Evaluating Degradation at Railway Crossings Using Axle Box Acceleration Measurements




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
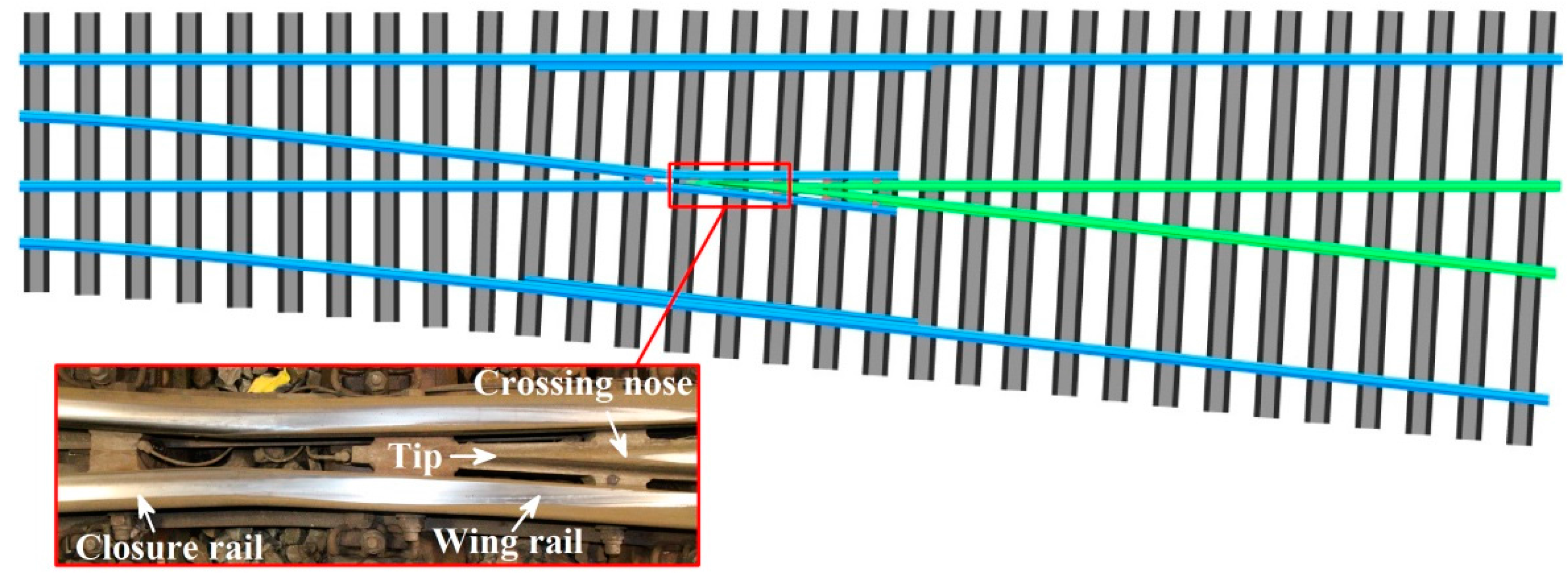
2. ABA and 3D Profile Measurements
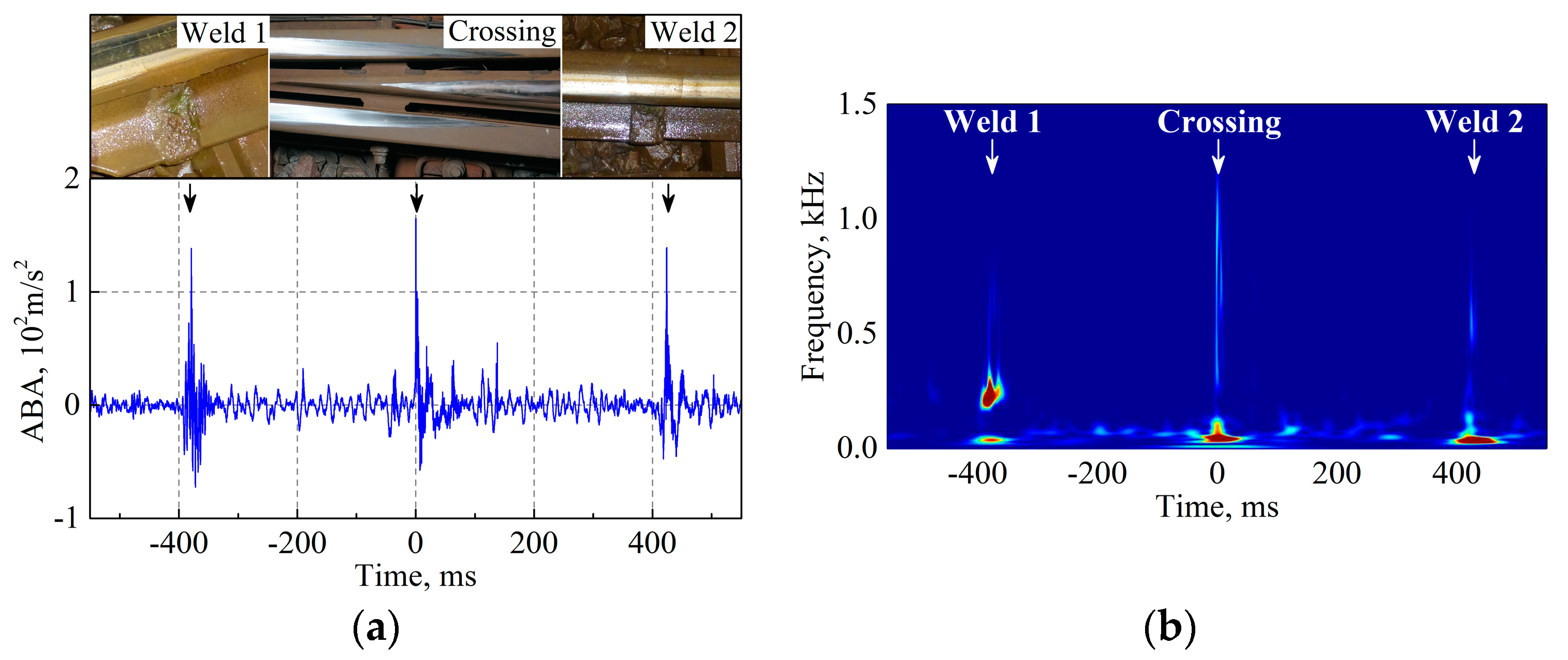
2.1. ABA Measurement
2.2. 3D Profile Measurement
3. Characteristics of ABA Related to Degradation at Crossing
3.1. Repeatability of Measured ABA
3.2. Comparison of Dynamic Response between Nominal and Degraded Crossings
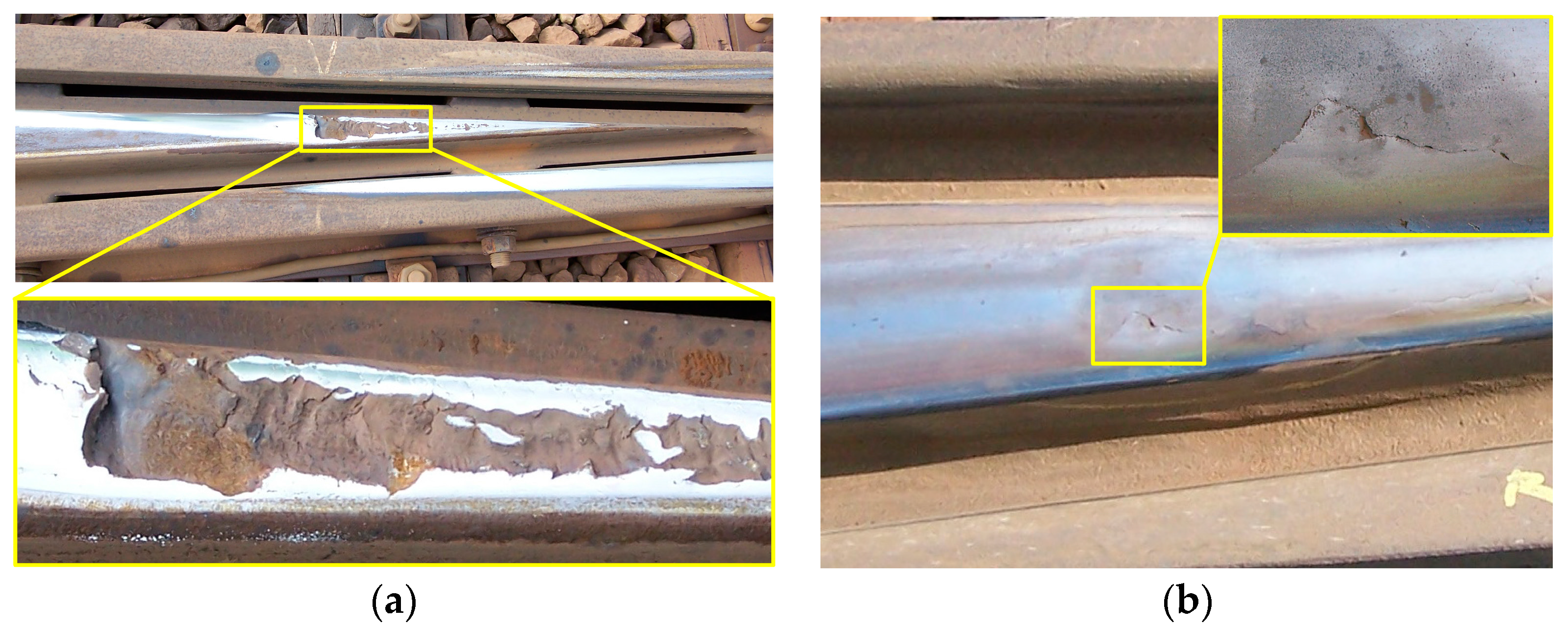
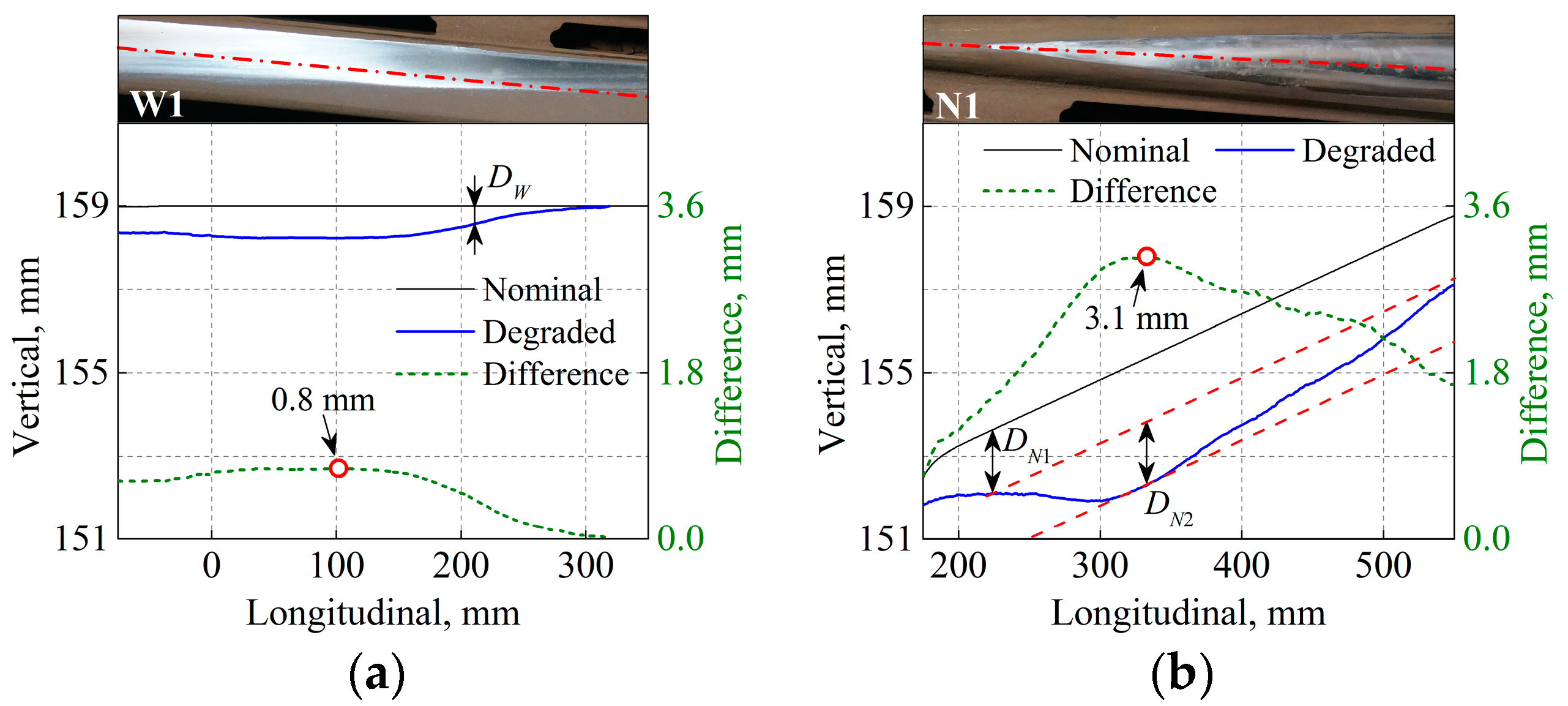
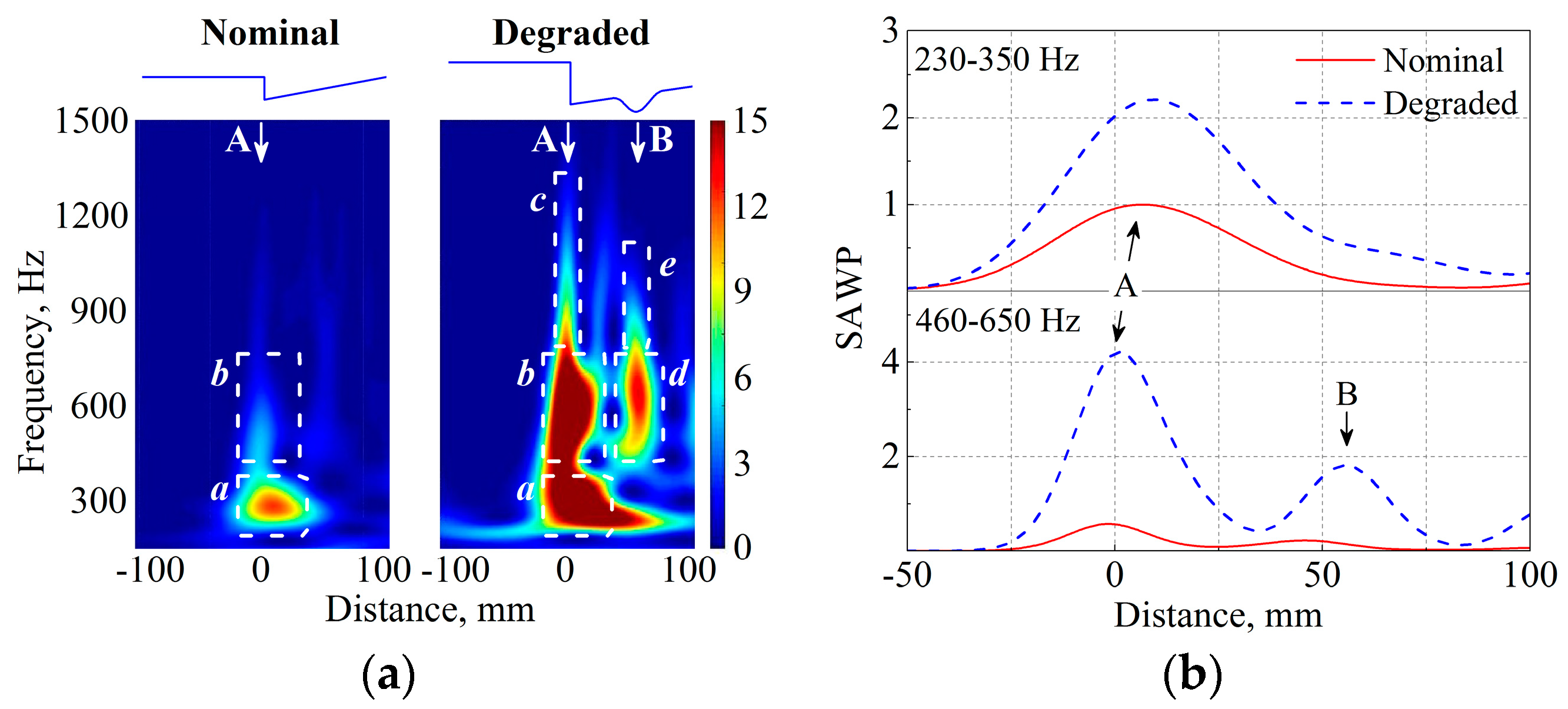
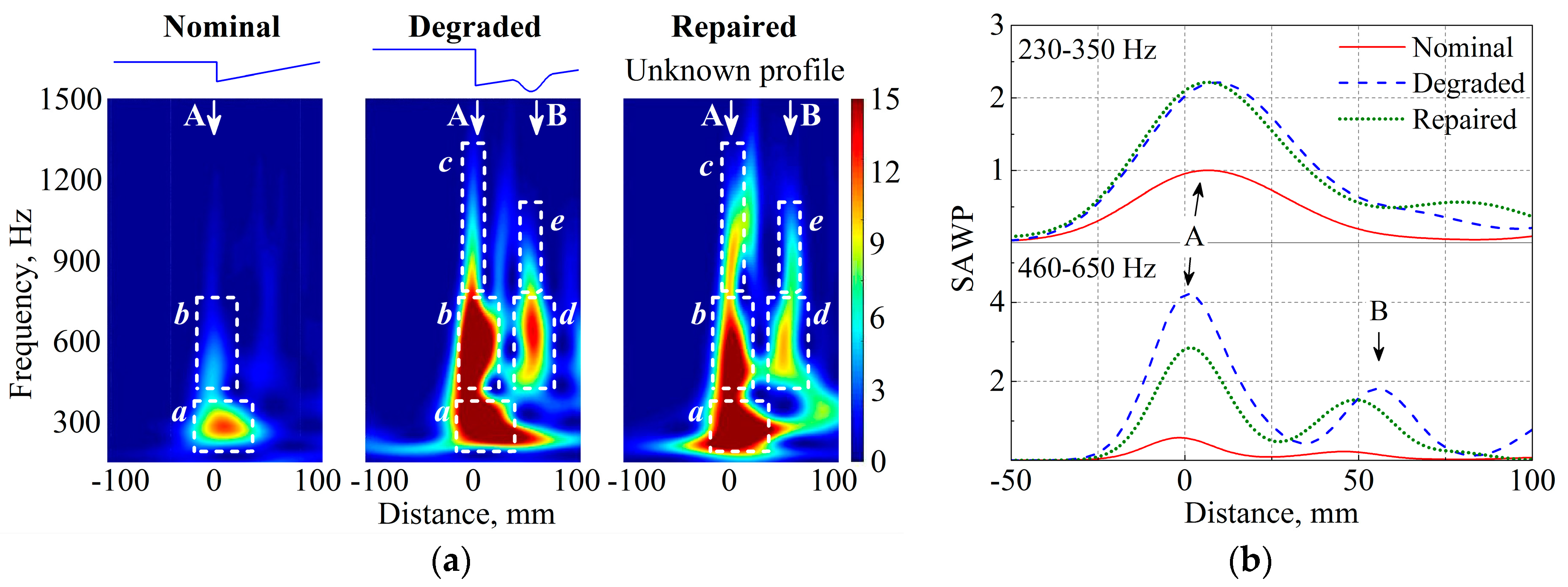
- Degradation type 1 (uneven deformation between the wing rail and the crossing nose). It exacerbates the wheel-rail impact and enlarging the energy concentrated at the characteristic frequencies of 230–350 and 460–650 Hz. The severity of the degradation can be evaluated by the values of and at the wheel-rail impact.
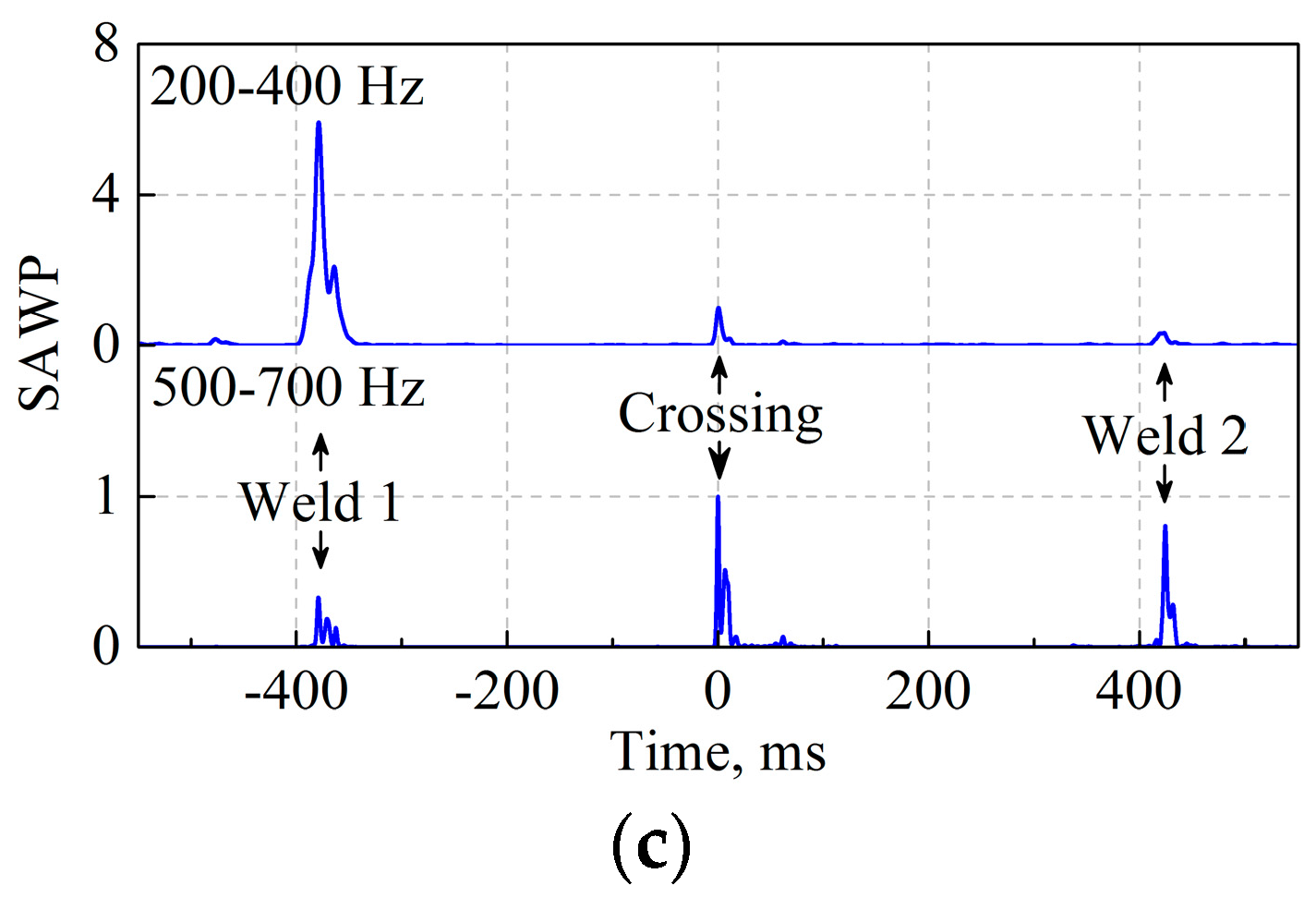
- Degradation type 2 (local irregularity in the longitudinal slope of the crossing nose). It increases the vibration energy at 460–650 Hz. Thus, the location of the irregularity can be determined by the spatial distribution of the 460–650 Hz components, while the severity can be evaluated by the value of .
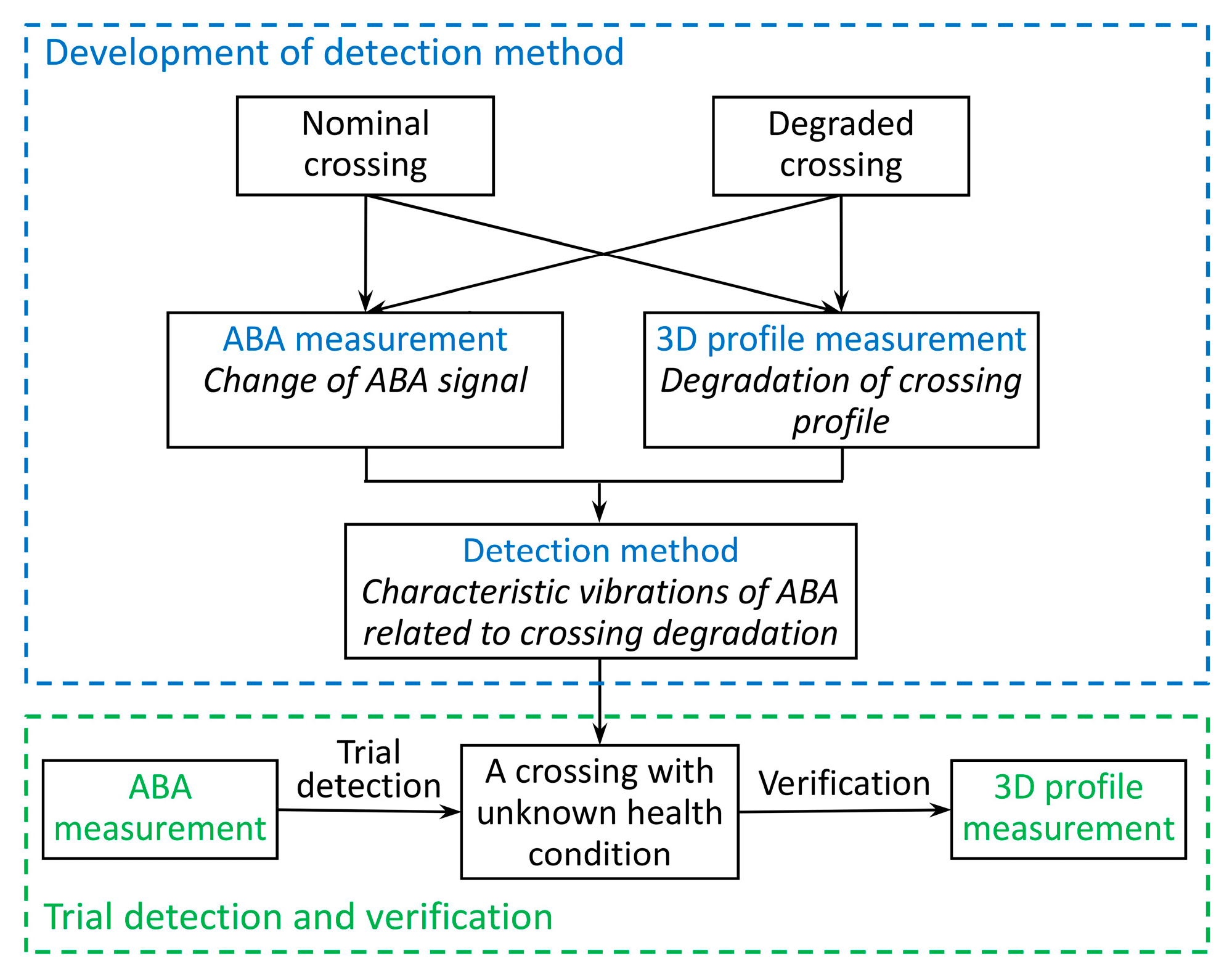
3.3. Detection Algorithm of Crossing Degradation
- If and , then the crossing suffers from uneven deformation. Its severity increases with the increase of and .
- Otherwise, the crossing does not exhibit significant uneven deformation.
- If there is more than one position with , then the crossing suffers from irregularity at the nose. Its severity increases with the increase in .
- Otherwise, the crossing does not exhibit significant local irregularity at the nose.
4. Case Study: Trial Detection and Verification
4.1. The Crossing with Unknown Degradation Status
4.2. Trial Evaluation
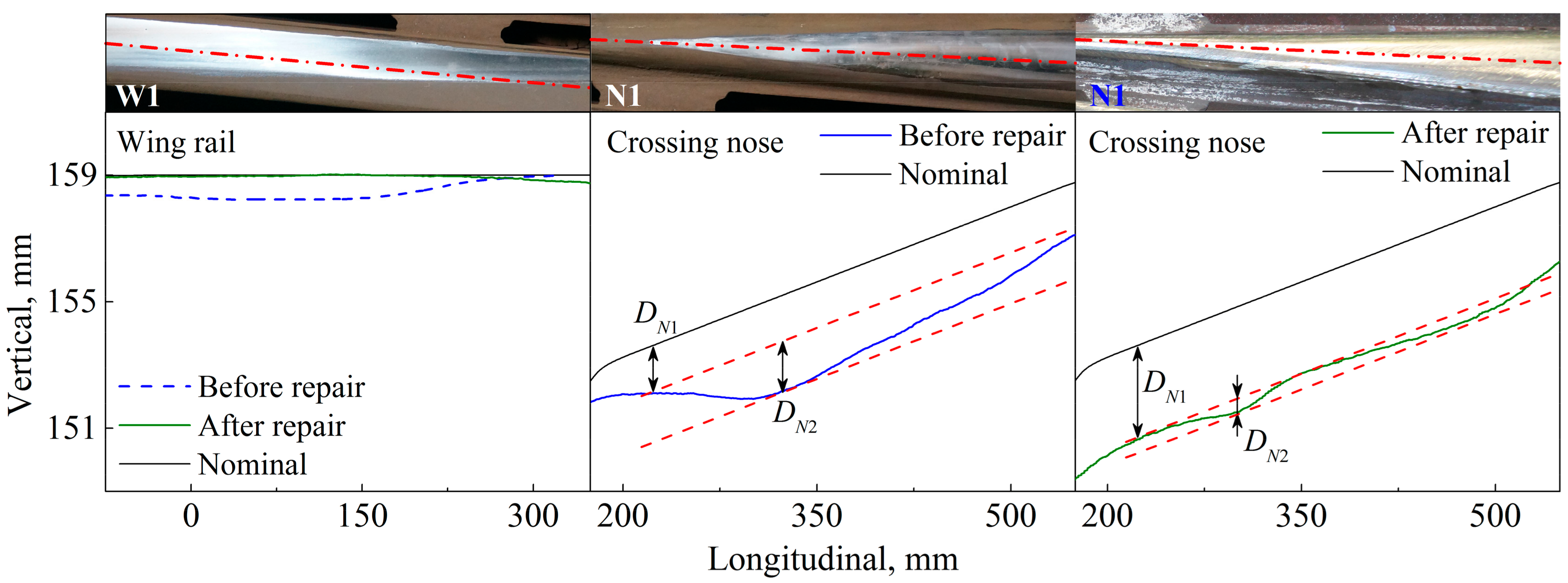
4.3. Verification
5. Discussion: Aspects Considered Helpful for Extending the ABA System to Other Examples
- The effect of non-identical wheel-rail trajectory on the characteristic frequencies of ABA. In the real-life implementation of the ABA system, it is impossible to keep the identical wheel-rail trajectory among measurements. On one hand, it is difficult to keep in-service trains with a controlled constant train speed; on the other, the wheel-rail trajectory is affected by the randomness of vehicle-track interaction (e.g., hunting oscillation). The effect of non-identical trajectory on the characteristic frequencies of ABA must be analyzed. In the literature, it is found that the characteristic frequencies of ABA are related to the natural response of the vehicle-track system [38], so that the characteristic frequencies of ABA, and thus the capability of the proposed detection algorithm, are not greatly affected by non-identical wheel-rail trajectory.
- The effect of the crossing type on the characteristic frequencies of ABA. In this study, the proposed detection algorithm is demonstrated and verified on the crossing type of 54E1-1:9. Because the natural response of crossings may differ from one type to another, the characteristic frequencies of ABA on other crossing types should be extracted. To overcome the limitations on field track testing, computer-aided approaches (e.g., finite element simulation [24] and machine learning [42]) can be used for virtual testing. The ABA system can be more conveniently extended to various crossing types using more flexible and relatively faster numerical modeling rather than time-consuming and expensive in situ measurements.
6. Conclusions and Further Work
- (1)
- The ABA system can identify two types of crossing degradation. The first type is uneven deformation between the wing rail and the crossing nose, and the second type is local irregularity in the longitudinal slope of the crossing nose.
- (2)
- Deformation of the crossing nose that is more severe than that of the wing rail exacerbates wheel-rail impact during the facing motion of vehicles, increasing the energy concentrated at the characteristic frequencies of 230–350 and 460–650 Hz. The severity of the uneven deformation can be evaluated by the energy concentration at these frequencies.
- (3)
- The presence of a local irregularity at the crossing nose increases the vibration energy at the characteristic frequencies of 460–650 Hz. The location of the irregularity can be determined by the spatial distribution of these frequencies, while the severity can be evaluated by the energy concentration at these frequencies.
- (4)
- The ABA system can detect crossing degradation at measuring speeds as low as 26–28 km/h. Therefore, the capability of the method in large-scale networks is not restricted to the low operational speed often specified at crossings (40–80 km/h on the Dutch railway).
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| ABA | axle box acceleration |
| CWT | continuous wavelet transform |
| GPS | global positioning system |
| GWPS | global wavelet power spectra |
| SAWP | scale-averaged wavelet power |
| WPS | wavelet power spectrum |
| reconstruction factor | |
| , | height difference of crossing nose between nominal and degraded states |
| height difference of wing rail between nominal and degraded states | |
| , | frequency |
| number of points in time series | |
| continuous variable for translation | |
| wavelet scale | |
| wavelet coefficients | |
| wavelet power spectrum | |
| scale-averaged wavelet power of frequency band to | |
| analyzed ABA signal | |
| scale-averaged wavelet power at nominal state | |
| scale step of scale-averaged wavelet power | |
| time step | |
| mother wavelet | |
| complex conjugate |
References
- Pålsson, B.A.; Nielsen, J.C. Wheel-rail interaction and damage in switches and crossings. Veh. Syst. Dyn. 2012, 50, 43–58. [Google Scholar] [CrossRef]
- ProRail. Jaarverslag 2015. Utrecht, The Netherlands, 2015. Available online: http://www.webcitation.org/6tlGQR8K3 (accessed on 26 September 2017).
- Giannakos, K. Modeling the influence of short wavelength defects in a railway track on the dynamic behavior of the Non-Suspended Masses. Mech. Syst. Signal Process. 2016, 68, 68–83. [Google Scholar] [CrossRef]
- Edwards, R.S.; Dixon, S.; Jian, X. Characterisation of defects in the railhead using ultrasonic surface waves. NDT E Int. 2006, 39, 468–475. [Google Scholar] [CrossRef]
- Her, S.C.; Lin, S.T. Non-destructive evaluation of depth of surface cracks using ultrasonic frequency analysis. Sensors 2014, 14, 17146–17158. [Google Scholar] [CrossRef] [PubMed]
- Papaelias, M.; Lugg, M. Detection and evaluation of rail surface defects using alternating current field measurement techniques. Proc. Inst. Mech. Eng. Part F 2012, 227, 310–321. [Google Scholar] [CrossRef]
- Oukhellou, L.; Come, E.; Bouillaut, L.; Aknin, P. Combined use of sensor data and structural knowledge processed by Bayesian network: Application to a railway diagnosis aid scheme. Transp. Res. Part C 2008, 16, 755–767. [Google Scholar] [CrossRef]
- Miya, K. Recent advancement of electromagnetic nondestructive inspection technology in Japan. IEEE Trans. Magn. 2002, 38, 321–326. [Google Scholar] [CrossRef]
- Li, Q.; Ren, S. A real-time visual inspection system for discrete surface defects of rail heads. IEEE Trans. Instrum. Meas. 2012, 61, 2189–2199. [Google Scholar] [CrossRef]
- Xu, T.; Wang, G.; Wang, H.; Yuan, T.; Zhong, Z. Gap Measurement of Point Machine Using Adaptive Wavelet Threshold and Mathematical Morphology. Sensors 2016, 16, 2006. [Google Scholar] [CrossRef] [PubMed]
- Wei, J.; Liu, C.; Ren, T.; Liu, H.; Zhou, W. Online condition monitoring of a rail fastening system on high-speed railways based on wavelet packet analysis. Sensors 2017, 17, 318. [Google Scholar] [CrossRef] [PubMed]
- Macucci, M.; Di Pascoli, S.; Marconcini, P.; Tellini, B. Wireless sensor network for derailment detection in freight trains powered from vibrations. In Proceedings of the 2015 IEEE International Workshop on Measurements & Networking (M&N), Coimbra, Portugal, 12–13 October 2015; pp. 1–6. [Google Scholar]
- Westeon, P.; Ling, C.; Roberts, C.; Goodman, C.; Li, P.; Goodall, R. Monitoring vertical track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. Part F 2007, 221, 75–88. [Google Scholar] [CrossRef]
- Rose, J.; Avioli, M.; Song, W. Application and potential of guided wave rail inspection. Insight 2002, 44, 353–358. [Google Scholar]
- Saponara, S.; Neri, B. Radar sensor signal acquisition and multidimensional FFT processing for surveillance applications in transport systems. IEEE Trans. Instrum. Meas. 2017, 66, 604–615. [Google Scholar] [CrossRef]
- Saponara, S.; Neri, B. Design of compact and low-power X-band Radar for mobility surveillance applications. Comput. Electr. Eng. 2016, 56, 46–63. [Google Scholar] [CrossRef]
- Wilson, J.; Tian, G.; Mukriz, I.; Almond, D. PEC thermography for imaging multiple cracks from rolling contact fatigue. NDT E Int. 2011, 44, 505–512. [Google Scholar] [CrossRef]
- Clark, M.; McCann, D.; Forde, M. Infrared thermographic investigation of railway track ballast. NDT E Int. 2002, 35, 83–94. [Google Scholar] [CrossRef]
- Bruzelius, K.; Mba, D. An initial investigation on the potential applicability of Acoustic Emission to rail track fault detection. NDT E Int. 2004, 37, 507–516. [Google Scholar] [CrossRef] [Green Version]
- Thakkar, N.; Steel, J.; Reuben, R. Rail-wheel interaction monitoring using Acoustic Emission: A laboratory study of normal rolling signals with natural rail defects. Mech. Syst. Signal Process. 2010, 24, 256–266. [Google Scholar] [CrossRef]
- Clark, M.; Gordon, M.; Forde, M.C. Issues over high-speed non-invasive monitoring of railway trackbed. NDT E Int. 2004, 37, 131–139. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Xie, W.; Roberts, R.; Leng, Z. Data analysis techniques for GPR used for assessing railroad ballast in high radio-frequency environment. J. Transp. Eng. 2010, 136, 392–399. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Núñez, A.; Dollevoet, R. Automatic detection of squats in railway infrastructure. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1980–1990. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Dollevoet, R. Axle box acceleration: Measurement and simulation for detection of short track defects. Wear 2011, 271, 349–356. [Google Scholar] [CrossRef]
- Molodova, M.; Oregui, M.; Núñez, A.; Li, Z.; Dollevoet, R. Health condition monitoring of insulated joints based on axle box acceleration measurements. Eng. Struct. 2016, 123, 225–235. [Google Scholar] [CrossRef]
- Massel, A. Power spectrum analysis—Modern tool in the study of rail surface corrugations. NDT E Int. 1999, 32, 429–436. [Google Scholar] [CrossRef]
- Bocciolone, M.; Caprioli, A.; Cigada, A.; Collina, A. A measurement system for quick rail inspection and effective track maintenance strategy. Mech. Syst. Signal Process. 2007, 21, 1242–1254. [Google Scholar] [CrossRef]
- Tanaka, H.; Shimizu, A. Practical Application of Portable Trolley for the Continuous Measurement of Rail Surface Roughness for Rail Corrugation Maintenance. Q. Rep. RTRI 2016, 57, 118–124. [Google Scholar] [CrossRef]
- Alfi, S.; Braghin, F.; Bruni, S. Numerical and experimental evaluation of extreme wheel–rail loads for improved wheelset design. Veh. Syst. Dyn. 2008, 46, 431–444. [Google Scholar] [CrossRef]
- Kaewunruen, S. Monitoring structural deterioration of railway turnout systems via dynamic wheel/rail interaction. Case Stud. Nondestruct. Test. Eval. 2014, 1, 19–24. [Google Scholar] [CrossRef]
- Ward, C.P.; Weston, P.; Stewart, E.; Li, H.; Goodall, R.M.; Roberts, C.; Mei, T.; Charles, G.; Dixon, R. Condition monitoring opportunities using vehicle-based sensors. Proc. Inst. Mech. Eng. Part F 2011, 225, 202–218. [Google Scholar] [CrossRef]
- Salvador, P.; Naranjo, V.; Insa, R.; Teixeira, P. Axlebox accelerations: Their acquisition and time–frequency characterisation for railway track monitoring purposes. Measurement 2016, 82, 301–312. [Google Scholar] [CrossRef]
- Ovanesova, A.; Suarez, L. Applications of wavelet transforms to damage detection in frame structures. Eng. Struct. 2004, 26, 39–49. [Google Scholar] [CrossRef]
- Vetterli, M.; Kovacevic, J. Wavelets and Subband Coding; Prentice-Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Grinsted, A.; Moore, J.C.; Jevrejeva, S. Application of the cross wavelet transform and wavelet coherence to geophysical time series. Nonlinear Process. Geophys. 2004, 11, 561–566. [Google Scholar] [CrossRef]
- Torrence, C.; Compo, G.P. A practical guide to wavelet analysis. Bull. Am. Meteorol. Soc. 1998, 79, 61–78. [Google Scholar] [CrossRef]
- Wei, Z.; Shen, C.; Li, Z.; Dollevoet, R. Wheel–Rail Impact at Crossings: Relating Dynamic Frictional Contact to Degradation. J. Comput. Nonlinear Dyn. 2017, 12, 041016. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Nunez, A.; Dollevoet, R. Parameter study of the axle box acceleration at squats. Proc. Inst. Mech. Eng. Part F 2014, 229, 841–851. [Google Scholar] [CrossRef]
- De Man, A.P. DYNATRACK: A Survey of Dynamic Railway Track Properties and Their Quality; Delft University of Technology: Delft, The Netherlands, 2002. [Google Scholar]
- Nielsen, J.C.; Igeland, A. Vertical dynamic interaction between train and track influence of wheel and track imperfections. J. Sound Vib. 1995, 187, 825–839. [Google Scholar] [CrossRef]
- Wu, T.; Thompson, D. On the impact noise generation due to a wheel passing over rail joints. J. Sound Vib. 2003, 267, 485–496. [Google Scholar] [CrossRef]
- Krummenacher, G.; Ong, C.S.; Koller, S.; Kobayashi, S.; Buhmann, J.M. Wheel Defect Detection with Machine Learning. IEEE Trans. Intell. Transp. Syst. 2017. [Google Scholar] [CrossRef]
- Carnevale, M.; Collina, A. Processing of collector acceleration data for condition-based monitoring of overhead lines. Proc. Inst. Mech. Eng. Part F 2016, 230, 472–485. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, H.; Dollevoet, R.; Song, Y.; Núñez, A.; Zhang, J. Ensemble EMD-Based Automatic Extraction of the Catenary Structure Wavelength From the Pantograph–Catenary Contact Force. IEEE Trans. Instrum. Meas. 2016, 65, 2272–2283. [Google Scholar] [CrossRef]
- Marichal, G.; Artes, M.; Garcia-Prada, J. An intelligent system for faulty-bearing detection based on vibration spectra. J. Vib. Control 2011, 17, 931–942. [Google Scholar] [CrossRef]














© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Z.; Núñez, A.; Li, Z.; Dollevoet, R. Evaluating Degradation at Railway Crossings Using Axle Box Acceleration Measurements. Sensors 2017, 17, 2236. https://doi.org/10.3390/s17102236
Wei Z, Núñez A, Li Z, Dollevoet R. Evaluating Degradation at Railway Crossings Using Axle Box Acceleration Measurements. Sensors. 2017; 17(10):2236. https://doi.org/10.3390/s17102236
Chicago/Turabian StyleWei, Zilong, Alfredo Núñez, Zili Li, and Rolf Dollevoet. 2017. "Evaluating Degradation at Railway Crossings Using Axle Box Acceleration Measurements" Sensors 17, no. 10: 2236. https://doi.org/10.3390/s17102236
APA StyleWei, Z., Núñez, A., Li, Z., & Dollevoet, R. (2017). Evaluating Degradation at Railway Crossings Using Axle Box Acceleration Measurements. Sensors, 17(10), 2236. https://doi.org/10.3390/s17102236