
A Cyber-Physical System for Girder Hoisting Monitoring Based on Smartphones



Abstract
:
1. Introduction
- An iPhone-based monitoring system is developed; this system uses smartphones equipped with internal sensors to obtain girder movement information, which will be uploaded to a server, and then return to controller users.
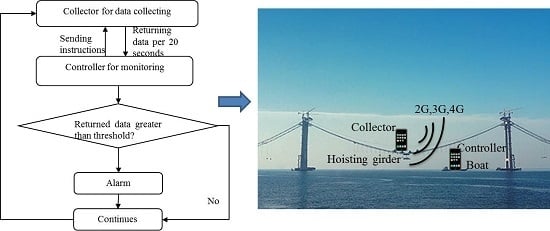
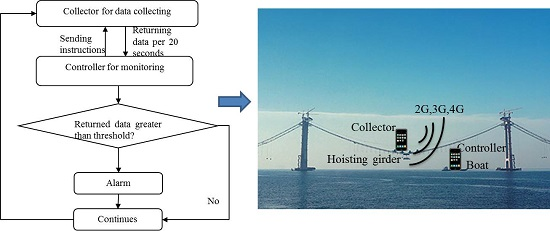
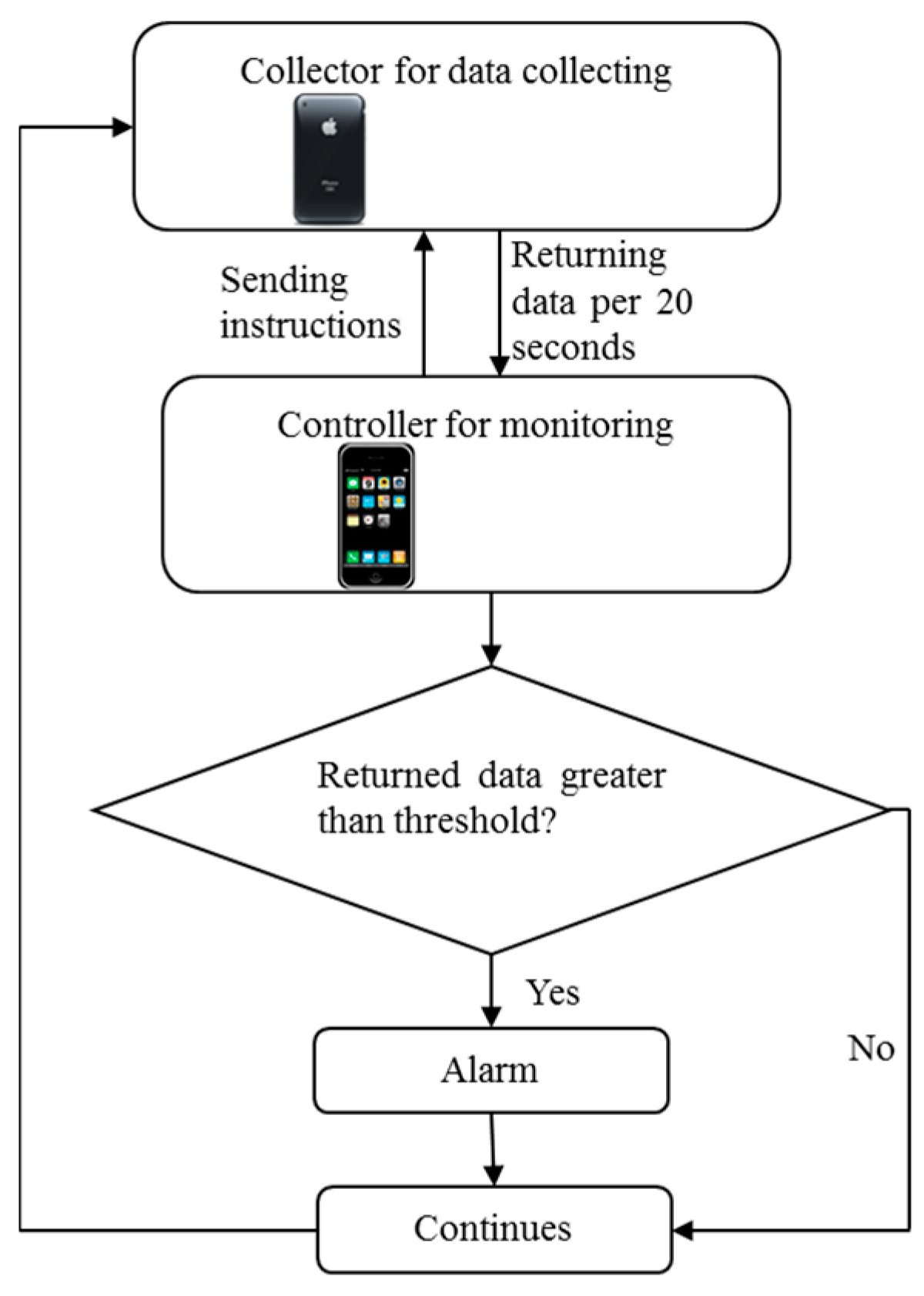
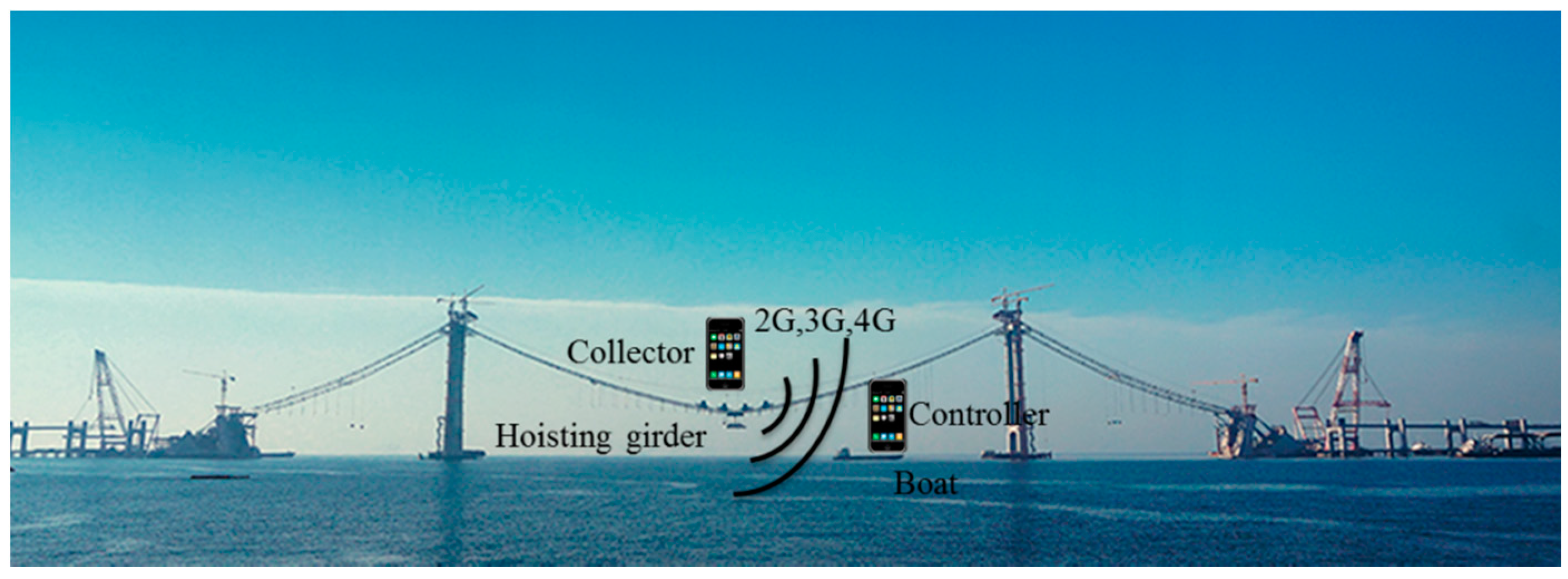
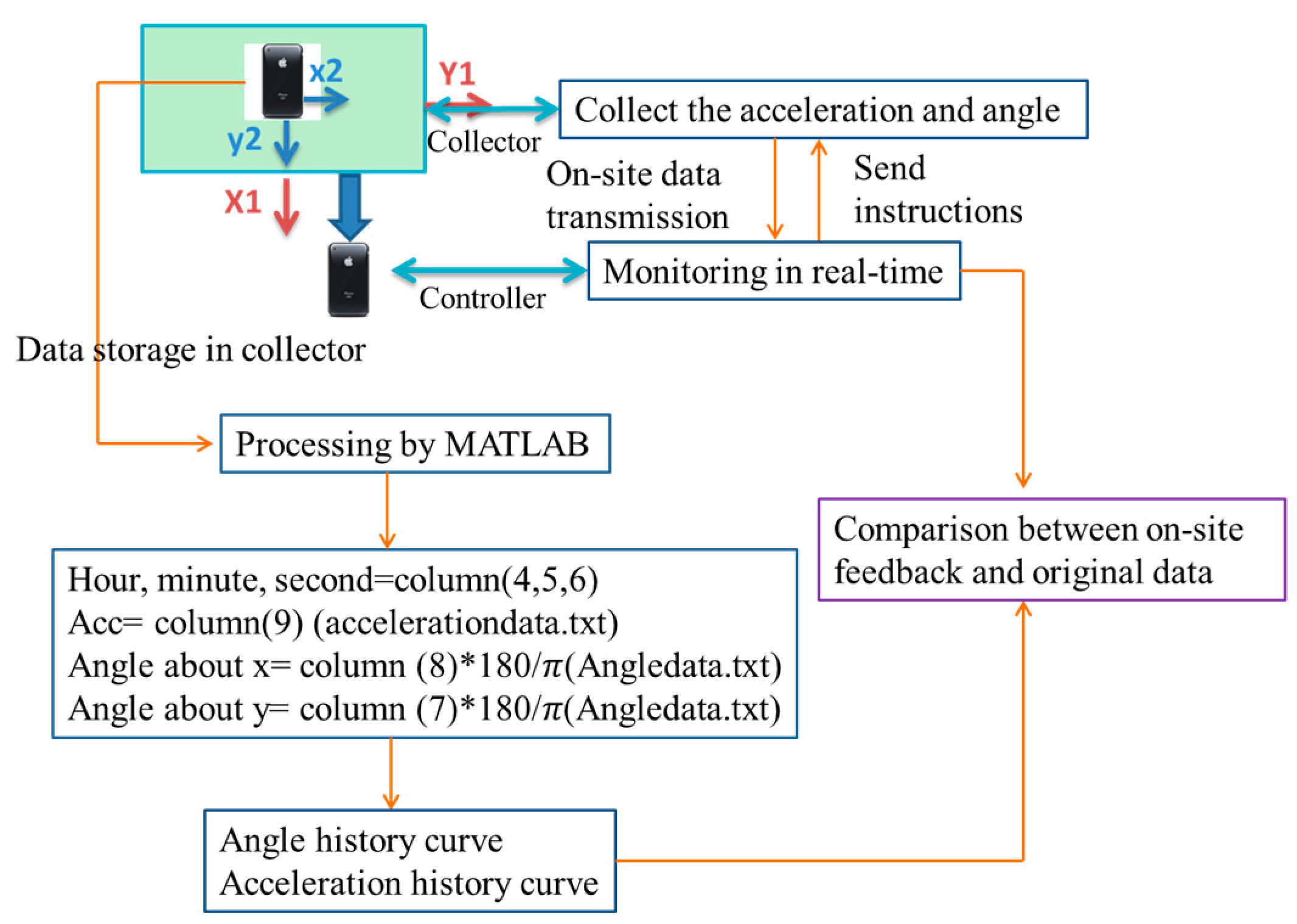
- The system consists of a controller and collectors. The controller can send instruments to the collector to control the state of collector, it can also receive monitoring and warning information from the collector in real-time.
- An alarming function is designed, and once the returned data exceeds a threshold, an alarm will appear on the controller iPhone.
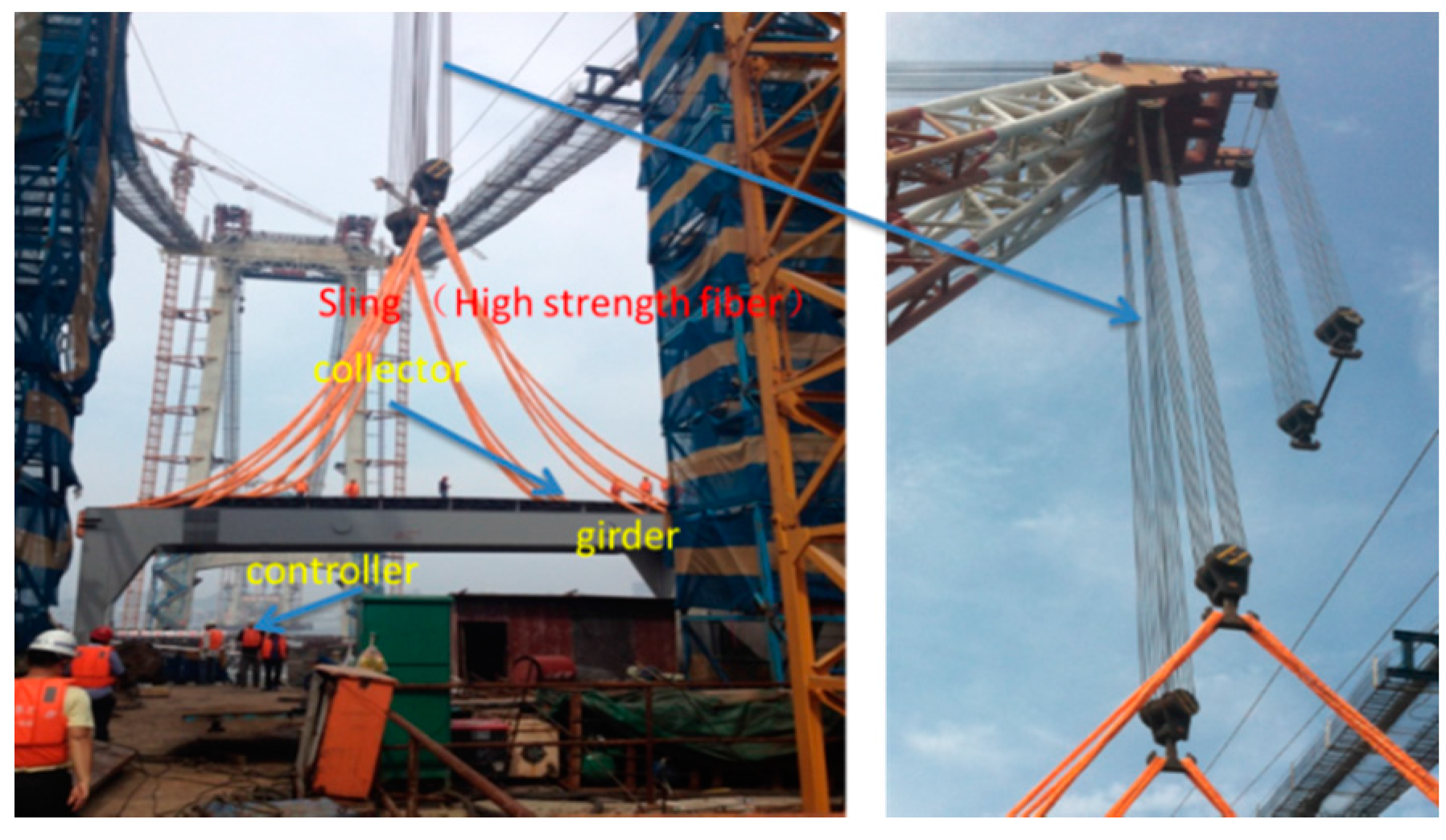
- The proposed system is used to monitor the movement and orientation of a girder during hoisting on a cross-sea bridge. The site monitoring results validate the data acquisition, data transmission, commands control and alarming functions. This CPS using smartphones and wireless networks in hoisting monitoring can provide more field conditions for operators and help them take corresponding measures to ensure safety.
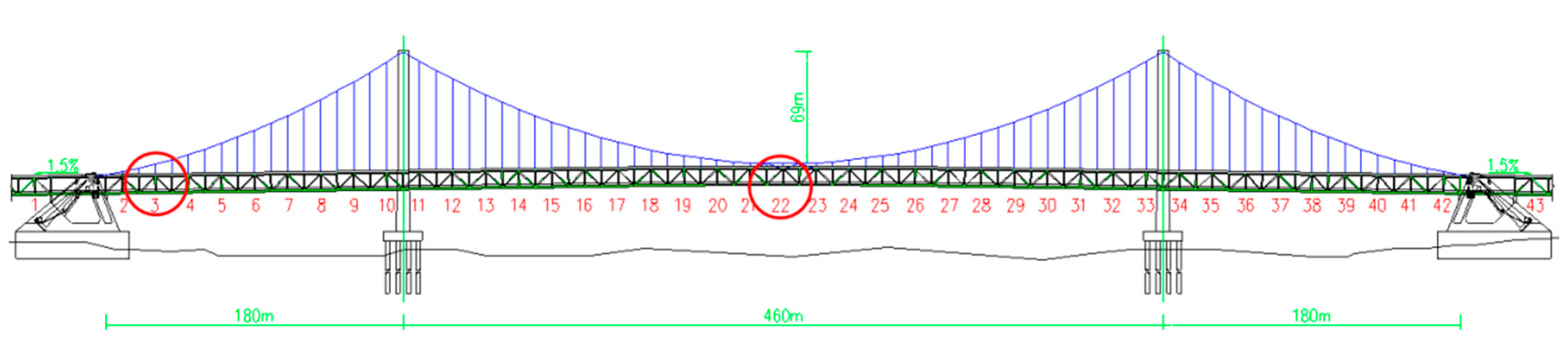
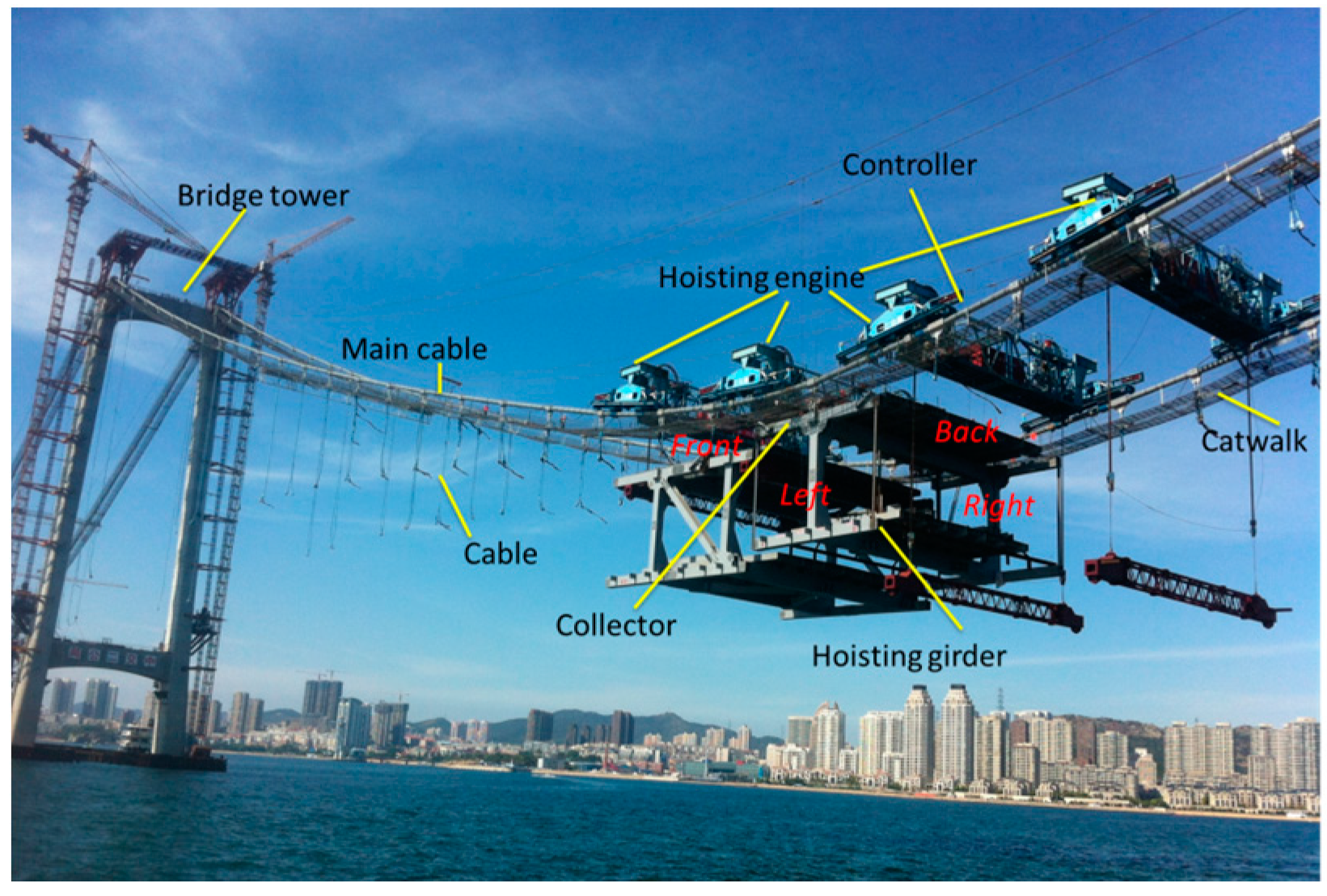
2. Engineering Description
3. Hoisting Monitoring System
3.1. Monitoring System Design
3.2. Sensor Subsystem
3.2.1. Sensor Parameters
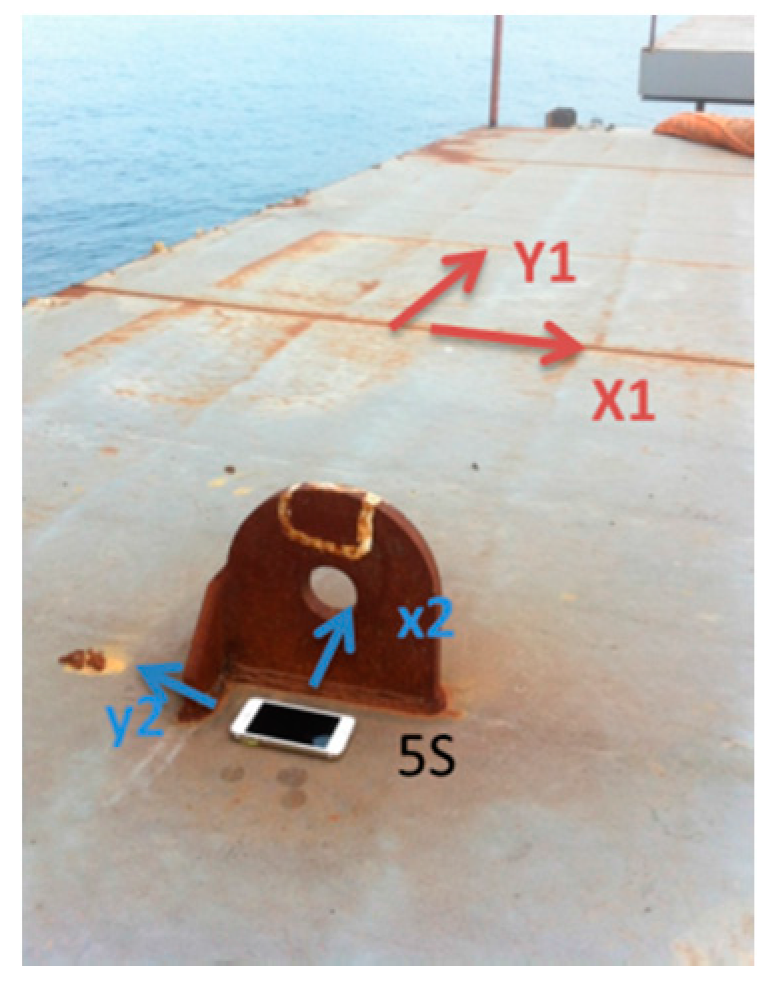
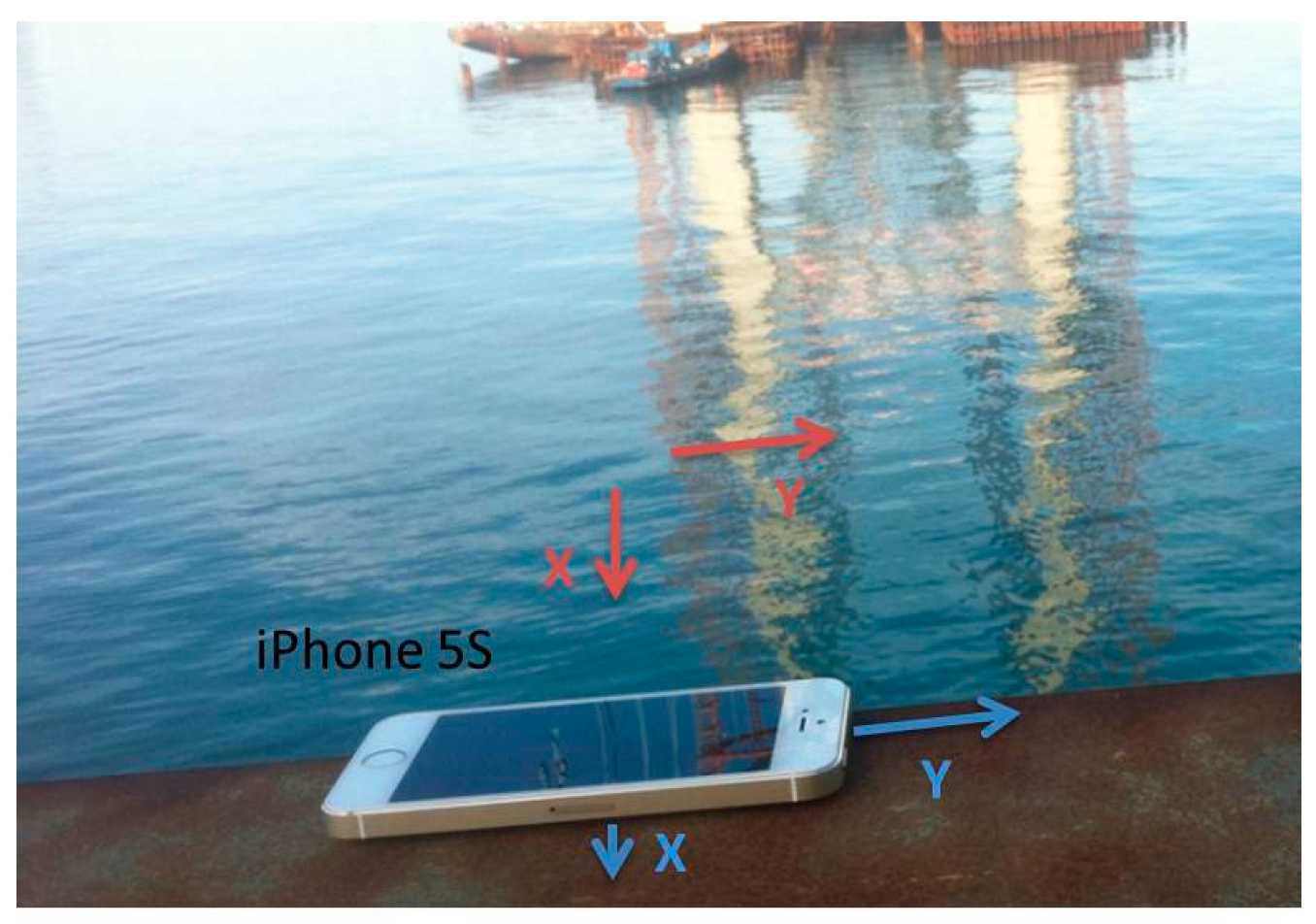
3.2.2. Calibration of Angle
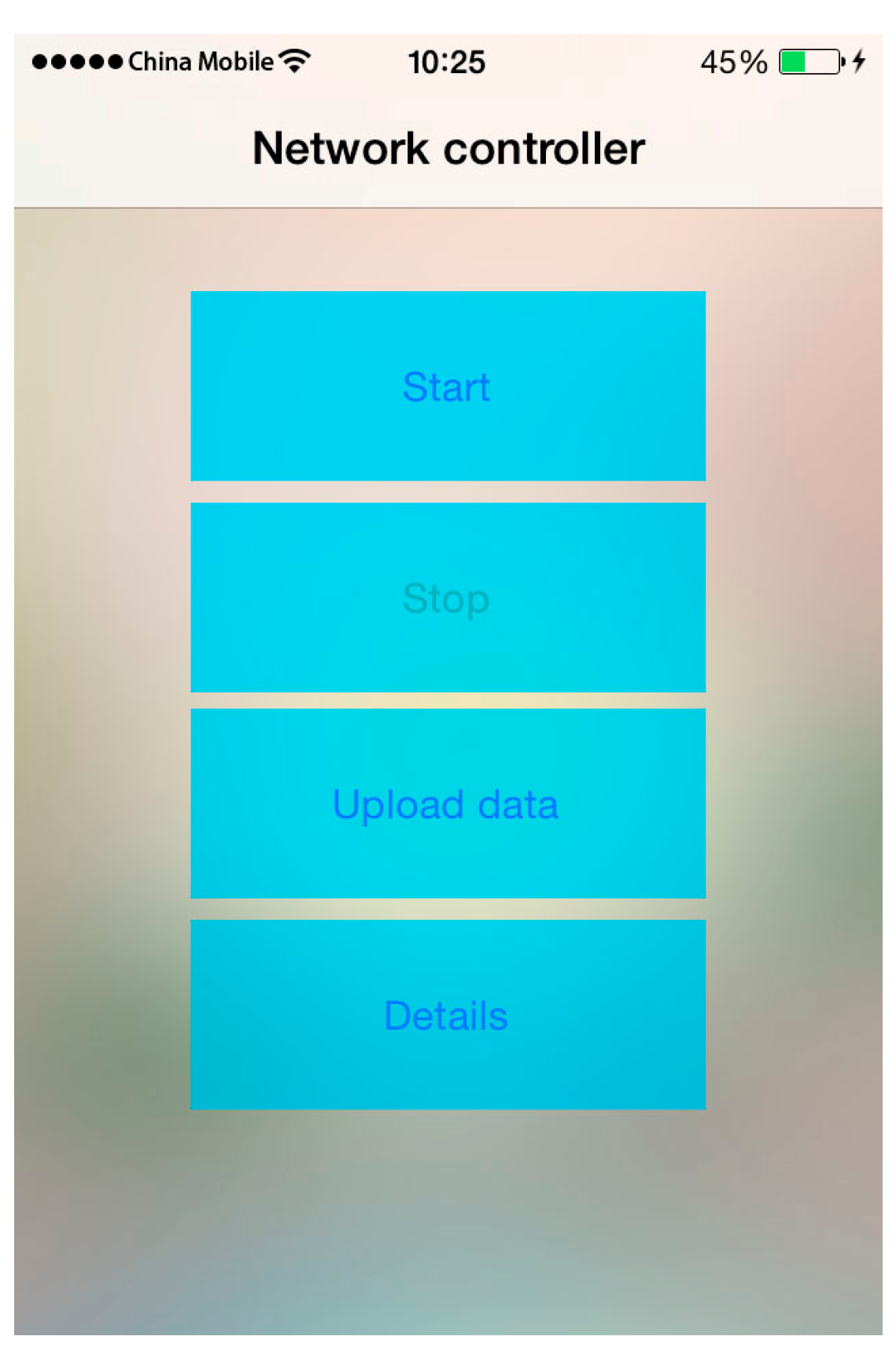
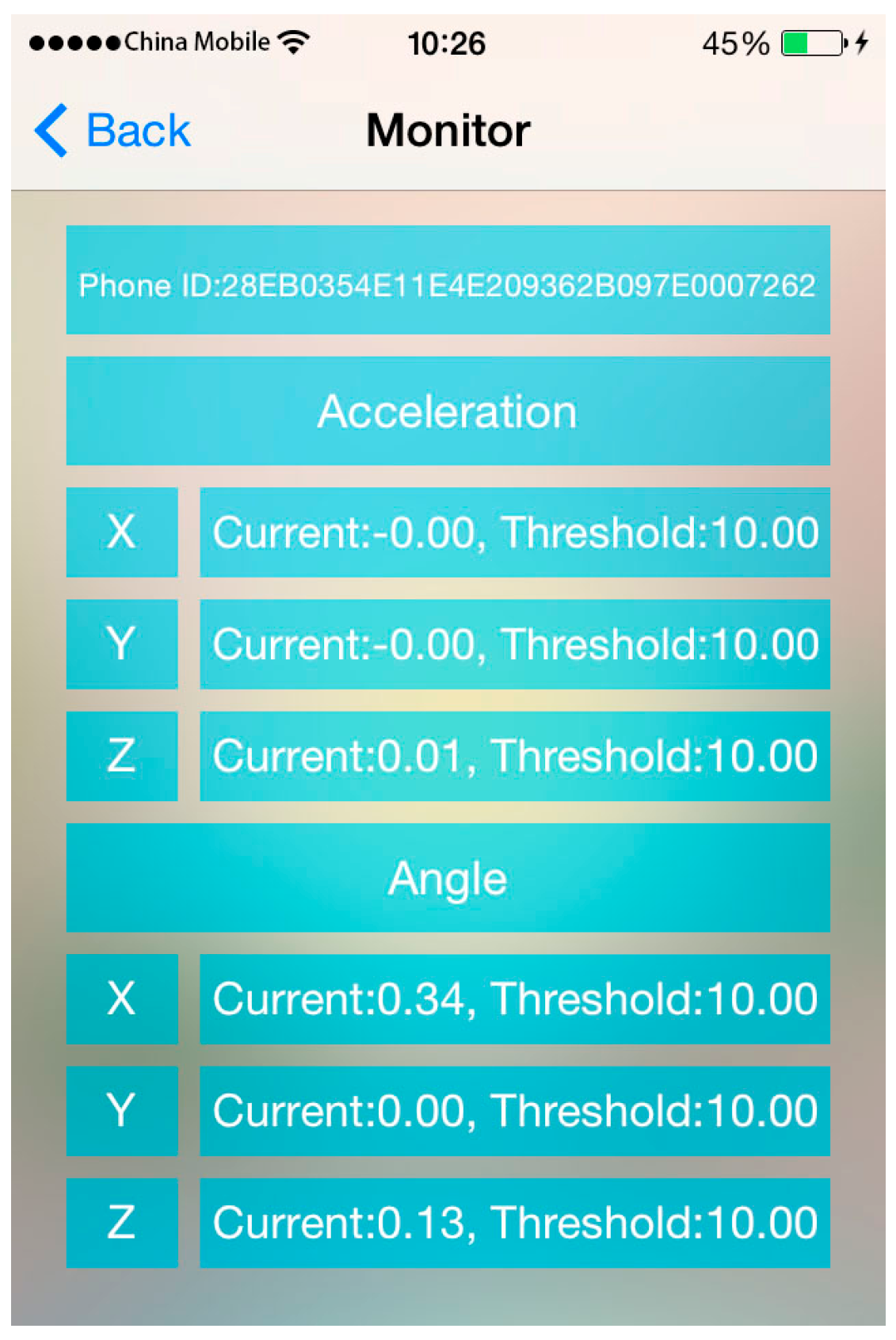
3.3. Controller Program
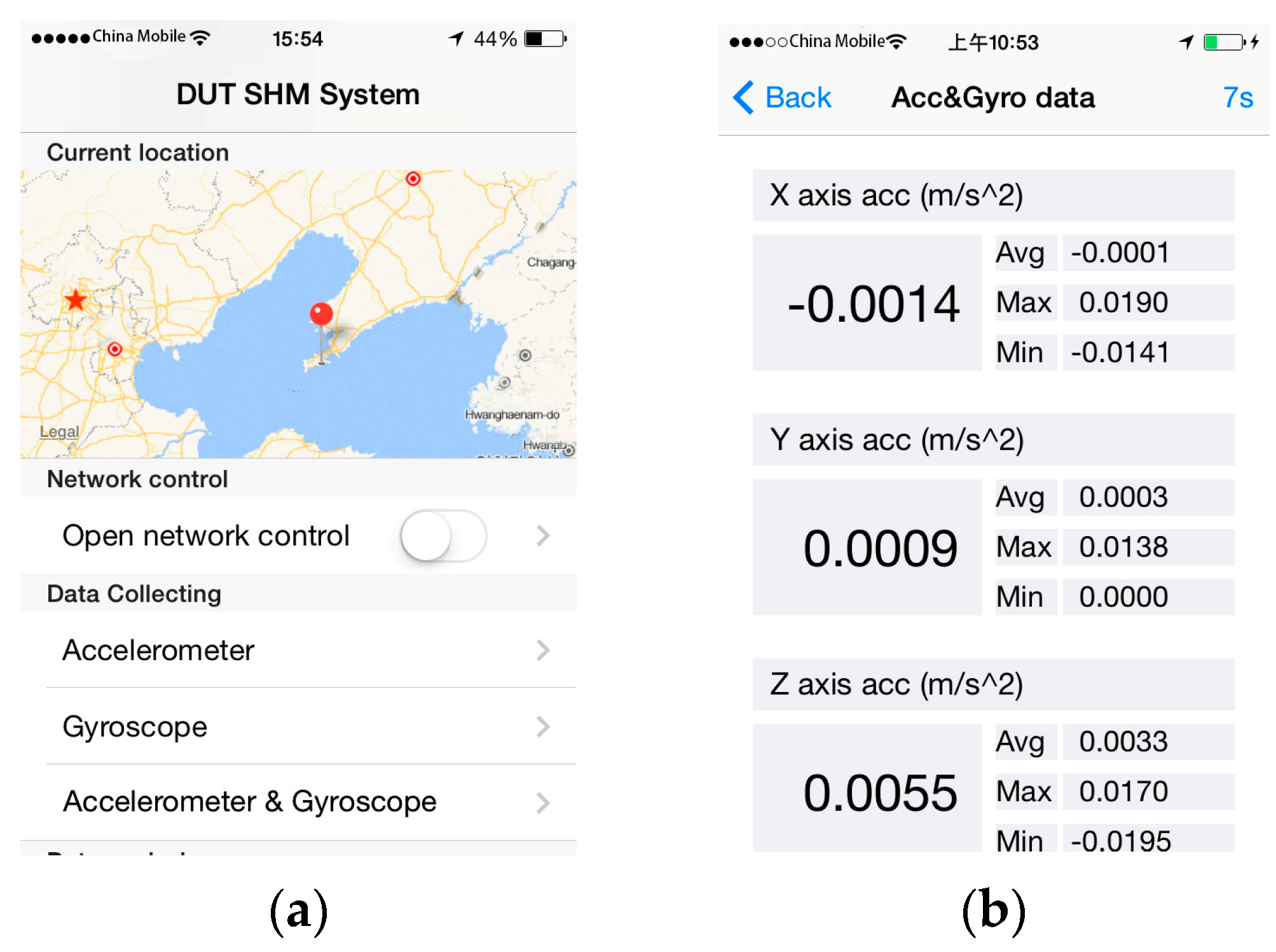
3.4. Collector Program
3.5. Application of the Proposed System for Monitoring a Hoisting Operation
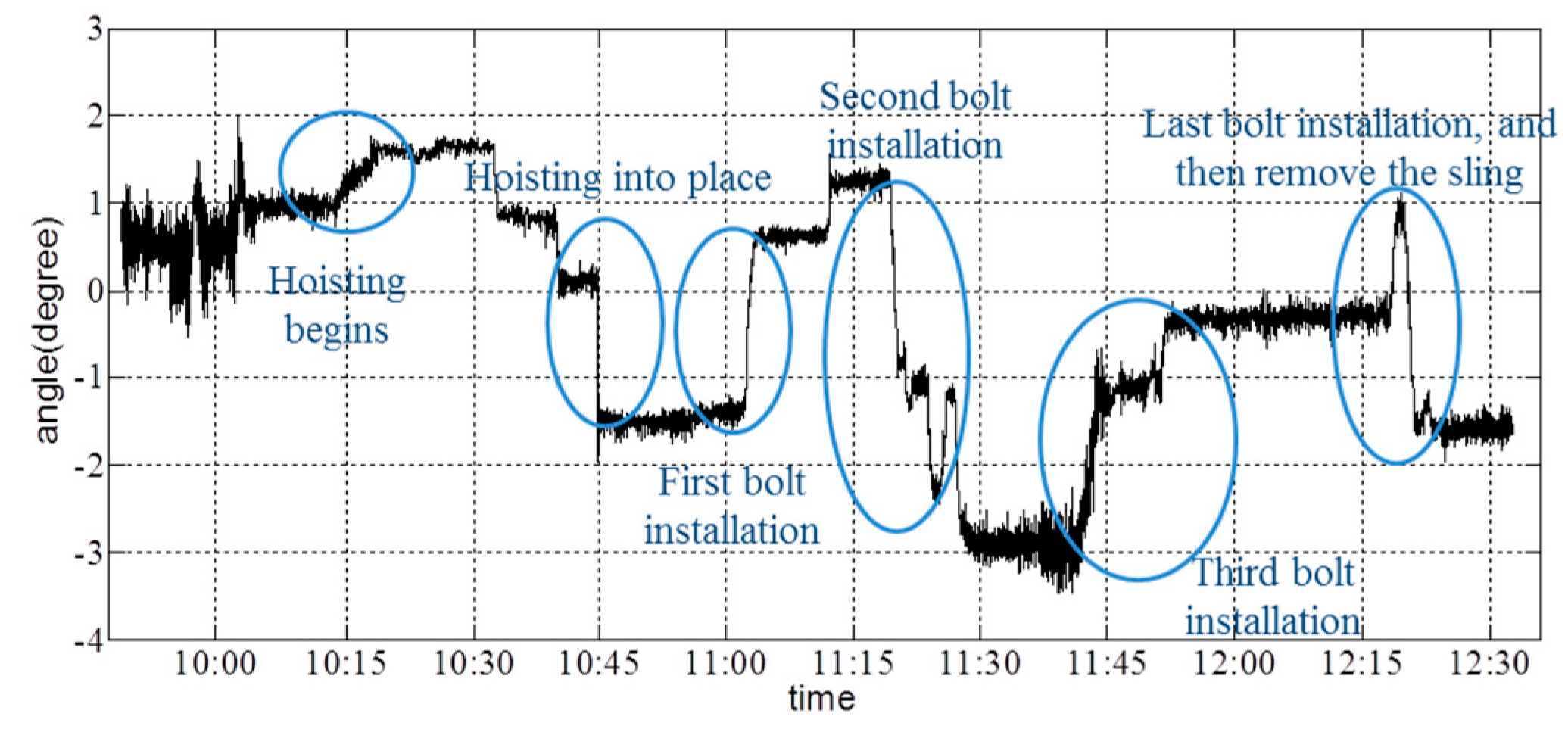
4. Monitoring of Side-Span Hoisting Procedure
4.1. Monitoring Process
4.2. Related Algorithm
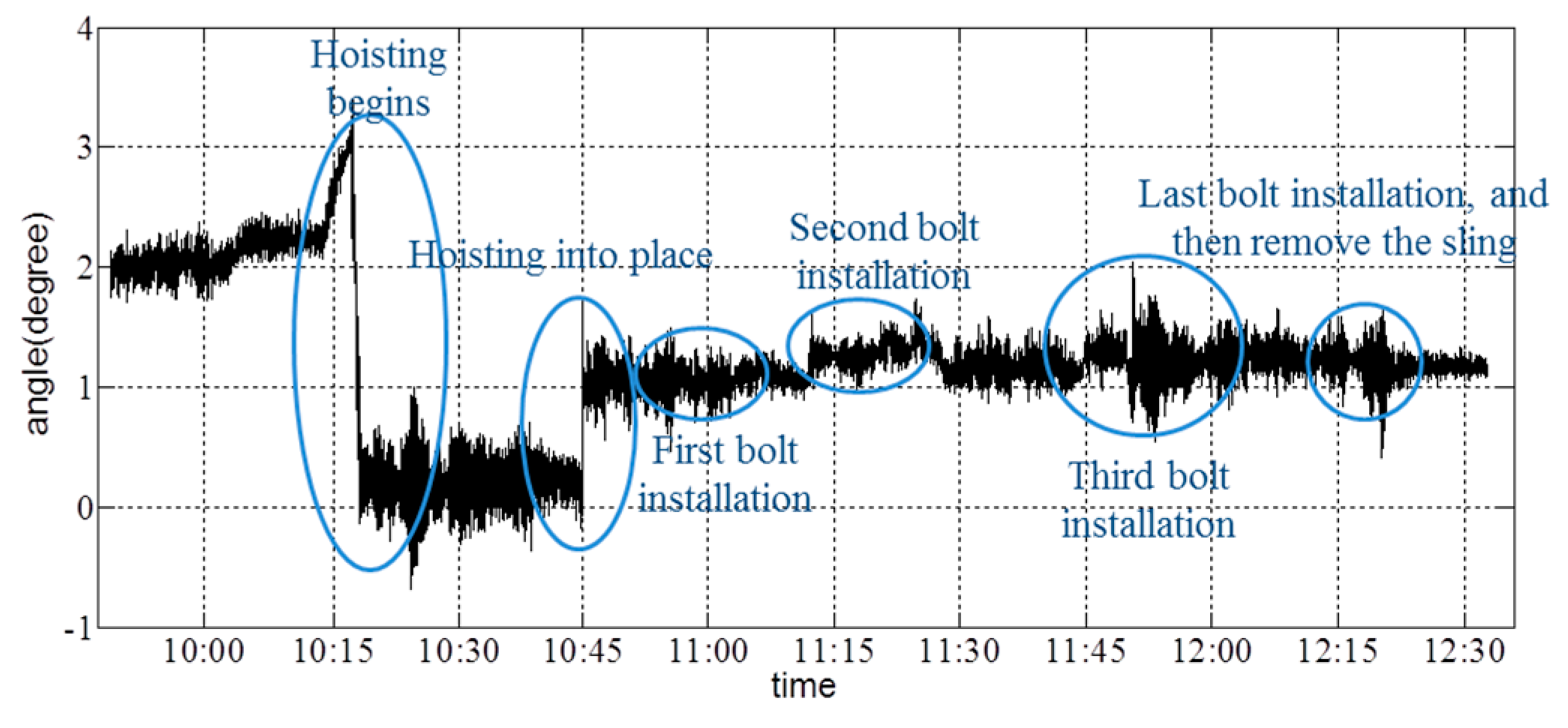
4.3. Test Results
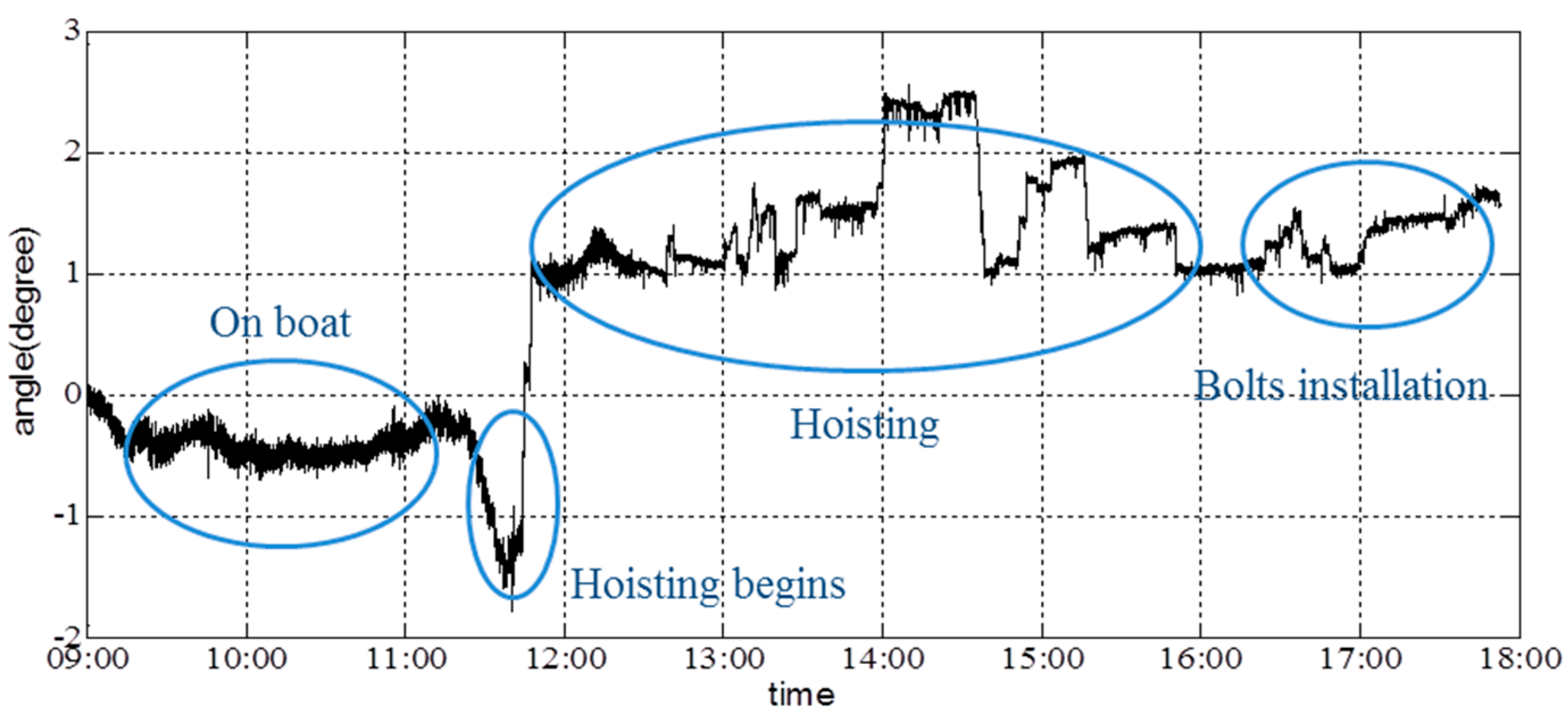
5. Monitoring of a Middle-Span Hoisting Procedure
5.1. Monitoring Process
5.2. Related Algorithm
5.3. Test Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dong, M.; Ota, K.; Yang, L.; Liu, A.; Guo, M. LSCD: A low-storage clone detection protocol for cyber-physical systems. IEEE Trans. Comput. Aided des. Integr. Circuits Syst. 2016, 35, 712–723. [Google Scholar] [CrossRef]
- Ganti, R.; Tsai, Y.; Abdelzaher, T. Senseworld: Towards Cyber-Physical Social Networks. In Proceedings of the IEEE Computer Society 7th International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008; pp. 563–564.
- Liu, X.; Dong, M.; Ota, K.; Huang, P.; Liu, A. Service Pricing Decision in Cyber-Physical Systems: Insights from Game Theory. IEEE Trans. Serv. Comput. 2016, 9, 186–198. [Google Scholar] [CrossRef]
- El Baz, D. IoT and the Need for High Performance Computing. In Proceeding of the 2014 International Conference on Identification, Information and Knowledge in the Internet of Things, Beijing, China, 17–18 October 2014; pp. 1–6.
- Wan, J.; Yan, H.; Suo, H.; Li, F. Advances in cyber-physical systems research. KSII Trans. Int. Inf. Syst. 2011, 5, 1891–1908. [Google Scholar] [CrossRef]
- Wan, J.; Yan, H.; Liu, Q.; Zhou, K.; Lu, R.; Li, D. Enabling cyber-physical systems with machine-to-machine technologies. Int. J. Ad Hoc Ubiquitous Comput. 2013, 13, 187–196. [Google Scholar] [CrossRef]
- Wan, J.; Yan, H.; Li, D.; Zhou, K.; Zeng, L. Cyber-Physical Systems for Optimal Energy Management Scheme of Autonomous Electric Vehicle. Comput. J. 2013, 56, 947–956. [Google Scholar] [CrossRef]
- Wu, F.; Kao, Y.; Tseng, Y. From wireless sensor networks towards cyber physical systems. Pervasive Mob. Comput. 2011, 7, 397–413. [Google Scholar] [CrossRef]
- Lau, S.L.; König, I.; David, K.; Parandian, B.; Carius-Düssel, C.; Schultz, M. Supporting Patient Monitoring Using Activity Recognition with a Smartphone. In Proceedings of 2010 7th International Symposium on Wireless Communication Systems (ISWCS), New York, NY, USA, 19–22 September 2010; pp. 810–814.
- Wan, J.; Zhang, D.; Sun, Y.; Lin, K.; Zou, C.; Cai, H. VCMIA: A Novel Architecture for Integrating Vehicular Cyber-Physical Systems and Mobile Cloud Computing. Mob. Netw. Appl. 2014, 19, 153–160. [Google Scholar] [CrossRef]
- Li, W.; Lin, Y.; Ye, S. Shock Detection with smart mobile phone and its application in car accident self-rescue. Comput. Eng. 2011, 37, 245–247. [Google Scholar]
- Ketabdar, H.; Polzehl, T. Fall and Emergency Detection with Mobile Phones. In Proceedings of the 11th International ACM SIGACCESS Conference on Computers and Accessibility, Pittsburgh, PA, USA, 25–28 October 2009; pp. 241–242.
- Mladenov, M.; Mock, M. A Step Counter Service for Java-Enabled Devices Using a Built-in Accelerometer. In Proceedings of the 1st International Workshop on Context-Aware Middleware and Services: Affiliated with the 4th International Conference on Communication System Software and Middleware (COMSWARE 2009), Dublin, Ireland, 16 June 2009; pp. 1–5.
- Brezmes, T.; Gorricho, J.L.; Cotrina, J. Activity recognition from accelerometer data on a mobile phone. In Distributed Computing, Artificial Intelligence, Bioinformatics, Soft Computing, and Ambient Assisted Living; Springer: Berlin/Heidelberg, Germany, 2009; pp. 796–799. [Google Scholar]
- Lau, S.L.; David, K. Movement Recognition Using the Accelerometer in Smartphones. In Proceedings of the IEEE 2010 Future Network and Mobile Summit, Florence, Italy, 16–18 June 2010; pp. 1–9.
- Morgenthal, G.; Höpfner, H. The application of smartphones to measuring transient structural displacements. J. Civ. Struct. Health Monit. 2012, 2, 149–161. [Google Scholar] [CrossRef]
- Höpfner, H.; Morgenthal, G.; Schirmer, M.; Naujoks, M.; Halang, C. On measuring mechanical oscillations using smartphone sensors: Possibilities and limitation. In ACM SIGMOBILE Mobile Computing and Communications Review; ACM: New York, NY, USA, 2013; Volume 17, pp. 29–41. [Google Scholar]
- Reill, J.; Shideh, D.; Ervasti, M.; Bray, J.D.; Glaser, S.D.; Bayen, A.M. Mobile phones as seismologic sensors: Automating data extraction for the iShake system. IEEE Trans. Autom. Sci. Eng. 2013, 10, 242–251. [Google Scholar] [CrossRef]
- Kotsakos, D.; Sakkos, P.; Kalogeraki, V.; Gunopulos, D. Smart Monitor: Using smart devices to perform structural health monitoring. Proc. VLDB Endow. 2013, 6, 1282–1285. [Google Scholar] [CrossRef]
- Yi, W.J.; Gilliland, S.; Saniie, J. Wireless Sensor Network for Structural Health Monitoring Using System-on-Chip with Android Smartphone. In Proceedings of the 2013 IEEE Sensors, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4.
- Sharma, A.; Gupta, D. Smartphone as a real-time and participatory data collection tool for civil engineers. Int. J. Mod. Comput. Sci. 2014, 2, 22–27. [Google Scholar]
- Oraczewski, T.; Staszewski, W.J.; Uhl, T. Nonlinear acoustics for structural health monitoring using mobile, wireless and smartphone-based transducer platform. J. Intell. Mater. Syst. Struct. 2016, 27, 786–796. [Google Scholar] [CrossRef]
- Feng, M.; Fukuda, Y.; Mizuta, M.; Ozer, E. Citizen sensors for SHM: Use of accelerometer data from Smartphones. Sensors 2015, 15, 2980–2998. [Google Scholar] [CrossRef] [PubMed]
- Ozer, E.; Feng, M.Q.; Feng, D. Citizen sensors for SHM: Towards a crowdsourcing platform. Sensors 2015, 15, 14591–14614. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Zhao, X.; Ou, J. A new idea: Mobile structural health monitoring using Smart phones. In Proceedings of the IEEE 2012 Third International Conference on Intelligent Control and Information Processing (ICICIP), Dalian, China, 15–17 July 2012; pp. 714–716.
- Zhao, X.; Yu, Y.; Hu, W.; Jiao, D.; Han, R.; Mao, X.; Ou, J. Cable force monitoring system of cable stayed bridges using accelerometers inside mobile smart phone. In Proceedings of the Sensors and SPIE Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, San Diego, CA, USA, 8 March 2015.
- Zhao, X.; Han, R.; Ding, Y.; Yu, Y.; Guan, Q.; Hu, W.; Li, M.; Ou, J. Portable and convenient cable force measurement using smartphone. J. Civ. Struct. Health Monit. 2015, 5, 481–491. [Google Scholar] [CrossRef]
- Yu, Y.; Han, R.; Zhao, X.; Mao, X.; Hu, W.; Jiao, D.; Li, M.; Ou, J. Initial validation of Mobile-Structural Health Monitoring method using smartphones. Int. J. Distrib. Sens. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, H.; Yu, Y.; Zhu, Q.; Hu, W.; Li, M.; Ou, J. Convenient Displacement Monitoring Technique using Smartphone. In Proceedings of the International Conference on Vibroengineering, Nanjing, China, 26–28 September 2015; pp. 579–584.
- Zhao, X.; Peng, D.; Hu, W.; Guan, Q.; Yu, Y.; Li, M.; Ou, J. Quick seismic intensity map investigation and evaluation based on cloud monitoring method using smart mobile phone. In Proceedings of the SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring, International Society for Optics and Photonics, San Diego, CA, USA, 1 April 2015.
- Peng, D.; Zhao, X.; Zhao, Q.; Yu, Y. Smartphone based public participant emergency rescue information platform for earthquake zone—“E-Explorer”. In Proceedings of the International Conference on Vibroengineering, Nanjing, China, 26–28 September 2015; pp. 436–439.
- Sun, L.; Dan, D.; Sun, Z.; Yue, Q. Health monitoring system for a cross-sea bridge in Shanghai. IABSE Symp. Rep. 2006, 92, 9–16. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer (BMA220) | Gyroscope (L3G4200D) | |
|---|---|---|
| Supply voltage | 1.62–1.98V | 2.4–3.6 V |
| Low voltage-compatible IOS | 1.8 V | 1.8 V |
| Data output | 16 bit | 16 bit |
| Selectable full scales | ±2 g/±4 g/±8 g, ±16 g | 250 dps/500 dps/2000 dps |
| Output interface | I2C/SPI | I2C/SPI |
| High shock survivability | Yes | Yes |
| Parameter | Conditions | Typical |
|---|---|---|
| Measurement range (MR) | ±2, ±4, ±8 g, ±16 g | |
| Sensitivity | ±2.0 g | 16 LSB/g |
| ±4.0 g | 8 LSB/g | |
| ±8.0 g | 4 LSB/g | |
| ±16.0 g | 2 LSB/g | |
| Sensitivity change vs. temperature | ±2.0 g | ±0.01%/°C |
| Typical zero-g offset accuracy | ±2.0 g | ±95 mg |
| Operating temperature range | −40 to +85 °C | |
| Zero-g offset temperature drift | −40 to +85 °C | ±2 mg/K |
| Bandwidths | 32, 64, 125, 250, 500, 1000 Hz |
| Parameter | Test Conditions | Type | Unit |
|---|---|---|---|
| MR | ±250, ±500, ±2000 | dps | |
| Sensitivity | MR is ±250 dps | 8.75 | mdps/digit |
| MR is ±500 dps | 17.50 | ||
| MR is ±2000 dps | 70 | ||
| Sensitivity change vs. temperature | −40 °C to +85 °C | ±2 | % |
| Digital zero-rate level | MR is ±250 dps | ±10 | dps |
| MR is ±500 dps | ±15 | ||
| MR is ±2000 dps | ±75 | ||
| Zero-rate level change vs. temperature | MR is ±250 dps | ±0.03 | dps/°C |
| MR is ±2000 dps | ±0.04 | ||
| Digital output data rate | 100, 200, 400, 800 | Hz |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, R.; Zhao, X.; Yu, Y.; Guan, Q.; Hu, W.; Li, M. A Cyber-Physical System for Girder Hoisting Monitoring Based on Smartphones. Sensors 2016, 16, 1048. https://doi.org/10.3390/s16071048
Han R, Zhao X, Yu Y, Guan Q, Hu W, Li M. A Cyber-Physical System for Girder Hoisting Monitoring Based on Smartphones. Sensors. 2016; 16(7):1048. https://doi.org/10.3390/s16071048
Chicago/Turabian StyleHan, Ruicong, Xuefeng Zhao, Yan Yu, Quanhua Guan, Weitong Hu, and Mingchu Li. 2016. "A Cyber-Physical System for Girder Hoisting Monitoring Based on Smartphones" Sensors 16, no. 7: 1048. https://doi.org/10.3390/s16071048
APA StyleHan, R., Zhao, X., Yu, Y., Guan, Q., Hu, W., & Li, M. (2016). A Cyber-Physical System for Girder Hoisting Monitoring Based on Smartphones. Sensors, 16(7), 1048. https://doi.org/10.3390/s16071048