1. Introduction
The Synthetic Aperture Radar (SAR) is a well-established and efficient imaging technique for acquiring high-spatial-resolution (generally called high-resolution), wide-swath images of the Earth’s surface due to its all-time and all-weather imaging ability. Since the first civilian spaceborne SAR, Seasat, was launched in 1978 [
1], significant progress has been made in this area. As listed in
Table 1, with the launch of the SAR satellites Radarsat-2, TerraSAR-X, TanDEM-X, Sentinel-1a and ALOS-2, the resolution of spaceborne SAR has been upgraded from tens of meters to the meter region [
2,
3,
4,
5,
6,
7,
8,
9,
10]. By employing beam steering techniques, TerraSAR-X Next Generation (TerraSAR-X NG) system will achieve a resolution of up to 0.25 meters, thereby being capable of identifying vehicles or objects of a similar size [
11].
In addition to the strengthened high-resolution and wide-swath capability, high-temporal-resolution (short repeat-observation interval) would be another key capability for numerous applications [
12]. It is necessary to point out that repeat-observation interval means the temporal gap between acquisitions of two images of the same area. Currently, on-orbit SAR systems can provide products with repeat-observation intervals varying from hours to a day, over a day to weeks by employing satellite constellations or left-and-right looking operation. For example, the images obtained by Radarsat-1/2 have been used for monitoring seasonally or permanently ice-covered ocean regions in the Arctic Ocean [
13]. Moreover, the COSMO-SkyMed constellation has provided a sequence of 7 stripmap images with one day repeat-observation interval to monitor the flooding of the Severn and Avon rivers [
14].
Moreira and his colleagues from the German Aerospace Center (DLR) have noted that users request time series of high-resolution radar images that are acquired using repetition intervals that are as short as possible to study dynamic processes on the Earth’s surface [
15]. Additionally, in 2001, Madsen and Edelstein of Jet Propulsion Laboratory (JPL) proposed that the fine temporal sampling or time series of rapidly evolving phenomena would be essential for disaster management for, e.g., flooding, fires, landslides, hurricanes, and earthquakes [
12]. Hence, products with high-temporal-resolution are predicted to play a significant role in urgent applications, although current spaceborne systems are proving to be limited in regard to their acquisition capability. The TerraSAR-X and TanDEM-X constellation, with an along-track separation of approximately 3 s, has demonstrated the feasibility of using multiple platforms for the purpose of short repeat-observation interval products, regardless of economic costs [
16]. Moreover, geosynchronous SAR would be another potential technique due to its short repeat period.
In general, the acquisition capability of SAR systems is limited based on their maximum squint angle (here, the squint angle is defined as the deviation from the broadside). Hence, we propose a novel high-squint-angle system intended to acquire short repeat-observation interval and high-resolution Spaceborne SAR images with a single pass and a single platform. In addition to applications with high-temporal-resolution, which will mainly benefit from the strengthened squint illumination capability, large area applications will also be supported:
Comprehensive information analysis of targets, based on the higher resolution, separate angle and shorter repeat-observation interval images provided by high-squint SAR systems, will enable more precise recognition and identification.
Higher quality SAR images, with reduced effects from speckle, which can be reduced through the use of multi-look images, can be obtained because high-resolution and short repeat-observation interval images can reduce speckle efficiently and without a loss of resolution.
Two key factors should be considered in the proposed concept. The first factor is a high-resolution implementation mode, which would be achieved through illumination of the same ground patch for the duration of the coherent time. To satisfy the demands for high-resolution SAR in many civilian applications, the sliding spotlight mode and the staring spotlight mode have been employed in TerraSAR-X. By focusing the antenna beam to a fixed point, the synthetic aperture length for every scattering point is increased, resulting in a higher resolution.
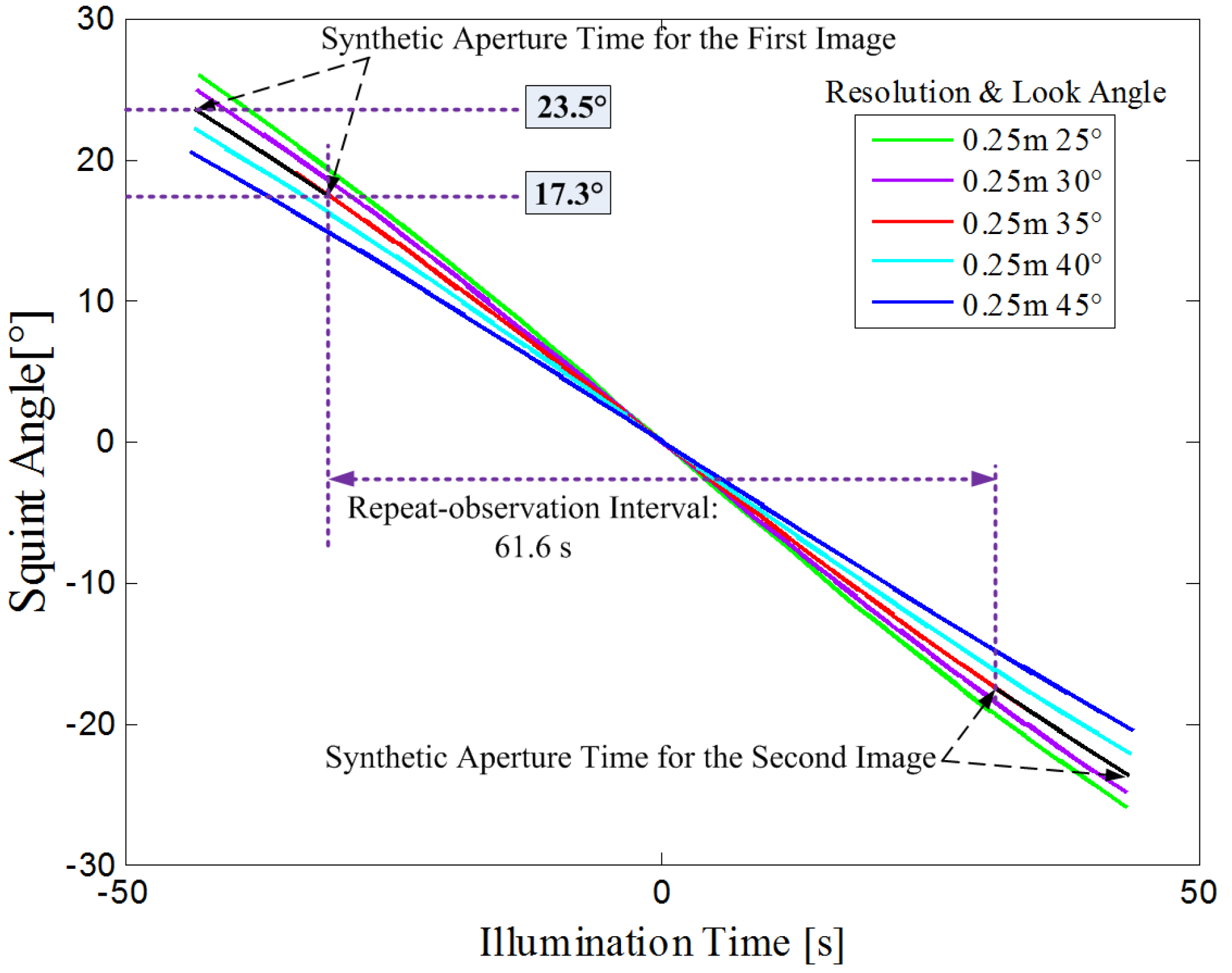
Secondly, repeat-observation intervals varying from tens of seconds to several minutes require high squint illumination capability. Consider a planar antenna system similar to TerraSAR-X, as specified in
Table 2. The squint angle as a function of illumination time for different look angles is represented in
Figure 1, where the required squint angle for one minute repeat-observation interval increases along with a decreasing look angles. For instance, when the look angle is chosen as 35.0
, the first image would be achieved with squint angle between 23.5
and 17.3
, and the second image would be achieved with squint angle between −17.3
and −23.5
. Squint angle from 17.3
to −17.3
is the gap for the repeat-observation interval of 61.6 s.
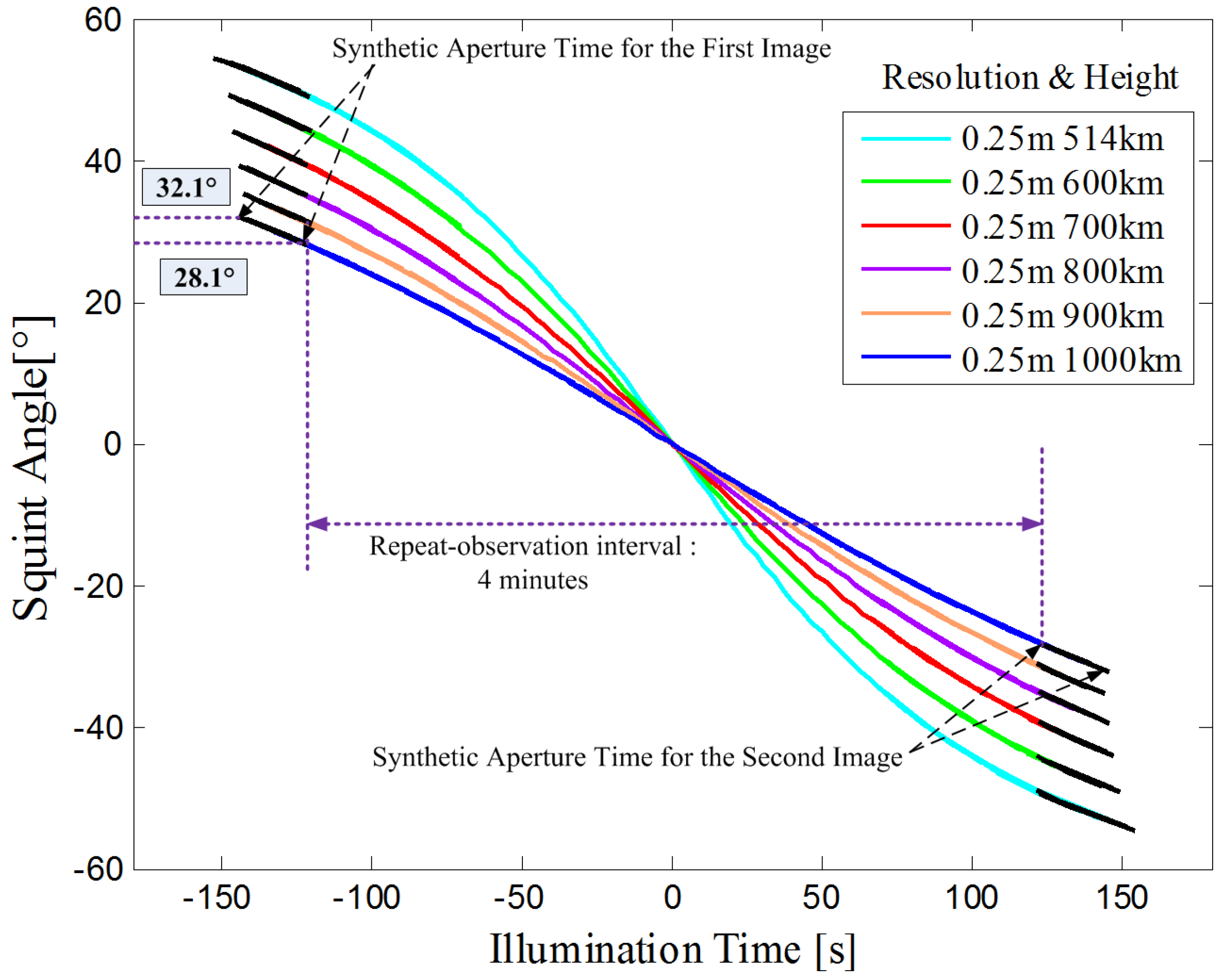
The squint angle as a function of illumination time for different orbit height is also represented in
Figure 2, where the required squint angle decreases along with an increasing orbit height. For instance, with an orbit height of 1000 km, images with repeat-observation intervals varying from tens of seconds to 4 min will be available when the squint angle is higher than 32.1
.
In general, the maximum of repeat-observation intervals mainly depends on orbit height and squint angle. Without loss of generality, we take one minute repeat-observation interval as an example to clarify the proposed technique, and the following simulations are based on parameters in
Table 2.
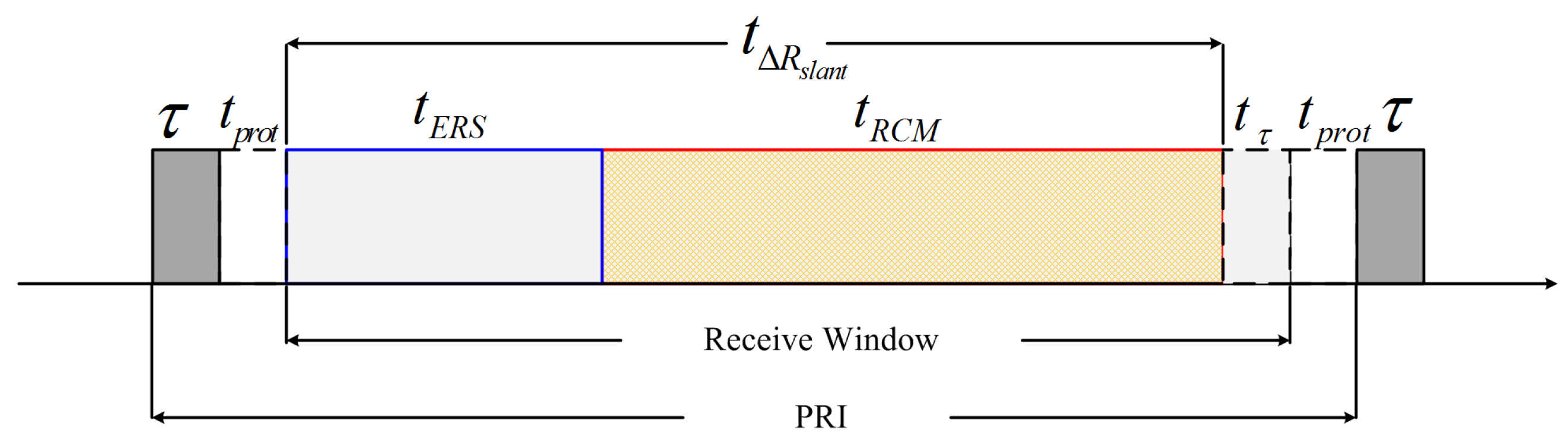
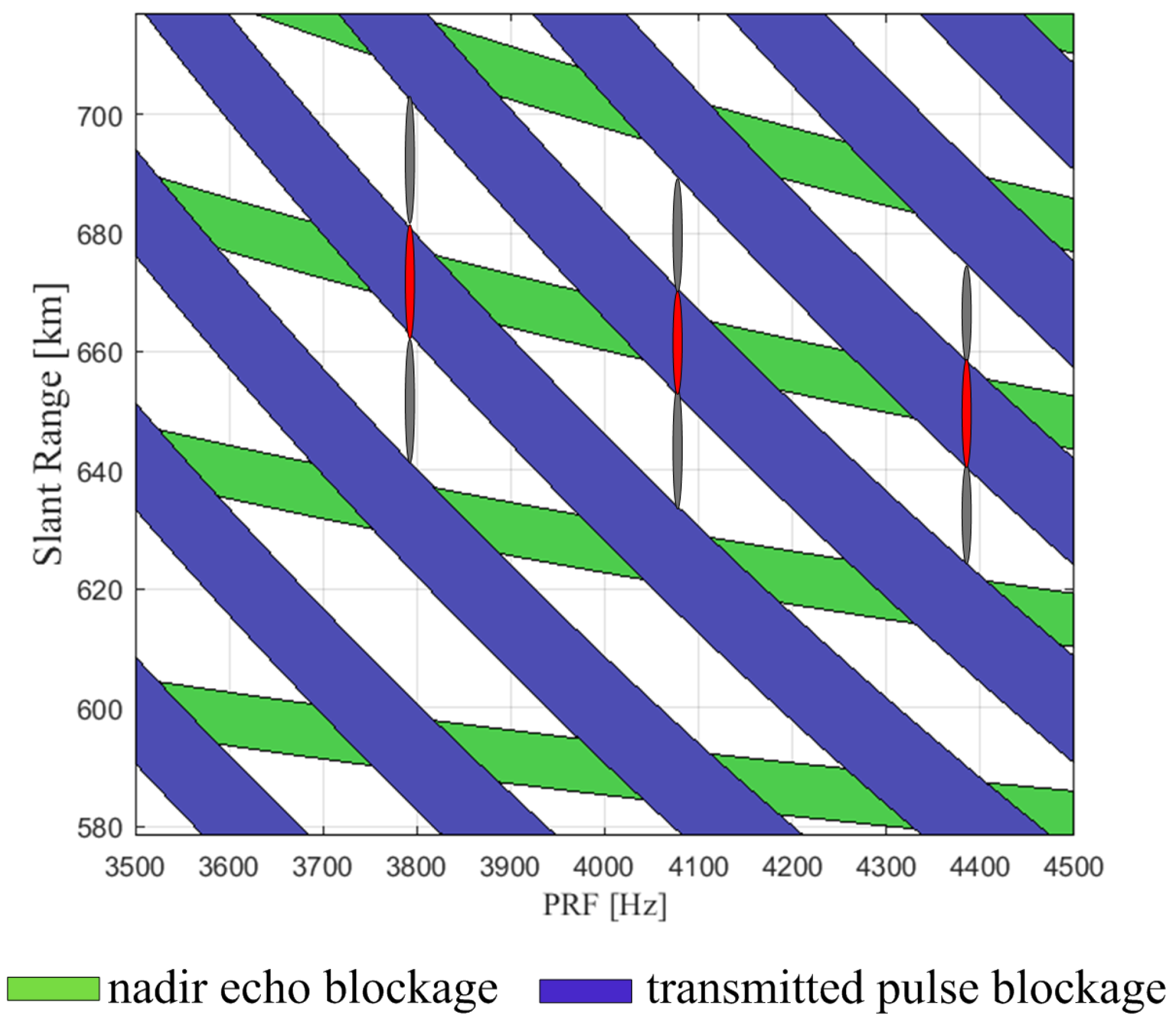
For SAR systems, high squint angle would cause an increased range cell migration (RCM), which leads to a contradiction between the receive window and ‘blind ranges’ (e.g., nadir echo blockage and transmit pulse blockage). Compared with the conventional stripmap SAR, the RCM of the sliding spotlight and staring spotlight modes at high squint angles takes a substantially greater percentage of the receive window (
Figure 3), thereby resulting in a narrow imagery swath.
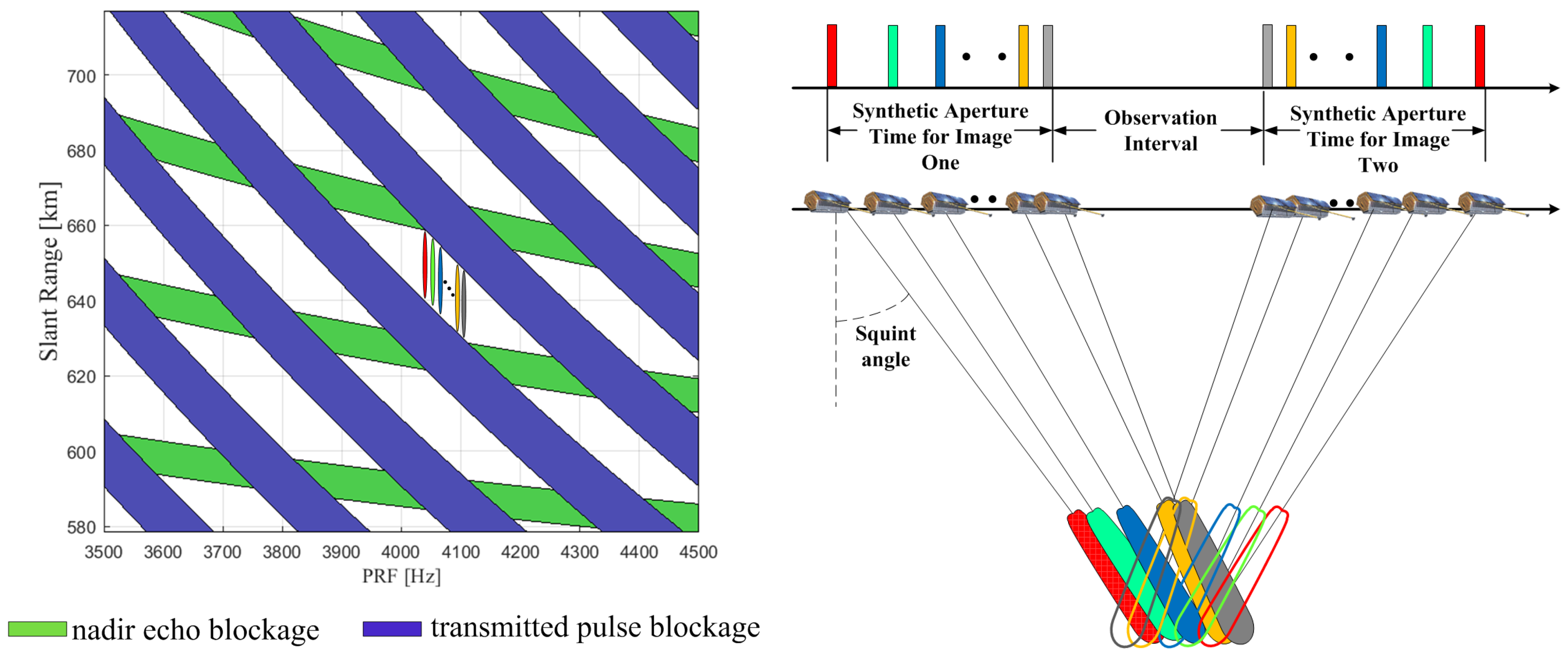
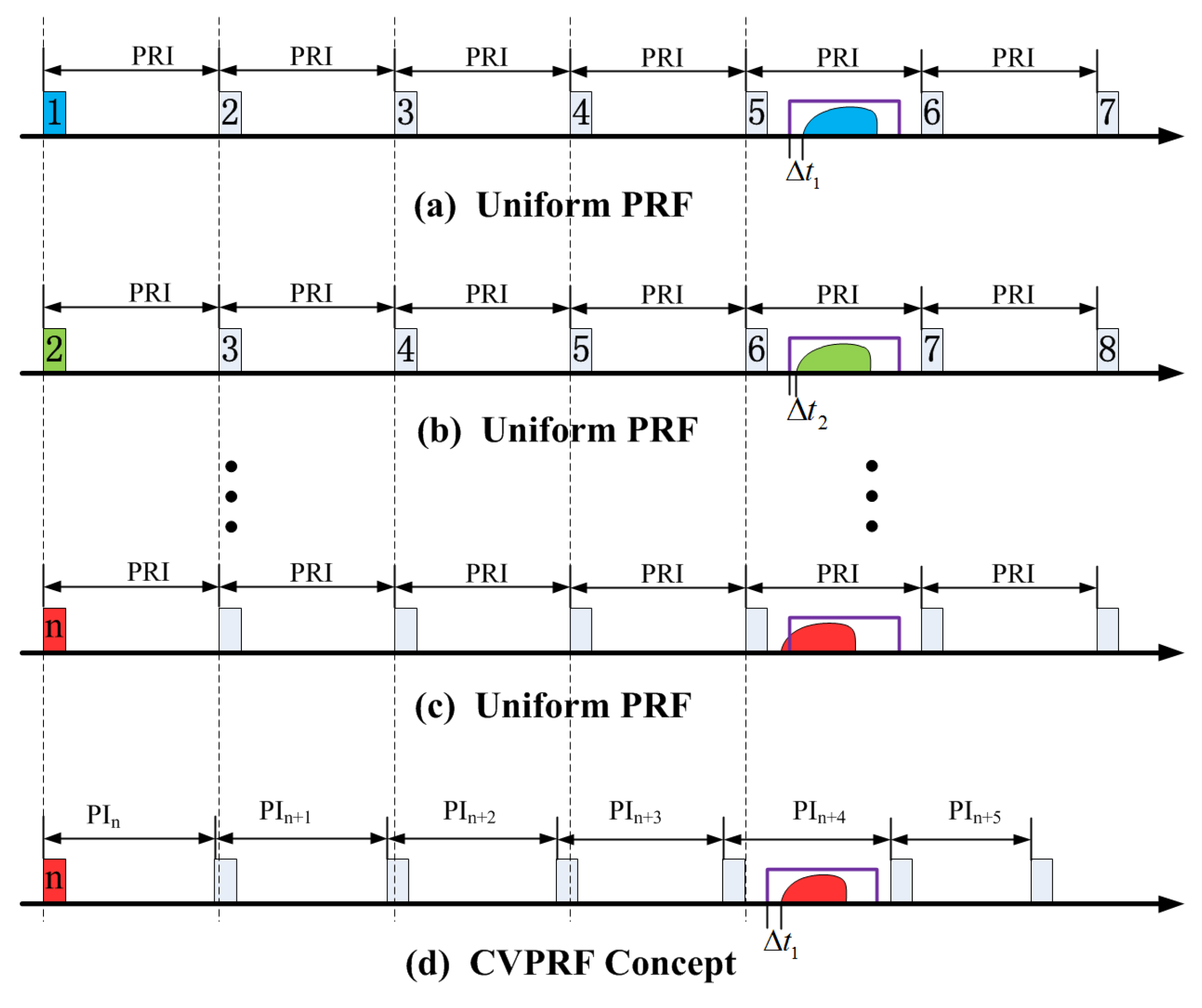
The concept of continuously varying PRF (CVPRF) is proposed to overcome this limitation, as shown in
Figure 4. With this technique, the RCM can be efficiently reduced by varying the PRF according to the changing slant range (defined as the range between SAR sensor and target) of each transmitted pulse. As apparent from the right of
Figure 4, the slant range decreases along with the decreasing squint angle during the acquisition of the first image. For example, to avoid transmitted pulse blockage and nadir echo blockage, we choose 4030 Hz for the red pulse, according to the timing diagram on the left. For the green pulse, the slant range decreases along with the decreasing squint angle. Under this condition, we need to change the PRF for the green pulse, because 4030 Hz is not suitable any more. Similarly, the suitable PRFs should also be changed for pulses with the other colors. For the second image, the suitable PRFs would vary inversely along with the increasing squint angle. Using this technique, echo data of all pulses can be received by SAR sensor and high-squint-angle SAR images can be achieved.
Several other continuous PRF variation concepts have been suggested for different purposes. To overcome the limitation of multibeam SAR systems, EADS Astrium and DLR both have proposed Staggered-SAR to image a large continuous swath, as illustrated in
Figure 5. According to [
17], the strategy of Staggered-SAR attempts to avoid transmitted pulse blockage at the expense of missing pulses for each target, which would lead to a degradation of imaging quality. However, for higher resolution, the missing pulses would increase exponentially, bringing more challenge to recover the missing samples by means of interpolation. The CVPRF technique proposed in this paper, varies the PRF according to the changing slant range, and every transmitted pulse is received efficiently. This technique is effective for high-spatial-resolution and high-squint-angle SAR systems.
This paper is organized as follows: In
Section 2, the CVPRF concept is presented in detail, therein showing how the limitation of the RCM is overcome. Moreover, a comparison concerning the data acquisition ability is presented. In
Section 3 and
Section 4, the design method of the sequence of the PRF is proposed, and range ambiguities are discussed. In
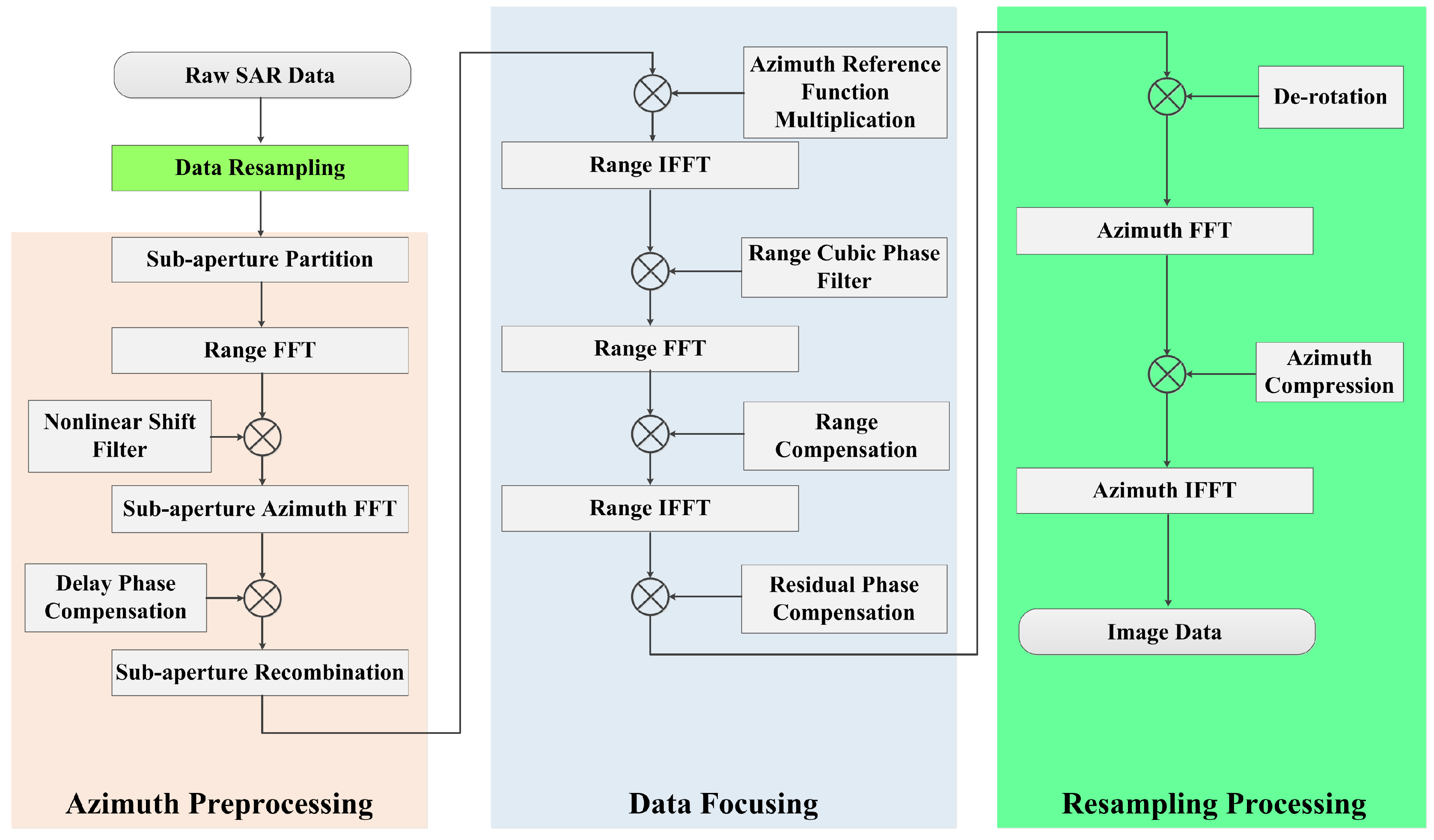
Section 5, the relevant imaging algorithm for high-resolution high-squint spaceborne SAR, based on CVPRF, is developed. In
Section 6, simulation results are provided, therein showing the accuracy of the resampling processing and the high-order imaging algorithm for the CVPRF concept. Conclusions are drawn in
Section 7.
2. CVPRF Concept
For spaceborne SAR systems, the antenna length imposes a lower bound on the selected PRF [
18]. In return, the PRF limits its ability to continuously acquire echo data in the slant range. As indicated in
Figure 3, the span of the slant range
, which is related to the length of the receive window, can be expressed as
where
c is the speed of light,
is the transmitted pulse duration, and
is the guard interval, which is usually equal to
.
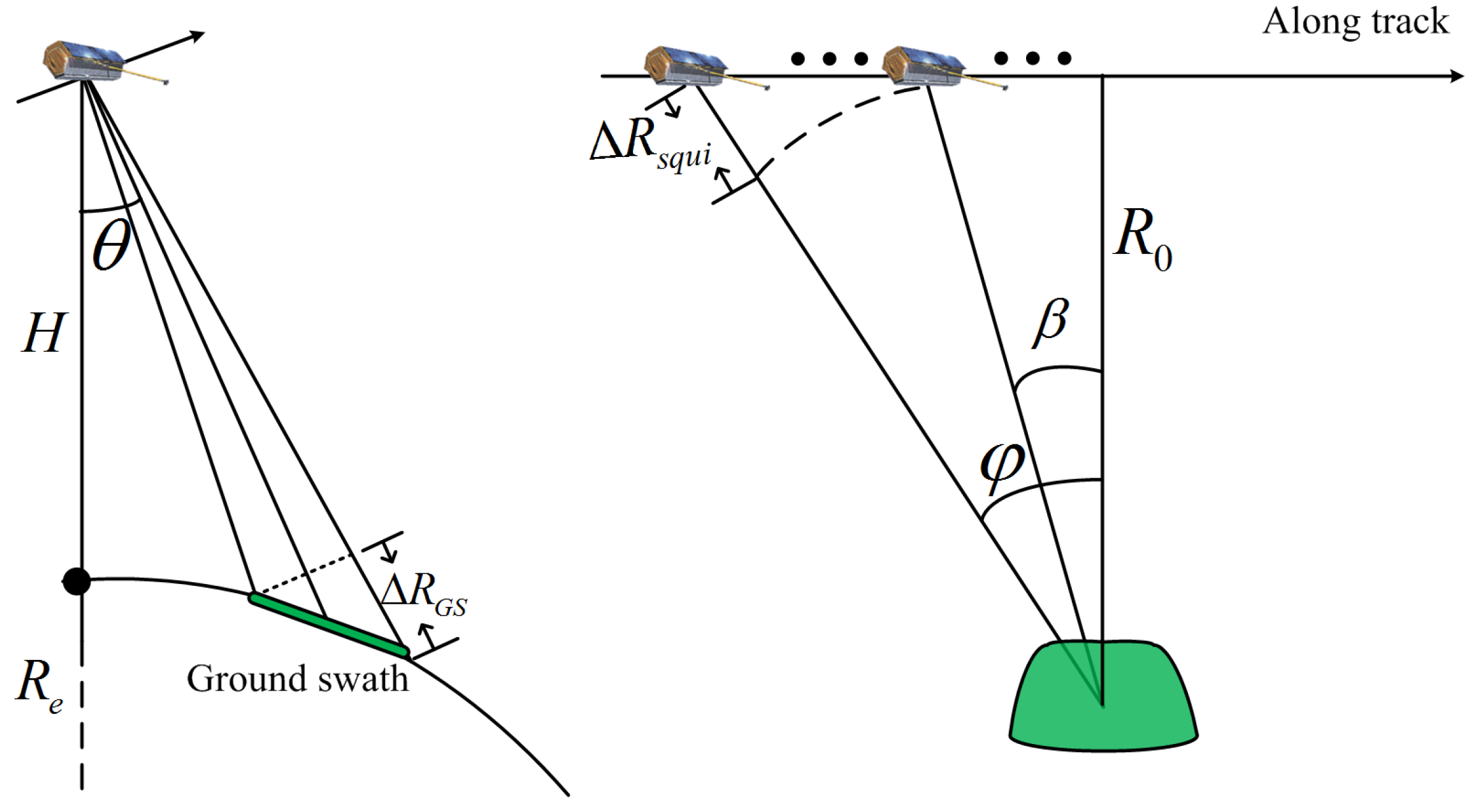
The span of the slant range consists of two parts:
(equivalent to
), caused by the ground swath in the range direction, as illustrated on the left of
Figure 6, and
(equivalent to
), caused by the squint illumination, as illustrated on the right of
Figure 6. The span of the slant range caused by the ground swath can be estimated by
where
is the ground swath,
is the Earth’s radius,
H is the orbit height, and
is the look angle.
For convenience of presentation, the path of the sensor is represented by a linear model. Of course, we need to note that the actual path is substantially more complicated for spaceborne SAR systems. Thus, the span of the slant range caused by the squint illumination can also be estimated by
where
is the slant range at the Doppler center time,
is the start illumination angle, and
is the end illumination angle.
With Equations (
2) and (
3), Equation (
1) can be expressed as
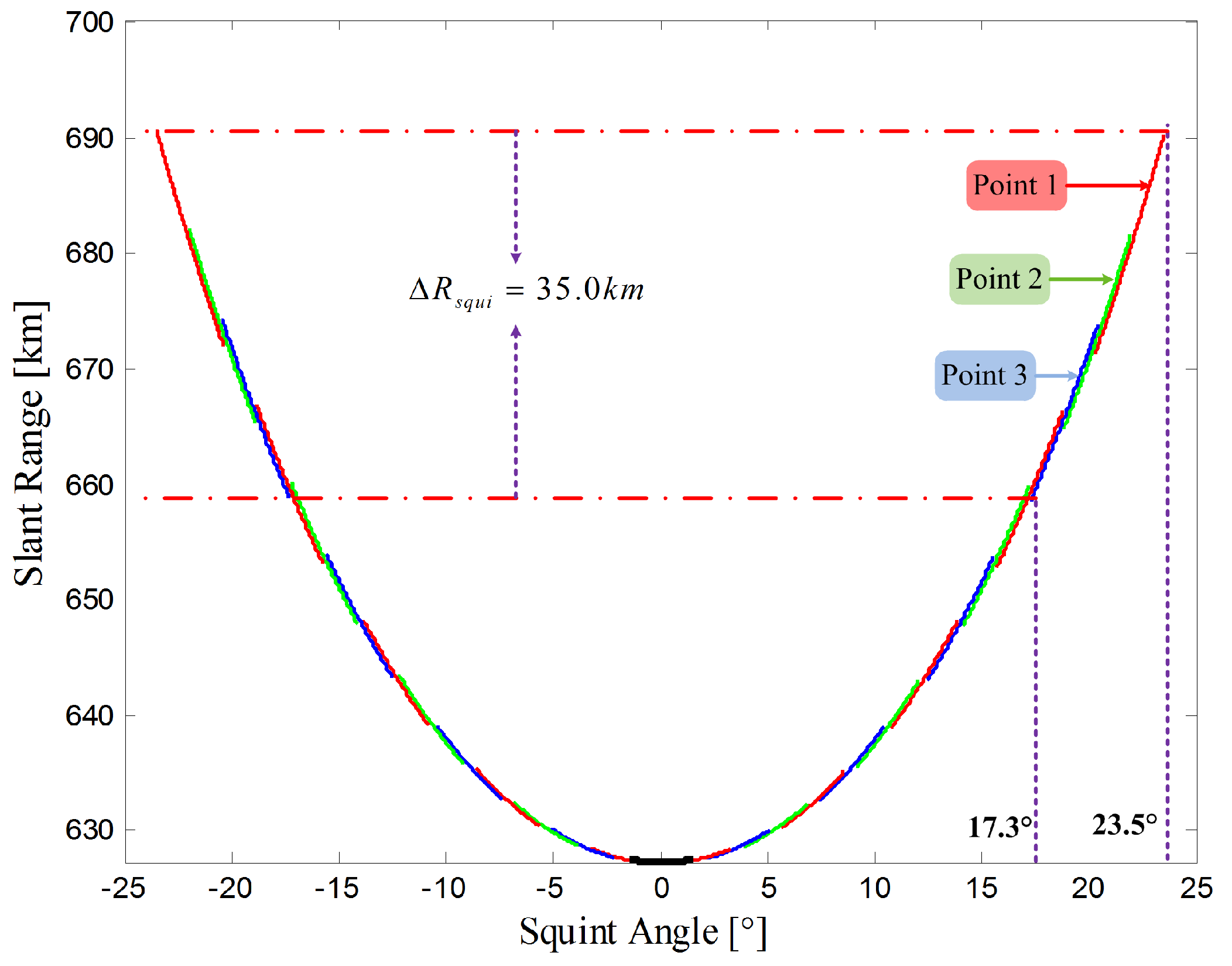
With the given orbit height, look angle, PRF and transmitted pulse duration, a compromise between ground swath and azimuth squint angle should be made. Since the antenna beam is always orthogonal to the flight direction for conventional stripmap SAR systems, the span of the slant range caused by squint illumination is negligible. However, for the sliding spotlight mode, apart from the factor of the ground range, the squint illumination angle must be considered. To obtain a more intuitive description of the factor
, simulations are performed. The slant range history of the sliding spotlight mode is illustrated in
Figure 7. The dark line represents the slant range history of the center target of the scene, similar to the conventional stripmap mode. With increasing squint angle, the spans of the slant range increase almost exponentially. Moreover, the distance between Point 1 and Point 3 is 5 km in azimuth, and the
for a 5 km azimuth swath is 35.0 km.
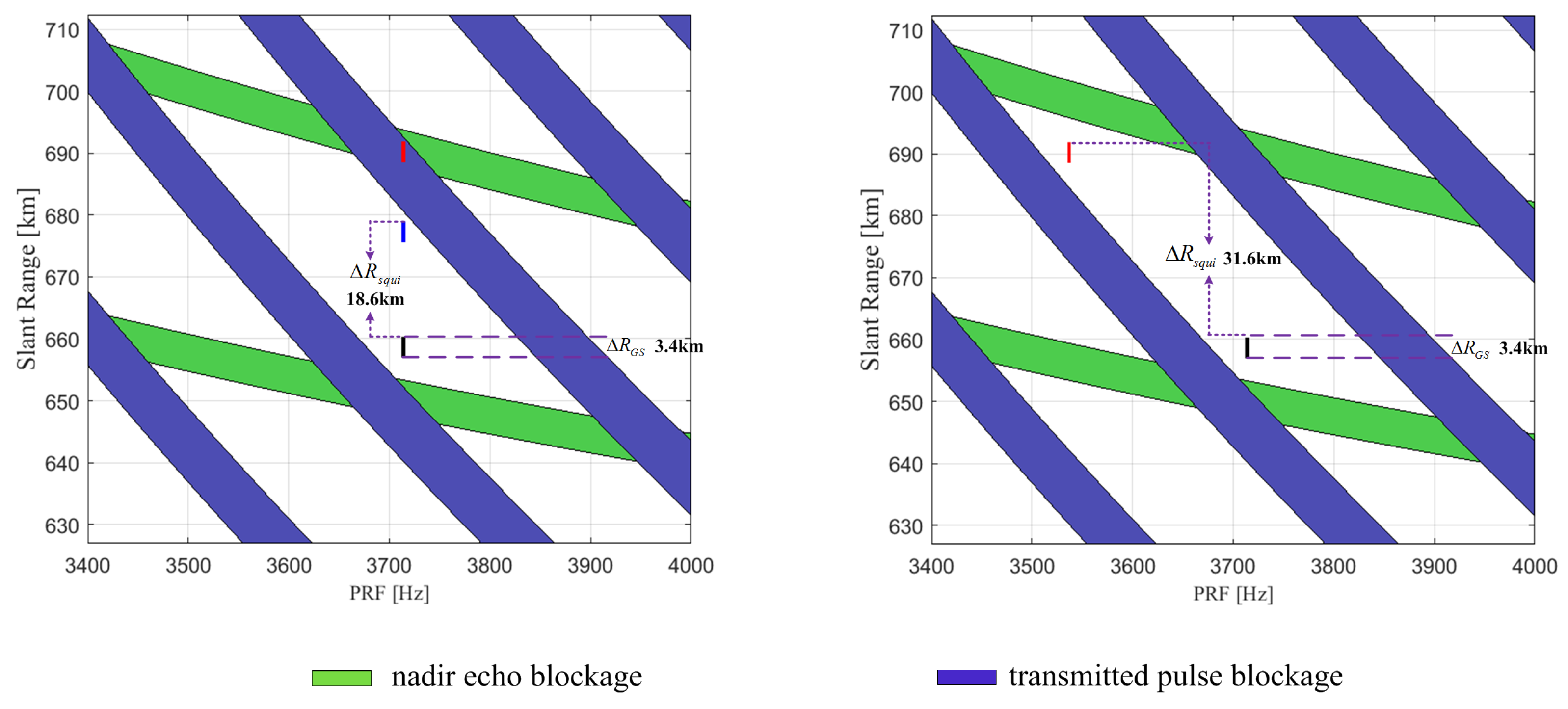
The comparison of the acquisition capability for a Uniform PRF system and a CVPRF system in the timing diagram would be necessary for a straightforward explanation. We consider a design example with the parameters listed in
Table 2, and the simulation results are shown in
Figure 8. Here, the dark solid line represents the slant range of a 5 km ground swath width with a squint angle of 17.3
, and the red solid line represents the slant range of a 5 km ground swath width with a squint angle of 23.5
. For the uniform PRF system, as apparent from the left of
Figure 8, the acquisition would be invalid due to the conflict between the echo data and the blind ranges, and the maximum of
is also limited to 18.6 km. However, this limitation would be overcome with the CVPRF system, where the PRF varies with the slant range. As shown on the right of
Figure 8, the maximum of
increases to 31.6 km, and the corresponding squint illumination angle can increase up to 23.5
.
During the acquisition of echo data, the slant range between the SAR sensor and the target varies with the squint angle, which causes a variation in the travel time for different pulses. As we know, for spaceborne SAR systems, the echo of a certain transmitted pulse will be received after several pulses. Without loss of generality, we assume a case in which the reflected pulse is received at the fifth PRI after being transmitted. As shown in
Figure 9, the duration between transmitting and receiving can be defined as
. Here,
represents the location of the echo data in the receive window. Given the above-mentioned considerations, the slant range varies with the squint angle, which means that the duration
cannot remain fixed, resulting in a changing
. For certain pulses, the echo data would overlap with the transmitted pulse, called blind ranges (
Figure 9c). If, instead of a constant PRF, a sequence of continuously varying pulse intervals, which change according to the slant range, is employed, the interval
would be unchanged and would keep the echo away from the blind ranges (
Figure 9d). Simulation result has validated the efficiency of the CVPRF technique, allowing echo data to remain in the receive window instead of conflicting with the transmitted pulse or nadir echo.
The comparisons in the timing diagram and in the diagram of the transmitted and received pulses have demonstrated the strengthened acquisition capability of the CVPRF system. Based on the aforementioned analysis, one minute repeat-observation interval images with a 0.25 m resolution and 5 km swath in both the azimuth and range would be practical with parameters similar to those of TerraSAR-X. The following section will analyze and propose an elaborate sequence of PRFs that leads to an efficient echo acquisition for the CVPRF system.
3. Design of the Sequence of PRF
As mentioned, the sequence of the continuously varying PRFs is designed according to the history of the slant range to keep the location of the echo data unchanged in the receive window. Consider a case in which the reflected pulse is received at the M-th pulse interval (PI) after being transmitted. To facilitate the calculation of , it will be necessary to assume that the pulse intervals from 1 to M-1 are equal to at the beginning of the calculation.
As shown in
Figure 10, the
k-th pulse is transmitted and received at
and
, respectively.
is the unknown variable that we need to solve based on the preceding pulse intervals
. Then, the transmit time of the
k-th pulse and the receive time of the
k-th pulse can be expressed as
where
denotes the
k-th transmitted pulse and
denotes the receiving of the
k-th transmitted pulse.
is the variable that we need to determine.
Using the equation as follows, we can obtain the optimal value of
by an iterative calculation. Both
and
can be accurately acquired via a high-precision simulation.
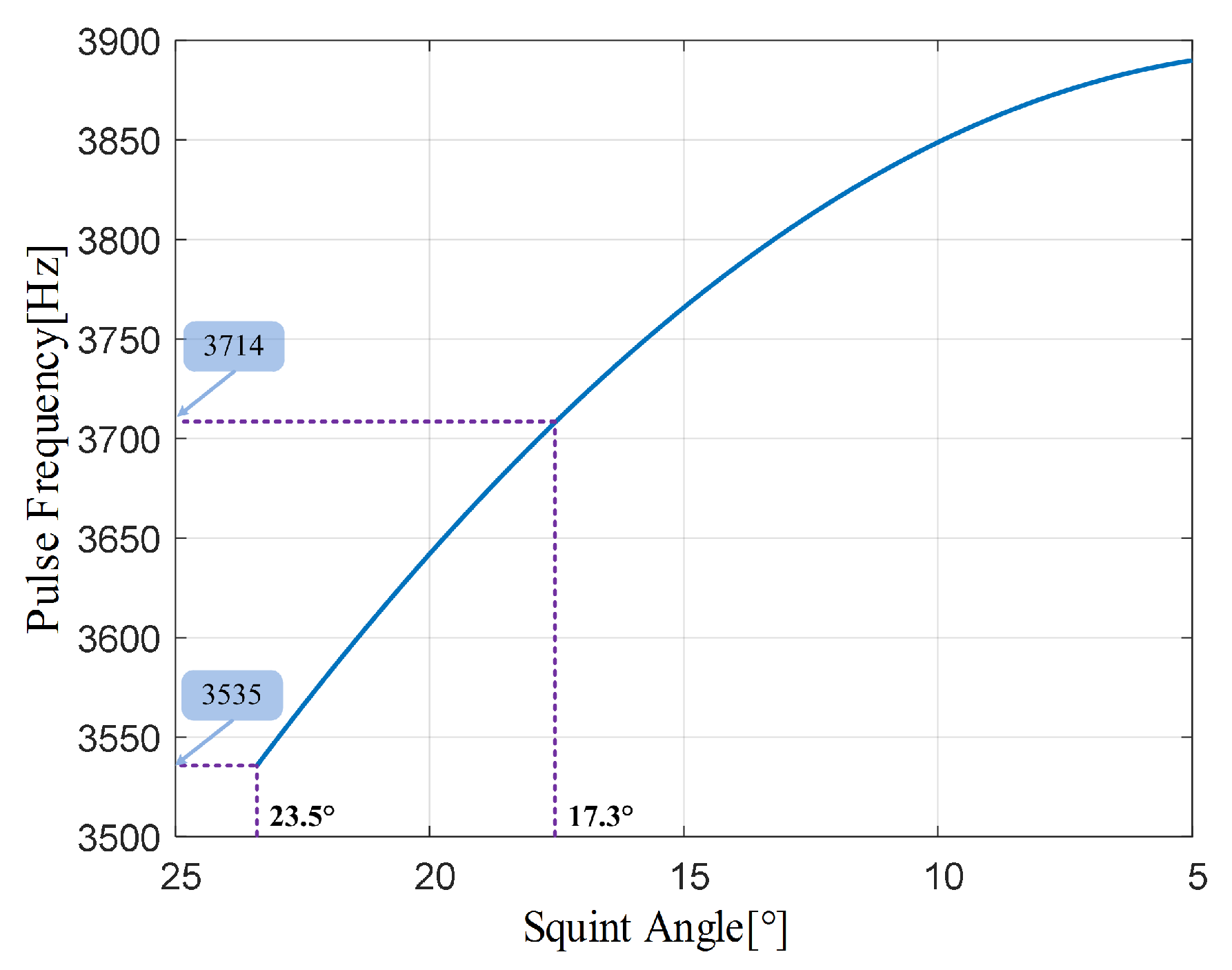
Figure 11 shows the result from a simulation performed with the orbit and radar parameters listed in
Table 2. The pulse frequency varies from 3535 Hz to 3714 Hz with decreasing squint angle from 23.5
to 17.3
.
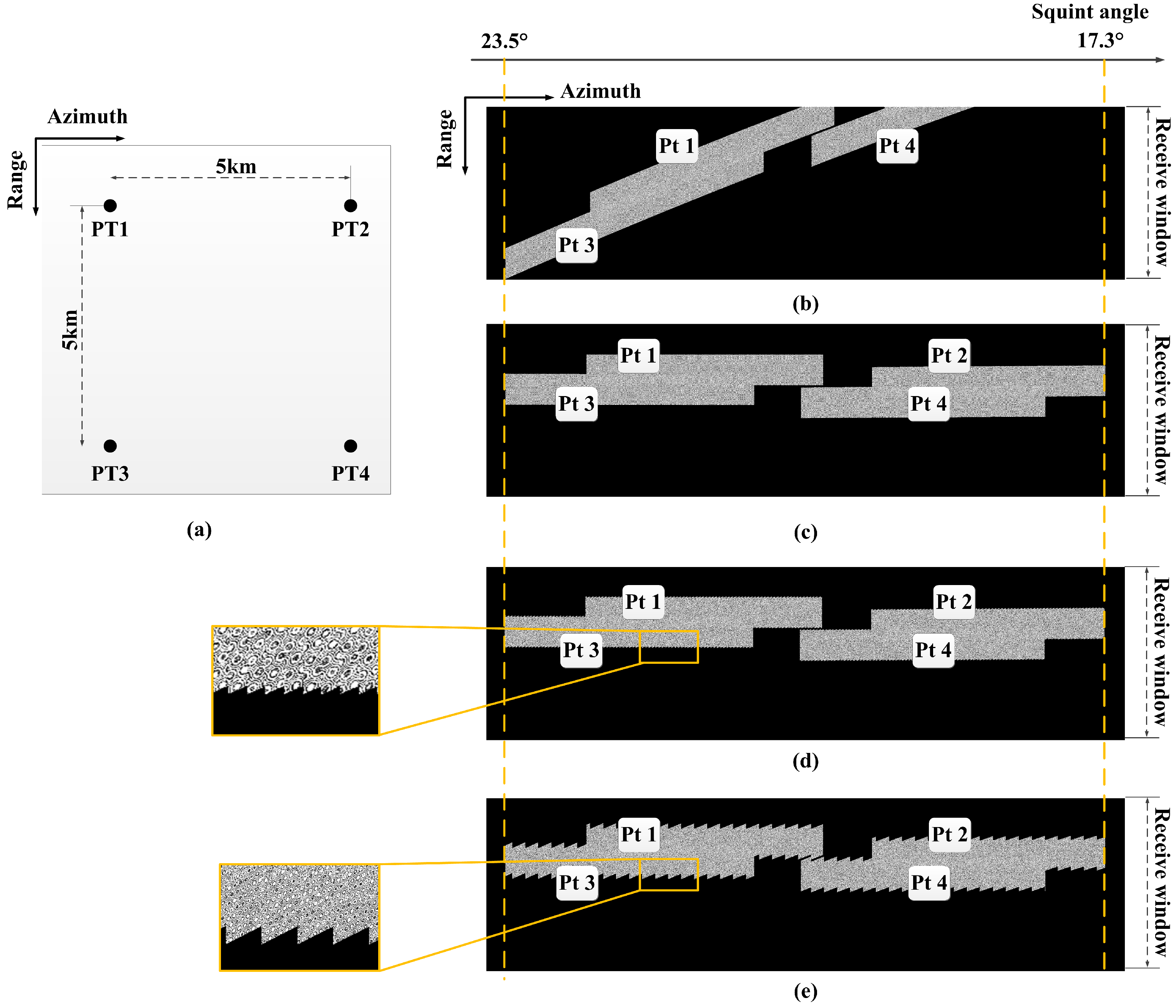
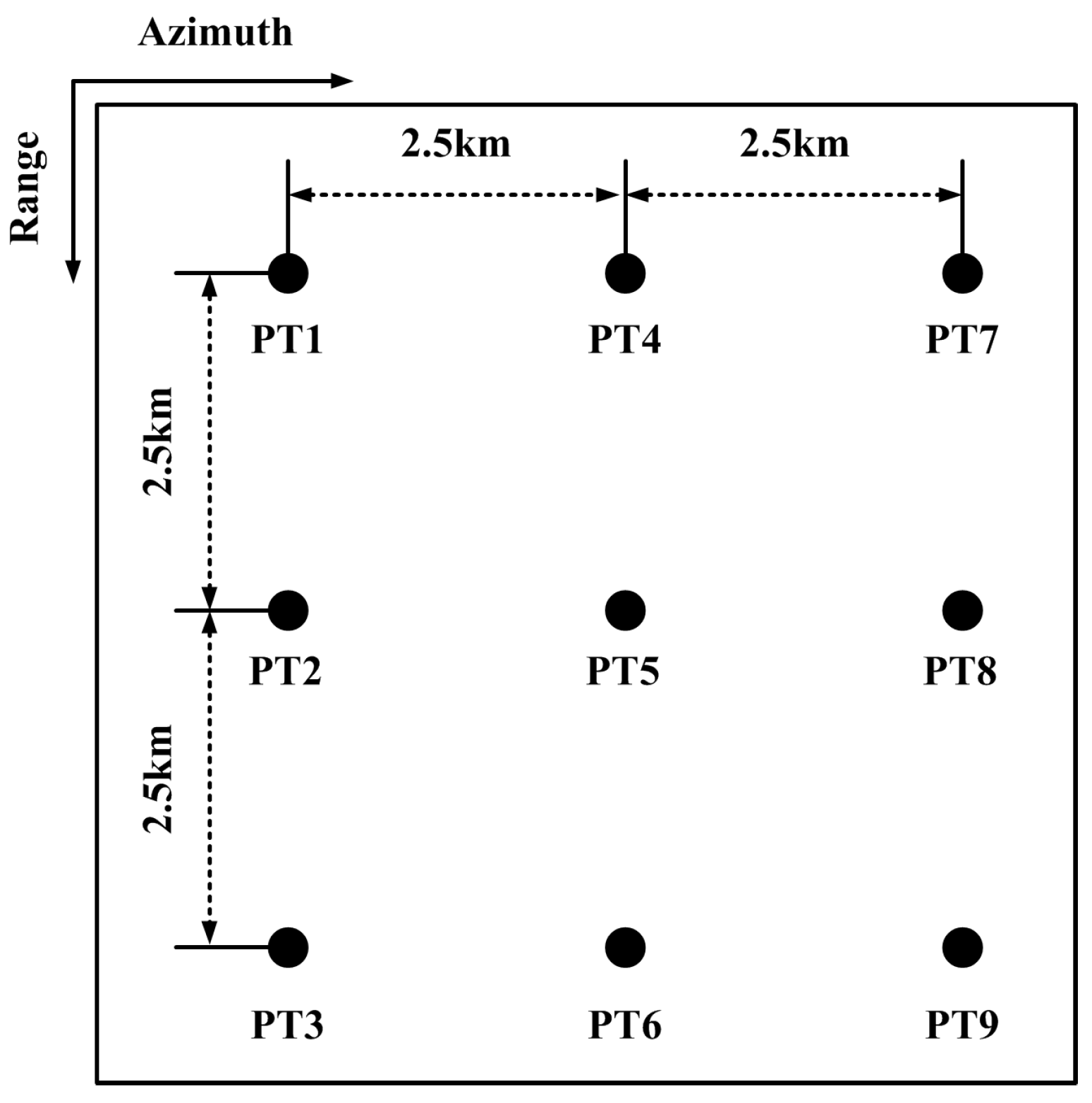
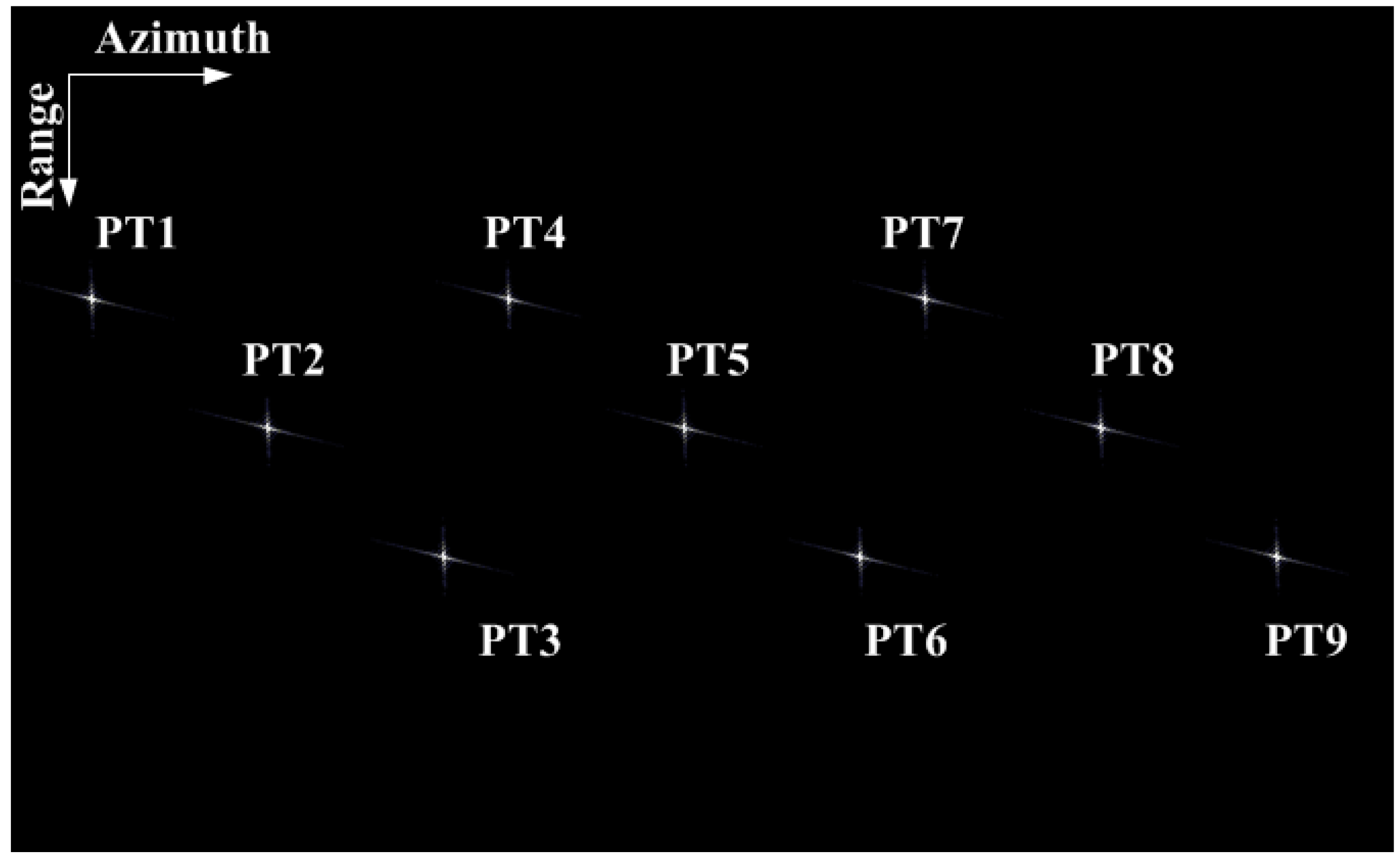
To verify the ability to acquire high-resolution and wide-swath SAR images, we study a simulation of the uniform PRF system and the CVPRF system. The simulation scene is shown in
Figure 12a, where the distances of the different targets are 5 km in the azimuth and range direction. The echo data of the uniform PRF system and those of the CVPRF system are shown in
Figure 12b,c. It can be observed that the echo data of the uniform PRF system cannot be acquired, as the range-walk proliferates at high squint angles. In contrast, the CVPRF system not only can record the echo data of a high squint angle but also has the potential to image larger swaths. The simulation results validate the analysis in
Section 2.
Under ideal conditions, the PRFs change continuously. For a compromise and practical strategy, PRFs would change discretely according to the precision of hardware. According to
Figure 11, if the step size of PRF is limited to 1 Hz, the PRFs would vary about every 250 pulses and the echo data is shown in
Figure 12d. In addition, the echo data with the step size of PRF up to 2 Hz is also shown in
Figure 12e.
4. Range Ambiguities
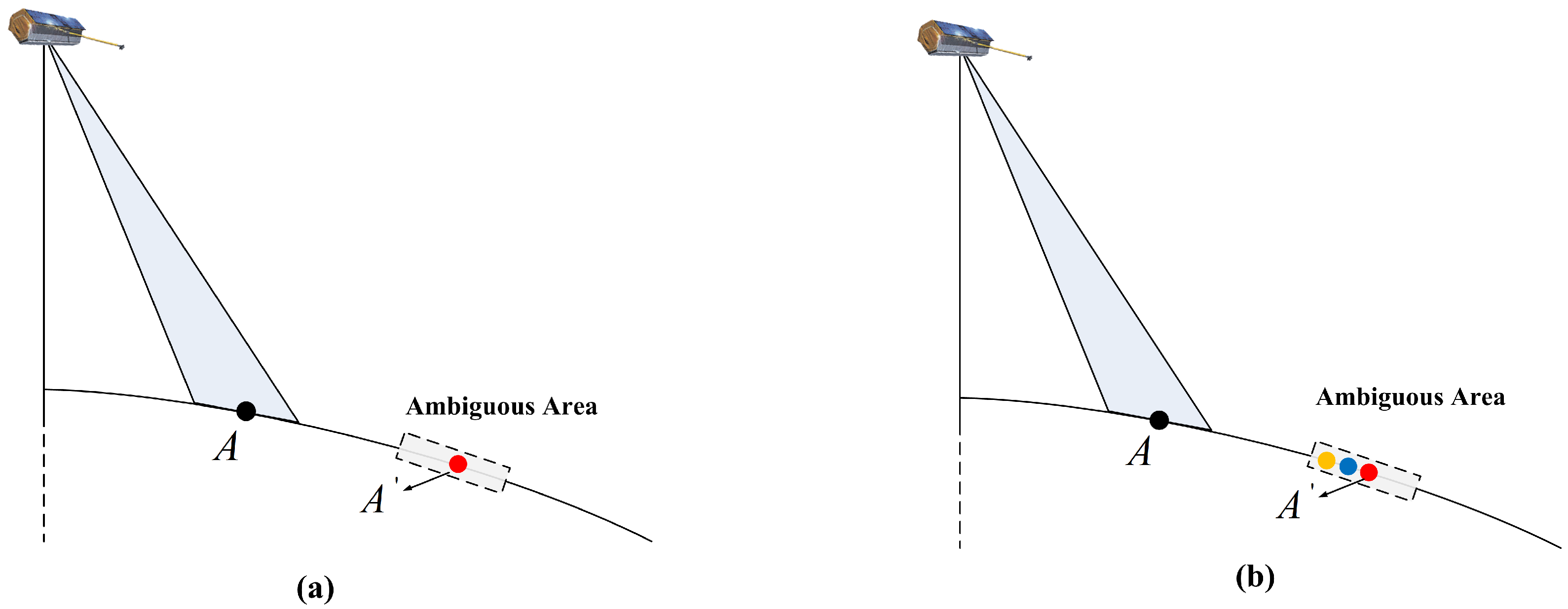
For traditional SAR systems with a uniform PRF, the position of the ambiguous area is fixed during the aperture time, as shown in
Figure 13a. We make an assumption that
is the ambiguous component of point
A, and it is a strong pointlike target. As a result, after azimuth focusing is applied, the ambiguous energy of point
A is focused at the same point, making the ambiguity of point
A much worse than that of other points. In contrast, this situation will be different for SAR systems with changing pulse intervals because the ambiguous components of a strong point-like target are located at different ranges [
17]. As illustrated in
Figure 13b, the ambiguous position of point
A shifts from the red point to the blue point and eventually reaches the yellow point. In general, we assume that the red point
is a strong point-like target, and both the blue and yellow points are normal targets. For point
A, its ambiguous energy exists only in one of the echo pulses instead of in almost all the echo pulses during the aperture time. Moreover, it has to be emphasized that along with the changing PI, the ambiguous energy of the strong point-like target
would spread out to other points, resulting roughly in a uniform distribution of range ambiguity-to-signal ratio (RASR) along the range direction.
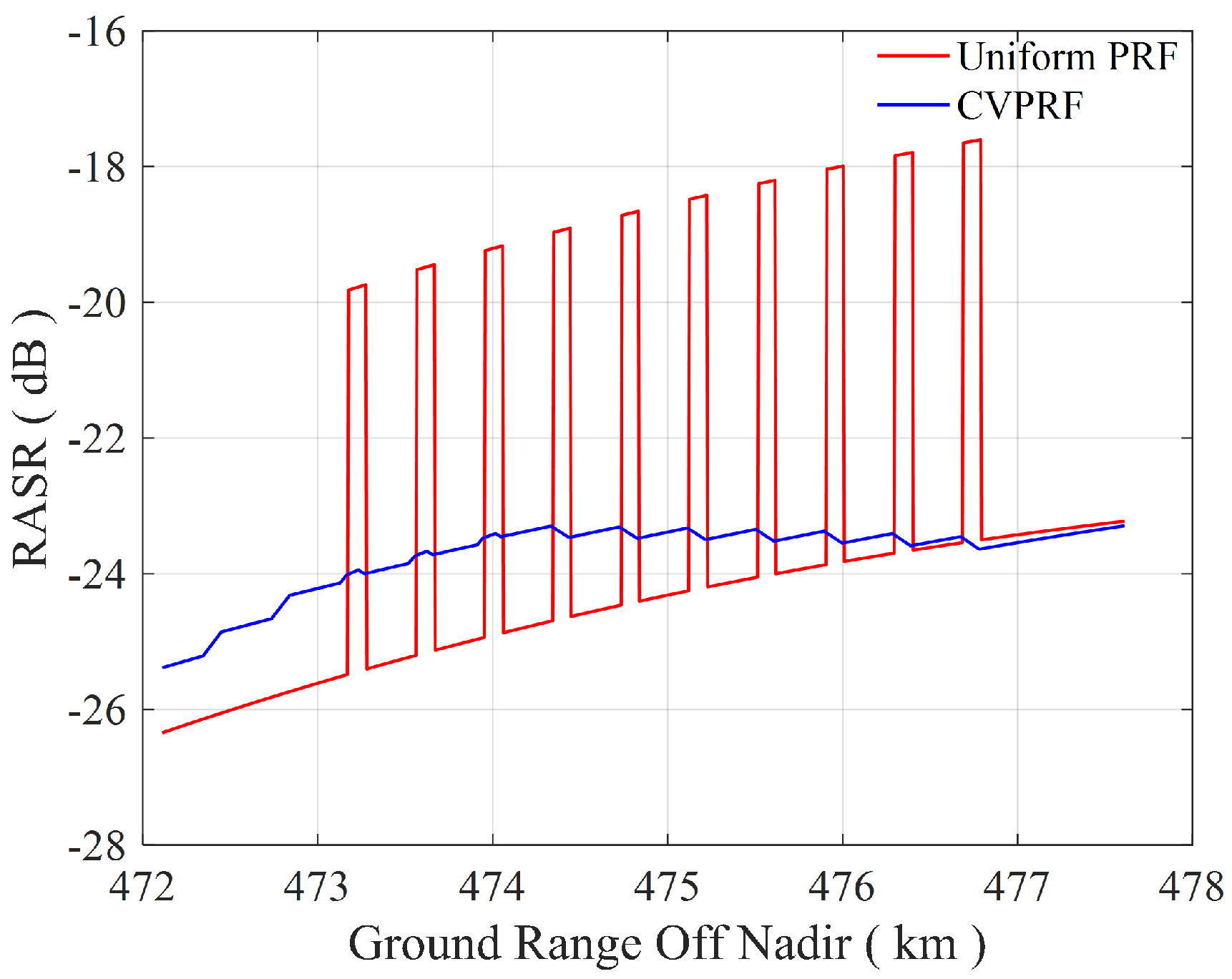
A design example is presented in the following based on the parameters summarized in
Table 2. Ten strong point-like targets are distributed in the ambiguous area. In particular, the uniform PRF is chosen as 3714 Hz, and the varying PRFs are chosen in the interval [3535 Hz, 3714 Hz]. The performance prediction of the RASR is shown in
Figure 14, where the red line and the blue line represent the RASR of the uniform PRF system and that of the CVPRF system, respectively. Due to ten strong point-like targets distributed in the ambiguous area, the RASR of the uniform PRF system (red line) is above −20 dB, which is regarded as a standard value. By dispersing the ambiguous component to different targets, instead of affecting the same point target, the RASR of all targets will keep under −20 dB, with the help of CVPRF technique. Furthermore, the RASR of the ten targets with strong point-like ambiguous component, is reduced by 4∼6 dB.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}