
An Approach to Automated Fusion System Design and Adaptation



Abstract
:1. Introduction
2. Related Work
- technical sensor units (e.g., temperature, pressure, humidity sensors),
- multimodal sensor units (e.g., audio-visual camera systems),
- database systems (storing, e.g., past measurements, production plans),
- expert knowledge.
- availability of new sources through sub-system inclusion,
- utilisation of actuators as sensors (such as shared use of data for motion control and condition monitoring),
- exploitation of new data source concepts (e.g., utilisation of consumer-market smartphones for vibration measurements [10]).
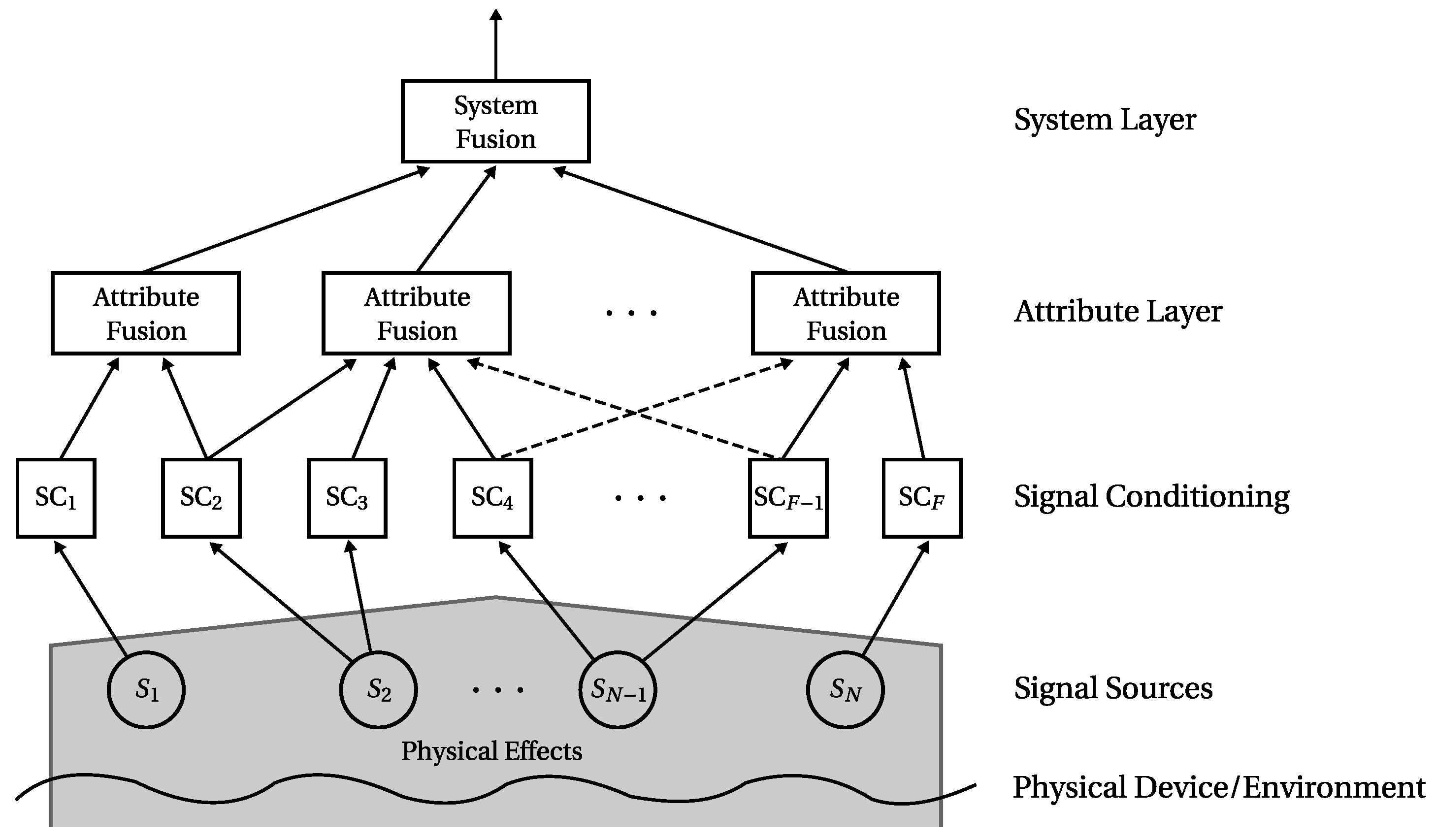
2.1. Multilayer Attribute-Based Conflict-Reducing Observation (MACRO)
2.2. System Design and Configuration
3. Automated Fusion System Design
- It is equipped with one or more elementary sensors, memory, and one or more processor units, as well as communication interfaces.
- An intelligent sensor is self-adaptable, i.e., its parameters (measurement range, accuracy, etc.) change with respect to changes in the environment.
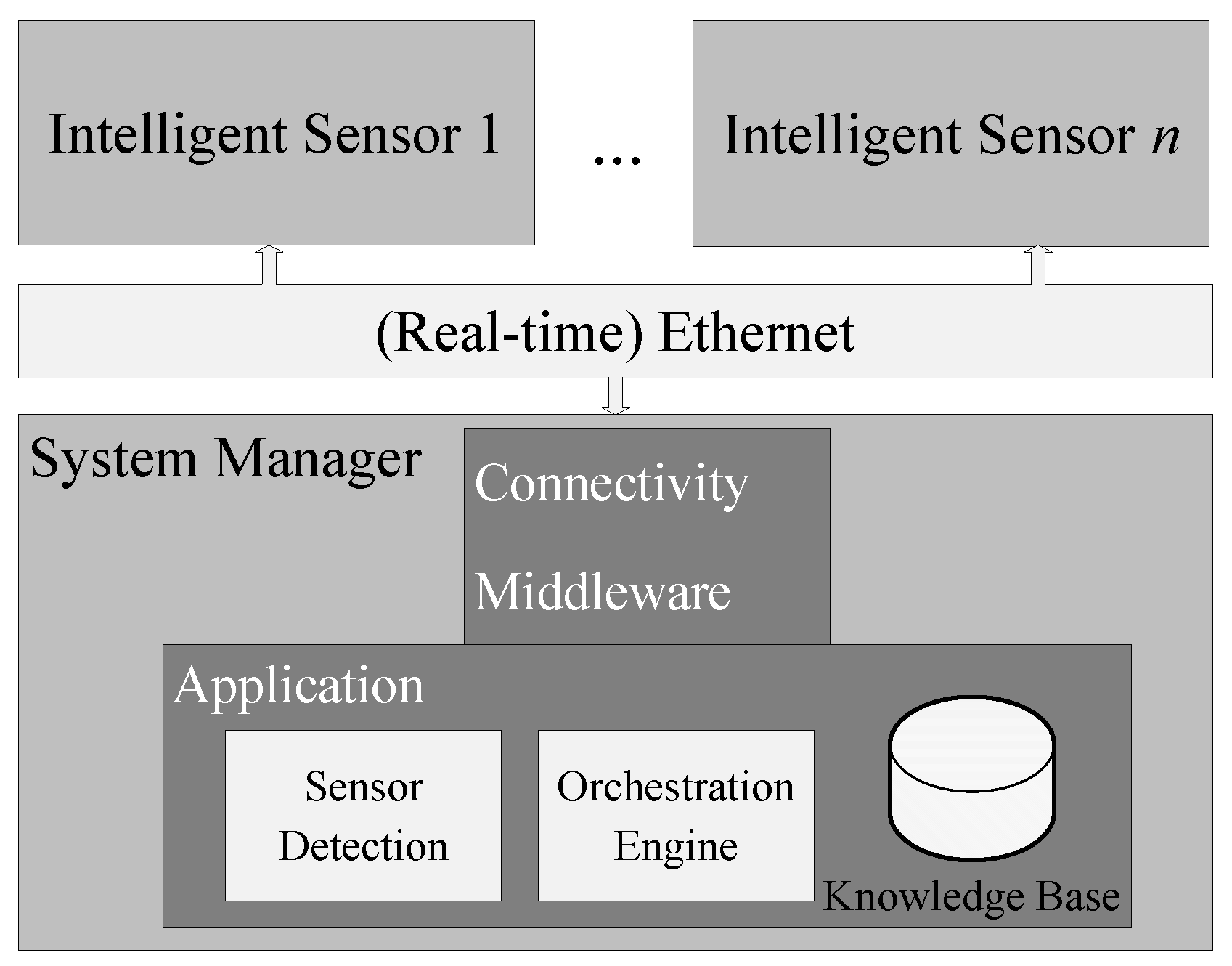
- The functionalities of an intelligent sensor are distributed over the following layers:
- –
- The application layer implements signal processing capabilities containing, among others, feature extraction on the basis of raw sensor data as well as SEFU/IFU implementations to generate high-level information.
- –
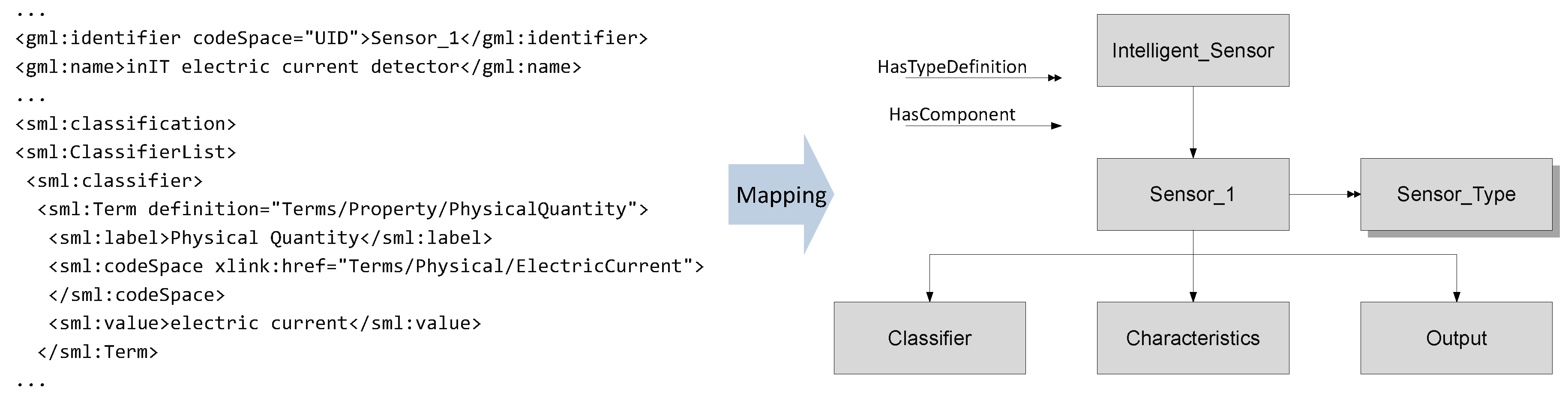
- The middleware layer abstracts the connectivity layer from the application layer, and includes a self-description that relies on a defined data structure and vocabulary from a shared knowledge base.
- –
- The connectivity layer implements the communication interfaces and fulfils the requirements for intelligent networking (auto-configuration, adaptability, etc.).
- The application’s requirements have to be fulfilled by a proper selection of sensors with respect to the measured quantity, the measurement range, and resolution. A general intelligent sensor according to Definition 5 is suggested that adapts to the actual condition and automatically operates in the optimal configuration. Furthermore, the intelligent sensor includes a self-description for automated fusion system design.
- The system designer should only be assisted in the design process and must remain as the final decision maker. Solutions for the design should, at most, be suggested such that the system designer can choose the most appropriate one.
- Each design of a SEFU/IFU system depends on the specific application. Nevertheless, partial solutions are reusable and should therefore be considered before identifying a completely new SEFU/IFU system design. Consequently, repositories for storage of problem formulations and solutions have to be available that hold information in a defined manner to identify similarities.
- Attributes of the MACRO system or their input signals include descriptive information to automatically generate, update, and destroy the attributes. Hence, available autoconfiguration mechanisms have to be extended by a fusion system design methodology in order to be able to process self-descriptive data that originates from intelligent sensors.
3.1. System Architecture
3.2. Rule-Based Systems
| Algorithm 1: Forward Chaining Algorithm |
 |
3.3. Orchestration
- Initialisation of attributes.
- Inference of features.
- Assignment of features to attributes.
3.3.1. Attribute Initialisation
- A Unique Identifier (UID),
- The attribute type (physical, module, quality, functional),
- An associated object,
- A set of physical phenomena ,
- A set of allowed features .
| Algorithm 2: Initialisation of Module and Physical Attributes |
 |
- 1.
- A module attribute that represents the module itself (inIT:attributes:press). This attribute consists of empty sets and .
- 2.
- A physical attribute for temperature. This attribute includes the module as an associated object (inIT:modules:press), the set of physical phenomena , and an empty set of suitable features .
3.3.2. Feature Assignment
3.3.3. Attribute Assignment
4. Implementation
4.1. Middleware
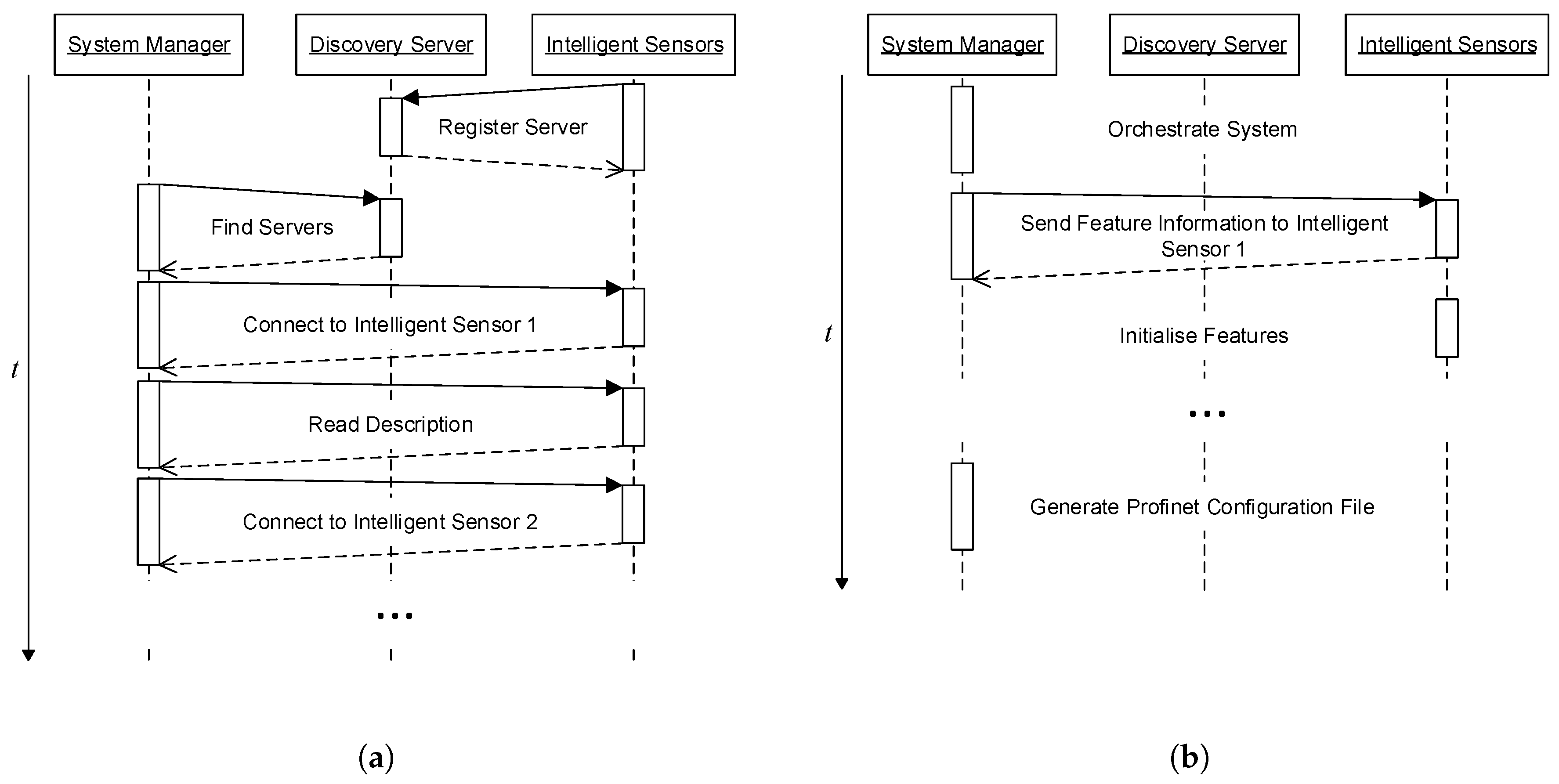
4.2. Fusion System Configuration and Adaptation
- The system manager detects available intelligent sensors.
- Semantic information is transferred to the KB.
- Fusion system configuration is automatically carried out.
- The system structure is observed to automatically adapt the fusion system.
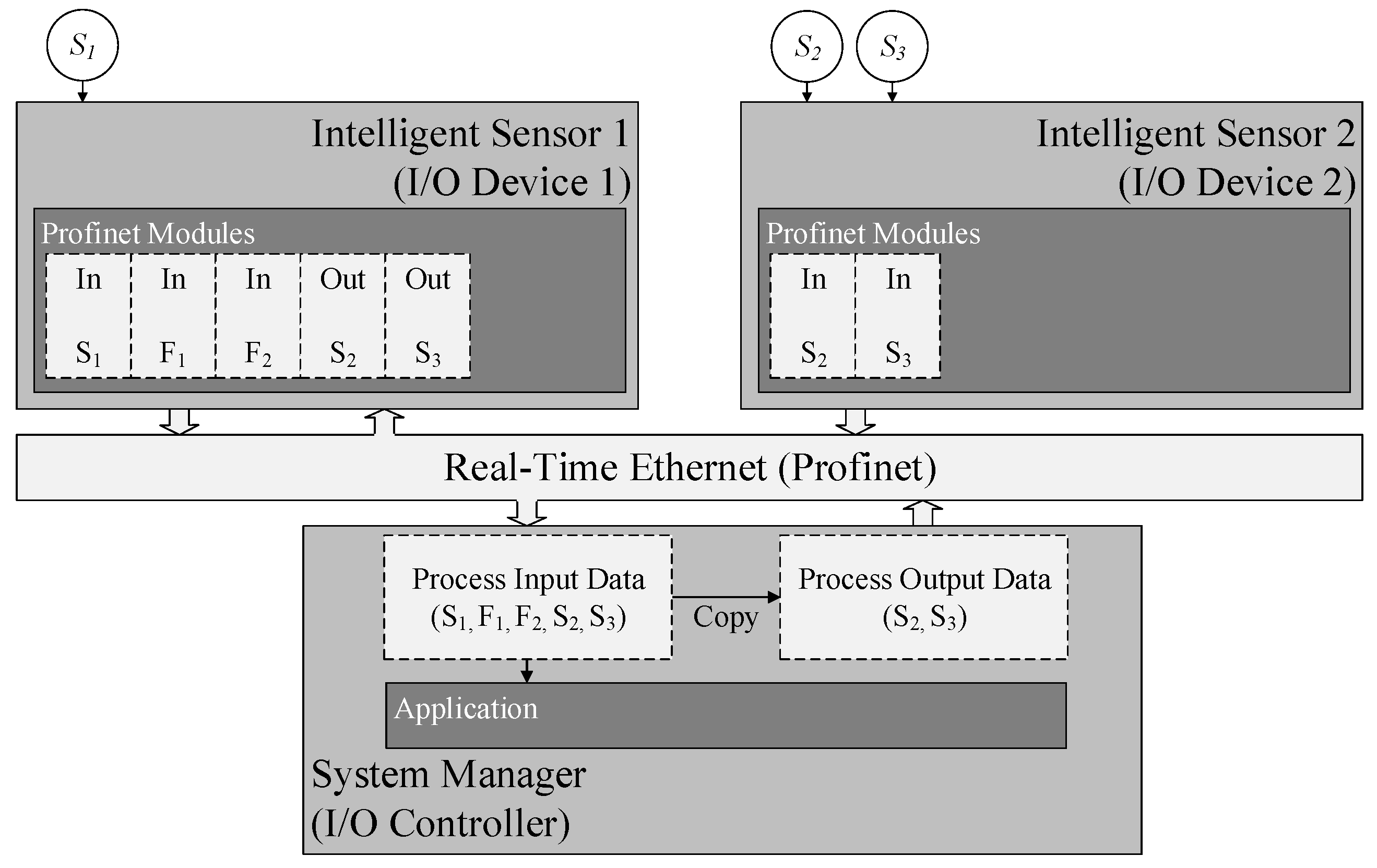
4.3. Process Data Communication
5. Evaluation
5.1. Orchestration
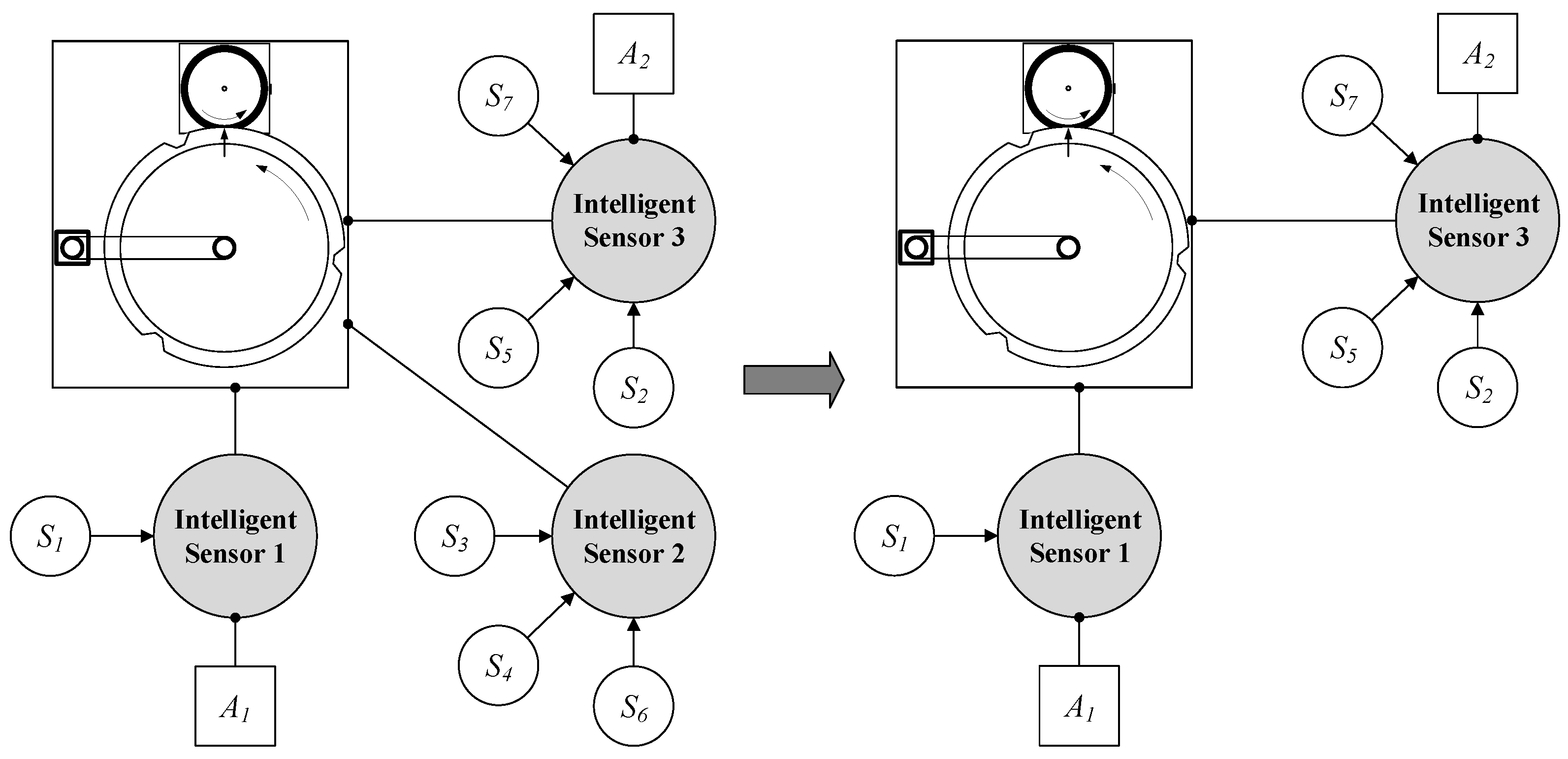
5.2. Fusion System Update
5.3. Discussion
6. Conclusions and Outlook
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AutomationML | Automation Markup Language |
| DL | Description Logic |
| GSD | Generic Station Description |
| KB | Knowledge Base |
| LDS | Local Discovery Server |
| MACRO | Multilayer Attribute-based Conflict-reducing Observation System |
| MAS | Multi-Agent System |
| OPC UA | Open Platform Communication Unified Architecture |
| OWL | Web Ontology Language |
| RTE | Real-Time Ethernet |
| SAWSDL | Semantic Annotation for Webservices Description Language |
| SEFU/IFU | Sensor and Information Fusion |
| SensorML | Sensor Model Language |
| SWS | Semantic Web Services |
| UID | Unique Identifier |
| XLink | XML Linking Language |
| XML | eXtensible Markup Language |
Appendix A. Implementation Specifications
Appendix A.1. Raspberry Pi
Appendix A.2. OPC UA
Appendix A.3. SensorML
Appendix A.4. Profinet Controller/Device Stack
References
- Mönks, U.; Trsek, H.; Dürkop, L.; Geneiß, V.; Lohweg, V. Towards distributed intelligent sensor and information fusion. Mechatronics 2015, 34, 63–71. [Google Scholar] [CrossRef]
- Hall, D.L.; Llinas, J. Multisensor Data Fusion. In Handbook of Multisensor Data Fusion; Hall, D.L., Llinas, J., Eds.; CRC Press: Boca Raton, FL, USA, 2001; pp. 1–10. [Google Scholar]
- Iswandy, K.; König, A. Methodology, Algorithms, and Emerging Tool for Automated Design of Intelligent Integrated Multi-Sensor Systems. Algorithms 2009, 2, 1368–1409. [Google Scholar] [CrossRef] [Green Version]
- Iswandy, K.; König, A. Automated Design of Dependable Intelligent Sensory Systems with Self-x Properties. In Knowledge-Based and Intelligent Information And Engineering Systems; König, A., Dengel, A., Hinkelmann, K., Kise, K., Howlett, R.J., Jain, L.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 6884, pp. 155–166. [Google Scholar]
- Thongpull, K.; Groben, D.; König, A. A design automation approach for task-specific intelligent multi-sensory systems—Lab-on-spoon in food applications. Tech. Mess. 2015, 82, 196–208. [Google Scholar] [CrossRef]
- Mönks, U. Information Fusion Under Consideration of Conflicting Input Signals; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Fritze, A.; Mönks, U.; Lohweg, V. A Support System for Sensor and Information Fusion System Design. Procedia Technol. 2016, 2016, 580–587. [Google Scholar] [CrossRef]
- Ruser, H.; Puente Léon, F. Methoden der Informationsfusion—Überblick und Taxonomie. In Informationsfusion in der Mess- und Sensortechnik; Beyerer, J., Puente Léon, F., Sommer, K.D., Eds.; Universitätsverlag Karlsruhe: Karlsruhe, Germany, 2006; pp. 1–20. [Google Scholar]
- Ayyub, B.M.; Klir, G.J. Uncertainty Modeling and Analysis in Engineering and the Sciences; Chapman & Hall/CRC: Boca Raton, FL, USA, 2006. [Google Scholar]
- Rzeszucinski, P.; Orman, M.; Pinto, C.T.; Tkaczyk, A.; Sulowicz, M. A signal processing approach to bearing fault detection with the use of a mobile phone. In Proceedings of the 2015 IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2015; pp. 310–315.
- Mönks, U.; Dörksen, H.; Lohweg, V.; Hübner, M. Information Fusion of Conflicting Input Data. Sensors 2016, 16, 1798. [Google Scholar] [CrossRef] [PubMed]
- Mönks, U.; Lohweg, V. Machine Conditioning by Importance Controlled Information Fusion. In Proceedings of the 18th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2013), Cagliari, Italy, 10–13 September 2013; pp. 1–8.
- Ehlenbröker, J.F.; Mönks, U.; Wesemann, D.; Lohweg, V. Condition Monitoring for Hazardous Material Storage. In Proceedings of the 19th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2014), Barcelona, Spain, 16–19 September 2014.
- Zadeh, L.A. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Lohweg, V.; Diederichs, C.; Müller, D. Algorithms for Hardware-Based Pattern Recognition. EURASIP J. Appl. Signal Process. 2004, 2004, 1912–1920. [Google Scholar] [CrossRef]
- Mönks, U.; Lohweg, V. Fast Evidence-based Information Fusion. In Proceedings of the IEEE 4th International Workshop on Cognitive Information Processing (CIP 2014), Copenhagen, Denmark, 26–28 May 2014; pp. 1–6.
- Mönks, U.; Voth, K.; Lohweg, V. An Extended Perspective on Evidential Aggregation Rules in Machine Condition Monitoring. In Proceedings of the 3rd International Workshop on Cognitive Information Processing (CIP 2012), Baiona, Spain, 28–30 May 2012; pp. 1–6.
- Mönks, U.; Priesterjahn, S.; Lohweg, V. Automated Fusion Attribute Generation for Condition Monitoring. In Proceedings 23. Workshop Computational Intelligence; Hoffmann, F., Hüllermeier, E., Eds.; KIT Scientific Publishing: Karlsruhe, Germany, 2013; Volume 46, pp. 339–353. [Google Scholar]
- Chakraborty, D.; Pal, N.R. Selecting Useful Groups of Features in a Connectionist Framework. IEEE Trans. Neural Netw. 2008, 19, 381–396. [Google Scholar] [CrossRef] [PubMed]
- Chakraborty, R.; Lin, C.T.; Pal, N.R. Sensor (Group Feature) Selection with Controlled Redundancy in a Connectionist Framework. Int. J. Neural Syst. 2014, 24, 1450021. [Google Scholar] [CrossRef] [PubMed]
- Thongpull, K.; König, A. Application-Specific Partially Automated Design of Multi-Sensor Intelligent Lab-on-Spoon System. In Symposium des Arbeitskreises der Hochschullehrer für Messtechnik AHMT 2014; AMA Service GmbH: Wunstorf, Germany, 2014; pp. 111–120. [Google Scholar]
- Huebscher, M.C.; McCann, J.A. Adaptive Middleware for Context-aware Applications in Smart-homes. In Proceedings of the 2nd Workshop on Middleware for Pervasive and Ad-hoc Computing (MPAC ’04); ACM: New York, NY, USA, 2004; pp. 111–116. [Google Scholar]
- Alex, H.; Kumar, M.; Shirazi, B. MidFusion: An adaptive middleware for information fusion in sensor network applications. Inf. Fusion 2008, 9, 332–343. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Jakob, M.; Kaveh, N.; Ghanea-Hercock, R. Nexus—Middleware for Decentralized Service-Oriented Information Fusion. Defense Technical Information Center Online. Available online: www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=ADA474374 (accessed on 16 March 2017).
- Mahnke, W.; Leitner, S.H.; Damm, M. OPC Unified Architecture; Springer: Berlin, Germany, 2009. [Google Scholar]
- Lastra, J.; Delamer, I.M. Semantic web services in factory automation: fundamental insights and research roadmap. IEEE Trans. Ind. Inform. 2006, 2, 1–11. [Google Scholar] [CrossRef]
- Fensel, D.; Lausen, H.; Polleres, A.; Bruijn, J.; Stollberg, M.; Roman, D.; Domingue, J. Enabling Semantic Web Services: The Web Service Modeling Ontology, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Compton, M.; Henson, C.; Lefort, L.; Neuhaus, H.; Sheth, A. A Survey of the Semantic Specification of Sensors. In Proceedings of the 2nd International Workshop on Semantic Sensor Networks (SSN09) at ISWC 2009, Washington, DC, USA, 25–29 October 2009; Volume 522, pp. 17–32.
- Compton, M.; Neuhaus, H.; Ayyagari, A.; De Roure, D.; Taylor, K.; Tran, K.N. Reasoning about Sensors and Compositions. In Proceedings of the 2nd International Workshop on Semantic Sensor Networks (SSN09) at ISWC 2009, Washington, DC, USA, 25–29 October 2009; Volume 522, pp. 33–48.
- Drath, R.; Lüder, A.; Peschke, J.; Hundt, L. AutomationML—The glue for seamless automation engineering. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2008), Hamburg, Germany, 15–18 September 2008; pp. 616–623.
- Botts, M.; Percivall, G.; Reed, C.; Davidson, J. OGC® SensorWeb Enablement: Overview and High Level Architecture. In GeoSensor Networks; Nittel, S., Labrinidis, A., Stefanidis, A., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2008; Volume 4540, pp. 175–190. [Google Scholar]
- Bröring, A.; Maué, P.; Janowicz, K.; Nüst, D.; Malewski, C. Semantically-Enabled Sensor Plug & Play for the Sensor Web. Sensors 2011, 11, 7568–7605. [Google Scholar] [PubMed]
- Frank, C.; Römer, K. Algorithms for Generic Role Assignment in Wireless Sensor Networks. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems (SenSys ’05), San Diego, CA, USA, 2–4 November 2005.
- Rybicki, T.; Domaszewicz, J. Sensor-Actuator Networks with TBox Snippets. In Advances in Grid and Pervasive Computing; Abdennadher, N., Petcu, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5529, pp. 317–327. [Google Scholar]
- Loskyll, M.; Schlick, J.; Hodek, S.; Ollinger, L.; Gerber, T.; Pirvu, B. Semantic service discovery and orchestration for manufacturing processes. In Proceedings of the 2011 IEEE 16th Conference on Emerging Technologies Factory Automation (ETFA), Toulouse, France, 5–9 September 2011; pp. 1–8.
- Dressler, F. A study of self-organization mechanisms in ad hoc and sensor networks. Comput. Commun. 2008, 31, 3018–3029. [Google Scholar] [CrossRef]
- Serugendo, G.D.M.; Gleizes, M.P.; Karageorgos, A. Self-organization in multi-agent systems. Knowl. Eng. Rev. 2005, 20, 165–189. [Google Scholar] [CrossRef]
- Prehofer, C.; Bettstetter, C. Self-Organization in Communication Networks: Principles and Design Paradigms. IEEE Commun. Mag. 2005, 43, 78–85. [Google Scholar] [CrossRef]
- Elmenreich, W.; de Meer, H. Self-Organizing Networked Systems for Technical Applications: A Discussion on Open Issues. In Self-Organizing Systems; Hummel, K.A., Sterbenz, J.P.G., Eds.; Springer: Berlin, Germany, 2008; Volume 5343, pp. 1–9. [Google Scholar]
- Wooldridge, M. Intelligent Agents: The Key Concepts. In Multi-Agent Systems and Applications II; Mařík, V., Ed.; Springer: Berlin, Germany, 2002; Volume 2322, pp. 3–43. [Google Scholar]
- Wooldridge, M.; Jennings, N.R. Intelligent agents: Theory and practice. Knowl. Eng. Rev. 1995, 10, 115–152. [Google Scholar] [CrossRef]
- Wooldridge, M. An Introduction to MultiAgent Systems, 2nd ed.; Wiley and Chichester: Hoboken, NJ, USA, 2009. [Google Scholar]
- Schermer, B.W. Software Agents, Surveillance, and the Right to Privacy: A Legislative Framework for Agent-Enabled Surveillance/Bart Willem Schermer; SIKS Dissertation Series, 1873-0760; Leiden University Press: Leiden, The Nederlands, 2007; Volume 2007:05. [Google Scholar]
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-organization, embodiment, and biologically inspired robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm Robotics: A Review from the Swarm Engineering Perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Ye, D.; Zhang, M.; Vasilakos, A.V. A Survey of Self-Organization Mechanisms in Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1–21. [Google Scholar] [CrossRef]
- Unland, R. Industrial Agents. In Industrial Agents; Leitão, P., Karnouskos, S., Eds.; Elsevier: Amsterdam, The Netherlands, 2015; pp. 23–44. [Google Scholar]
- Bajo, J.; de Paz, J.F.; Villarrubia, G.; Corchado, J.M. Self-Organizing Architecture for Information Fusion in Distributed Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–13. [Google Scholar] [CrossRef]
- Frei, R.; Serugendo, G.D.M. Self-Organizing Assembly Systems. IEEE Trans. Syst. Man Cybern. Part C 2011, 41, 885–897. [Google Scholar] [CrossRef]
- Leitão, P.; Karnouskos, S.; Ribeiro, L.; Lee, J.; Strasser, T.; Colombo, A.W. Smart Agents in Industrial Cyber-Physical Systems. Proc. IEEE 2016, 104, 1086–1101. [Google Scholar] [CrossRef]
- Fritze, A.; Mönks, U.; Lohweg, V. A Concept for Self-Configuration of Adaptive Sensor and Information Fusion Systems. In Proceedings of the 21st International Conference on Emerging Technologies & Factory Automation (ETFA 2016), Berlin, Germany, 6–9 September 2016.
- Beierle, C.; Kern-Isberner, G. Methoden Wissensbasierter Systeme: Grundlagen, Algorithmen, Anwendungen (Computational Intelligence), 4th ed.; Vieweg Teubner Verlag: Wiesbaden, Germany, 2008. [Google Scholar]
- Post, E.L. Formal Reductions of the General Combinatorial Decision Problem. Am. J. Math. 1943, 65, 197–215. [Google Scholar] [CrossRef]
- Grosan, C.; Abraham, A. Intelligent Systems: A Modern Approach; Intelligent Systems Reference Library; Springer: Berlin/Heidelberg, Germany, 2011; Volume 17. [Google Scholar]
- Ligêza, A. Logical Foundations for Rule-Based Systems, 2nd ed.; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Raspberry Pi Foundation. Available online: https://www.raspberrypi.org/ (accessed on 30 November 2016).
- Automated Fusion System Design and Adaptation Implementation. Available online: https://zenodo.org/record/345130 (accessed on 2 March 2017).
- OPC Foundation. Available online: https://opcfoundation.org/ (accessed on 30 November 2016).
- Henssen, R.; Schleipen, M. Interoperability between OPC UA and AutomationML. Procedia CIRP 2014, 25, 297–304. [Google Scholar] [CrossRef]
- Botts, M.; Robin, A. OGC SensorML: Model and XML Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2014. [Google Scholar]
- Zurawski, R. Industrial Communication Technology Handbook, 2nd ed.; Industrial Information Technology Series; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2015. [Google Scholar]
- Vanzin, M.M.; Barber, K.S. Decentralized Partner Finding in Multi-Agent Systems. In Coordination of Large-Scale Multiagent Systems; Scerri, P., Vincent, R., Mailler, R., Eds.; Springer: New York, NY, USA, 2005; pp. 75–98. [Google Scholar]
- Horling, B.; Lesser, V. A survey of multi-agent organizational paradigms. Knowl. Eng. Rev. 2004, 19, 281–316. [Google Scholar] [CrossRef]
- Parker, C.; Zhang, H. Cooperative Decision-Making in Decentralized Multiple-Robot Systems: The Best-of-N Problem. IEEE/ASME Trans. Mechatron. 2009, 14, 240–251. [Google Scholar] [CrossRef]
- Valentini, G.; Hamann, H.; Dorigo, M. Self-organized Collective Decision Making: The Weighted Voter Model. In Proceedings of the 2014 International Conference on Autonomous Agents and Multi-Agent Systems, Paris, France, 5–9 May 2014; pp. 45–52.
- Reina, A.; Valentini, G.; Fernandez-Oto, C.; Dorigo, M.; Trianni, V. A Design Pattern for Decentralised Decision Making. PLoS ONE 2015, 10, e0140950. [Google Scholar] [CrossRef] [PubMed]
- Campbell, A.; Wu, A.S. Multi-agent role allocation: Issues, approaches, and multiple perspectives. Auton. Agents Multi-Agent Syst. 2011, 22, 317–355. [Google Scholar] [CrossRef]
- Prosys OPC UA Java SDK. Available online: https://www.prosysopc.com/products/opc-ua-java-sdk (accessed on 30 November 2016).
- Unified Automation GmbH. Available online: https://www.unified-automation.com/ (accessed on 30 November 2016).
- SensorML Library. Available online: https://github.com/sensiasoft/lib-sensorml (accessed on 30 November 2016).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Occurrence | |
|---|---|---|
| quantity | physical (pressure, temperature, speed, etc.) | non-physical (expert knowledge, manufacturing inventory, production rate, etc.) |
| value domain | continuous | discrete |
| codomain | binary, multi-valued | |
| time domain | continuous | discrete |
| sampling | — | equidistant, non-equidistant (including event-triggered) |
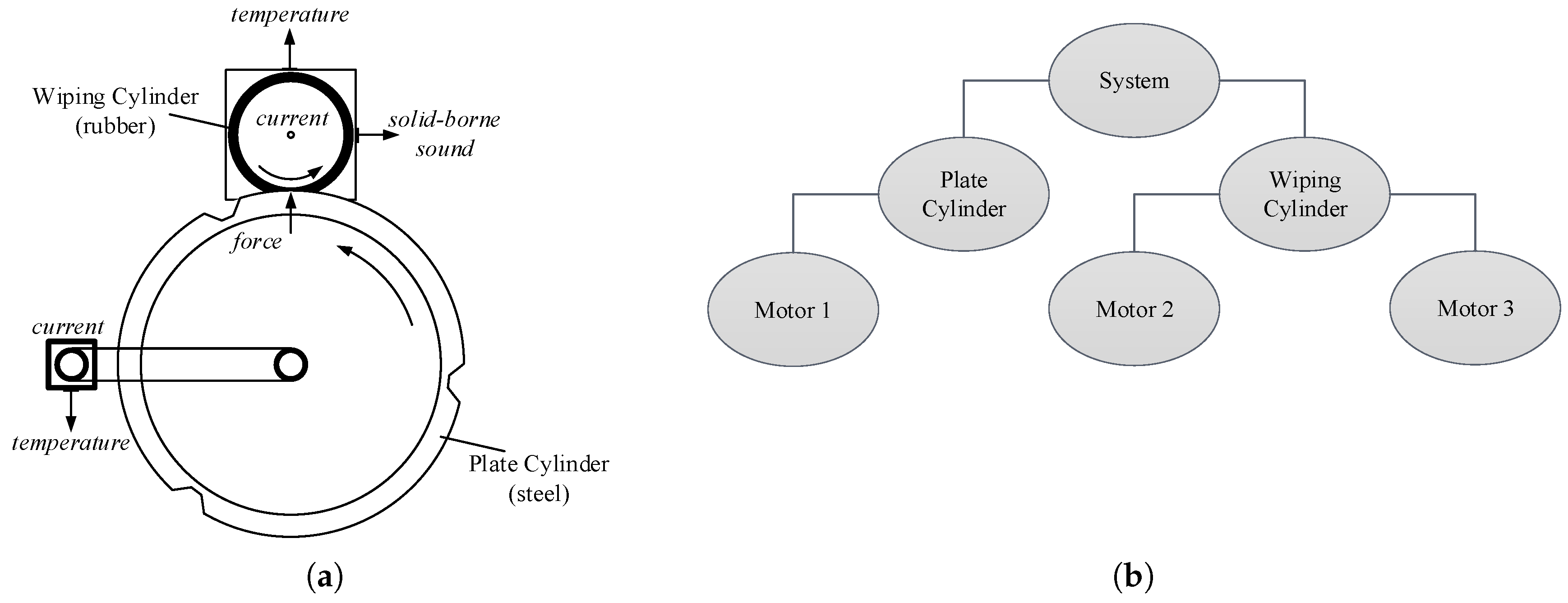
| Solid Sensor | Physical Phenomenon | Dimensionality | Associated Object |
|---|---|---|---|
| temperature | 1 | Motor 1 | |
| temperature | 1 | Motor 2 | |
| current consumption | 1 | Motor 1 | |
| current consumption | 1 | Motor 2 | |
| solid-borne sound | 1 | Wiping Cylinder | |
| contact force | 1 | Wiping Cylinder | |
| acoustic | 1 | System |
| Algorithm | Type | Physical Phenomena | Input Dimensionality |
|---|---|---|---|
| mean operator | temperature, current consumption | 1 | |
| variance operator | acoustic, solid-borne sound, contact force | 1 |
| Intelligent Sensor | Solid Sensors | Algorithms |
|---|---|---|
| Intelligent Sensor 1 | ||
| Intelligent Sensor 2 | ∅ | |
| Intelligent Sensor 3 |
| Feature | Sensor | Algorithm | Algorithm Type | Physical Phenomenon | Associated Object |
|---|---|---|---|---|---|
| mean operator | temperature | Motor 1 | |||
| mean operator | temperature | Motor 2 | |||
| mean operator | current consumption | Motor 1 | |||
| mean operator | current consumption | Motor 2 | |||
| variance operator | solid-borne sound | Wiping Cylinder | |||
| variance operator | contact force | Wiping Cylinder | |||
| variance operator | acoustic | System |
| Attribute | Attribute Type | Characteristic | Associated Object | |
|---|---|---|---|---|
| physical | temperature | System | ||
| physical | current consumption | System | ||
| module | Wiping Cylinder | |||
| module | Plate Cylinder | |||
| functional | running smoothness | System |
| Feature | Sensor | Algorithm | Associated Object |
|---|---|---|---|
| Motor 1 | |||
| Motor 2 | |||
| Wiping Cylinder | |||
| System |
| Attribute | Attribute Type | Characteristic | Associated Object | |
|---|---|---|---|---|
| physical | temperature | System | ||
| functional | running smoothness | System |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fritze, A.; Mönks, U.; Holst, C.-A.; Lohweg, V. An Approach to Automated Fusion System Design and Adaptation. Sensors 2017, 17, 601. https://doi.org/10.3390/s17030601
Fritze A, Mönks U, Holst C-A, Lohweg V. An Approach to Automated Fusion System Design and Adaptation. Sensors. 2017; 17(3):601. https://doi.org/10.3390/s17030601
Chicago/Turabian StyleFritze, Alexander, Uwe Mönks, Christoph-Alexander Holst, and Volker Lohweg. 2017. "An Approach to Automated Fusion System Design and Adaptation" Sensors 17, no. 3: 601. https://doi.org/10.3390/s17030601
APA StyleFritze, A., Mönks, U., Holst, C. -A., & Lohweg, V. (2017). An Approach to Automated Fusion System Design and Adaptation. Sensors, 17(3), 601. https://doi.org/10.3390/s17030601