acevedo, P.; Vicente, J.; Negro, J.J. Unmanned aircraft systems complement biologging in spatial ecology studies. Ecol. Evol. 2015. [Google Scholar] [CrossRef] [PubMed]
- Soriano, P.; Caballero, F.; Ollero, A. RF-based particle filter localization for wildlife tracking by using an UAV. In Proceedings of the 40th International Symposium on Robotics, Barcelona, Spain, 10–13 March 2009; pp. 239–244.
- Van Gemert, J.C.; Verschoor, C.R.; Mettes, P.; Epema, K.; Koh, L.P.; Wich, S.A. Nature conservation drones for automatic localization and counting of animals. In Computer Vision—ECCV 2014 Workshops, Part I; Agapito, L., Bronstein, M.M., Rother, C., Eds.; Springer: Cham, Switzerland, 2015; pp. 255–270. [Google Scholar]
- Williams, B.P.; Clothier, R.; Fulton, N.; Johnson, S.; Lin, X.; Cox, K. Building the safety case for uas operations in support of natural disaster response. In Proceedings of the 14th Aiaa Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014.
- Cork, L.; Clothier, R.; Gonzalez, L.F.; Walker, R. The future of UAS: Standards, regulations, and operational experiences [workshop report]. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 29–44. [Google Scholar] [CrossRef] [Green Version]
- Vincent, J.B.; Werden, L.K.; Ditmer, M.A. Barriers to adding UAVs to the ecologist’s toolbox. Front. Ecol. Environ. 2015, 13, 74–75. [Google Scholar] [CrossRef]
- Bevan, E.; Wibbels, T.; Najera, B.M.Z.; Martinez, M.A.C.; Martinez, L.A.S.; Martinez, F.I.; Cuevas, J.M.; Anderson, T.; Bonka, A.; Hernandez, M.H.; et al. Unmanned aerial vehicles (UAVs) for monitoring sea turtles in near-shore waters. Mar. Turt. Newsl. 2015, 19–22. [Google Scholar]
- Vermeulen, C.; Lejeune, P.; Lisein, J.; Sawadogo, P.; Bouché, P. Unmanned aerial survey of elephants. PLoS ONE 2013, 8. [Google Scholar] [CrossRef] [PubMed]
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned aerial vehicles (UAVs) for surveying marine fauna: A dugong case study. PLoS ONE 2013. [Google Scholar] [CrossRef] [PubMed]
- Chabot, D.; Bird, D.M. Evaluation of an off-the-shelf unmanned aircraft system for surveying flocks of geese. Waterbirds 2012, 35, 170–174. [Google Scholar] [CrossRef]
- Dos Santos, G.A.M.; Barnes, Z.; Lo, E.; Ritoper, B.; Nishizaki, L.; Tejeda, X.; Ke, A.; Han, L.; Schurgers, C.; Lin, A.; et al. Small unmanned aerial vehicle system for wildlife radio collar tracking. In Proceedings of the 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Philadelphia, PA, USA, 28–30 October 2014; 2014; pp. 761–766. [Google Scholar]
- Mulero-Pázmány, M.; Stolper, R.; van Essen, L.D.; Negro, J.J.; Sassen, T. Remotely piloted aircraft systems as a rhinoceros anti-poaching tool in Africa. PLoS ONE 2014, 9, e83873. [Google Scholar] [CrossRef] [PubMed]
- Jones, G.P.I.V.; Pearlstine, L.G.; Percival, H.F. An assessment of small unmanned aerial vehicles for wildlife research. Wildl. Soc. Bull. 2006, 34, 750–758. [Google Scholar] [CrossRef]
- Korner, F.; Speck, R.; Goktogan, A.; Sukkarieh, S. Autonomous airborne wildlife tracking using radio signal strength. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwai, 18–22 October 2010.
- Leonardo, M.; Jensen, A.; Coopmans, C.; McKee, M.; Chen, Y. A Miniature Wildlife Tracking UAV Payload System Using Acoustic Biotelemetry. In Proceedings of the 2013 ASME/IEEE International Conference on Mechatronic and Embedded Systems and Applications Portland, OR, USA, 4–7 August 2013.
- DJI. (n.d.). S800 EVO. Available online: http://www.dji.com/product/spreading-wings-s800-evo (accessed on 22 March 2015).
- FLIR. (n.d.). FLIR. Available online http://www.FLIR.com/cores/display/?id=54717 (accessed on 23 March 2015).
- IPI Learning. Kangaroos Boxing in Infrared [Video file]. Available online: https://www.youtube.com/watch?v=aBsvoWfHWXQ (accessed on 9 January 2014).
- Trail cameras. Imagers for watching wildlife [Video file]. Available online: https://www.youtube.com/watch?v=ZpBgt91Qor8 (accessed on 10 March 2012).
- Shumway, N.; Lunney, D.; Seabrook, L.; McAlpine, C. Saving our national icon: An ecological analysis of the 2011 Australian Senate inquiry into the status of the koala. Environ. Sci. Policy 2015, 54, 297–303. [Google Scholar] [CrossRef]
- Senate Environment and Communications References Committee. Completed inquiries 2010-2013: The Koala-Saving Our National Icon. Available online: http://www.aph.gov.au/Parliamentary_Business/Committees/Senate/Environment_and_Communications/Completed%20inquiries/2010-13/koalas/index (accessed on 16 November 2015).
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. https://doi.org/10.3390/s16010097
Gonzalez LF, Montes GA, Puig E, Johnson S, Mengersen K, Gaston KJ. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors. 2016; 16(1):97. https://doi.org/10.3390/s16010097
Chicago/Turabian StyleGonzalez, Luis F., Glen A. Montes, Eduard Puig, Sandra Johnson, Kerrie Mengersen, and Kevin J. Gaston. 2016. "Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation" Sensors 16, no. 1: 97. https://doi.org/10.3390/s16010097
APA StyleGonzalez, L. F., Montes, G. A., Puig, E., Johnson, S., Mengersen, K., & Gaston, K. J. (2016). Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors, 16(1), 97. https://doi.org/10.3390/s16010097