
An Approach to the Prototyping of an Optimized Limited Stroke Actuator to Drive a Low Pressure Exhaust Gas Recirculation Valve

Abstract
:1. Introduction
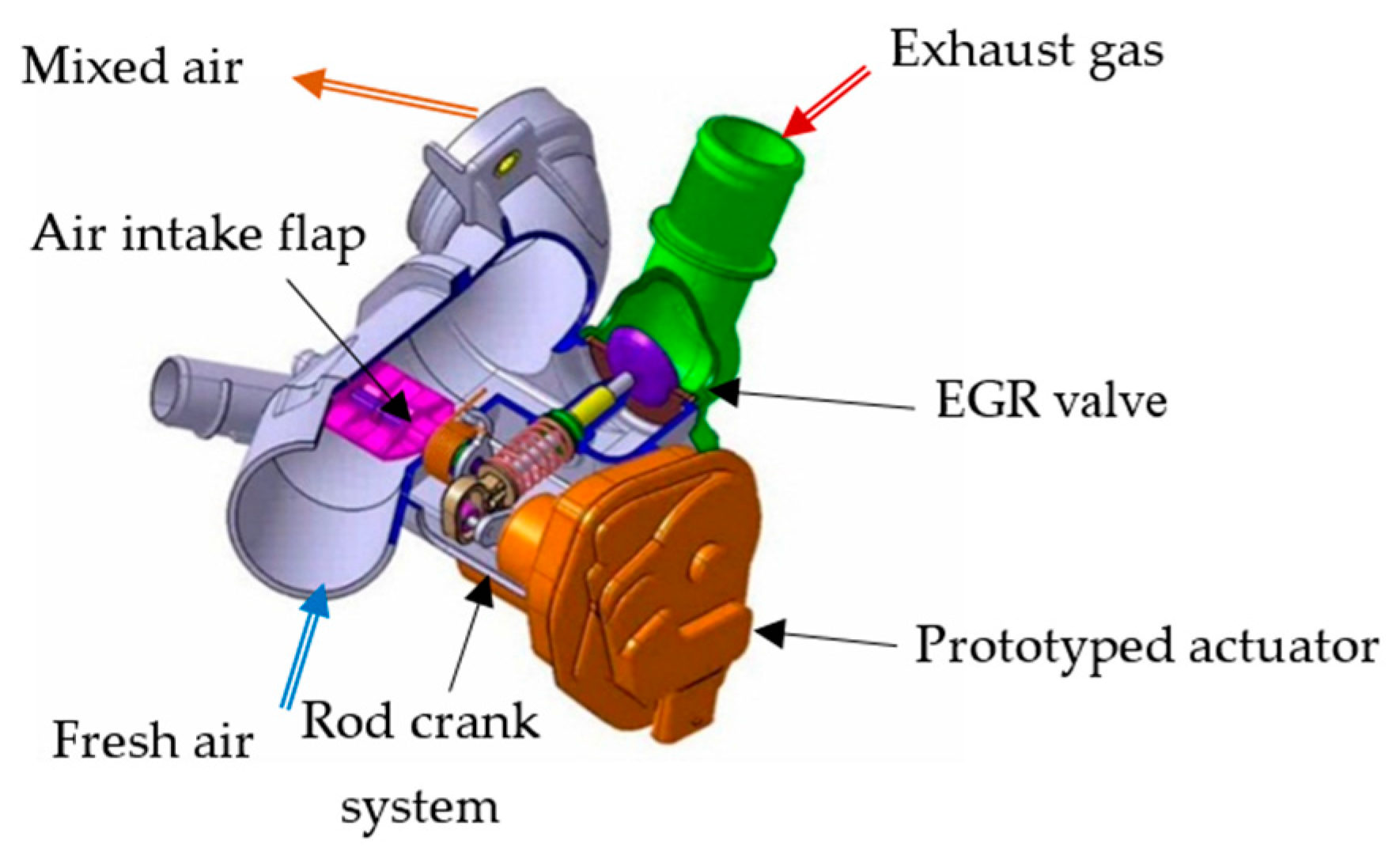
1.1. Automotive Context
1.2. Choice of Actuator Topology
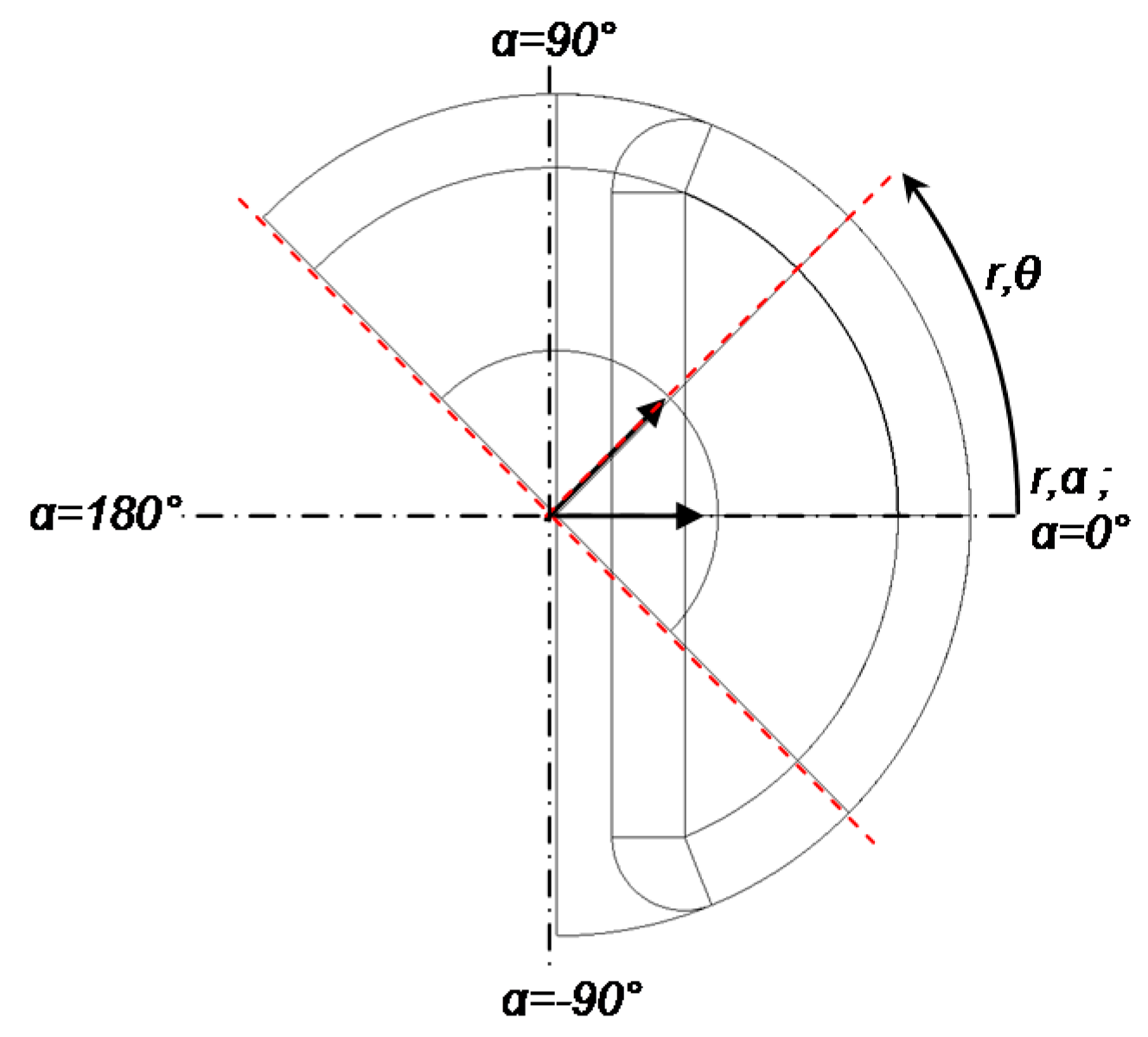
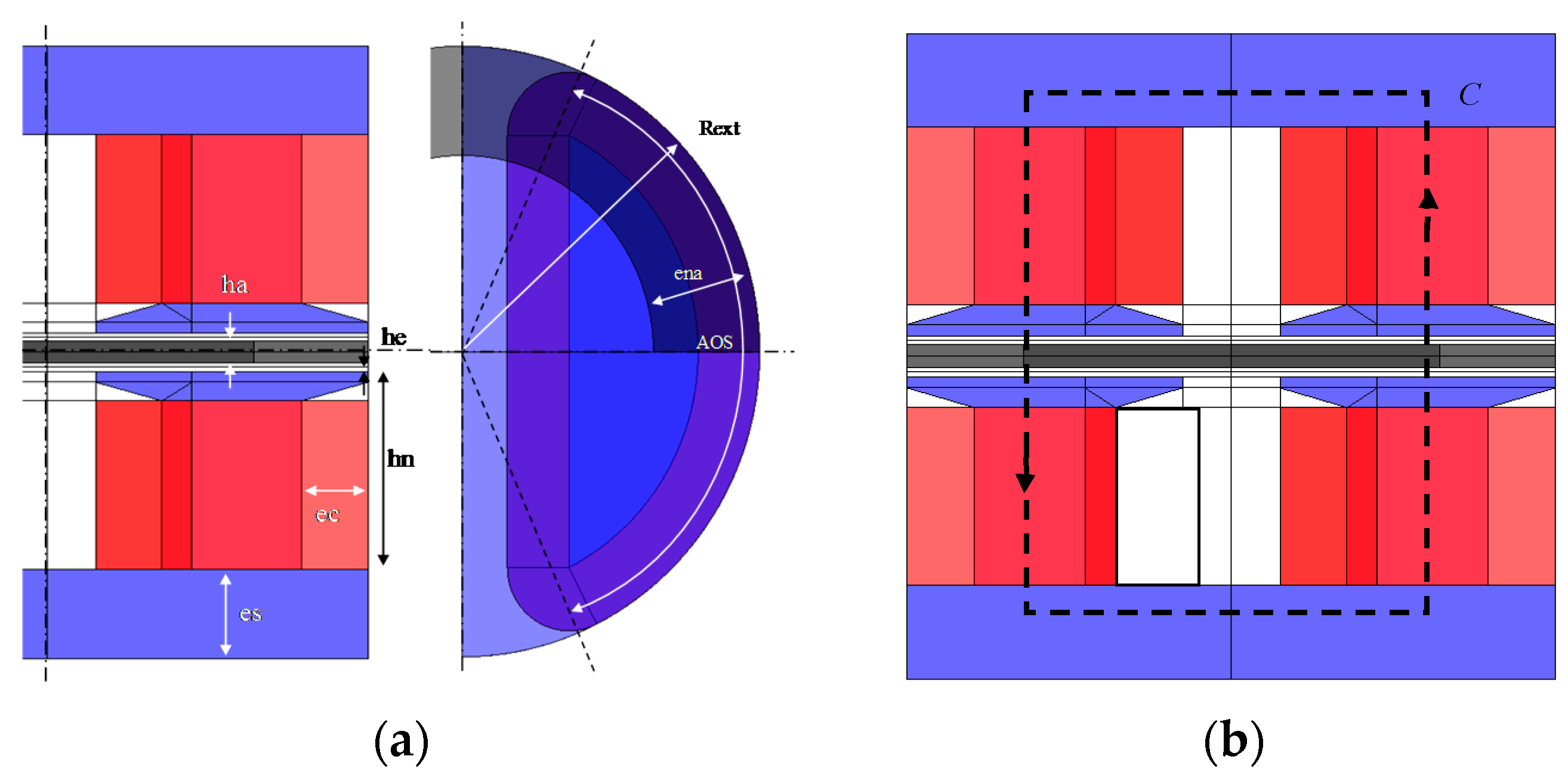
1.3. Axial Flux Machine Design Approach
2. Analytical Model
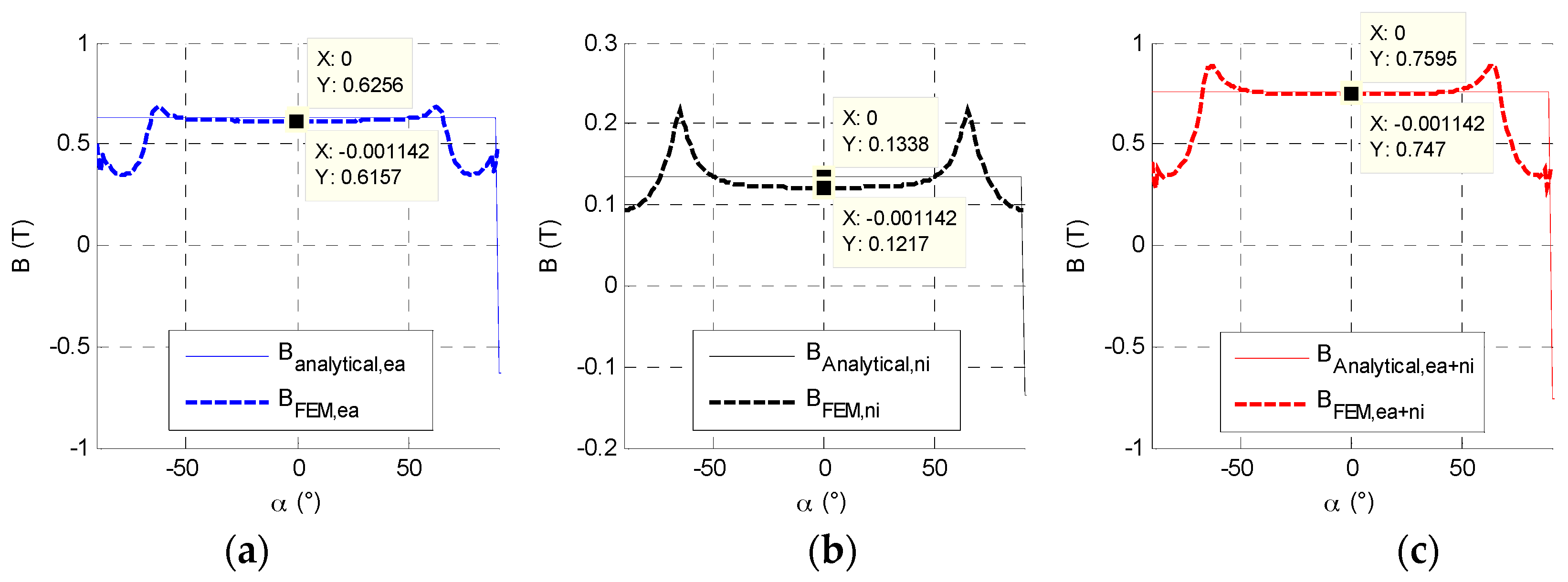
2.1. Air Gap Magnetic Flux Density Calculation
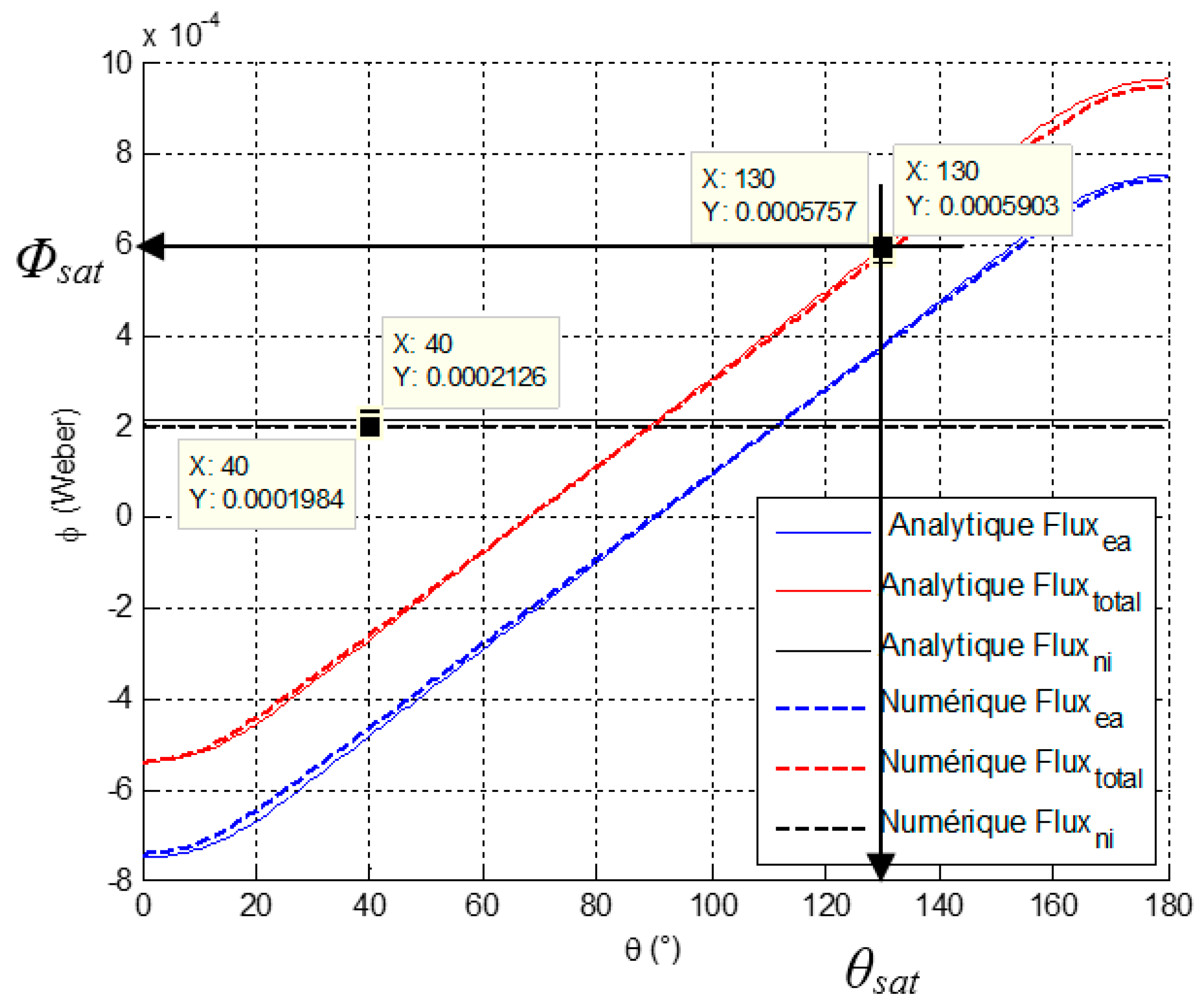
2.2. Excitation Flux Expression and Saturation Constraints
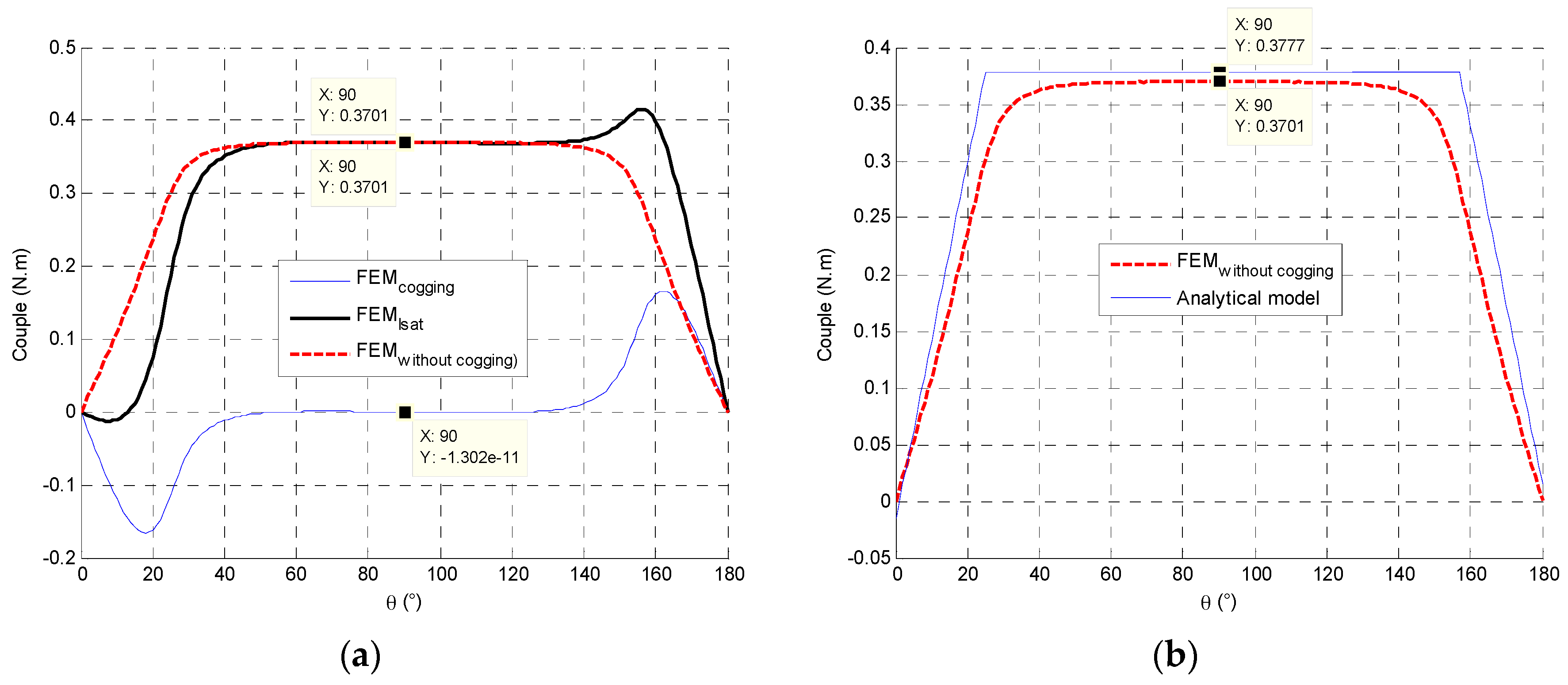
2.3. Torque Definition
2.4. Magnets Thickness Constraints
2.5. Electrical Resistance and Inductance Coils
2.6. Total Inertia at the Actuator Shaft End
2.7. Electromechanical Behavior
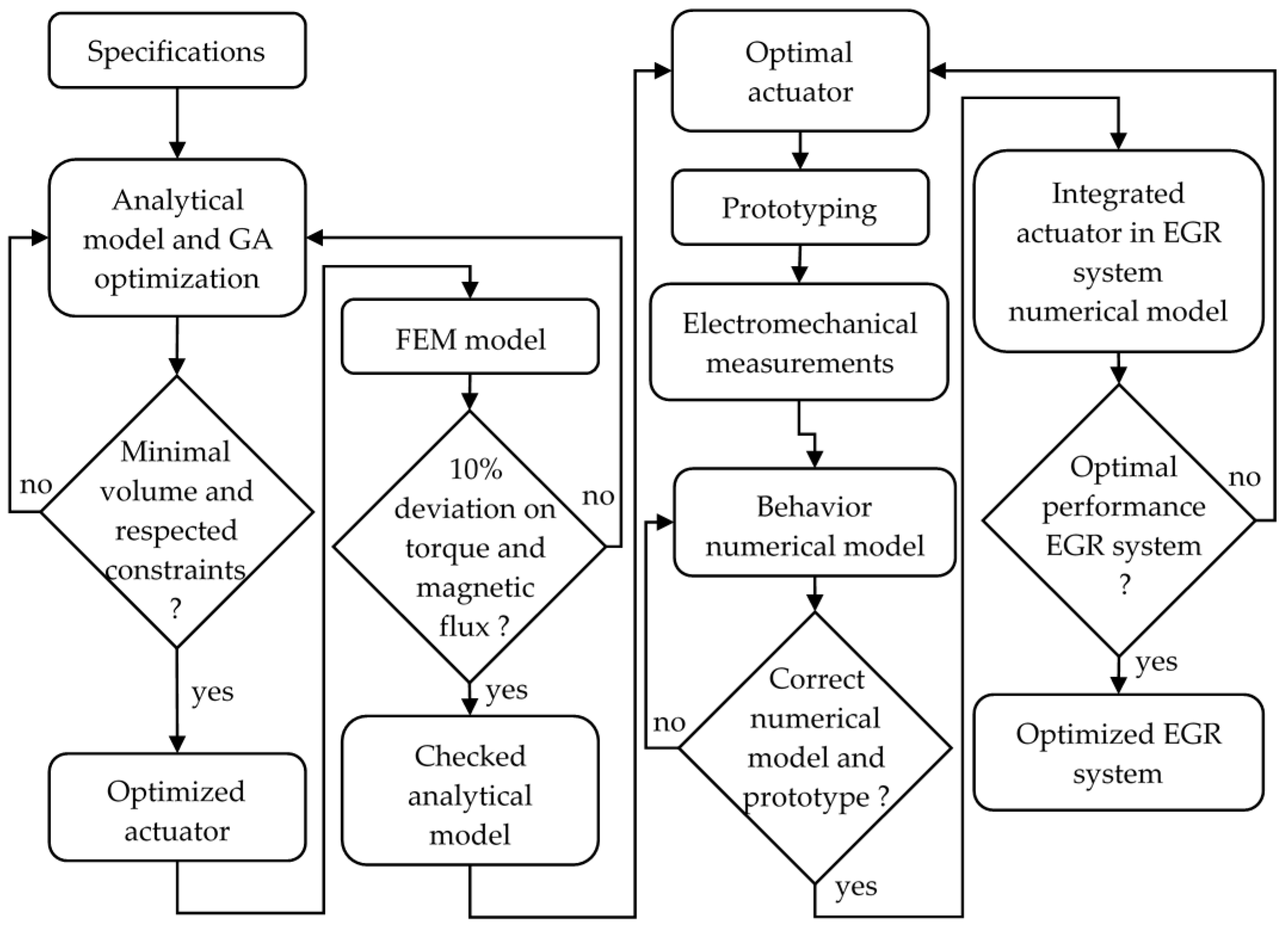
3. Optimization and Results
3.1. Algorithm Optimization
3.2. Functioning Conditions and Constraints
- a 130 °C temperature,
- a 9 V supply voltage,
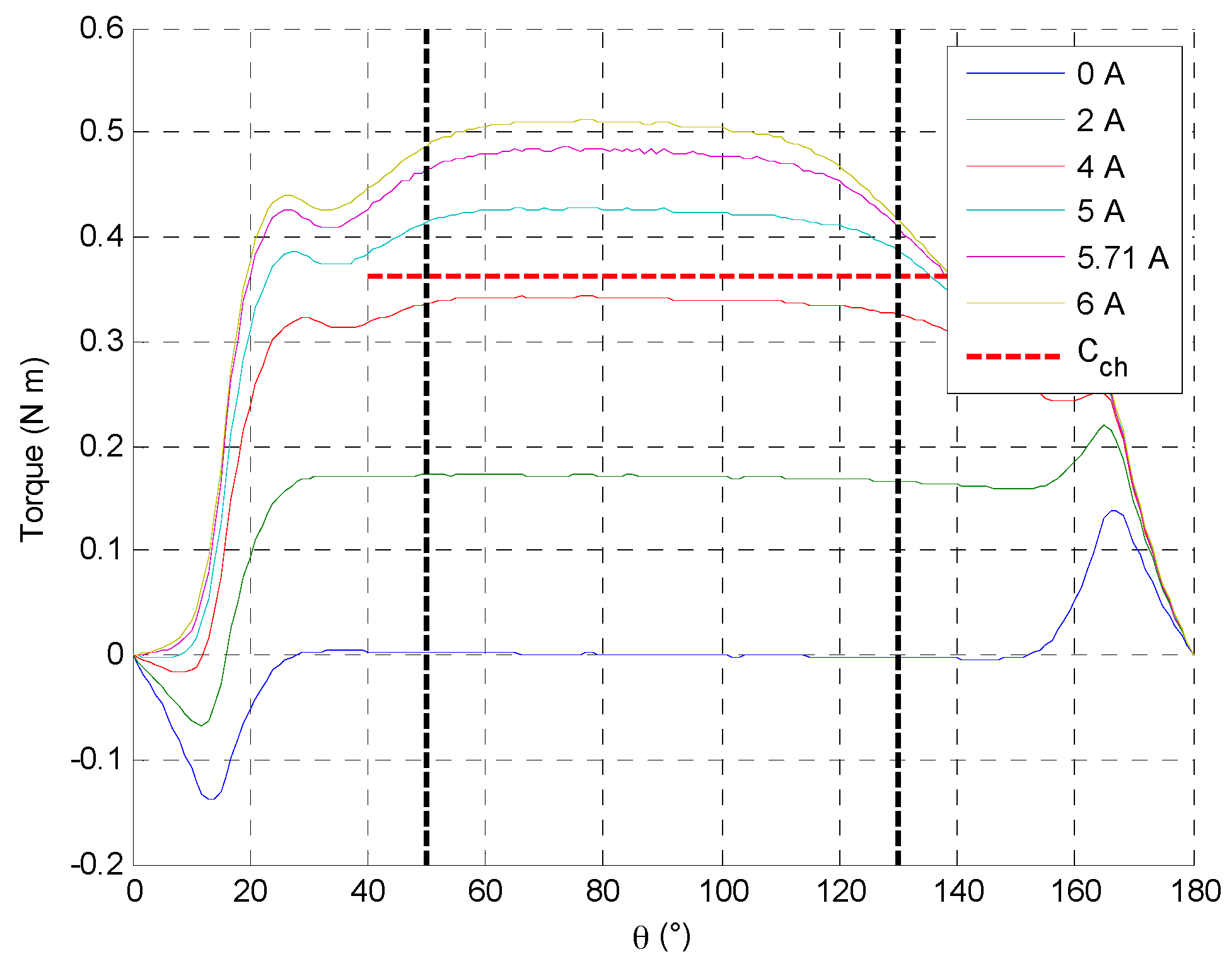
- a 363 mN·m minimal torque at the end of stroke,
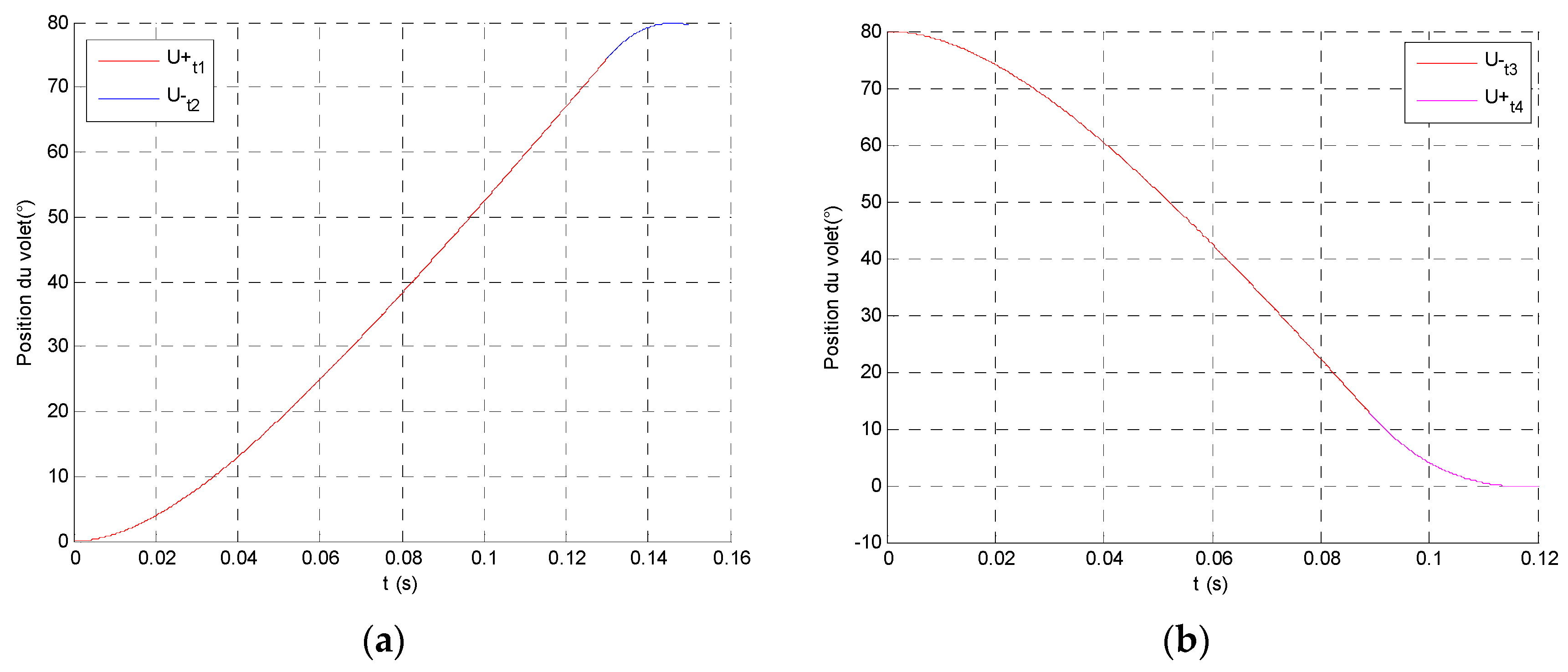
- a 150 ms time response for a 80° angular stroke.
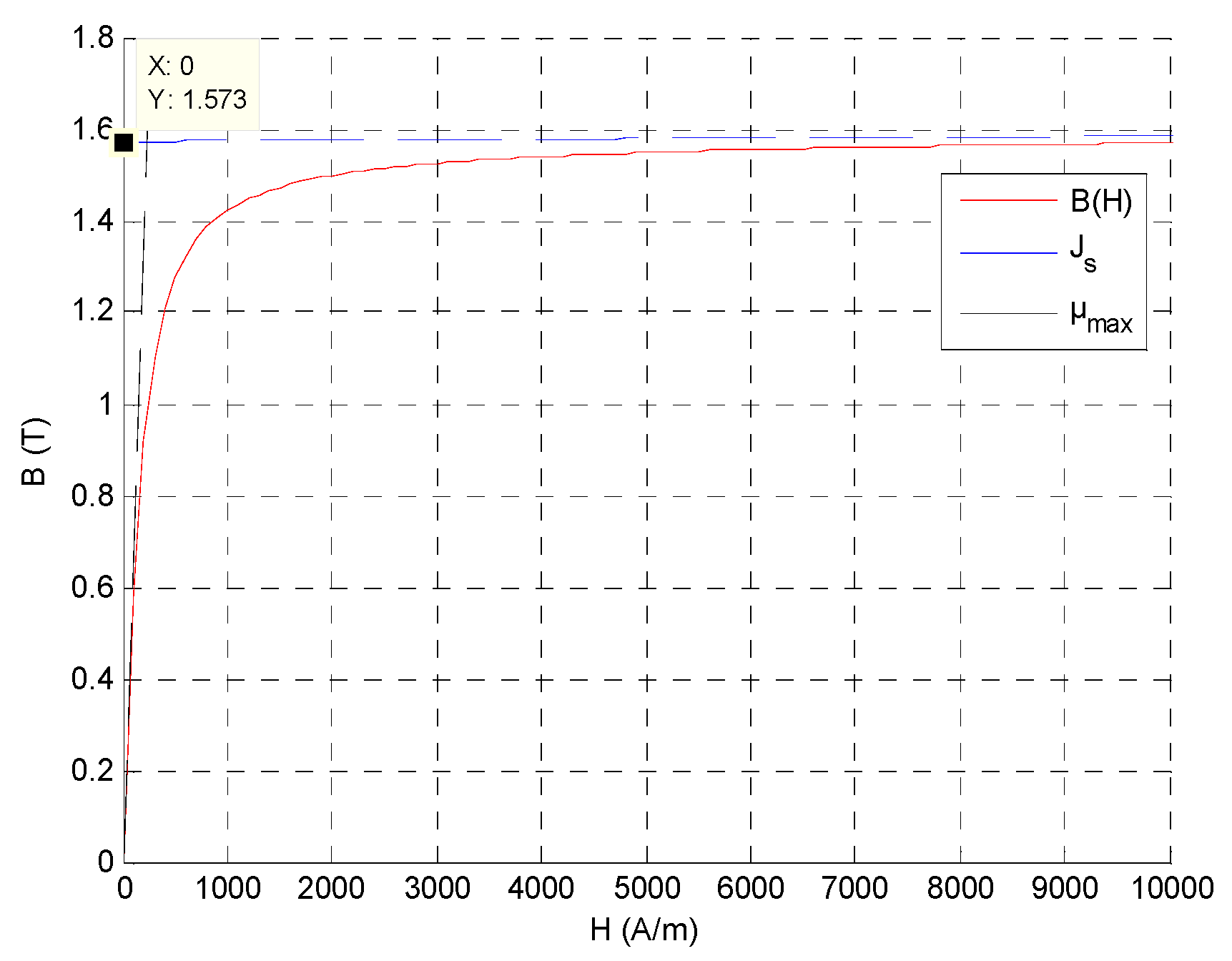
- the stator and rotor flux density should be lower than 1.57 T at the end of stroke, because of the saturation magnetic flux Φsat with a 4500 maximal relative permeability, as defined in [14],
- the magnet thickness (Equation (6)) should be higher than the demagnetization magnet thickness,
- the actuator torque should be higher than the sum inertial of torque and required torque on a 92° minimum stroke range (to include edge effect),
- the electromechanical time constant is three times lower than the response time,
- the current density is limited at 5 A/mm2 in the slot section,
- the maximal current is 10 A.
3.3. Optimization Results
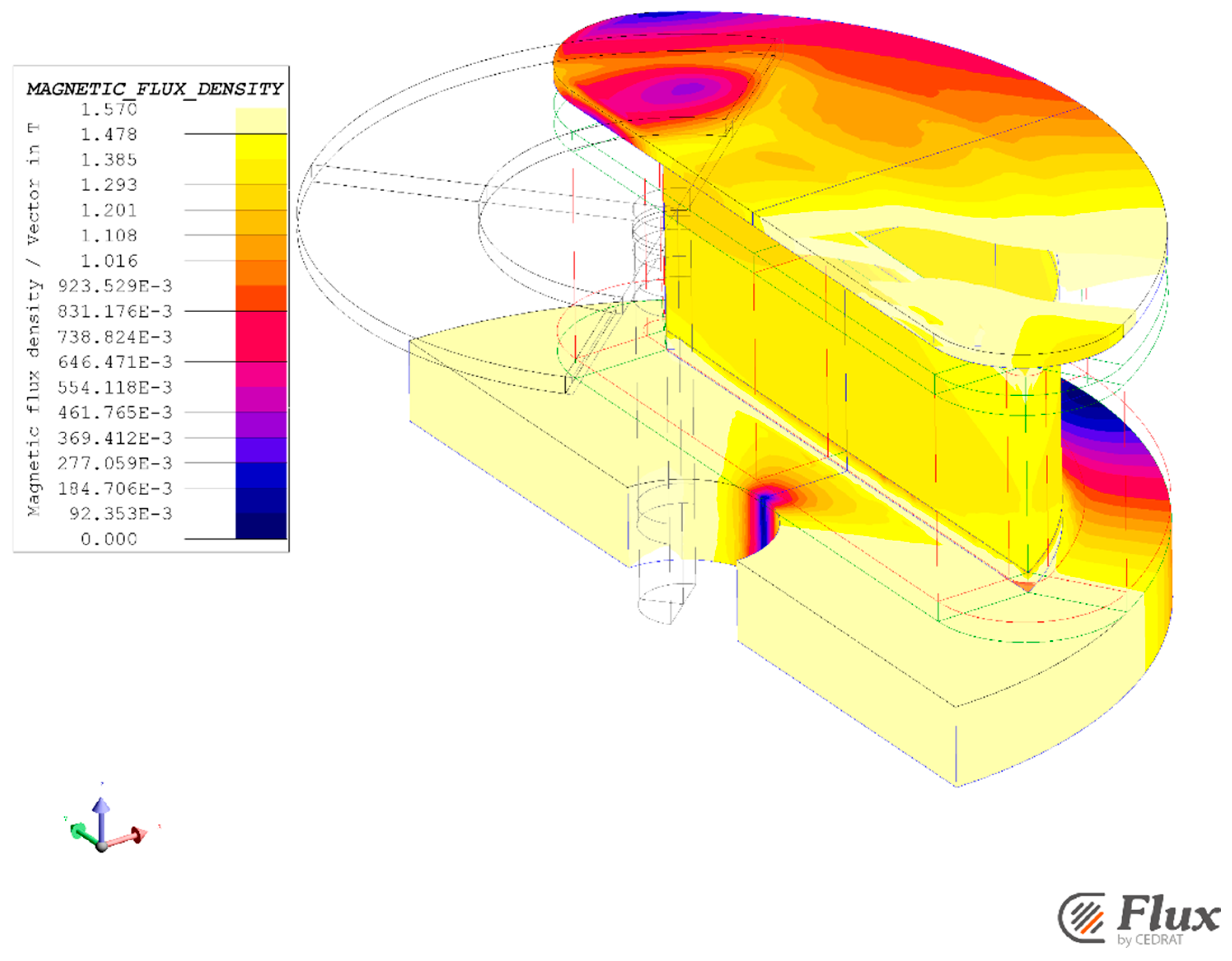
3.4. FEM Checking in Linear and Saturated Behavior
4. Actuators Characterization to Build an Electromechanical Behavior Model
4.1. Mechanical and Electric Behaviors Measurements
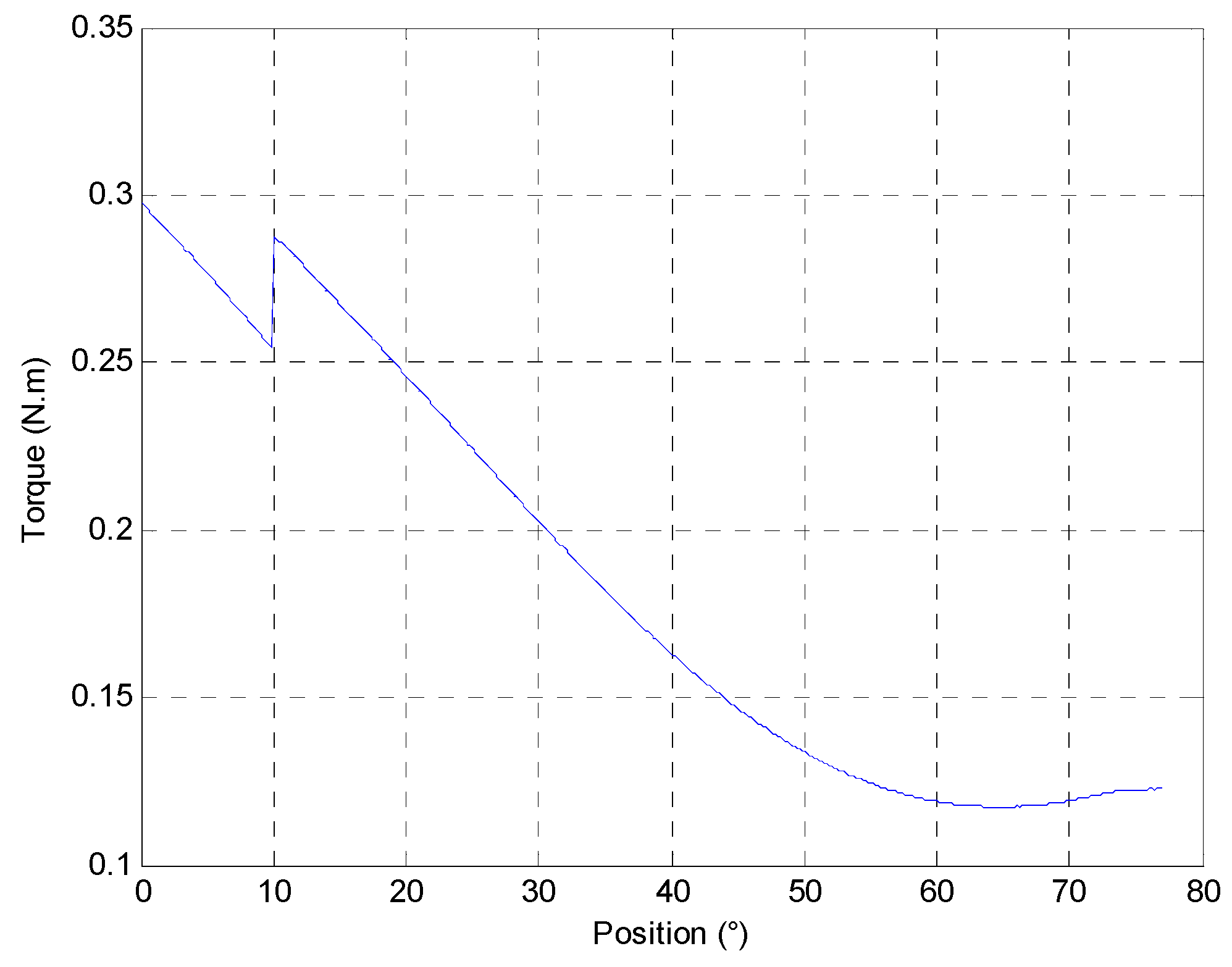
4.1.1. Non-Linear Torque
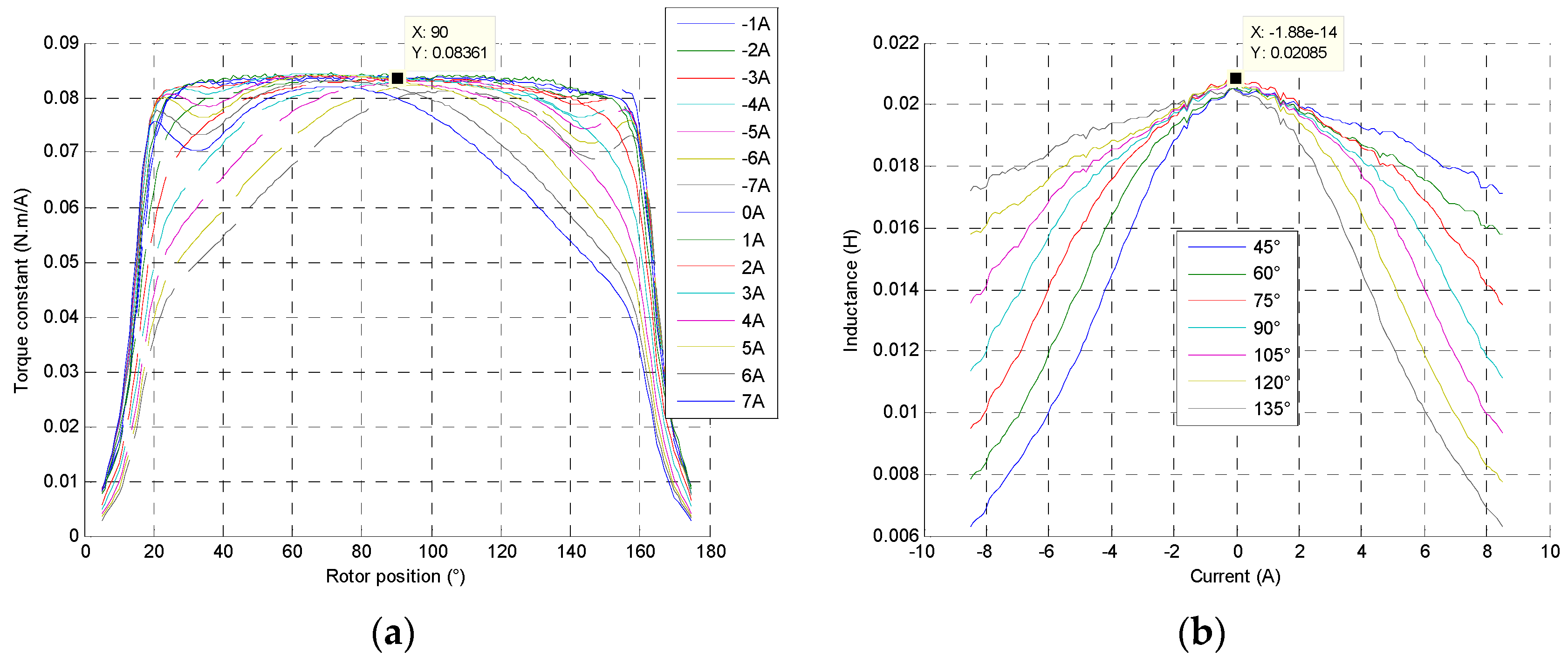
4.1.2. Non-Linear Inductance
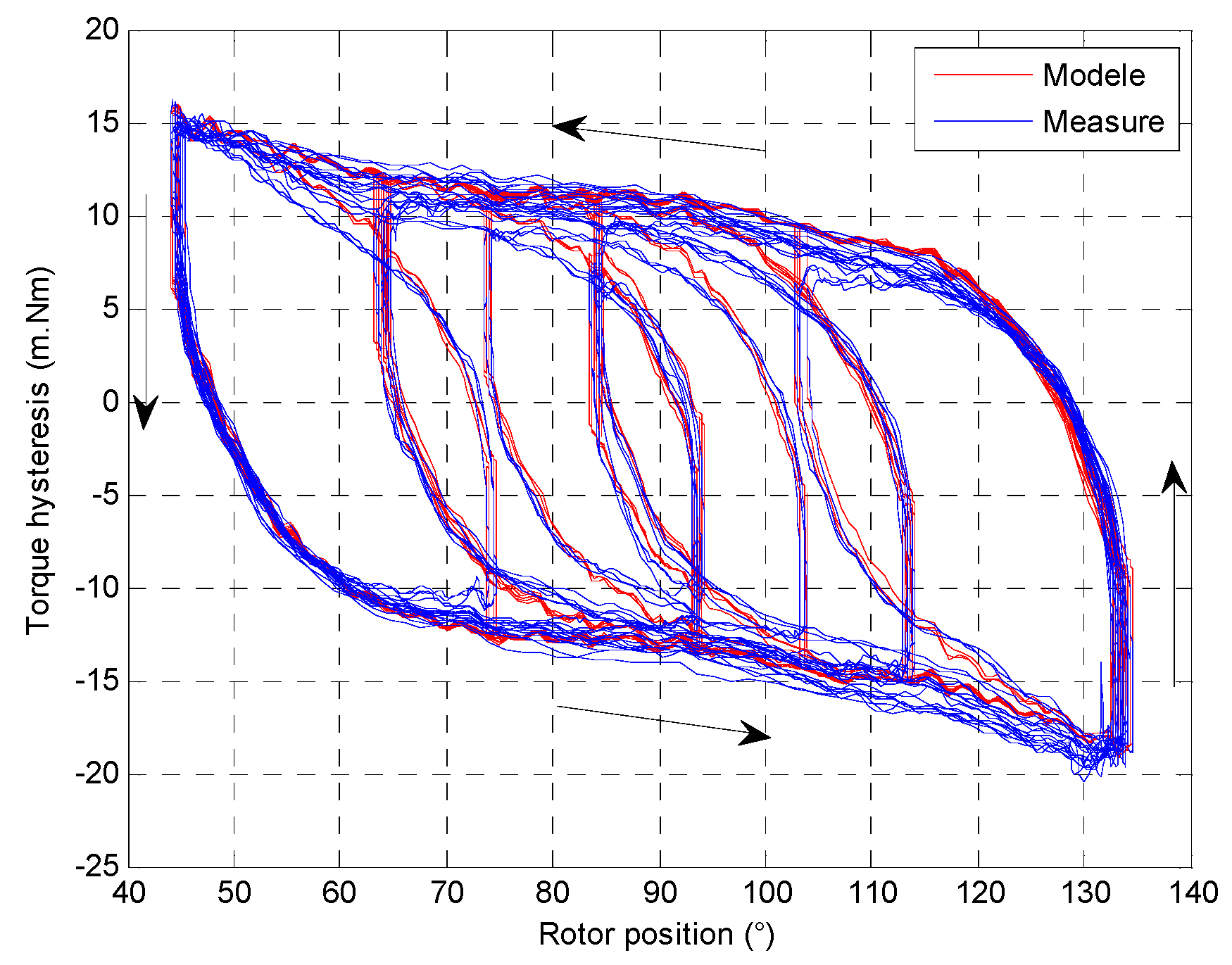
4.1.3. Magnetic Hysteresis Influence
4.2. Controllers
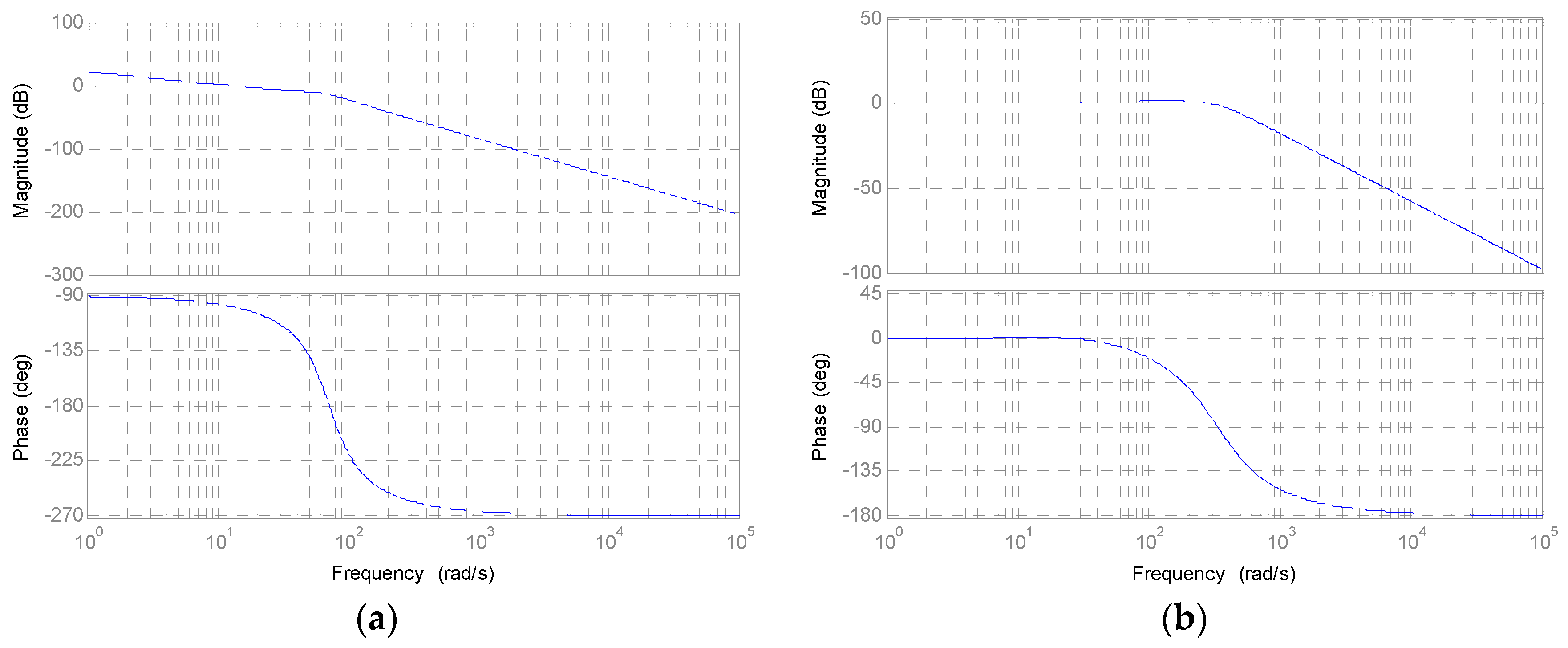
4.3. Dynamic Behavior Measurement and Direct Drive Model
4.4. Comparative Results between the Optimization and the Prototype
5. Actuator Energy Consumption with the EGR Load and Position Cycle
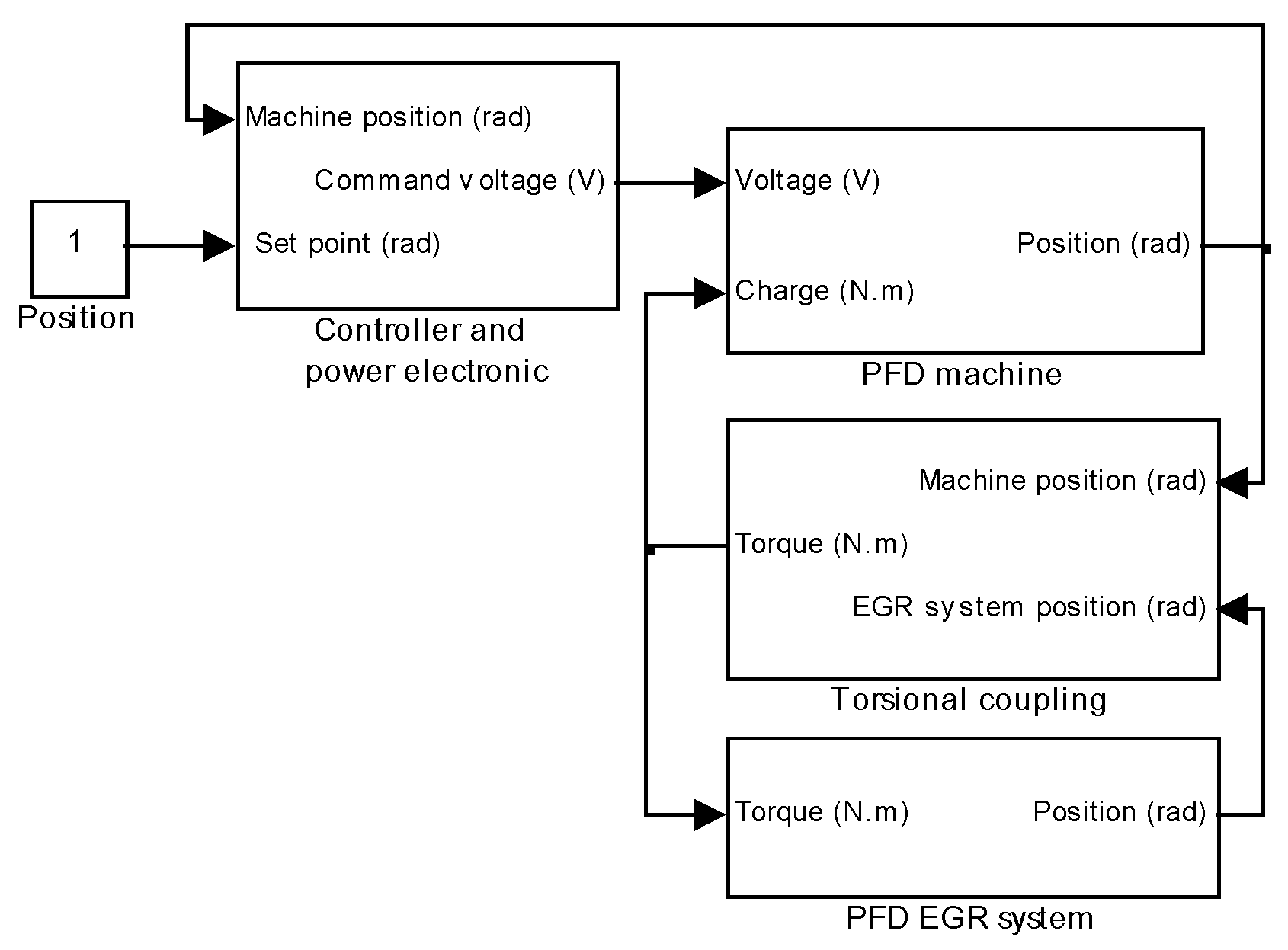
5.1. Mechanical EGR System and Actuator Coupling
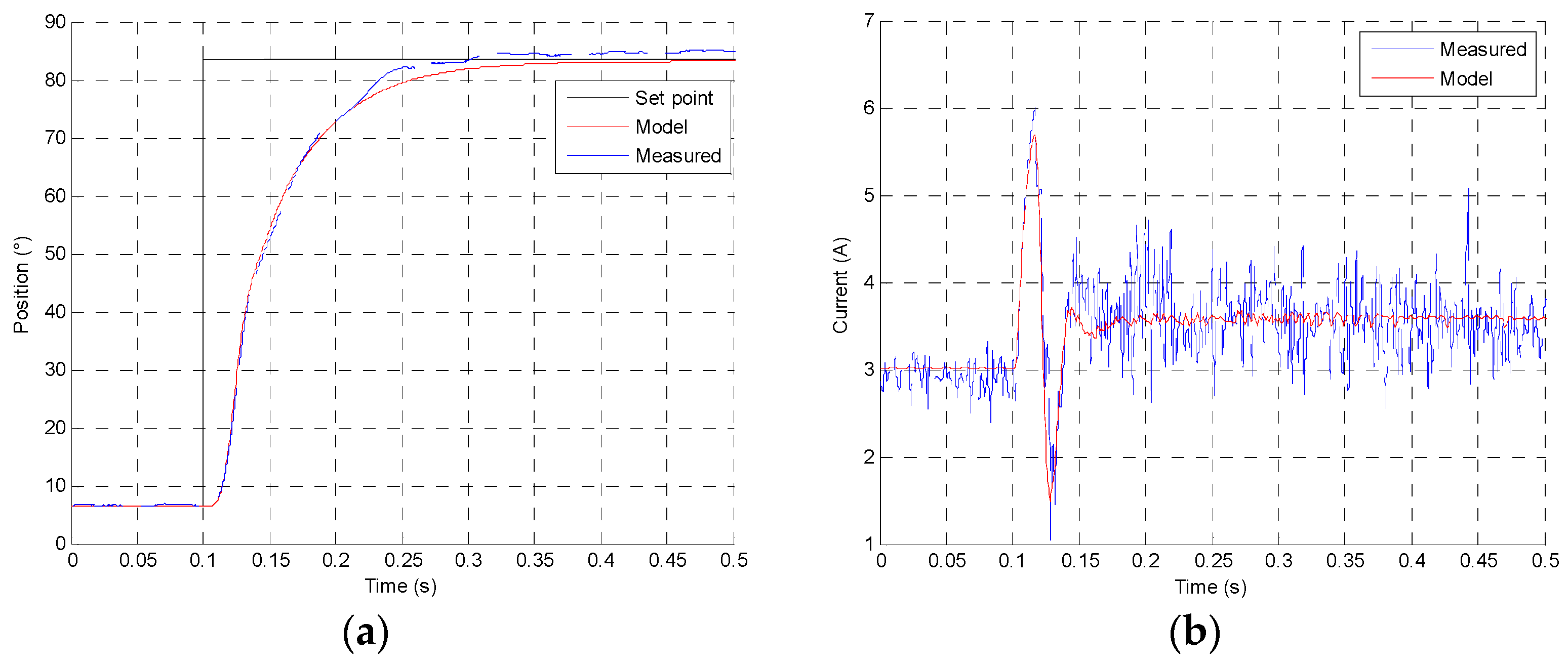
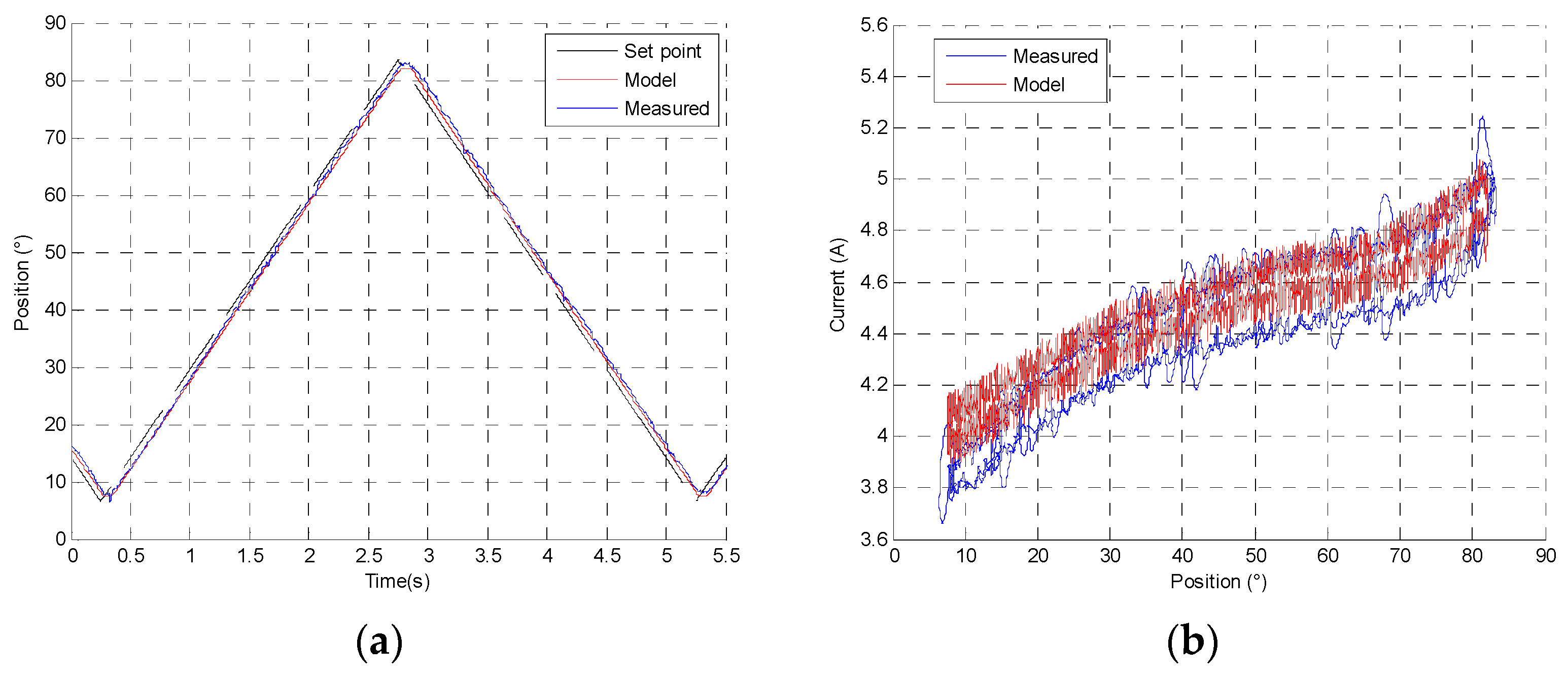
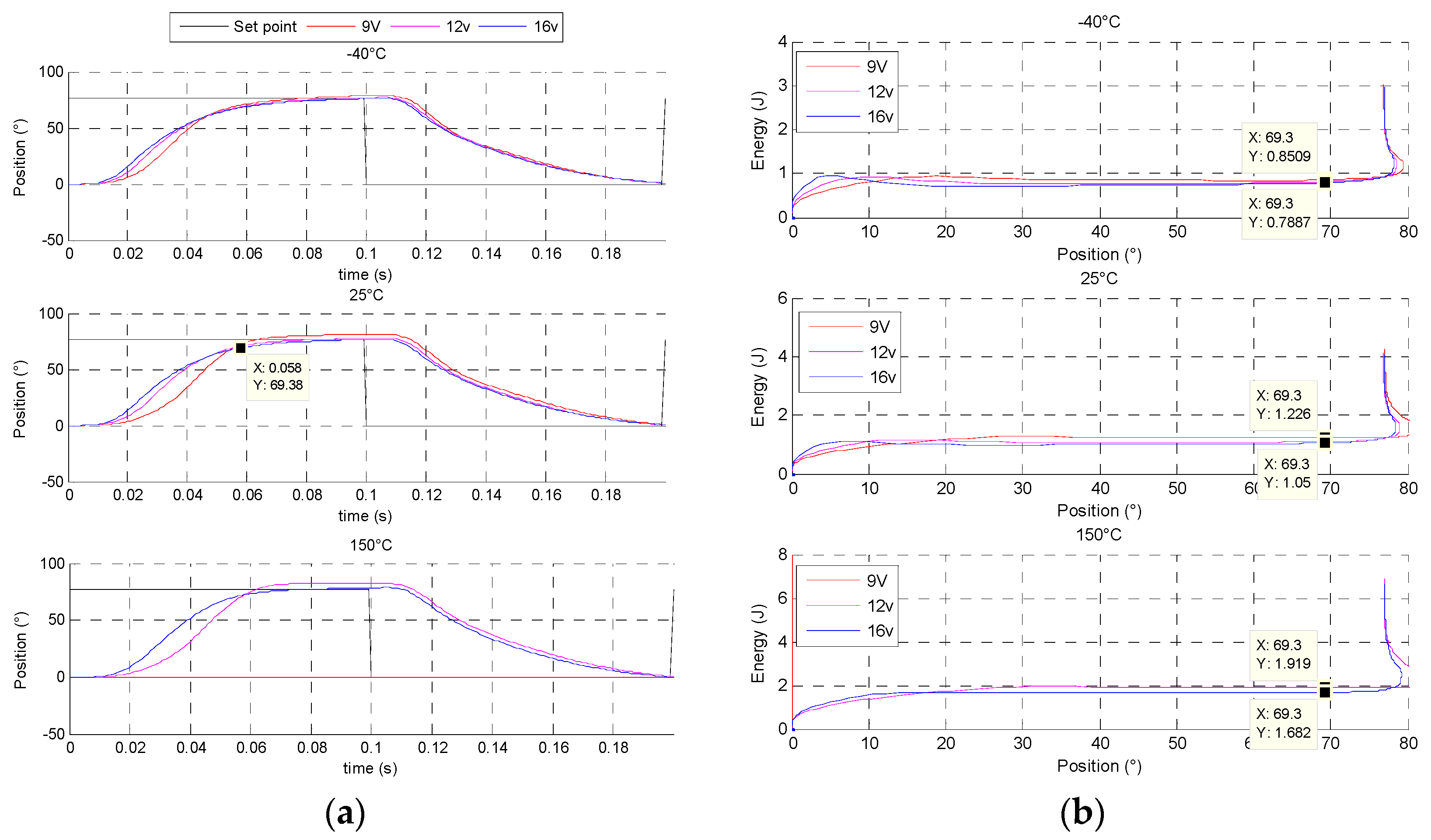
5.2. Increasing and Decreasing Position Step Response
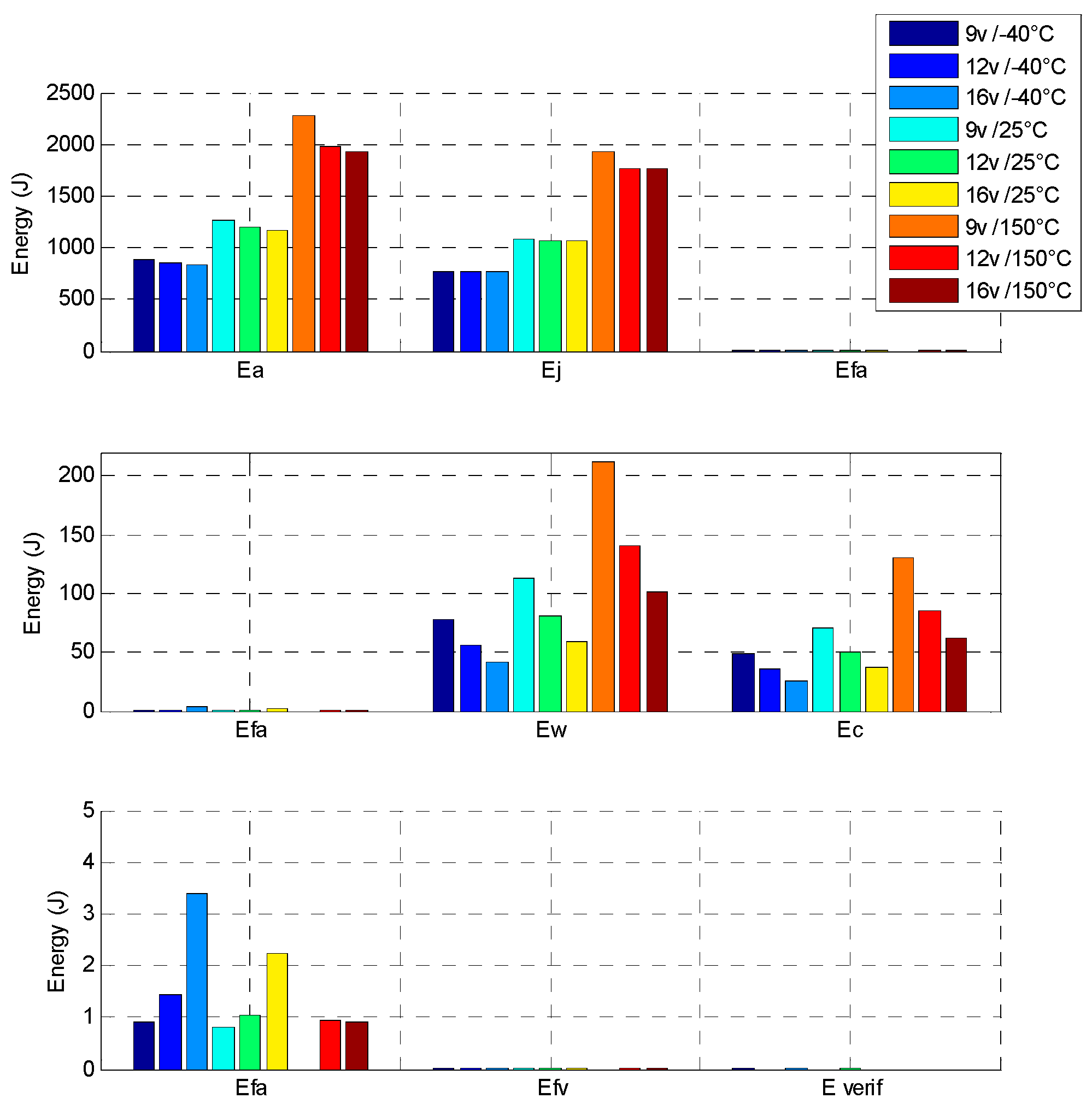
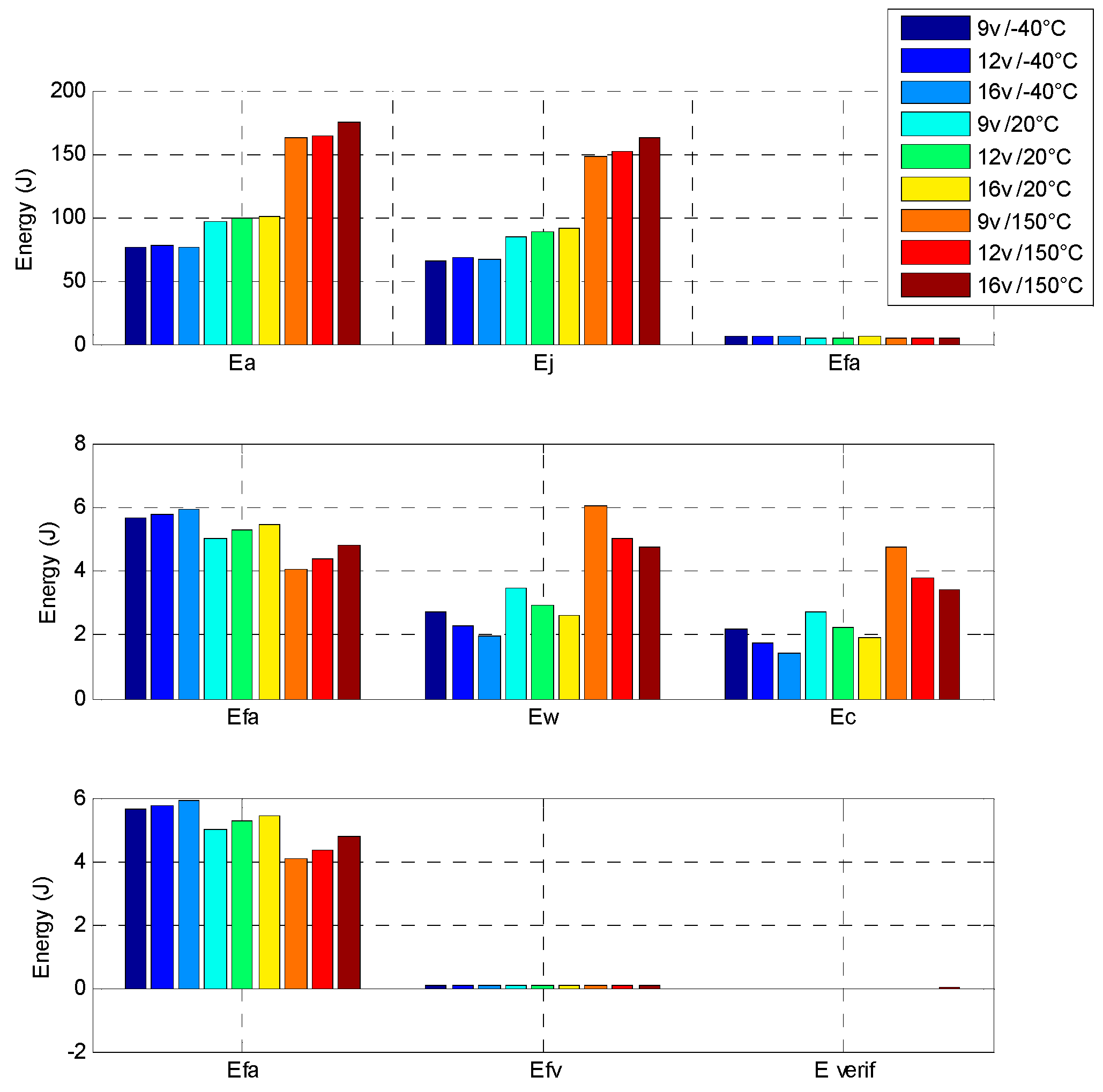
5.3. Energy Consumption in 60 s Position EGR Cycle
- when the temperature is increased, torque machine decreases according to the remanent flux density of magnets. On the contrary, the electrical resistance of wires increases, so for the same mechanical load level, the system consumes more electrical energy with high temperature level.
- the most of the energy consumption (90%) is dissipated in Joule losses inside the DC machine. The last 10% are mechanical losses inside gears and/or other Joule losses in resistive wire contact and commutation losses in H-bridge.
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Migaud, J. OCSYGENE 6, Optimization in Air Intake and EGR Systems to Euro 6 Standard and CO2 Reduction. In Proceedings of the SIA International Conference: Diesel Powertrain, Innovative Technologies for Future Emissions Targets, Rouen, France, 5–6 June 2012.
- Wang, J. Air fraction estimation for multiple combustion mode diesel engines with dual-loop EGR systems. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007.
- Iles-Klumpner, D.; Serban, I.; Risticevic, M. Automotive Electrical Actuation Technologies. In Proceedings of the 2006 IEEE Vehicle Power and Propulsion Conference, Windsor, UK, 6–8 September 2006.
- Gutfrind, C. Electromechanical Actuators Optimization Used in Thermal Engine Air Flow Regulation. Ph.D. Thesis, Supelec, Gif-sur-Yvette, France, 11 July 2012. [Google Scholar]
- Kowatari, T.; Tokumoto, S.; Usui, T. Optimization of an Electronic Throttle Control Actuator for gasoline Direct Injection Engines. SAE 1999. [Google Scholar] [CrossRef]
- Automotive DC motors. Available online: http://www.johnsonelectric.com/fr/product-technology/motion/dc-motors/ (accessed on 10 May 2016).
- Gutfrind, C.; Dufour, L.; Liebart, V.; Migaud, J. Energy consumption comparison between two optimized limited motion actuator topologies for an EGR system used in automotive application. In Proceedings of the PCIM Europe 2015 International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 19–21 May 2015.
- Bencheikh, N.; Letty, R.L.; Claeyssen, F.; Magnac, G.; Migliorero, G. Limited angle torque actuator for a fine angular positioning. In Proceedings of the 12th International Conference on New Actuators and 6th International Exhibition on Smart Actuators and Drive Systems, Bremen, Germany, 14–16 June 2010.
- Hekmati, P.; Mirsalim, M. Design and analysis of a novel axial-flux slotless limited angle torque motor with trapezoidal cross section for the stator. IEEE Trans. Energy Conv. 2013, 28, 815–822. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Mirsalim, M.; Cavagnino, A. Analysis, optimization and prototyping of a brushless DC limited angle torque motor with segmented rotor pole tip structure. IEEE Trans. Ind. Electron. 2015, 62, 4985–4993. [Google Scholar] [CrossRef]
- Gutfrind, C.; Dufour, L.; Liebart, V.; Vannier, J.-C.; Vidal, P. Comparative study of limited motion direct drive concepts for automotive applications. In Proceedings of the ISEF Conference, Valence, Spain, 10–12 September 2015.
- Chiang, W.-W. Optimal DC motor design for constant voltage seek motion. IEEE Trans. Energy Conv. 1990, 5, 195–202. [Google Scholar] [CrossRef]
- Skaar, S.E.; Nilssen, R. Genetic Optimization of Electric Machines, a state of Art Study. In Proceedings of the EPE conference NORPIE 2004, Trondheim, Norway, June 14–16 2004.
- BASF. Data Sheet Catamold FeSi3 for Sintered Components. Available online: http://worldaccount.basf.com/wa/NAFTA/Catalog/ChemicalsNAFTA/doc4/BASF/PRD/30046468/.pdf?urn=urn:documentum:eCommerce_sol_EU:09007bb28004768d.pdf (accessed on 10 May 2016).
- CEDRAT FLUX-3D, FLUX 12.0 user guide, Isotropic/ anisotropic soft magnetic material: analytic saturation curve. Available online: https://gate.cedrat.com/j_cedrat/common/portlet/index (accessed on 10 May 2016).
- Hall-effect position sensor technology. Available online: http://www.efiautomotive.com/produ-cts/position-sensors/ (accessed on 10 May 2016).
- Chun, T.-Y.; Hur, G.-Y.; Choi, K.-J.; Woo, H.-W.; Kang, D.-S.; Kim, J.-C. Design of the Aeroload Simulator for the Test of a Small Sized Electro-Mechanical Actuator. In Proceedings of the IEEE International Conference on Control, Automation and System, Seoul, Korea, 17–20 October 2007.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Min. Limit | Initial Value | Max. Limit | Optimal Value | |
|---|---|---|---|---|---|---|
| Magnet thickness ratio | ha | - | 0.001 | 2/62 | 0.9 | 0.043 |
| Pole height ratio | hn | - | 0.1 | 21.5/31 | 0.9 | 0.7271 |
| Polar teeth opening angle | aon | ° | 100 | 124 | 160 | 117 |
| Coil thickness | Eb | mm | 2 | 5.4 | 8 | 5.74 |
| Copper diameter | dcu | mm | 0.1 | 0.9 | 2.5 | 0.9 |
| External raduis | Rext | mm | 10 | 35 | 30 | 32.6 |
| External height | Hext | mm | 10 | 62 | 51 | 59.4 |
| Forward accelerating time | Ta | ms | 1 | 87 | 149 | 86.8 |
| Backward accelerating time | Tr | ms | 1 | 5.4 | 149 | 5.3 |
| Results | Performance | Unit | Analytic | FEM | Deviation % |
|---|---|---|---|---|---|
| Magnet flux density | Bea | mT | 597 | 590 | 1.1 |
| Fmm flux density | Bni | mT | 278 | 262 | 6.1 |
| Air gap flux density | Be | mT | 875 | 867 | <1 |
| Saturation magnetic flux at 130° | Φsat | µWb | 627 | 587 | 7 |
| Actuator torque at saturation current | Tm | N.m | 0.497 | 0.489 | 1.6 |
| Magnetomotive force | Ni | A.t | 445.95 | 445.32 | <1 |
| Result at 25 °C | Unit | Analytical | FEM | Prototype | |
|---|---|---|---|---|---|
| Electrical resistance | R | Ω | 1.12 | N C | 1.2 |
| Electrical Inductance | L | H | 24 | 22 | 21 |
| Torque constant | Kt | mN·m/A | 90 | 89 | 84 |
| Inertia rotor | Jm | kg·m2 | 0.8 × 10−5 | N.C | 1.96 × 10−5 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutfrind, C.; Dufour, L.; Liebart, V.; Vannier, J.-C.; Vidal, P. An Approach to the Prototyping of an Optimized Limited Stroke Actuator to Drive a Low Pressure Exhaust Gas Recirculation Valve. Sensors 2016, 16, 735. https://doi.org/10.3390/s16050735
Gutfrind C, Dufour L, Liebart V, Vannier J-C, Vidal P. An Approach to the Prototyping of an Optimized Limited Stroke Actuator to Drive a Low Pressure Exhaust Gas Recirculation Valve. Sensors. 2016; 16(5):735. https://doi.org/10.3390/s16050735
Chicago/Turabian StyleGutfrind, Christophe, Laurent Dufour, Vincent Liebart, Jean-Claude Vannier, and Pierre Vidal. 2016. "An Approach to the Prototyping of an Optimized Limited Stroke Actuator to Drive a Low Pressure Exhaust Gas Recirculation Valve" Sensors 16, no. 5: 735. https://doi.org/10.3390/s16050735
APA StyleGutfrind, C., Dufour, L., Liebart, V., Vannier, J. -C., & Vidal, P. (2016). An Approach to the Prototyping of an Optimized Limited Stroke Actuator to Drive a Low Pressure Exhaust Gas Recirculation Valve. Sensors, 16(5), 735. https://doi.org/10.3390/s16050735