
Use of the Magnetic Field for Improving Gyroscopes’ Biases Estimation


Abstract
:1. Introduction
2. Methods Used for the Evaluation
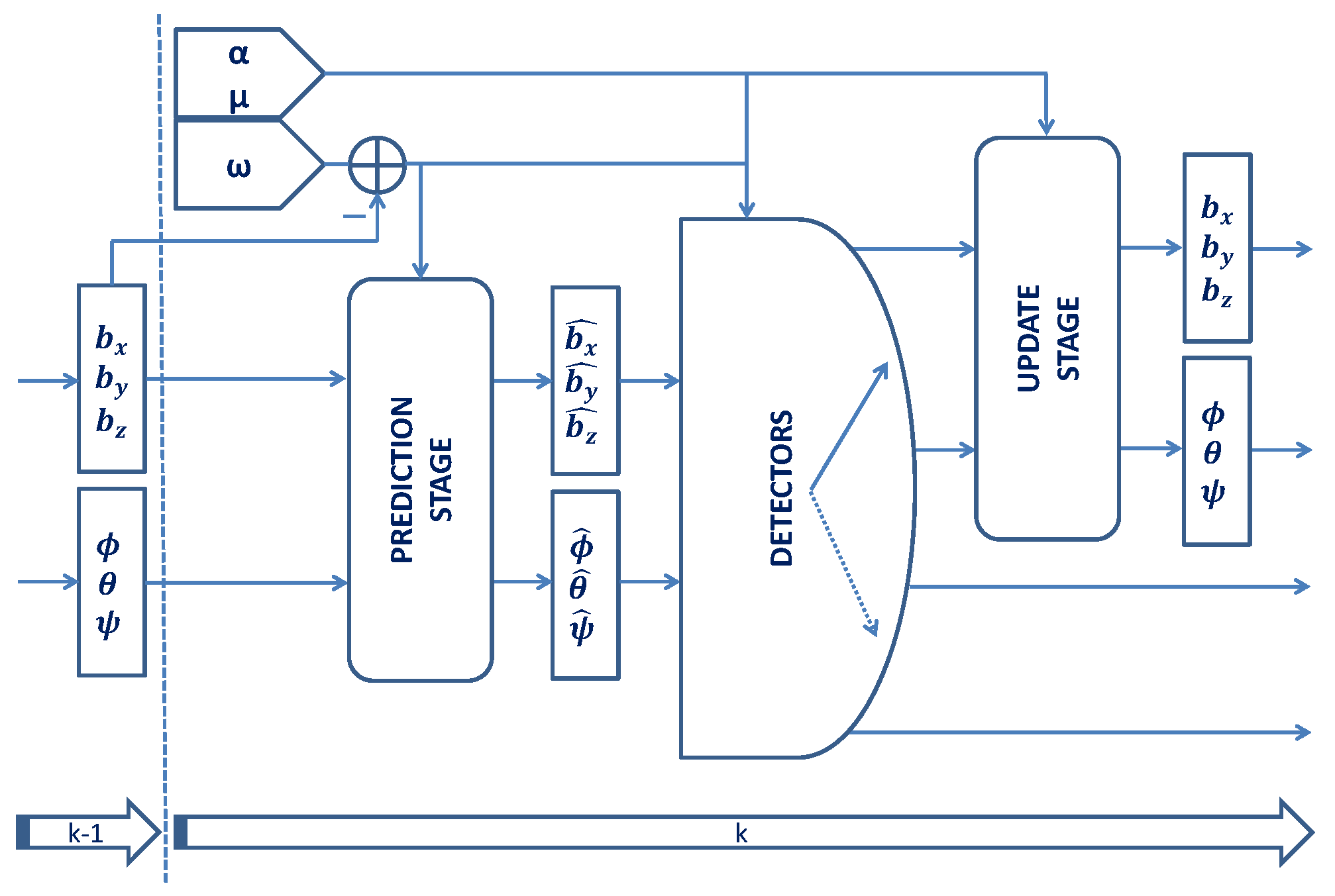
2.1. Orientation Estimation Filter
2.1.1. Prediction Stage
2.1.2. Detectors
2.1.3. Update Stage
Absolute Gravity Update
Differential Magnetic Field Update
2.2. Generation of the Emulated Magnetic Field
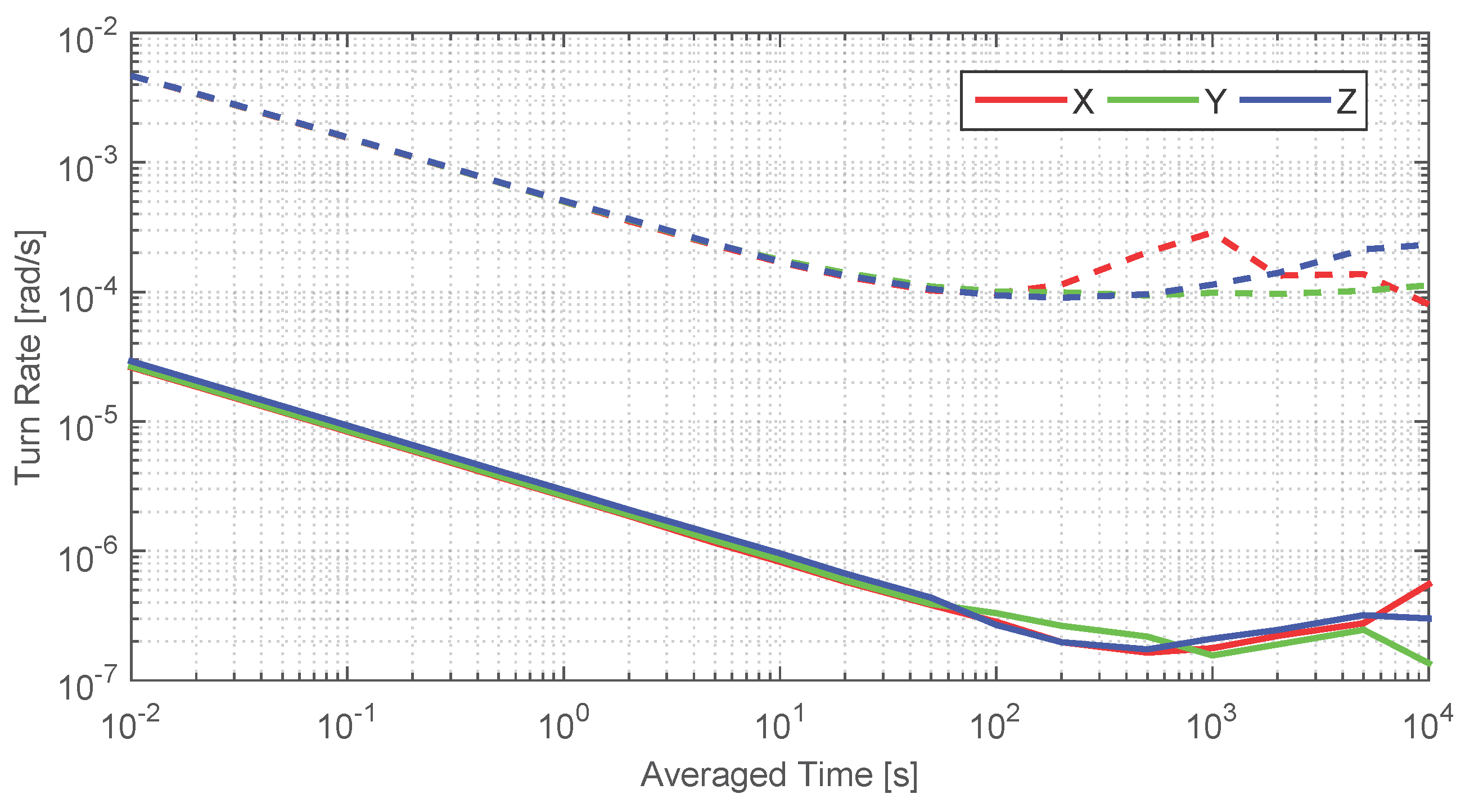
FOG Turn Rate Measurements
3. Results
3.1. Evaluation with IMU DSP-1750 Measurements
3.1.1. Biases Estimation without Using Magnetic Field Measurements
3.1.2. Biases Estimation Using Magnetic Measurements from Homogeneous Field
3.1.3. Biases Estimation Using Magnetic Measurements from Perturbed Field
3.1.4. Effect of the Biases Estimation on the Yaw Angle
3.2. Evaluation with Medium-Cost MEMS Measurements
3.2.1. Biases Estimation Using Magnetic Measurements from Real Homogeneous Field
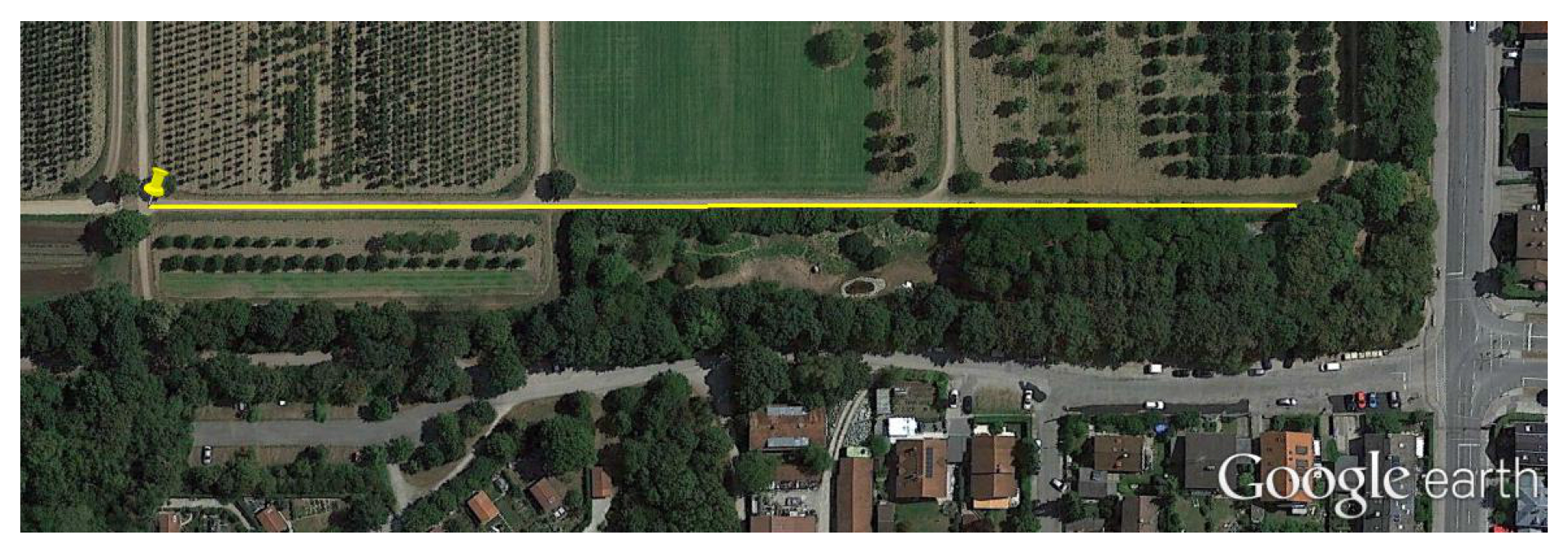
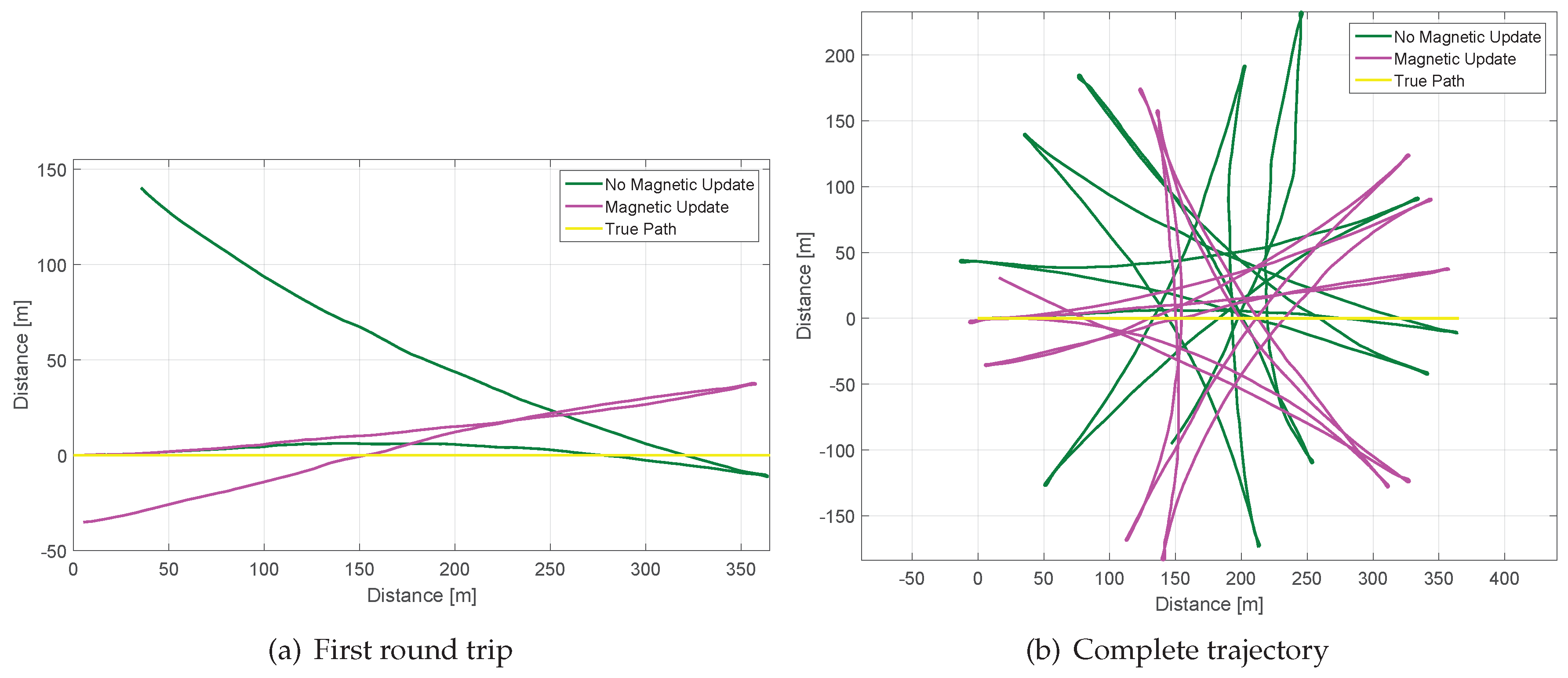
3.2.2. Effect of the Biases Estimation on the Trajectory
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Szalai, A. The Use of Time: Daily Activities of Urban and Suburban Populations in Twelve Countries; Mouton, 1972. Available online: https://trid.trb.org/view.aspx?id=1150665 (accessed on 7 April 2017).
- Madgwick, S. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays; Report x-io and University of Bristol: Bristol, UK, 2010. [Google Scholar]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Autom. Control 2008, 53, 1203–1217. [Google Scholar] [CrossRef]
- Munoz Diaz, E.; Jimenez, A.; de Ponte Müller, F.; Zampella, F. Evaluation of AHRS Algorithms for Inertial Personal Localization in Industrial Environments. In Proceedings of the IEEE International Conference on Industrial Technology, Seville, Spain, 17–19 March 2015. [Google Scholar]
- Zhang, Z.Q.; Meng, X.L.; Wu, J.K. Quaternion-Based Kalman Filter With Vector Sesection for Accurate Orientation Tracking. IEEE Trans. Instrum. Meas. 2012, 61, 2817–2824. [Google Scholar] [CrossRef]
- Azfal, M.; Renaudin, V.; Lachapelle, G. Use of Earth’s Magnetic Field for Mitigating Gyroscope Errors Regardless of Magnetic Perturbation. Sensors 2011, 11, 11390–11414. [Google Scholar]
- Lee, M.S.; Ju, H.; Woo, J.; Song, J.W.; Park, C.G. Kinematic Model-Based Pedestrian Dead Reckoning for Heading Correction and Lower Body Motion Tracking. Sensors 2015, 15, 28129–28153. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Yu, S.; Liu, C.; Yuan, X.; Liu, S. A Dual-Linear Kalman Filter for Real-Time Orientation Determination System Using Low-Cost MEMS Sensors. Sensors 2016, 16, 264. [Google Scholar] [CrossRef] [PubMed]
- Ali, A.; Siddharth, S.; Syed, Z.; El-Sheimy, N. Swarm Optimization-Based Magnetometer Calibration for Personal Handheld Devices. Sensors 2012, 12, 12455–12472. [Google Scholar] [CrossRef]
- Gozick, B.; Subbu, K.; Dantu, R.; Maeshiro, T. Magnetic Maps for Indoor Navigation. IEEE Trans. Instrum. Meas. 2011, 60, 3883–3891. [Google Scholar] [CrossRef]
- Li, J.; Jiancheng, F.; Du, M. Errror Analysis and Gyro-Bias Calibration of Analytic Coarse Alignment for Airbone POS. IEEE Trans. Instrum. Meas. 2012, 61, 3058–3064. [Google Scholar]
- Zhang, Z.Q.; Yang, G.Z. Calibration of Miniature Inertial and Magnetic Sensor Units for Robust Attitude Estimation. IEEE Trans. Instrum. Meas. 2014, 63, 711–718. [Google Scholar] [CrossRef]
- Fan, C.; Hu, X.; He, X.; Tang, K.; Luo, B. Observability Analysis of a MEMS INS/GPS Integration System with Gyroscope G-Sensitivity Errors. Sensors 2014, 14, 16003–16016. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Li, H.; Kou, Z.; Shi, Y.; Tang, J.; Ma, Z.; Shen, C.; Liu, J. Optimization and Experimentation of Dual-Mass MEMS Gyroscope Quadrature Error Correction Methods. Sensors 2015, 15, 9156–9178. [Google Scholar] [CrossRef] [PubMed]
- Pasciuto, I.; Ligorio, G.; Bergamini, E.; Vannozzi, G.; Sabatini, A.M.; Cappozzo, A. How Angular Velocity Features and Different Gyroscope Noise Types Interact and Determine Orientation Estimation Accuracy. Sensors 2015, 15, 23983–24001. [Google Scholar] [CrossRef] [PubMed]
- Bancroft, J.B.; Lachapelle, G. Use of Magnetic Quasi Static Field (QSF) Updates for Pedestrian Navigation. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar]
- Zampella, F.; Khider, M.; Robertson, P.; Jimenez, A. Unscented Kalman Filter and Magnetic Angular Rate Update (MARU) for an Improved Pedestrian Dead-Reckoning. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems; Research Institute for Advanced Study: Baltimore, MD, USA, 1960. [Google Scholar]
- Wagner, J.; Wieneke, T. Integrating Satellite and Inertial Navigation—Conventional and New Fusion Approaches. Control Eng. Pract. 2003, 11, 543–550. [Google Scholar] [CrossRef]
- Wertz, J. Spacecraft Attitude Determination and Control; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Munoz Diaz, E. Inertial Pocket Navigation System: Unaided 3D Positioning. Sensors 2015, 15, 9156–9178. [Google Scholar] [CrossRef] [PubMed]
- Munoz Diaz, E.; Heirich, O.; Khider, M.; Robertson, P. Optimal Sampling Frequency and Bias Error Modeling for Foot-Mounted IMUs. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, J.O.; Skog, I.; Handel, P. Performance characterisation of foot-mounted ZUPT-aided INSs and other related systems. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Munoz Diaz, E.; Mendiguchia Gonzalez, A.L.; de Ponte Müller, F. Standalone Inertial Pocket Navigation System. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Renaudin, V.; Combettes, C. Magnetic, Acceleration Fields and Gyroscope Quaternion (MAGYQ)-Based Attitude Estimation with Smartphone Sensors for Indoor Pedestrian Navigation. Sensors 2014, 14, 22864–22890. [Google Scholar] [CrossRef] [PubMed]
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: London, UK, 2013. [Google Scholar]
- IMU DSP-1750 from KVH, USA. Available online: http://www.kvh.com/Military-and-Government/Gyros-and-Inertial-Systems-and-Compasses/Gyros-and-IMUs-and-INS/IMUs/1750-IMU.aspx (accessed on 10 April 2017).
- MEMS MTw from Xsens, The Netherlands. Available online: https://www.xsens.com/products/mtw-development-kit-lite (accessed on 10 April 2017).
- Munich Earth Observatory. Monthly Magnetograms. Available online: http://www.geophysik.uni-muenchen.de/observatory/geomagnetism (accessed on 10 April 2017).
- Jackson, J.D. Classical Electrodynamics, 3rd ed.; John Wiley and Sons: New York, NY, USA, 1999. [Google Scholar]
- The Institute of Electrical and Electronics Engineers. IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros; IEEE Std 952-1997; IEEE: Hoboken, NJ, USA, 1998; pp. 1–84. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| North Pole | Equator | Munich |
|---|---|---|
| 65 [0, 0, −1] | 25 [0, 1, 0] | 48 [0, cos(64 ), –sin(64 )] |
| v [ s] | b [ s] | [T] | |
|---|---|---|---|
| x-axis | 0.1 | −0.1 | 0.015 |
| y-axis | 0.1 | 0.1 | 0.015 |
| z-axis | 0.1 | −0.1 | 0.015 |
| x-axis | y-axis | z-axis | |
|---|---|---|---|
| Start | −0.12 | 0.06 | −0.12 |
| End | −0.13 | 0.05 | −0.22 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munoz Diaz, E.; De Ponte Müller, F.; García Domínguez, J.J. Use of the Magnetic Field for Improving Gyroscopes’ Biases Estimation. Sensors 2017, 17, 832. https://doi.org/10.3390/s17040832
Munoz Diaz E, De Ponte Müller F, García Domínguez JJ. Use of the Magnetic Field for Improving Gyroscopes’ Biases Estimation. Sensors. 2017; 17(4):832. https://doi.org/10.3390/s17040832
Chicago/Turabian StyleMunoz Diaz, Estefania, Fabian De Ponte Müller, and Juan Jesús García Domínguez. 2017. "Use of the Magnetic Field for Improving Gyroscopes’ Biases Estimation" Sensors 17, no. 4: 832. https://doi.org/10.3390/s17040832
APA StyleMunoz Diaz, E., De Ponte Müller, F., & García Domínguez, J. J. (2017). Use of the Magnetic Field for Improving Gyroscopes’ Biases Estimation. Sensors, 17(4), 832. https://doi.org/10.3390/s17040832