
Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks

 , , and
, , and
Abstract
:1. Introduction
2. Chosen Deployment Algorithms
- at least two robots and one of them belongs to the backbone: the robot keeps moving randomly and avoiding obstacles to spread the network as much as possible.
- a single robot that belongs to the backbone: to prevent loss of connectivity, the robot stops until it gets connected to another robot that travels nearby.
- at least a robot, but none of these robots belong to the backbone: the robot joins the backbone, stops and notifies its change of status to the rest of the network.
- no robot: the robot moves backwards until it finds some robot with which to connect.
- Repulsion force(s) that pushes the robot away from nearby robots or obstacles to prevent collisions.
- Repulsion force(s) that aims at expanding the network by keeping robots away from each other.
- An attraction force (clustering force) . Attraction grows along with to prevent the loss of communication.
3. Evaluation Parameters
4. Experiments and Results
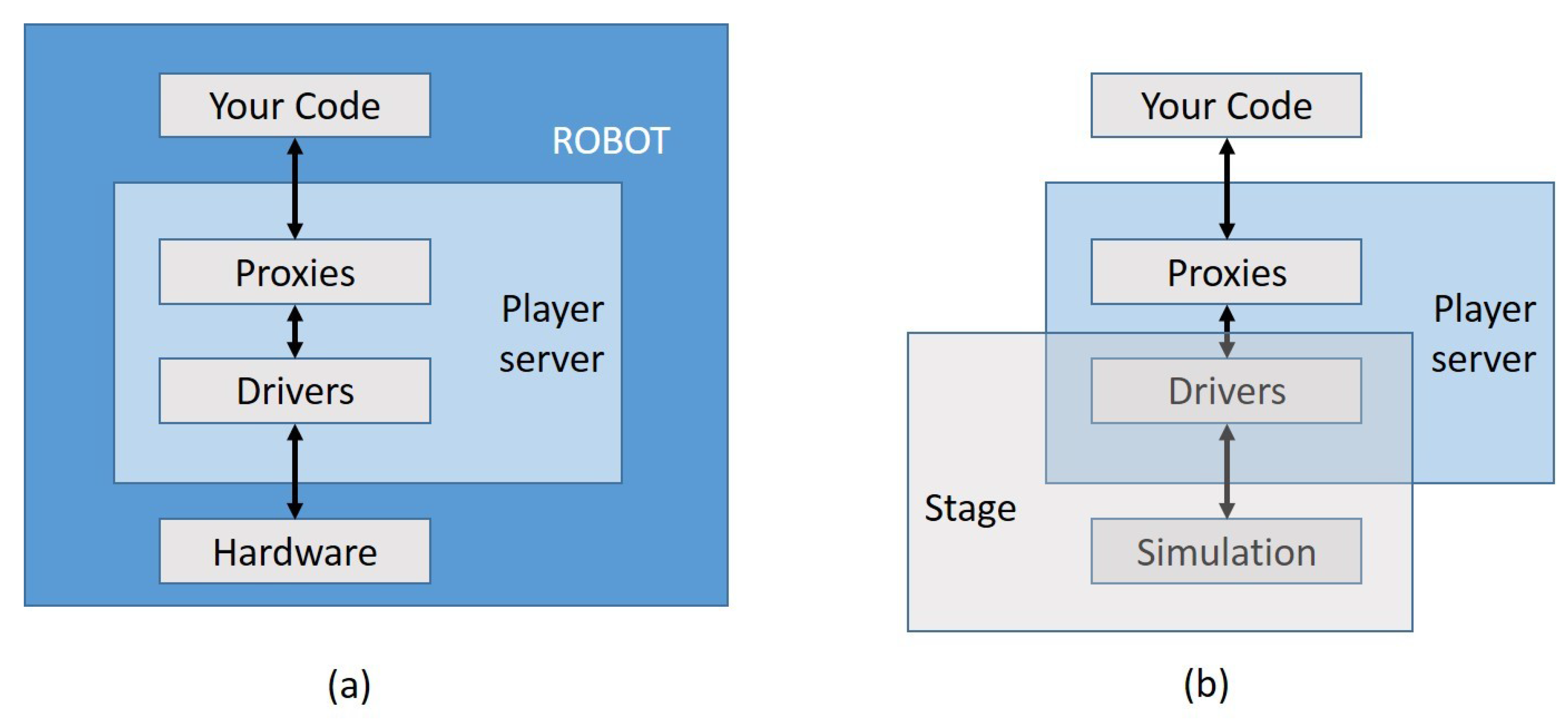
4.1. Experimental Setup
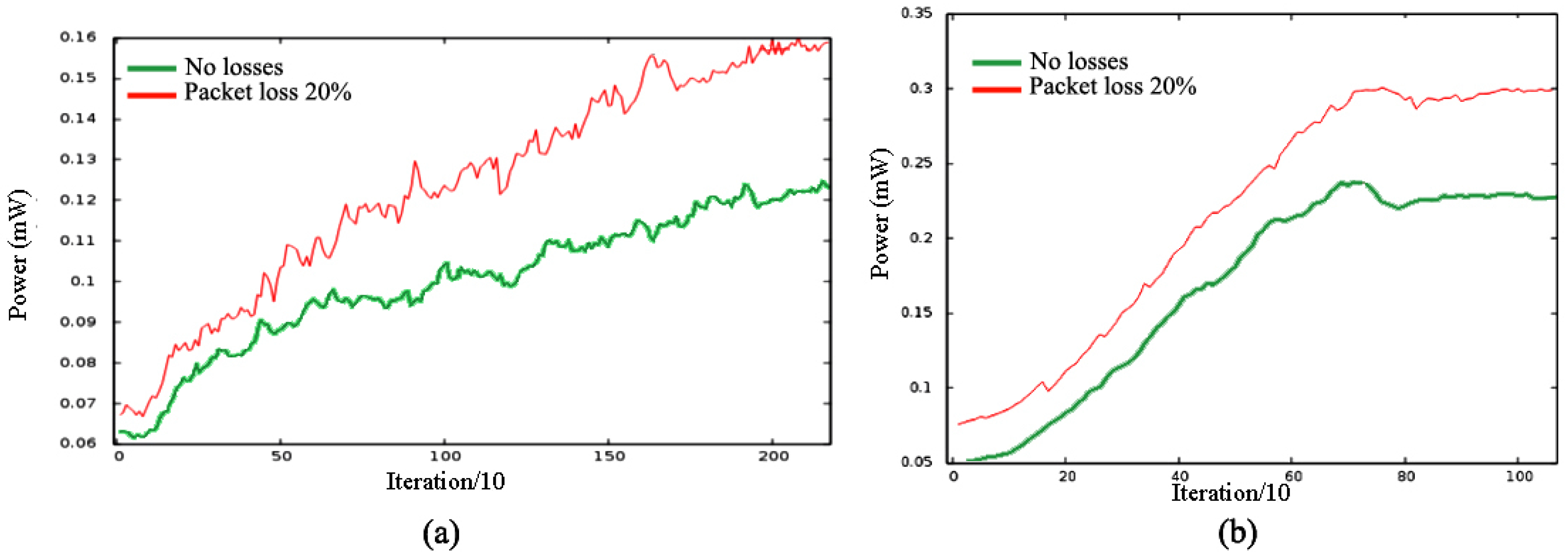
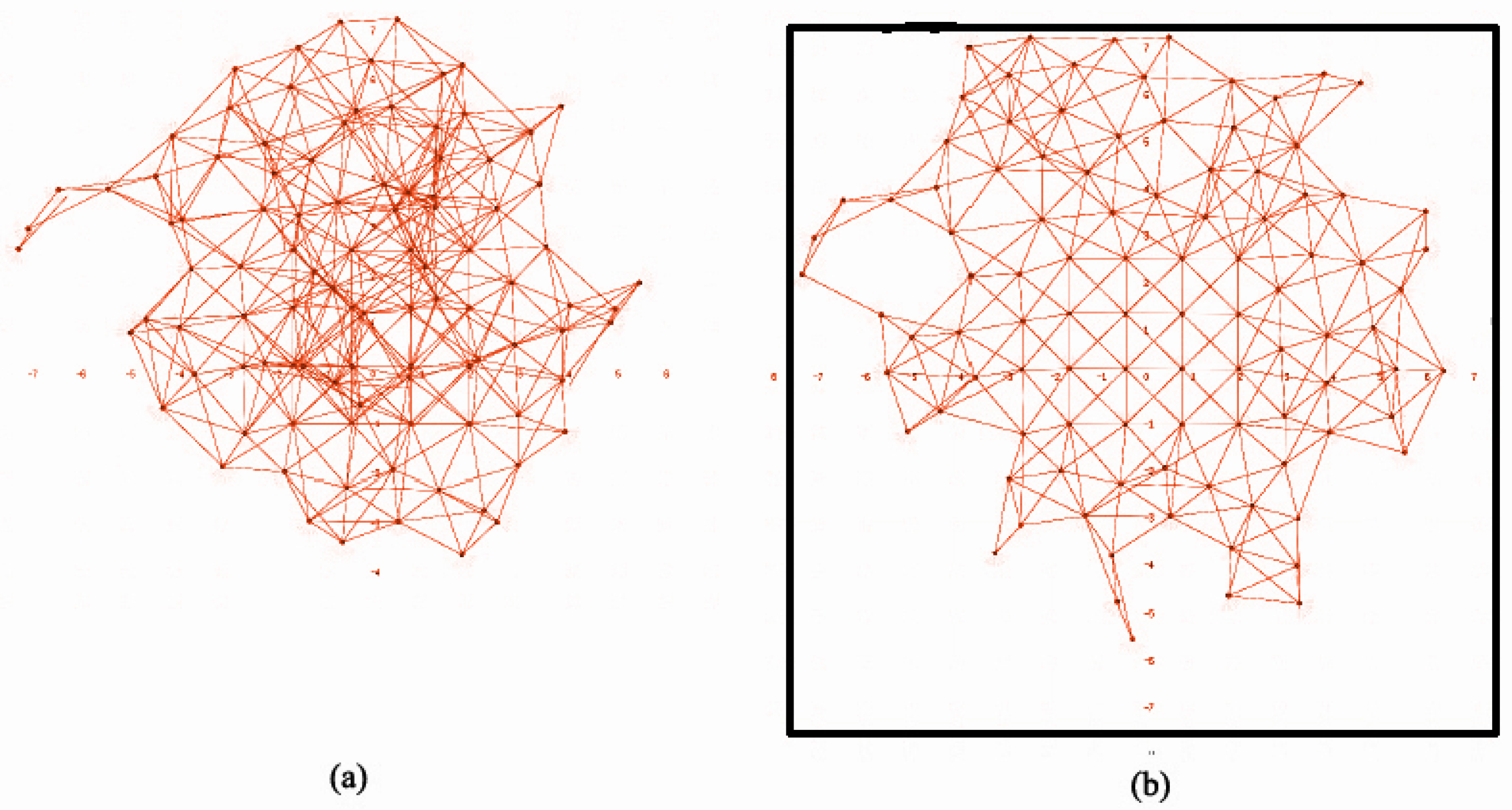
4.2. Simulations
4.2.1. BDA
4.2.2. SPF
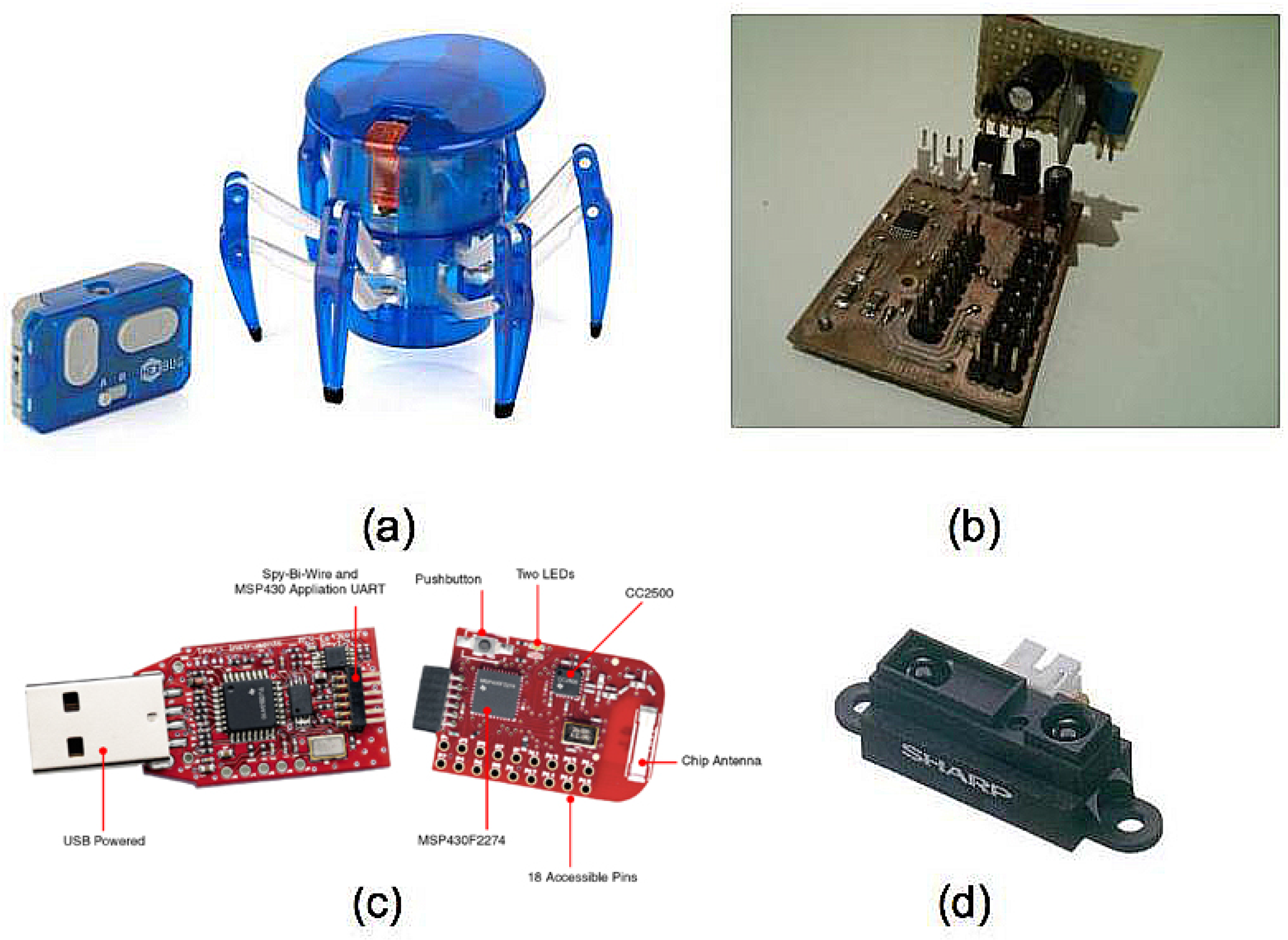
4.3. Tests with Real Robots
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| BDA | backbone dispersion algorithm |
| SPF | social potential fields |
| RSS | received signal strength |
| RF | Radiofrequency |
References
- Robinson, J.; Ng, E.; Robinson, J. A Performance Study of Deployment Factors in Wireless Mesh Networks. In Proceedings of the IEEE Infocom—26th IEEE International Conference on Computer Communications, Anchorage, AK, USA, 6–12 May 2007; pp. 2054–2062.
- Curiac, D.I. Towards wireless sensor, actuator and robot networks: Conceptual framework, challenges and perspectives. J. Netw. Comput. Appl. 2016, 63, 14–23. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network Survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Mei, Y.; Xian, C.; Das, S.; Hu, Y.C.; Lu, Y.H. Repairing Sensor Networks Using Mobile Robots. In Proceedings of the ICDCS International Workshop on Wireless Ad hoc and Sensor Networks (IEEE WWASN 2006), Lisboa, Portugal, 4–7 July 2006.
- Howard, A.; Mataric, M.; Sukhatme, G. An incremental self-deployment algorithm for mobile sensor networks. Auton. Robots 2002, 13, 113–126. [Google Scholar] [CrossRef]
- Mesmoudi, A.; Feham, M.; Labraoui, N. Wireless Sensor Networks Localization Algorithms: A Comprehensive Survey. Int. J. Comput. Netw. Commun. 2013, 5, 45. [Google Scholar] [CrossRef]
- Hattori, K.; Tatebe, N.; Kagawa, T.; Owada, Y.; Hamaguchi, A. Autonomous deployment algorithm for resilient mobile mesh networks. In Proceedings of the Asia-Pacific Microwave Conference, Sendai, Japan, 4–7 November 2014; pp. 662–664.
- Othman, S.N. Node positioning in zigbee network using trilateration method based on the received signal strength indicator (RSSI). Eur. J. Sci. Res. 2010, 46, 048–061. [Google Scholar]
- Deif, D.S.; Gadallah, Y. Classification of Wireless Sensor Networks Deployment Techniques. IEEE Commun. Surv. Tutor. 2014, 16, 834–855. [Google Scholar] [CrossRef]
- Senouci, M.R.; Mellouk, A.; Asnoune, K.; Bouhidel, F.Y. Movement-Assisted Sensor Deployment Algorithms: A Survey and Taxonomy. IEEE Commun. Surv. Tutor. 2015, 17, 2493–2510. [Google Scholar] [CrossRef]
- Younis, M.; Akkaya, K. Strategies and Techniques for Node Placement in Wireless Sensor Networks: A Survey. Ad Hoc Netw. 2008, 6, 621–655. [Google Scholar] [CrossRef]
- Ferentinos, K.P.; Tsiligiridis, T.A. Adaptive design optimization of wireless sensor networks using genetic algorithms. Comput. Netw. 2007, 51, 1031–1051. [Google Scholar] [CrossRef]
- Kukunuru, N.; Thella, B.R.; Davuluri, R.L. Sensor deployment using particle swarm optimization. Int. J. Eng. Sci. Technol. 2010, 2, 5395–5401. [Google Scholar]
- Kulkarni, R.V.; Venayagamoorthy, G.K. Particle Swarm Optimization in Wireless-Sensor Networks: A Brief Survey. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2011, 41, 262–267. [Google Scholar] [CrossRef]
- Han, X. Mobile node deployment based on improved probability model and dynamic particle swarm algorithm. J. Netw. 2014, 9, 131–137. [Google Scholar] [CrossRef]
- Ozturk, C.; Karaboga, D.; Gorkemli, B. Probabilistic dynamic deployment of wireless sensor networks by artificial bee colony algorithm. Sensors 2011, 11, 6056–6065. [Google Scholar] [CrossRef] [PubMed]
- Du, H.; Xia, N.; Zheng, R. Particle Swarm Inspired Underwater Sensor Self-Deployment. Sensors 2014, 14, 15262–15281. [Google Scholar] [CrossRef] [PubMed]
- Bartolini, N.; Calamoneri, T.; Fusco, E.G.; Massini, A.; Silvestri, S. Push & Pull: Autonomous deployment of mobile sensors for a complete coverage. Wirel. Netw. 2010, 16, 607–625. [Google Scholar]
- Jensen, E.; Gini, M. Rolling Dispersion for Robot Teams. In Proceedings of the IJCAI Twenty-Third International Joint Conference on Artificial Intelligence, Beijing, China, 3–9 August 2013.
- Chen, J.; Li, S.; Sun, Y. Novel deployment schemes for mobile sensor networks. Sensors 2007, 7, 2907–2919. [Google Scholar] [CrossRef]
- Zhang, C.; Fei, S. Connectivity-Preserved and Force-Based Deployment Scheme for Mobile Sensor Network. Wirel. Pers. Commun. 2013, 77, 463–475. [Google Scholar] [CrossRef]
- Özdaǧ, R.; Karcı, A. Probabilistic dynamic distribution of wireless sensor networks with improved distribution method based on electromagnetism-like algorithm. Measurement 2016, 79, 66–76. [Google Scholar] [CrossRef]
- Damer, S.; Ludwig, L.; LaPoint, M.A.; Gini, M.; Papanikolopoulos, N.; Budenske, J. Dispersion and exploration algorithms for robots in unknown environments. In Proceedings of the SPIE Unmanned Systems Technology VIII, Orlando, FL, USA, 17 April 2006.
- Reif, J.H.; Wang, H. Social Potential Fields: A Distributed Behavioral Control for Autonomous Robots. Robot. Auton. Syst. 1999, 27, 171–194. [Google Scholar] [CrossRef]
- Ludwig, L.; Gini, M. Robotic Swarm Dispersion Using Wireless Intensity Signals. Distrib. Auton. Robot. Syst. 2006, 7, 135–144. [Google Scholar]
- Aamodt, K. CC2431 Location Engine. Application Note AN042 (Rev. 1.0), SWRA095; Texas Instruments: Dallas, TX, USA, 2006; Volume 2, pp. 2–4. [Google Scholar]
- Gage, D.W. Command Control for Many-Robot Systems; Research Development Test and Evaluation Division Naval Command Control and Ocean Surveillance Center: San Diego, CA, USA, 1992. [Google Scholar]
- Ghosh, A.; Das, S.K. Review: Coverage and Connectivity Issues in Wireless Sensor Networks: A Survey. Pervasive Mob. Comput. 2008, 4, 303–334. [Google Scholar] [CrossRef]
- Heo, N.; Varshney, P.K. A Distributed Self Spreading Algorithm for Mobile Wireless Sensor Networks. IEEE Wirel. Commun. Netw. 2003, 3, 1597–1602. [Google Scholar]
- The Player/Stage project. Available online: http://playerstage.sourceforge.net/ (accessed on 6 July 2016).
- Gerkey, B.P.; Vaughan, R.T.; Howard, A. The Player/Stage Project: Tools for Multi-Robot and Distributed Sensor Systems. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003; pp. 317–323.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Dply | Obst | C | U | Unbalance | ||||
|---|---|---|---|---|---|---|---|---|---|
| 20 | BDA | N | 2 min 3 s | 2.140 | 79.33% | 0.578 | 0.052 | 34.8 % | 6.73 |
| 20 | BDA | Y | 3 min 8 s | 3.218 | 76.78% | 0.574 | 0.051 | 32.5% | 4.46 |
| 100 | BDA | N | 6 min 48 s | 30.077 | 58.13 % | 0.533 | 0.125 | 34.7 % | 28.76 |
| 100 | BDA | Y | 7 min 31 s | 40.145 | 59.86 % | 0.545 | 0.11 | 34.7% | 33.36 |
| 20 | SPF | N | 1 min 6 s | 1.698 | 95.11 % | 0.706 | 0.071 | 32.7% | 2.62 |
| 20 | SPF | Y | 1 min 22 s | 2.078 | 99.55 % | 0.783 | 0.080 | 36.9% | 4.6 |
| 100 | SPF | N | 2 min 38 s | 18.499 | 93.67 % | 0.727 | 0.225 | 42.8% | 10.3 |
| 100 | SPF | Y | 2 min 57 s | 19.57 | 90.84 % | 0.711 | 0.215 | 42.7% | 9.75 |
| N | Dply | Obst | C | U | Unbalance | ||||
|---|---|---|---|---|---|---|---|---|---|
| 4 | BDA | N | 40 s | 0.91 | 52% | 0.57 | 0.025 | 37% | 3 |
| 3 | SPF | N | 30 s | 1,12 | 59.7 % | 0.79 | 0.041 | 27.2% | 2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urdiales, C.; Aguilera, F.; González-Parada, E.; Cano-García, J.; Sandoval, F. Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks. Sensors 2016, 16, 1047. https://doi.org/10.3390/s16071047
Urdiales C, Aguilera F, González-Parada E, Cano-García J, Sandoval F. Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks. Sensors. 2016; 16(7):1047. https://doi.org/10.3390/s16071047
Chicago/Turabian StyleUrdiales, Cristina, Francisco Aguilera, Eva González-Parada, Jose Cano-García, and Francisco Sandoval. 2016. "Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks" Sensors 16, no. 7: 1047. https://doi.org/10.3390/s16071047
APA StyleUrdiales, C., Aguilera, F., González-Parada, E., Cano-García, J., & Sandoval, F. (2016). Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks. Sensors, 16(7), 1047. https://doi.org/10.3390/s16071047