A Novel Dual Separate Paths (DSP) Algorithm Providing Fault-Tolerant Communication for Wireless Sensor Networks


Abstract
:1. Introduction
2. Related Works
2.1. Redundancy-Based Techniques
2.2. Clustering-Based Techniques
3. DSP Algorithm
3.1. Definitions
3.2. DSP Description
- Optimal paths: The dual paths have the best distance possible between the source and destination nodes.
- Separate paths: The dual paths are node-disjoint paths.
- Phase 1: Finding all possible paths between the source and destination nodes.
- Phase 2: Sorting the possible paths in ascending order of path distance.
- Phase 3: Selecting dual separate paths based on the sorted path list.
3.2.1. Phase 1: Finding All Possible Paths
| Algorithm 1 |
{ if () else foreach adjacent node of { } } |
3.2.2. Phase 2: Sorting the Searched Paths
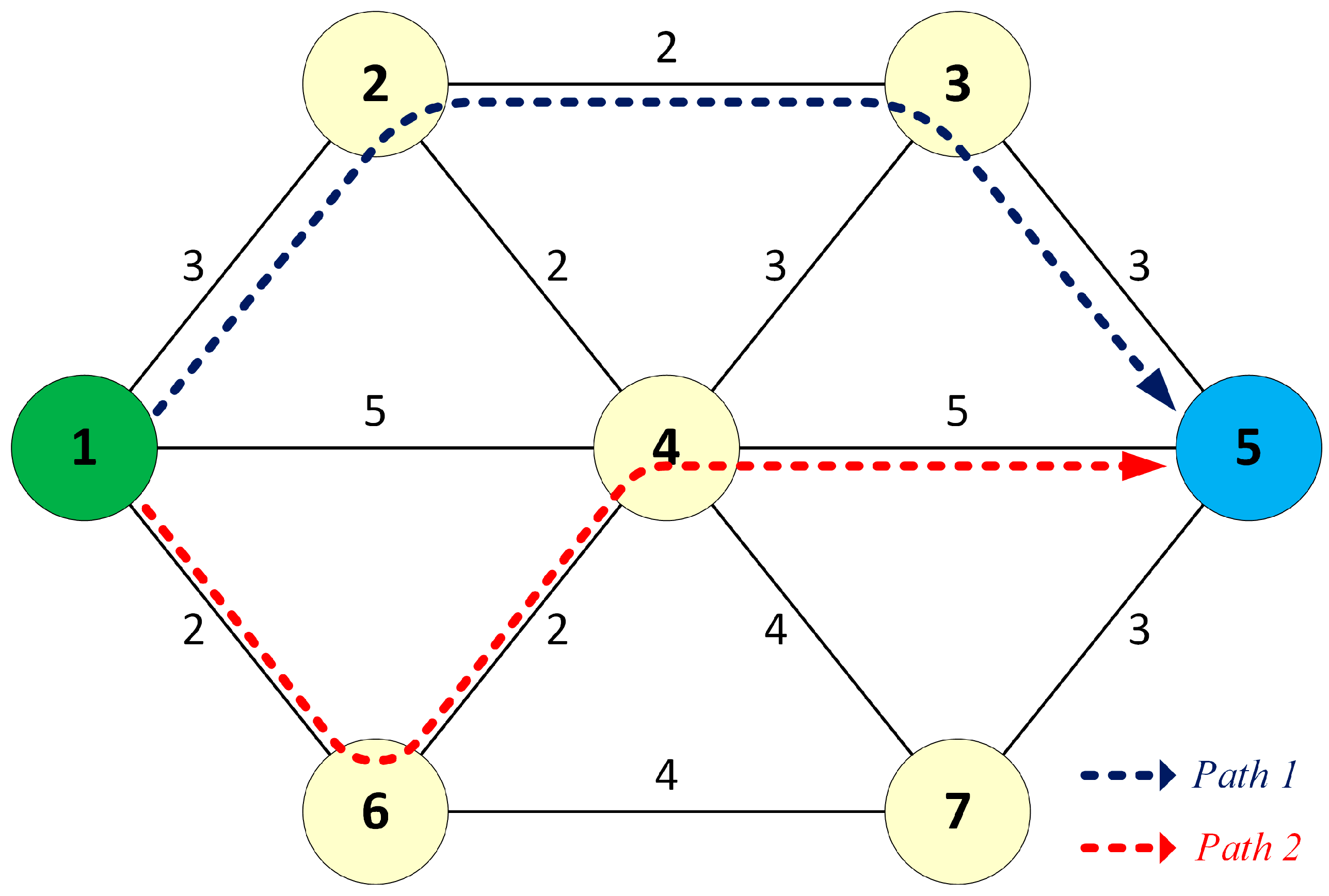
3.2.3. Phase 3: Selecting Dual Separate Paths
| Algorithm 2 |
| { for to { for to { if () return } } } |
3.3. DSP Operations
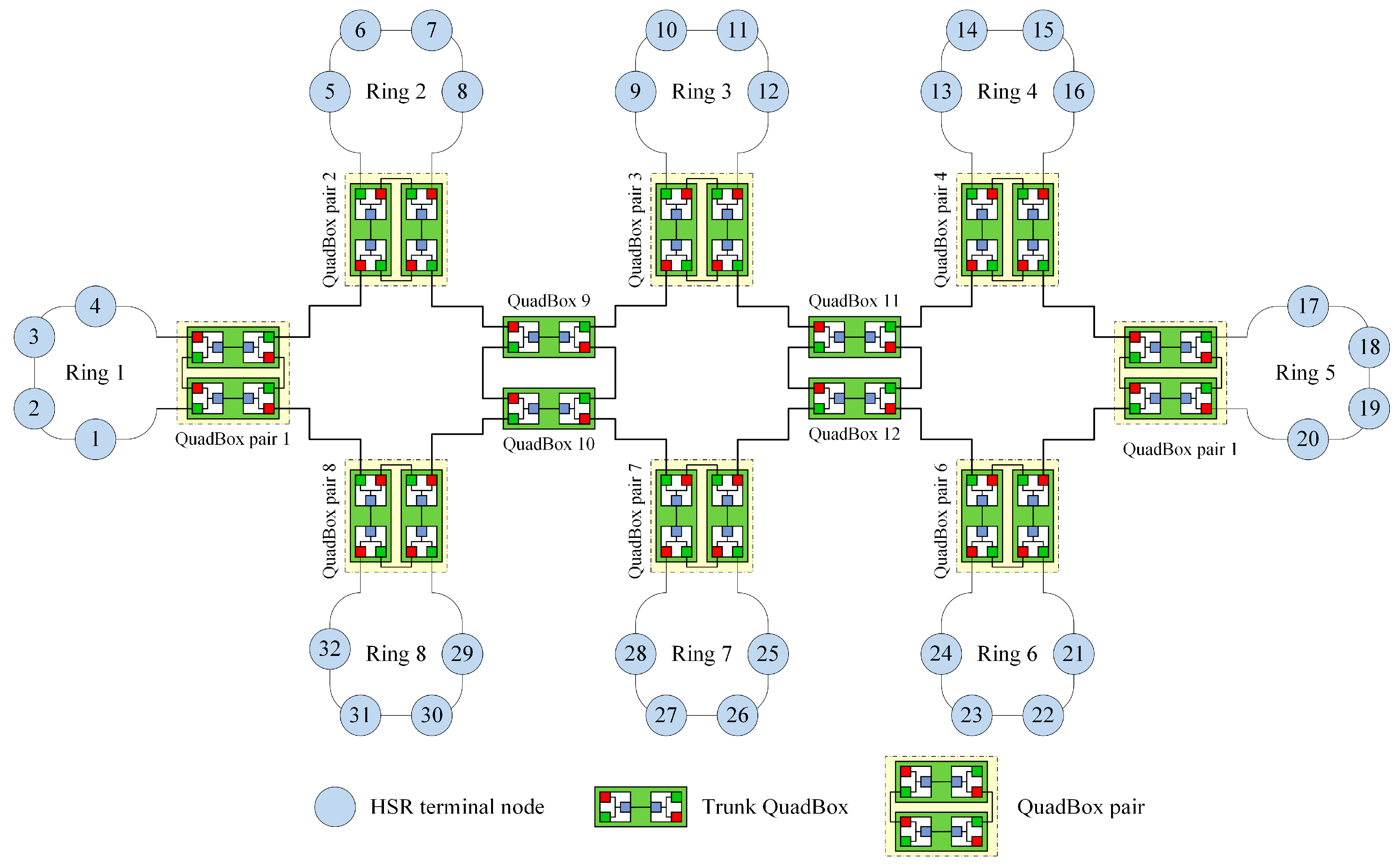
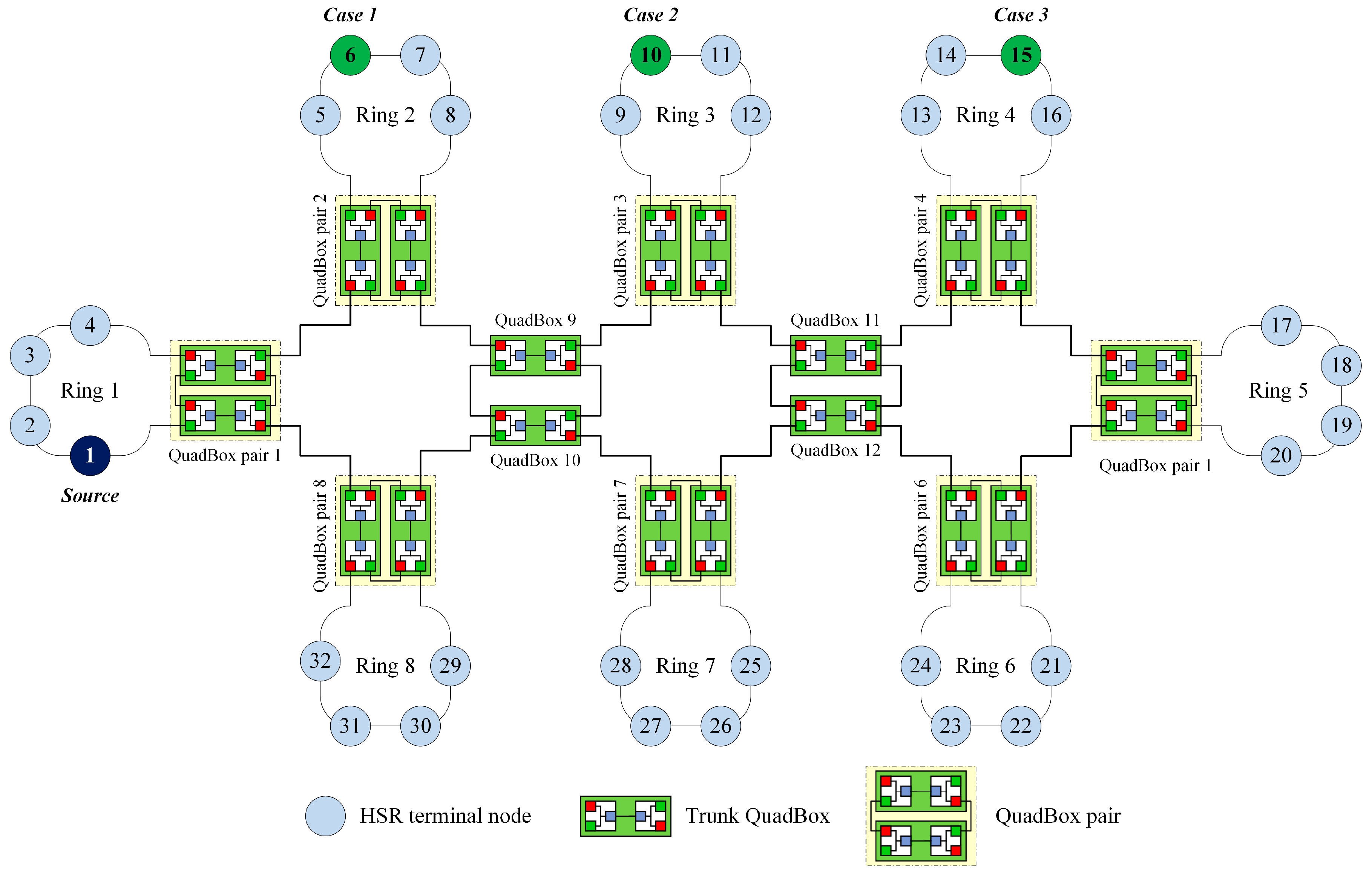
4. Case Study
4.1. Concepts
4.2. Operations
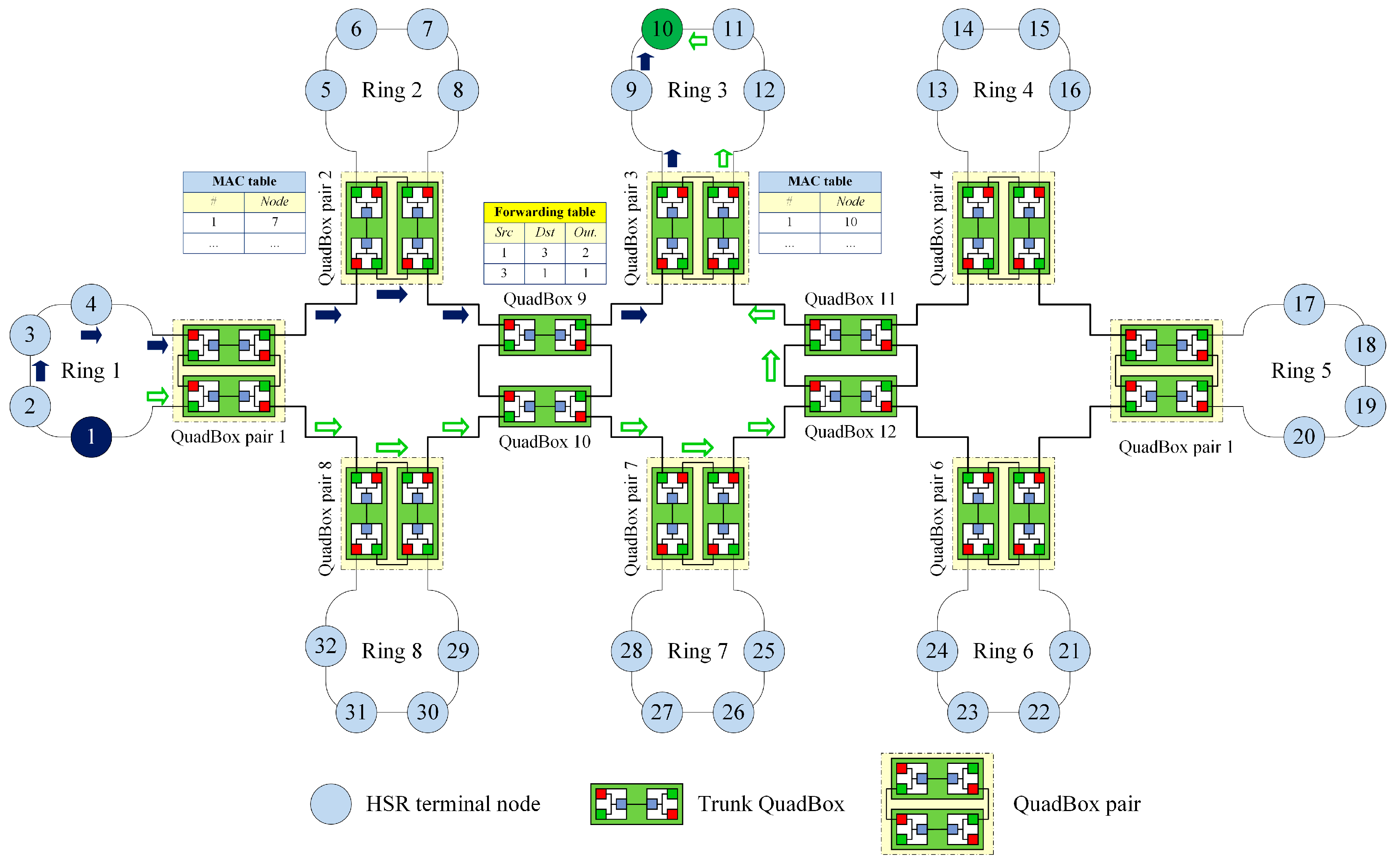
4.2.1. Learning MAC Addresses
Access QuadBox
Trunk QuadBox
4.2.2. Building the Link Table
4.2.3. Finding Dual Paths
4.2.4. Establishing Dual Paths
4.3. Forwarding Principle
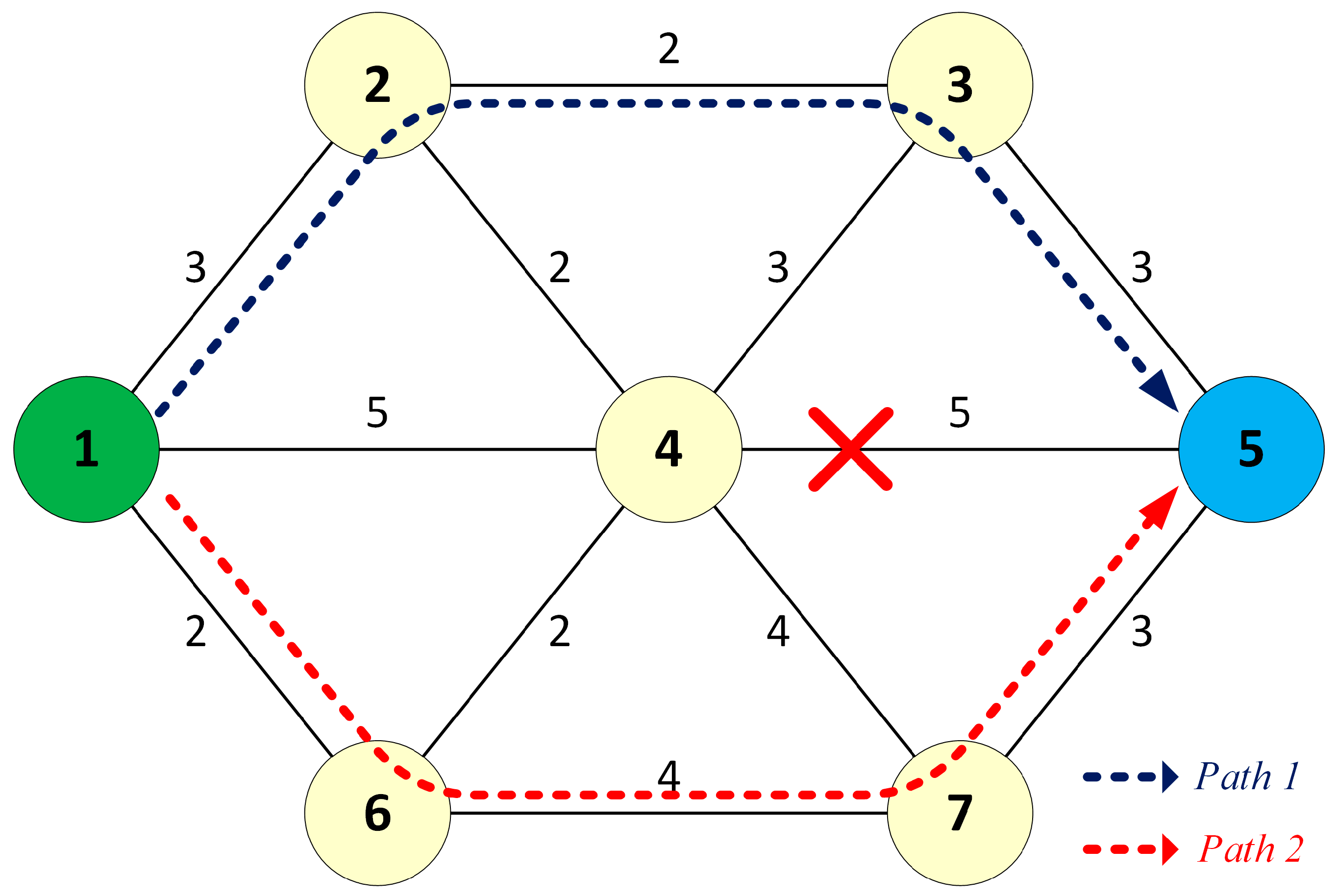
4.4. Monitoring and Fault Recovery
5. Performance Analysis
5.1. Standard HSR Protocol
5.2. DSP-Based Approach
6. Simulations and Discussion
6.1. Simulations
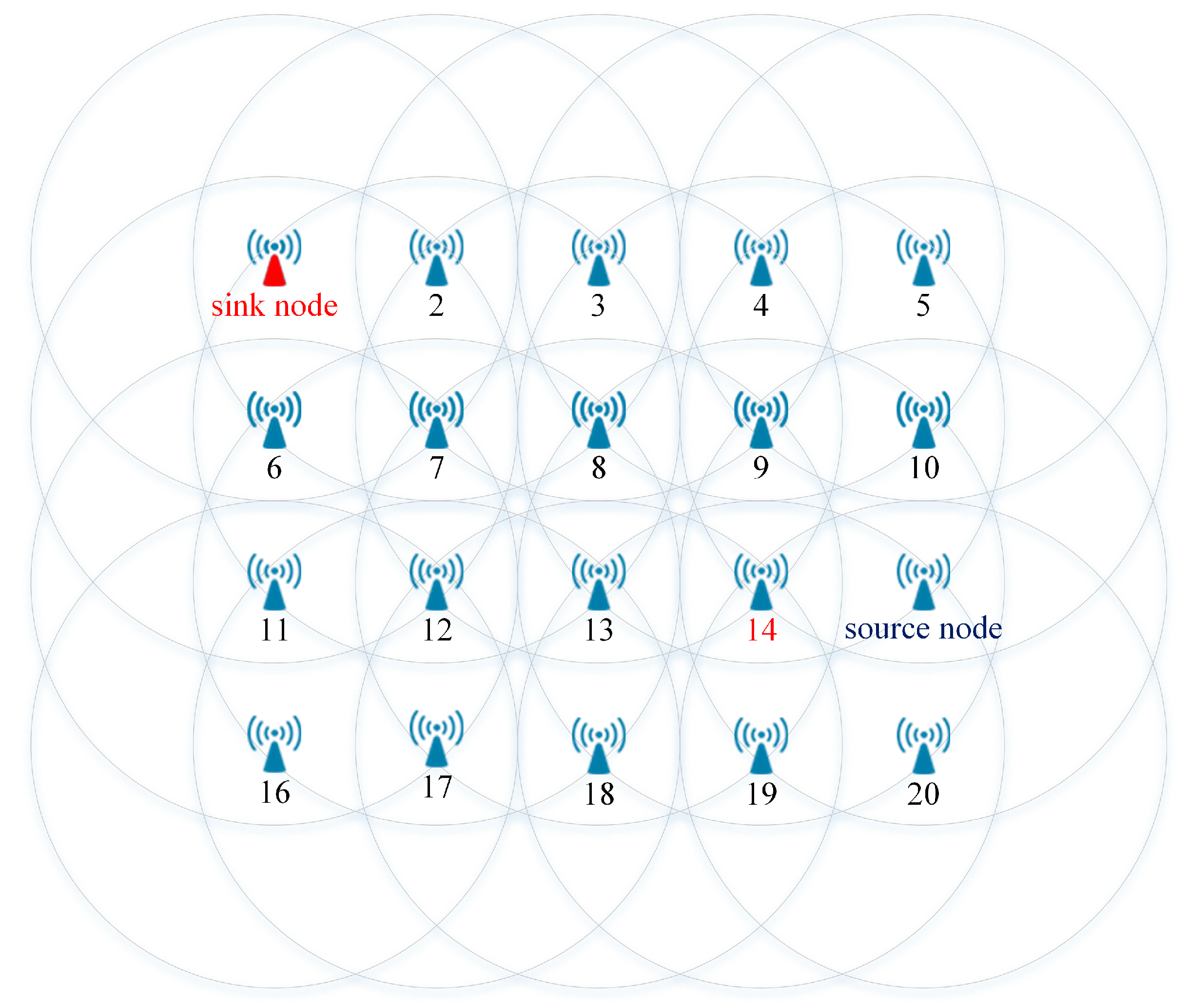
- Simulation 1: Fault-tolerant performance. This simulation was performed to validate and evaluate the fault-tolerant capability provided by the DSP algorithm when it was applied to wireless networks such as WSNs.
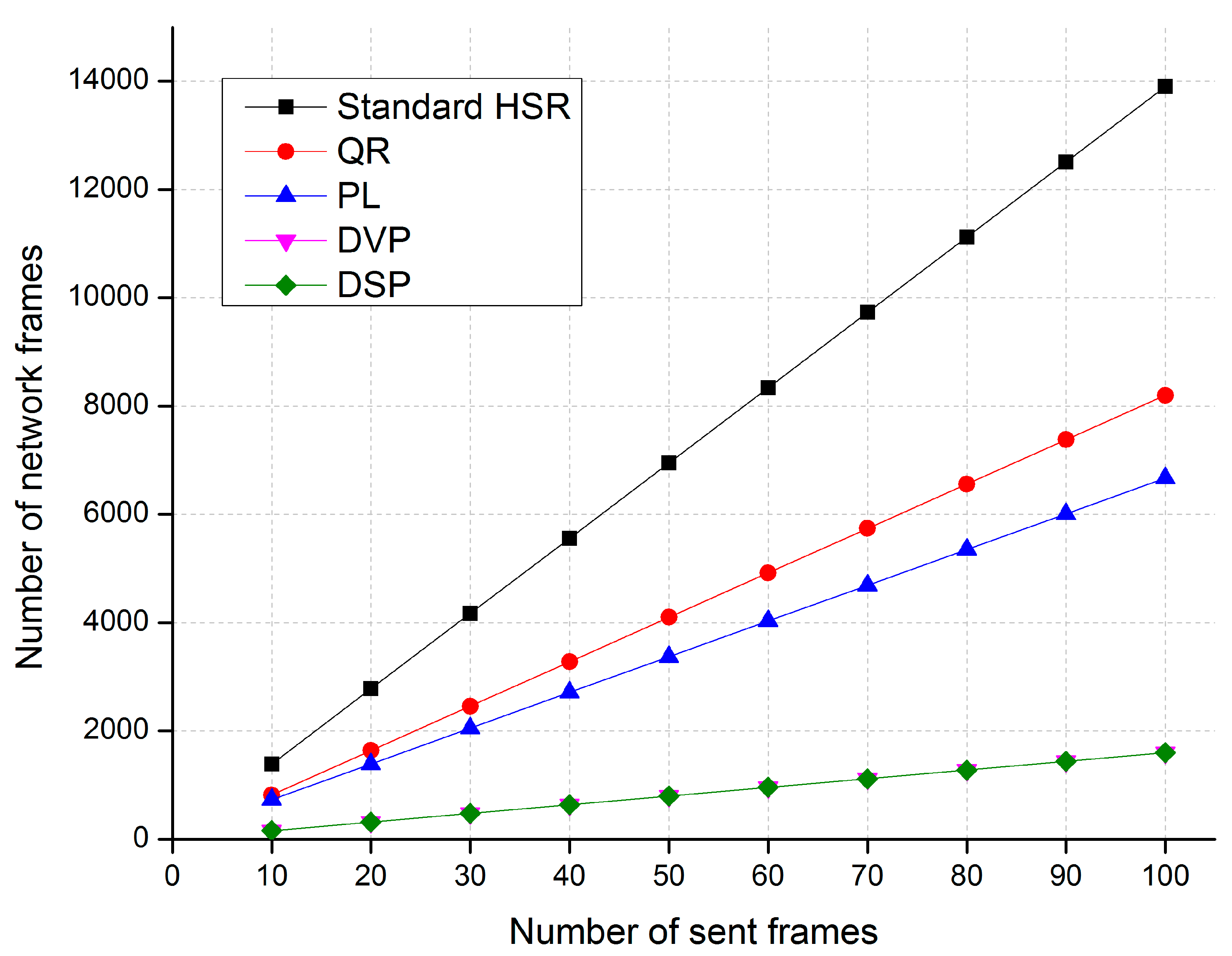
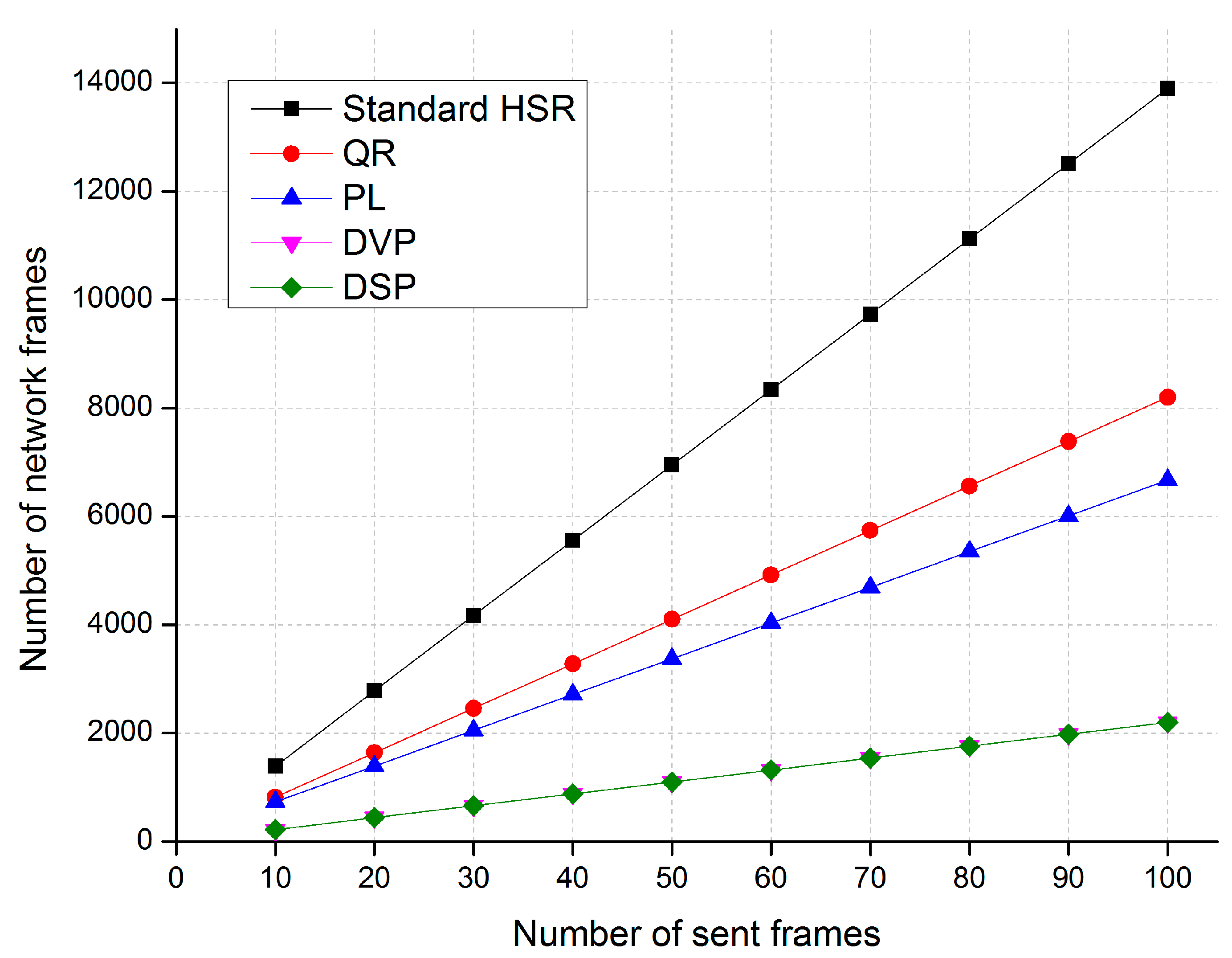
- Simulation 2: Network traffic performance. This simulation was conducted to validate and compare the network traffic performance of the DSP-based approach with the standard HSR protocol and some state-of-the-art techniques when it was applied to HSR networks.
6.1.1. Simulation Description
Simulation 1: Fault-Tolerant Performance
Simulation 2: Network Traffic Performance
6.1.2. Simulation Results
Simulation 1
Simulation 2
6.2. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Carlo, M.C.; Dharma, P.A. Ad Hoc and Sensor Networks—Theory and Applications, 2nd ed.; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2011. [Google Scholar]
- Callaway, E.H. Wireless Sensor Networks—Architectures and Protocols; Auerbach Publications: Boca Raton, FL, USA, 2004. [Google Scholar]
- Alur, R. Principles of Cyber-Physical Systems; The MIT Press: Philadelphia, PA, USA, 2015. [Google Scholar]
- Rho, S.; Vasilakos, A.V.; Chen, W. Cyber physical systems technologies and applications. Future Gen. Comput. Syst. 2016, 56, 436–437. [Google Scholar] [CrossRef]
- Lee, E.A. The Past, Present and Future of Cyber-Physical Systems: A Focus on Models. Sensors 2015, 15, 4837–4869. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.Y.; Zeadally, S.; Chen, T.S.; Chang, C.Y. Enabling Cyber Physical Systems with Wireless Sensor Networking Technologies. Int. J. Distrib. Sens. Netw. 2012, 2012, 489794. [Google Scholar] [CrossRef]
- Krishna, C.M.; Koren, I. Adaptive Fault-Tolerance for Cyber-Physical Systems. In Proceedings of the 2013 International Conference on Computing, Networking and Communications (ICNC), San Diego, CA, USA, 28–31 January 2013; pp. 310–314. [Google Scholar]
- Alwan, H.; Agarwal, A. A Survey on Fault Tolerant Routing Techniques in Wireless Sensor networks. In Proceedings of the 2009 Third International Conference on Sensor Technologies and Applications, Athens, Greece, 14–19 June 2009; pp. 366–371. [Google Scholar]
- Kakamanshadi, G.; Gupta, S.; Singh, S. A survey on Fault Tolerance Techniques in Wireless Sensor Networks. In Proceedings of the 2015 International Conference on Green Computing and Internet of Things (ICGCIoT), Noida, India, 8–10 October 2015; pp. 168–173. [Google Scholar]
- Deb, B.; Bhatnagar, S.; Nath, B. ReInForM: Reliable Information Forwarding Using Multiple Paths in Sensor Networks. In Proceedings of the 28th Annual IEEE International Conference on Local Computer Networks, Bonn, Germany, 20–24 October 2003. [Google Scholar]
- Stoica, I.; Shenker, S.; Zhang, H. Core-stateless fair queueing: Achieving approximately fair bandwidth allocations in high speed networks. In Proceedings of the ACM SIGCOMM ’98 Conference on Applications, Technologies, Architectuers and Protocols for Computer Communication, Vancouver, BC, Canada, 31 August–4 September 1998; pp. 118–130. [Google Scholar]
- Felemban, E.; Lee, C.; Ekici, E. MMSPEED: Multipath Multi-SPEED Protocol for QoS Guarantee of Reliability and Timeliness in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2006, 5, 738–754. [Google Scholar] [CrossRef]
- Liang, Q. Fault-Tolerant and Energy Efficient Wireless Sensor Networks: A Cross-Layer Approach. In Proceedings of the IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–21 October 2005; pp. 1862–1868. [Google Scholar]
- Korbi, I.; Doudane, Y.G.; Jazi, R.; Saidane, L.A. Coverage-Connectivity based Fault Tolerance Procedure in Wireless Sensor Networks. In Proceedings of the 9th International Wireless Communication and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 1540–1545. [Google Scholar]
- Lee, M.; Choi, Y. Fault detection of wireless sensor networks. J. Comput. Commun. 2008, 31, 3469–3475. [Google Scholar] [CrossRef]
- Halder, S.; Mazumdar, M.; Chanak, P.; Banerjee, I. FTLBS: Fault Tolerant Load Balancing Scheme in Wireless Sensor Network. Adv. Comput. Inf. Technol. 2012, 176, 621–631. [Google Scholar]
- Alippi, C.; Ntalampiras, S.; Roveri, M. Model-Free Fault Detection and Isolation in Large-Scale Cyber-Physical Systems. IEEE Trans. Emerg. Top. Comput. Intell. 2017, 1, 61–71. [Google Scholar] [CrossRef]
- Bansal, N.; Sharma, T.P.; Misra, M.; Joshi, R.C. FTEP: A Fault Tolerant Election Protocol for Multi-level Clustering in Homogeneous Wireless Sensor Networks. In Proceedings of the 16th IEEE International Conference on Networks, New Delhi, India, 12–14 December 2008. [Google Scholar]
- Kaur, A.; Sharma, T. FTTCP: Fault Tolerant Two-level Clustering protocol for WSN. Int. J. Netw. Secur. 2010, 1, 28–33. [Google Scholar]
- Karim, L.; Nasser, N.; Sheltami, T. A Fault Tolerant Dynamic Clustering Protocol of Wireless Sensor Networks. In Proceedings of the Global Telecommunications Conference 2009 (GLOBECOM 2009), Hianolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar]
- Bajaber, F.; Awan, I. Dynamic/Static Clustering Protocol for Wireless Sensor Network. In Proceedings of the Second UKSIM European Symposium on Computer Modeling and Simulation (EMS ’08), Liverpool, UK, 8–10 September 2008; pp. 524–529. [Google Scholar]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; The MIT Press: London, UK, 2009; pp. 170–190. [Google Scholar]
- International Electrotechnical Commission. IEC 62439–3 Standard. Industrial Communications Networks: High-Availability Automation Networks, Part 3: Parallel Redundancy Protocol (PRP) and High-Availability Seamless Redundancy (HSR); IEC: Geneva, Switzerland, 2012. [Google Scholar]
- Kirrmann, H.; Weber, K.; Kleineberg, O.; Weibel, H. HSR: Zero recovery time and low-cost redundancy for Industrial Ethernet (High availability seamless redundancy, IEC 62439-3). In Proceedings of the 2009 IEEE Conference on Emerging Technologies & Factory Automation (ETFA2009), Mallorca, Spain, 22–25 September 2009; pp. 1–4. [Google Scholar]
- Kirrmann, H.; Kleineberg, O. Seamless and low-cost redundancy for Substation Automation Systems (High availability Seamless Redundancy, HSR). In Proceedings of the Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011. [Google Scholar]
- OMNeT++ Discrete Event Simulator Version 4.6. Available online: http://www.omnetpp.org/ (accessed on 15 April 2017).
- Nsaif, S.A.; Rhee, J.M. Improvement of high-availability seamless redundancy HSR traffic performance for smart grid communications. J. Commun. Netw. 2012, 14, 653–661. [Google Scholar] [CrossRef]
- Abdulsalam, I.R.; Rhee, J.M. Improvement of High-Availability Seamless Redundancy (HSR) Unicast Traffic Performance Using Port Locking. In Proceedings of the Fourth World Congress on Software Engineering, Hong Kong, China, 3–4 December 2013. [Google Scholar]
- Nsaif, S.A.; Rhee, J.M. DVP: A Novel High-Availability Seamless Redundancy (HSR) Protocol Traffic-Reduction Algorithm for a Substation Automation System Network. Energies 2014, 7, 1792–1810. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Possible Path List | Sorted Path List | ||
|---|---|---|---|---|
| Path | Distance | Path | Distance | |
| 1 | {1, 2, 3, 4, 5} | 13 | {1, 2, 3, 5} | 8 |
| 2 | {1, 2, 3, 4, 6, 7, 5} | 17 | {1, 6, 4, 5} | 9 |
| 3 | {1, 2, 3, 4, 7, 5} | 15 | {1, 6, 7, 5} | 9 |
| 4 | {1, 2, 3, 5} | 8 | {1, 2, 4, 5} | 10 |
| 5 | {1, 2, 4, 3, 5} | 11 | {1, 4, 5} | 10 |
| 6 | {1, 2, 4, 5} | 10 | {1, 6, 4, 3, 5} | 11 |
| 7 | {1, 2, 4, 6, 7, 5} | 14 | {1, 2, 4, 3, 5} | 11 |
| 8 | {1, 2, 4, 7, 5} | 12 | {1, 4, 3, 5} | 11 |
| 9 | {1, 4, 2, 3, 5} | 12 | {1, 6, 4, 2, 3, 5} | 11 |
| 10 | {1, 4, 3, 5} | 11 | {1, 6, 4, 7, 5} | 11 |
| 11 | {1, 4, 5} | 10 | {1, 2, 4, 7, 5} | 12 |
| 12 | {1, 4, 6, 7, 5} | 14 | {1, 4, 2, 3, 5} | 12 |
| 13 | {1, 4, 7, 5} | 12 | {1, 4, 7, 5} | 12 |
| 14 | {1, 6, 4, 2, 3, 5} | 11 | {1, 2, 3, 4, 5} | 13 |
| 15 | {1, 6, 4, 3, 5} | 10 | {1, 2, 4, 6, 7, 5} | 14 |
| 16 | {1, 6, 4, 5} | 9 | {1, 4, 6, 7, 5} | 14 |
| 17 | {1, 6, 4, 7, 5} | 11 | {1, 2, 3, 4, 7, 5} | 15 |
| 18 | {1, 6, 7, 4, 2, 3, 5} | 17 | {1, 6, 7, 4, 5} | 15 |
| 19 | {1, 6, 7, 4, 3, 5} | 16 | {1, 6, 7, 4, 3, 5} | 16 |
| 20 | {1, 6, 7, 4, 5} | 15 | {1, 2, 3, 4, 6, 7, 5} | 17 |
| 21 | {1, 6, 7, 5} | 9 | {1, 6, 7, 4, 2, 3, 5} | 17 |
| No. | Path | Distance |
|---|---|---|
| 1 | {1, 2, 3, 5} | 8 |
| 2 | {1, 6, 4, 5} | 9 |
| Number of Sent Frames | Number of Received Frames | Number of Lost Frames |
|---|---|---|
| 10 | 10 | 0 |
| 20 | 20 | 0 |
| 30 | 30 | 0 |
| 40 | 40 | 0 |
| 50 | 50 | 0 |
| 60 | 60 | 0 |
| 70 | 70 | 0 |
| 80 | 80 | 0 |
| 90 | 90 | 0 |
| 100 | 100 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tien, N.X.; Kim, S.; Rhee, J.M.; Park, S.Y. A Novel Dual Separate Paths (DSP) Algorithm Providing Fault-Tolerant Communication for Wireless Sensor Networks. Sensors 2017, 17, 1699. https://doi.org/10.3390/s17081699
Tien NX, Kim S, Rhee JM, Park SY. A Novel Dual Separate Paths (DSP) Algorithm Providing Fault-Tolerant Communication for Wireless Sensor Networks. Sensors. 2017; 17(8):1699. https://doi.org/10.3390/s17081699
Chicago/Turabian StyleTien, Nguyen Xuan, Semog Kim, Jong Myung Rhee, and Sang Yoon Park. 2017. "A Novel Dual Separate Paths (DSP) Algorithm Providing Fault-Tolerant Communication for Wireless Sensor Networks" Sensors 17, no. 8: 1699. https://doi.org/10.3390/s17081699
APA StyleTien, N. X., Kim, S., Rhee, J. M., & Park, S. Y. (2017). A Novel Dual Separate Paths (DSP) Algorithm Providing Fault-Tolerant Communication for Wireless Sensor Networks. Sensors, 17(8), 1699. https://doi.org/10.3390/s17081699