1. Introduction
Monitoring programs of aquatic environments play a critical role in various water uses, such as the study of aquatic life, livestock watering, human usage, irrigation, recreation, and so on. Clean water sources are beneficial not only for the aquatic ecosystem and natural habitats, but also for public health. In the past, water quality evaluation has relied primarily on time-consuming and human-intensive field measurements for data collection. Technicians usually test water sources in the field utilizing hand-held devices, or transport water samples to laboratories for further analysis. The monitoring programs of this type have been limited by their inadequate measurements on both temporal and spatial scales.
Recent advances in the technologies of sensing, robotics, and Internet of Things (IoT) have led to significant progress in the applications of environmental telemonitoring. In the field of aquatic monitoring, static stations or buoys with capabilities of automated measuring, data logging and wireless transmission have been widely designed by research institutes [
1,
2] or deployed by environmental departments [
3,
4]. Although online data gathering can be achieved by utilizing these systems, they have been limited by their inadequacy and inflexibility in spatiotemporal quality evaluation. In the past decade, sensor nodes that can carry out mobile sensing have been investigated to facilitate flexibility for gathering information at locations of interest over a large-scale area. Monitoring systems with Mobile Sensor Nodes (MSN), Unmanned Surface Vehicles (USV), or Autonomous Underwater Vehicles (AUV) have been developed and deployed to provide spatiotemporal measurements of water sources such as pools, lakes, reservoirs, rivers, and oceans. The main of research in this area has focused on system design and development [
5,
6,
7,
8], sensor deployment and path planning [
9,
10,
11], environment modeling and field reconstruction [
12,
13,
14,
15], data interpretation and evaluation [
16,
17], and so on.
This paper presents the design and development of a rapidly deployable IoT platform for the telemonitoring of surface water with regard to quality characteristics. The rapid deployment framework has to be fast and easy to deploy and maintain [
18]. It may be deployed in the field only for a relatively short-term, but can achieve high-resolution spatiotemporal sampling. The data collected in this approach can benefit aquatic environmental monitoring in various applications such as the survey of an unknown area for collecting useful knowledge to establish an environmental model, the design of a sensor deployment strategy for long-duration monitoring, an analysis of microaquatic environmental changes, and so on. In the present work, an efficient survey planner and an effective online water quality index are proposed and integrated into the developed platform.
To interpret the quality profile of the study area in terms of multiple water quality parameters, the selection of the data Sampling Locations of Interest (SLoIs) is key for carrying out an automated measuring process across the study area. The distribution of the surveyed SLoIs requires a sampling frame that allows for the generation of a reliable interpretation of attributes of interest in a study area [
19]. The SLoIs are generally distributed evenly over the study area or selected at some target locations that are generated based on prior knowledge of the study environment, i.e., environmental models or data-driven rules. After obtaining the objective sampling locations, paths have to be determined for the mobile sensor nodes to visit them. In the past, approaches of the Travelling Salesman Problem (TSP) have been widely applied for planning the paths to visit the objective sampling locations [
20,
21,
22]. In the present work, the primary goal of the proposed planner is the selection of the SLoIs and the generation of a path to visit them. Specifically, a hexagonal grid-based survey planner is proposed. Given energy and time budgets, an effective and efficient path is generated to visit the SLoIs, which are uniformly distributed over the study area. This path is formed as a ring by a Minimum Spanning Tree (MST)-based path planning approach under the hexagonal tessellation. Then sub-paths extracted from the path ring are assigned to multiple MSNs to satisfy the time interval requirement for measuring at a SLoI.
The quality of water is evaluated based on its physical, chemical and biological parameters. With the objective of providing an overall representation of the water quality based on all measurements, effort has gone into developing Water Quality Indices (WQIs) [
23]. A WQI provides a convenient way to represent the water quality by aggregating the measured data of water quality parameters into a numerical score. Then, the score is classed into a clear quality category for reporting to the technicians, managers, policy-makers, and other users. An Online Water Quality Index (OLWQI) is proposed in this paper to represent a large amount of online data for water quality indexing. It is modified by the index formulation of the state-of-the-art index, the CCME WQI, which has been developed by the Canadian Council of Ministers of Environment (CCME) [
24] for off-line indexing. The CCME WQI has been widely used in water quality monitoring programs by many agencies and institutes throughout the world [
25,
26,
27,
28]. It is generally applied off-line, using data collected at low sampling rates (in the scale of month to quarter). Although the CCME WQI has been used as a possible index for data collected through automated sampling [
29], according to our experiments, disadvantages exist when directly implementing it for online quality indexing. In the present work, the proposed OLWQI provides effective indexing results with a reliable sensitivity factor for large quantities of online data collected through automated sampling. The index formulations of the OLWQI are expressed in analytical form to facilitate the automatic execution on devices.
The proposed survey planner and the OLWQI have been implemented on the developed ICT platform, which consists of a group of mobile sensor nodes, a base station located on shore, and a remote server. Spatiotemporal measurements and the online quality index are provided as the monitoring results, which will be utilized for further decision-making, policy-making, and water management. To demonstrate its performance, the platform has been deployed at the Yosef Wosk Reflecting Pool in the University of British Columbia, Canada. The experimental results and the system performance are presented and discussed in this paper. The rest of the paper is organized as follows. In
Section 2, an overview of the platform is presented.
Section 3 presents the survey planner in the IoT platform. The proposed OLWQI is derived in
Section 4. In
Section 5, the hardware components of the platform are described in detail.
Section 6 presents the system implementation, and demonstrates and discusses the experimental results. The final section concludes the paper.
2. Platform Overview
In the past decade, many IoT platforms have been developed and implemented for aquatic environmental monitoring. Concerning the number of sensing units in a system, the platforms can be categorized into two major types: systems with a single monitoring station (e.g., [
3,
7,
8,
10,
11,
13]) and systems with multiple sensor nodes in a monitoring network (e.g., [
1,
4,
5,
6,
14,
16]). A single monitoring station commonly has sufficient computation and communication resources, and a power supply. The main shortcoming of deploying a single station is its lack of ability to provide high-resolution spatiotemporal monitoring over a large geographical area. A monitoring network with multiple sensor nodes, in contrast, facilitates the monitoring process on both spatial and temporal scales. Concerning the mobility of the sensing unit in a system, the platforms can be classified into static systems (e.g., [
1,
3,
4,
5,
6]) and mobile systems (e.g., [
5,
6,
7,
8,
10,
11,
13,
14]). The static platforms have sensing units deployed at predetermined locations, and provide continuous online measurements in the field. These platforms have proven to be effective in supporting the environmental monitoring in a timely manner due to their abilities regarding data requisition, information processes and wireless transmission [
2]. However, they have been rather hindered by their inadequacy and inflexibility on spatial-scale sensing for area surveillance. In contrast, the mobile platforms that consist of mobile sensing units are able to operate measuring processes by travelling over a large spatial scale. These platforms provide the capability of information gathering at locations of interest over the study area. However, each mobile sensing unit often has crucial resource constraints, such as storage energy, that limit the range it can explore (spatial point of view) or the number of sampling locations it can measure before the phenomena in the monitored field varies significantly (temporal point of view) [
9].
In this paper, the development of a rapidly deployable and easily maintainable IoT platform is presented. The objective of this platform is to provide effective and efficient quality evaluation of surface water in a high-resolution spatiotemporal manner. Compared to the state-of-the-art systems, the platform introduced in this paper has improved behavioral performance on several aspects. Firstly, the low cost of the components in the platform bring a cost effective solution for automated water quality evaluation. In addition, our platform achieves fast deployment and easy maintenance, which simplifies the initial deployment and follow-up maintenance procedures. Secondly, multiple MSNs facilitate the area surveillance on the spatiotemporal scale compared to the static sensing stations. More importantly, the proposed planning algorithm provides an efficient survey planner by considering the energy and time constraints. Thirdly, online quality indexing is implemented in the platform by integrating online data of multiple parameters to give a comprehensive quality evaluation of a study area.
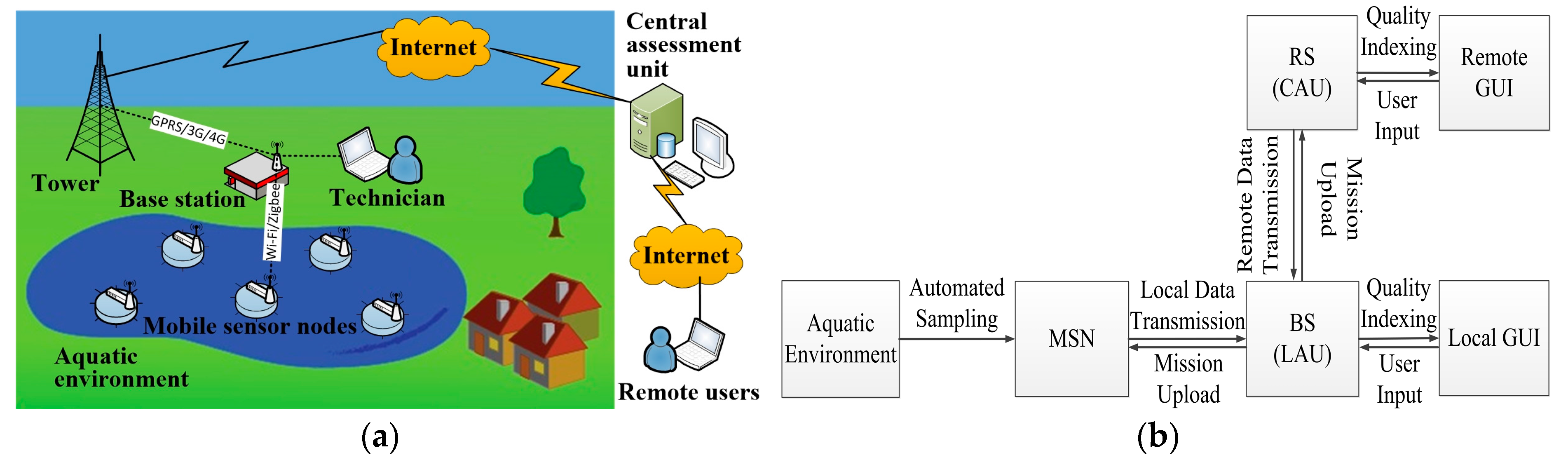
In the implementation, Mobile Sensor Nodes (MSNs) are deployed in a distributed way in the monitored field. The survey missions (sensing locations and moving paths) for the MSNs are generated at a Remote Server (RS) and transmitted to the MSNs via a Base Station (BS). Then, the MSNs follow the received missions to collect data at the scheduled sampling locations. Each MSN consists of a set of heterogeneous sensors to measure different water quality parameters. The collected data is then transmitted to the base station (BS) through a local wireless network (e.g., Wi-Fi or Zigbee). The monitoring results are presented at the BS via a Local Assessment Unit (LAU) in two forms: (1) the measurements in terms of water quality parameters at the sampling locations; and (2) the online water quality index. The former form presents the quantitative measurements in the field. The latter form presents the qualitative evaluation of the surface water. The results are also transmitted to the RS with a Central Assessment Unit (CAU) running on it. Thus, the monitoring results can be accessed locally at the BS by the technicians in the field or accessed remotely by the users via the Internet. The architecture and the workflow diagram of the proposed IoT platform are presented in
Figure 1.
3. Hexagonal Grid-Based Survey Planner
The monitored surface water is generally treated as a continuous planar area. The estimation of the aquatic environmental characteristics is interpreted based on the distribution of the sampling locations across the study area. To characterize the whole study area, especially for an unknown area without any prior knowledge, data samples are generally distributed in a uniform manner. Accordingly, in many applications, a sampling frame is generally designed by decomposing the sensing domain into a grid of cells, to distribute uniform plots across the area of interest.
3.1. Sampling Location of Interest (SLoI)
In the present work, the sampling locations are generated by utilizing a hexagonal cell decomposition approach to distribute the plots evenly across the monitored area . This sampling framework introduces spatially balanced sampling locations where the distances between any neighboring SLoIs are equal. Let the set represent SLoIs to be measured for data collection. All sample locations in are generated using a hexagonal grid-based decomposition of a continuous planar area with its known contour . Let the set represent MSNs that are deployed in a distributed manner in the monitored field. Each MSN consists of a variety of heterogeneous sensors that measure multiple parameters.
First, the study area
is decomposed into a grid of cells by a hexagonal tessellation. The center of each hexagonal cell is chosen as a SLoI
if it is located within the contour
of the study area. An example is shown in
Figure 2a, where the thick red line denotes the contour
, and the blue asterisks denote the SLoIs. Then, the sampling locations are created uniformly across the study area, spaced at
, with
, where
is the distance between two neighboring SLoIs, indicating the sampling resolution of the survey, and
is the edge length of a hexagonal cell. After obtaining the locations for sampling, a path is required to visit these target locations. In this work, a spanning tree-based path planning algorithm is used to travel through the SLoIs in an effective and efficient way.
3.2. Spanning Tree-Based Path Planning
The SLoIs are generated following the sampling frame introduced above. To measure these points, in this work, a spanning tree-based path planning approach is proposed for sensor scheduling and path planning. This approach has been originally implemented on a coverage path planning problem using square cellular decomposition [
30,
31,
32]. In this paper, a novel spanning tree-based survey planner is proposed with hexagonal cellular decomposition. First, a Minimum Spanning Tree (MST) is constructed
, where
and
are the sets of vertices and edges of the tree, respectively. Then, a path to visit all sampling locations is generated based on the obtained MST.
The vertices
for constructing the MST are created based on a set of coarse cells. Each coarse cell contains four regular hexagonal cells. An example with a tessellation of coarse cells is shown in
Figure 2b, where the polygons with thick black edges denote the coarse cells. A vertex is created based on the number and the positions of the SLoIs within a coarse cell. The bottom left, bottom right, top left, and top right regular hexagonal cells (fine cells) within a coarse cell are labeled as fine-cell 1, 2, 3, and 4, respectively. The vertex creation strategies are summarized in
Table 1. For a coarse cell with only one sampling location inside, no vertex is created. After creating the vertices
by traversing all the coarse cells, an MST
is constructed based on these vertices. Prime’s or Kruskal’s algorithm is generally used to span a Minimum Spanning Tree. An example of the constructed MST using Kruskal’s spanning tree algorithm based on the created vertices is shown in
Figure 2b. The green solid circles denote the created MST vertices, and the green lines between the MST vertices are the constructed MST edges.
A path
is then generated to visit sampling locations
based on the constructed spanning tree
, where
denotes a sampling location that is visited on the path.
denotes the total length of the path. A MSN travels through the SLoIs following the sequence order
.
represents the set of visited SLoIs and
denotes the number of the sampling locations in the set. The path starts at a predetermined starting location
, then visits the SLoIs by circumnavigating the constructed MST clockwise or counter-clockwise, and finally returns to the starting location, forming a path ring. Starting from
, the planner iteratively finds the next target location (the next neighboring location to visit) according to the current location and generates a path segment between the current location and the target location until it reaches
again. In each iteration, the fine-cell position of the current location inside its coarse cell is first identified. One of the four possible positions (fine-cell 1, 2, 3, or 4 in its coarse cell, see the asterisks in
Figure 2) can be identified for a given current location. The rules to find the next target location are based on the conditions of its surrounding MST vertices or edges. In
Figure 3, the green solid circles and lines denote the possible MST vertices and tree edges surrounding the central coarse cell with respect to the four possible fine-cell positions. The proposed algorithm for clockwise circumnavigation is given in Algorithm 1 with pseudo code.
| Algorithm 1: clockwiseCircumnavigationPathGeneration |
Input:
Output:
1 ;
2 do
3 ;
4 switch do
5 case 1 do
6 if then ;
7 else if then ;
8 else if then ;
9 else ;
10 case 2 do
11 if then ;
12 else if then ;
13 else if then ;
14 else ;
15 case 3 do
16 if then ;
17 else if then ;
18 else if then ;
19 else ;
20 case 4 do
21 if then ;
22 else if then ;
23 else if then ;
24 else ;
25 ;
26 while ; |
An execution example of the Algorithm 1 is shown in
Figure 1c. A path ring (the thick blue lines between SLoIs) is generated to circumnavigate the MST and visit the SLoIs inside the fine-cells. In this figure, some SLoIs are not visited by the generated circumnavigation path in Algorithm 1. To cover the remaining SLoIs, a simple strategy is proposed. For an unvisited SLoI, if there is a path segment between its two neighboring locations (these two locations are also neighbors), first generate two path segments between the current location and those two locations, and then remove the path segment between those two locations. By applying this strategy, the updated overall path ring is shown in
Figure 1d.
Given a hexagonal cell size , , the total number and locations of the SLoIs are determined according to the sampling frame introduced in subsection A. There is an upper bound for the total length of the generated path : , where represents the number of SLoIs inside the study area with respect to the cell size . Since the energy budget indicates the total length that an MSN can travel, for simplicity, the present paper utilizes the energy budget with a length unit. Accordingly, given the area contour and the energy budget , a feasible cell size can be determined such that . Then the proposed planner will generate a path under the sampling density , satisfying the energy constraint . However, for an arbitrary area contour there is no analytic expression with respect to a cell size . Thus, it is difficult to find the maximum sampling density such that . In an application, cell size can be obtained by iteratively decreasing from an initial value to find a feasible close to its minimum value such that .
At a sampling location
, data collected by an MSN is expressed as
, where
denotes the measurements of the
parameters. It is clear that the data is collected at different locations
along the planned path
one by one in a time series. Let
represent the time consumption when traveling from sampling location
to
. In order to avoid the water current disturbances induced by moving, a MSN stops and stays at a SLoI while carrying out the measurement process. Let
represent the time taken by the measurement process for staying at an SLoI. The period that all SLoIs are visited once by a MSN is called a survey cycle or a sampling cycle. If a single MSN is deployed to follow the generated path ring
periodically, it leads to a time consumption
for each sampling cycle. It means each SLoI is visited at every time interval
. To ensure the sampling rate at each SLoI satisfies a given time interval (time budget)
, if
, the path ring
is divided into
sub-paths, such that
where
is the average speed of a MSN. To find the minimum number of MSNs to be deployed,
is obtained. The path ring
is uniformly divided into
sub-paths
. They are assigned to
MSNs, respectively. The generated path ring
starts and ends at the same location, forming a ring route. Thus, the USVs take different sub-paths by moving along the path ring clockwise or counter-clockwise in different sensing cycles. In this scheme, each SLoI can be visited and sensed within the objective time interval
.
The proposed Hexagonal Grid-based Survey Planner (HGSP) for multiple MSNs is summarized in Algorithm 2 with pseudo code.
| Algorithm 2: hexagonalGridBasedSurveyPlanner |
Input: .
Output: .
1 ;
2 do
3 ; ;
4 ;
5 while (); % Find the objective
6 ;
7 ; % Construct the MST
8 ;
9 ; % Generate the path ring
10 ;
11 if then ; ;
12 else ; % Generate the sub-paths for MSNs |
4. Online Water Quality Index
Most WQIs (including the CCME WQI) focus on off-line evaluations, which utilize data collected at a low sampling rate (typically at monthly or quarterly intervals) and at a limited number of sampling locations. The CCME WQI has been widely used in water quality monitoring programs. The index formulation of the CCME WQI incorporates three statistical factors by comparing the measurements of water quality parameters and their guidelines (a range of acceptable values). The index formulation is based on the following three assessment factors [
33]:
In this section, the original index formulation of the CCME WQI is first expressed in an analytical form. Using that, it may be applied (with possible modification) to automated online data measurement at a relative high sampling rate (at minute or hour intervals). Furthermore, the derivation of the analytical form facilitates its further implementation on the IoT platform for online water quality indexing.
In the data acquisition process of the present work, the data records are measured and logged one by one. Each data record contains the sampling locations, sampling time, and the measurements of multiple water quality parameters. Each measurement is called a data sample or a test. The measurements involved in the indexing are expressed as:
where a row vector represents the measurements of
parameters of a data record, and
represents the number of samples involved in the index calculation. A guideline matrix is defined as
where
and
respectively represent the lower and upper acceptable values of the
parameters, according to their guidelines. For example, pH value, a common water quality parameter, is specified as
= 6.5 and
= 9 for the protection of aquatic life in freshwater, according to the Canadian Environmental Quality Guidelines (CEQG) [
34].
To describe whether a data sample in
has failed compared to its guideline, a Boolean variable
corresponding to a function
,
= 1, …,
,
= 1, …,
, is defined as
According to this formulation, the number of failed parameters is given by
; and the number of failed tests is given by
. Then, the three assessment factors in the CCME WQI can be analytically expressed as follows:
The impact of a failed test,
on the three factors will be different since a failed test causes different score changes in the three factors. In this work, the increment
in a factor score caused by a failed test is defined as the factor sensitivity
. The sensitivities of the three assessment factors are given in
Table 2.
According to the sensitivity expressions in
Table 2, biased factor sensitivity may exist when it is applied to handle large amounts of online measurements (
). On one hand, the Scope Factor may dominate the index score with only a few failed tests. For example, a failed test among the total of
tests produces the change
in the first factor, which is
times larger than the change in the second factor
, for the same cause. On the other hand, the parameter with a wide data range may lead to a score bias in the third factor, according to the expressions of the terms
and
. For example, failed electrical conductivity tests (data ranging from 0 to over
) may easily dominate the Amplitude Factor compared to failed pH value tests (data ranging from 0 to 14) in a large number of data records.
To avoid the score bias in the Scope Factor, the average of all measurements of a parameter,
, is used for comparison with its guideline. Specifically, the Scope Factor is modified as follows:
To avoid the score bias in the Amplitude Factor as caused by the excursion of failed tests, the term is modified according to the following normalization process:
where
and
represent the maximum and minimum values, respectively, that a certain parameter can reach. In the original formulation,
or
. In the modified formulation,
for all parameters. Thus, parameters with different variation ranges will result in an unbiased index score within the modified Amplitude Factor. The modified Amplitude Factor is derived using the modified term
given by (14):
Note that
term in the original formulation (12) is replaced by
in the modified formulation. The aim is to reduce the large weighting of this term, as introduced by a large volume of online measurements. The Frequency Factor remains in its original form, as it represents the frequency of failed tests with a reasonable factor of sensitivity. The sensitivities of the modified factors are given in
Table 3. This modified index is the Online Water Quality Index (OLWQI):
6. Experimental Results and Discussion
The developed rapidly deployable IoT platform has been deployed at the Yosef Wosk Reflecting Pool of The University of British Columbia, Canada. The in situ deployment of the platform is shown in
Figure 6.
A fully charged battery enables an MSN to move continuously around 80 min at the average speed of 0.4 m/s. Thus, the total travel distance of a fully charged MSN is approximately 1920 m. In the experiment, 20% battery capacity, i.e., 4 A∙h, was assigned for each sampling cycle. Thus, the energy budget for a sampling cycle was = 384 m. The time interval was set to 15 min. The time cost for measuring process at each SLoI was set to 10 s. Given the above configurations and the contour of the study area, the proposed Hexagonal Grid-based Survey Planner was operated at the RS to generate the survey missions for MSNs in the field. The remaining initial inputs were set to: = 3 m and = 0.2 m. Then the results were obtained by = 2.4 m, = 4.2 m, = 88, = 88, = 366 m , , where 88 sampling locations were covered by the generated path. Accordingly, two MSNs were required in the field to carry out the survey mission to meet the time interval requirement = 15 min. The theoretical time interval for data collection at each sampling location can be estimated as s .
Note that without generating the final path, the objective cell size
can be obtained by referring to the total number of SLoIs after cellular decomposition (line 1–5 in Algorithm 2), such that the total path length is less than the energy budget
. In order to evaluate the performance of the proposed HGSP algorithm for generating the circumnavigation path (line 6–9 in Algorithm 2), it was operated with respect to different cell sizes in comparison with the TSP approach solved by linear integer programming. The experiments were executed using Matlab R2017a in the PC with a 4.00 GHz Intel Core i7-6700K CPU, 32 GB RAM and the experimental results are given in
Table 4. Due to the limited space, some of the plan views by applying the HGSP and TSP algorithms are shown in
Figure 7.
The solution of the TSP approach leads to the minimum path length for traversing all points of interest, which provides optimal performance on energy and time efficiency. In
Table 4, both the proposed HGSP algorithm and the TSP algorithm guaranteed the optimal path length when all SLoIs were visited. However, the performance on the algorithm time cost was decreased by using the proposed approach. For some cases where unvisited SLoIs existed, the total path length was still optimal for covering all other SLoIs. The low quantity of unvisited SLoIs was because they had only one neighboring SLoI, and hence no path segments could be generated for them (see top left unvisited SLoI in
Figure 7c).
The platform core software was developed in Java and executed on the RS to implement the proposed HGSP algorithm and the OLWQI algorithm. The geometric map of the study area was embedded in the software. The survey mission was generated at the core and then sent to MSNs via the BS. The Robotic Operating System (ROS) was executed on the Raspberry Pi 3 in the MSN to control and navigate the MSN to move to the objective sampling locations that included in the survey mission. The collected data was transmitted to the RS via the BS and stored in the MySQL database. The core software then processed the collected data to calculate the OLWQI. Before the MSNs were deployed in the water body, all sensors in each node were calibrated carefully in the field to assure good data sample quality in the initial stages. In addition, two MSNs were fully charged and launched at the predetermined location. In the field test, the coordinates of the SLoIs were translated from the meter scale to GPS coordinates at the RS, and uploaded as the waypoints to the MSNs via the BS. The two MSNs passed along the target path ring four times, while each sampling location was measured eight times over two hours.
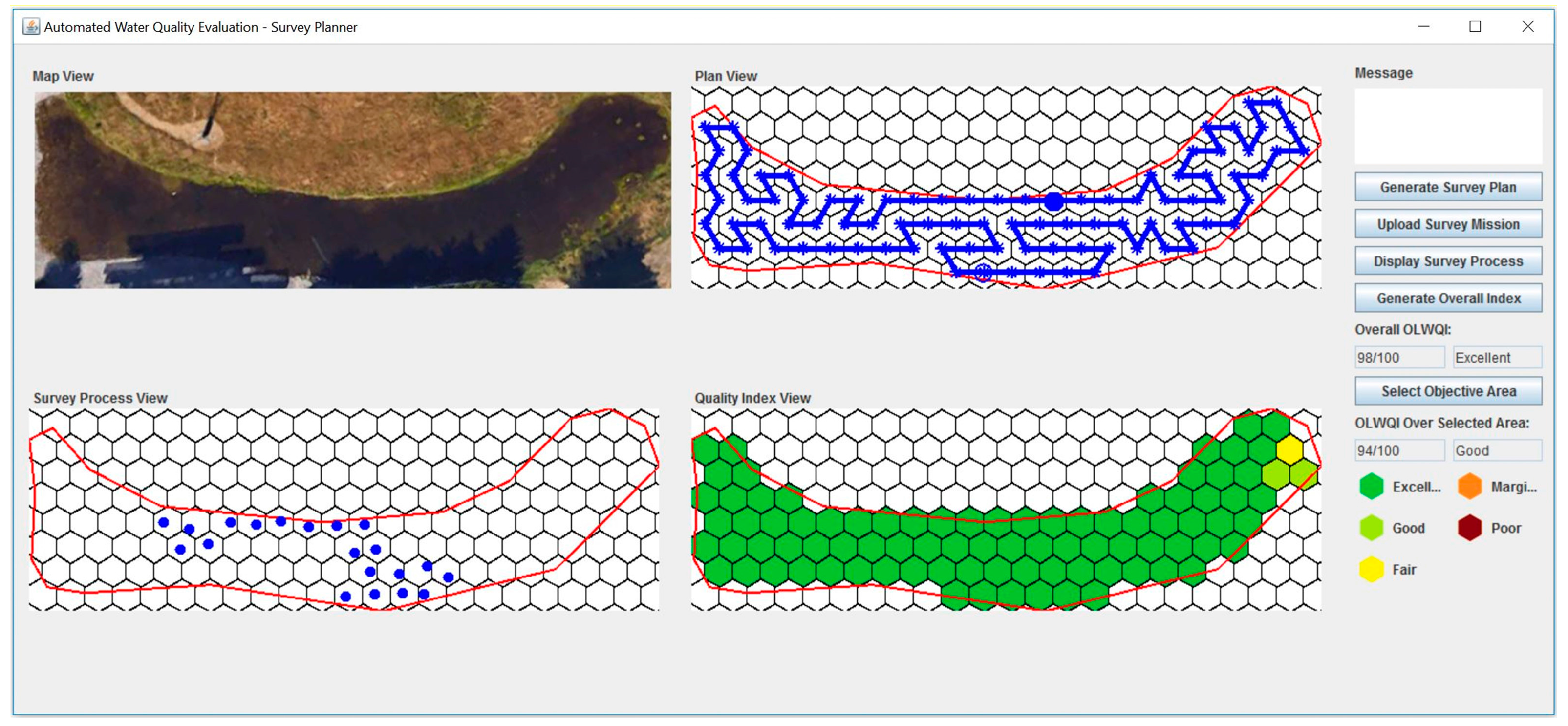
Figure 8 shows a GUI display during the experiment. The path was planned based on the energy budget and the sampling frequency requirement that were set using the “Generate Survey Plan” function in the GUI. The resulting planned path was displayed in the “Plan View”. The blue circles in the plan view denote the division points for the sub-paths, where the hollow one indicates the initial launching position of the MSNs. After successfully uploading the survey mission to the MSNs, the in situ data sampling locations of the MSNs could be checked during the survey process through the “Survey Process View” in the GUI.
The proposed OLWQI is primarily intended for short-term water quality evaluation using data collected through automated sampling. The category interpretation based on the index score referred to Excellent: 95–100; Good: 80–94; Fair: 65–79; Marginal: 45–64; Poor: 0–44 [
33]. The algorithm for calculating the OLWQI was implemented in the LAU and CAU, where the temporal and spatial scales could be set in a flexible manner by user inputs. In the experiments, a one-hour window was used to calculate the OLWQI (four sampling cycles are involved,
) in a temporal point of view. Meanwhile, the quality index of each cell, the overall study area, and a selected objective area were provided and displayed in the GUI (see
Figure 8). The quality indexing results at all the fine hexagonal cells were displayed in the “Quality Index View”, indicated by five different colors referring to the five quality categories. The overall OLWQI were calculated by the integration of the data collected at all the SLoIs over the study area. By utilizing the “Select Objective Area” function in the GUI, the users could check the indexing results across any objective area that was selected in the view.
To demonstrate the performance of the OLWQI in comparison with the CCME WQI, both indices have been implemented in the experiment. In
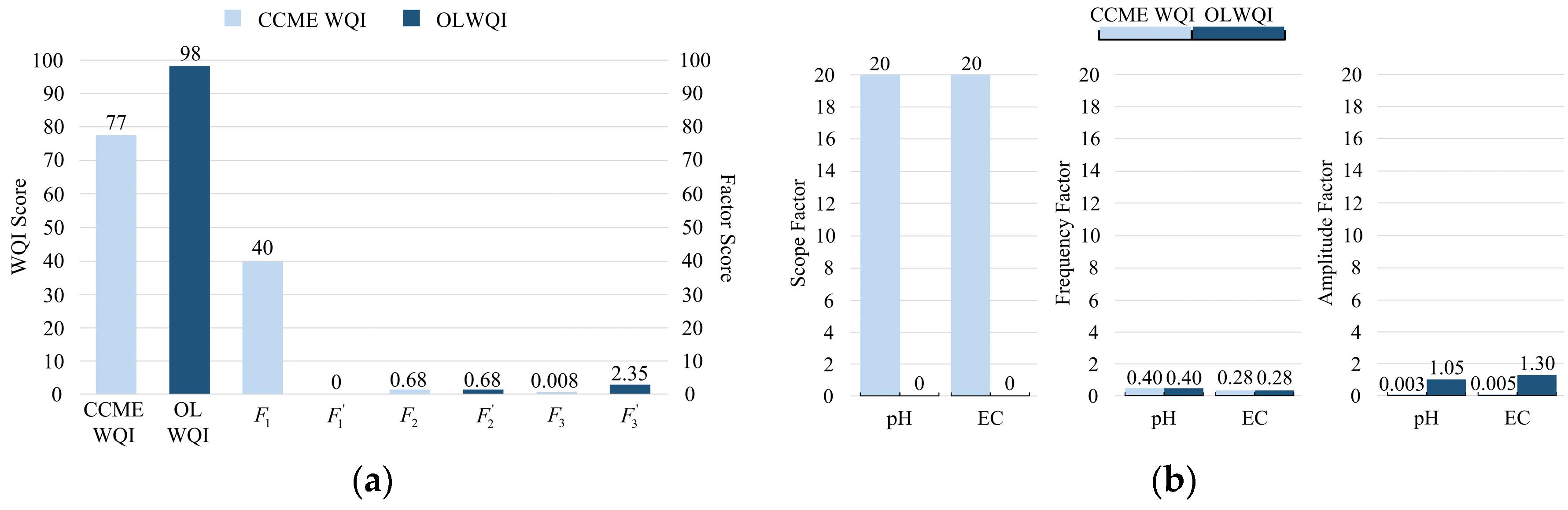
Figure 9, data samples were selected from a one-hour time window to illustrate the indexing results of the overall study area (overall WQI) by using these two indices. In the time window, seven tests of pH value and five tests of EC have failed (readings do not meet their relative guidelines, pH: 6.5–9, EC: <2000 µS/cm) among the total 1760 tests (
× 4 × 5 = 1760). This means 0.68% tests failed in all tests. As shown in
Figure 9a, the overall index score of the CCME WQI was 77/100 (Fair). The Scope Factor dominated the total index score of the CCME WQI. Particularly, in
Figure 9b, the Scope Factor in the CCME WQI was degraded by 40 units due to these few failed tests, leading to the unreliable index score of the CCME WQI. In fact, in the worst-case scenario, only two failed tests from these two parameters (pH value and EC) can cause such a 40-unit degradation. By contrast, the OLWQI indicated an online indexing result of 98/100 (Excellent). The Scope Factor in the OLWQI has not been affected unreasonably by the small number of failed tests.
The influence of the Amplitude Factor can be ignored if the CCME WQI is implemented on a large volume of online sampled data. This issue is demonstrated in
Figure 9. The modification in the OLWQI for the Amplitude Factor makes it effective for a large volume of data. In addition, the water quality parameters with different data ranges result in different excursion ranges for the Amplitude Factor when the CCME WQI is implemented. Notice that the parameter with a large value range (e.g., EC) results in a large excursion range. This may lead to a biased index score. For example, a test of EC = 3200 μS/cm leads to the excursion of 0.6 in the Amplitude Factor of the CCME WQI. It even exceeds the upper limit of the pH excursion, since the maximum pH value is 14 (maximum pH excursion:
). Hence, a parameter may dominate the Amplitude Factor in the CCME WQI. In contrast, the OLWQI provided the same excursion range (from 0 to 1) for different parameters, regardless of their data range and guidelines.
In the above experiment, data samples collected from the field test were used to demonstrate the performance results of the OLWQI compared to the state-of-the-art CCME WQI. For further validation of the performance of online indexing, both indices have been implemented on the realistic dataset with a large volume of continuous online measurements collected by the Chesapeake Bay Interpretive Buoy System (CBIBS) [
4]. The data from 1 June 2017 to 1 July 2017 at 10 monitoring stations in the dataset have been selected for the experiment. The measurements of six parameters that are related to water quality (i.e., Chlorophyll A, Dissolved Oxygen, Turbidity, Conductivity, Salinity, and Temperature) have been involved in the index calculation. The index were calculated hourly by aggregating the latest 24-h data for quality evaluation (24-h sliding time window). Due to the limited space,
Table 5 shows some of the indexing results when implemented the CCME WQI and the proposed OLWQI on the dataset.
To demonstrate the resulting factor effects on the final index score, we have statistically summarized both indices by applying stepwise regression analysis. Two examples have been given in
Table 6 to show the statistical summary of the final index versus the three factors utilizing the one-month data from the single station (First Landing Station), and the data from the regional multiple stations (First Landing Station and York Spit Station). Both examples in the table demonstrated that the Scope Factor in the CCME WQI dominated the whole index by referring to the adjusted R-squared value of step 1. Meanwhile, the Amplitude Factor in the CCME WQI had very limited influence on the final index score by referring to the adjusted R-squared value of step 3. In the experiment, the stepwise regression analysis has been executed 20 times on the selected dataset, including 10 times on the 10 single stations, and 20 times on the pairs of neighboring stations. The statistical results are summarized in
Table 7. In the table,
, where
= the number of times that the factor
was obtained in the first step,
;
= the corresponding adjusted R-squared value in the first step of the factor
;
= the number of the total experimental runs. The experimental results demonstrated that the proposed OLWQI provided the indexing results with a more balanced factor sensitivity for large quantities of online data automatically collected, compared to the CCME WQI.
7. Conclusions
This paper presented a hexagonal grid-based survey planner and an online quality index that were implemented on an IoT platform. The developed platform provided a cost-effective, fast, deployable, and easily maintainable solution for the high-resolution spatiotemporal telemoitoring of surface water. In the developed platform, the proposed survey planner generated a shortest circular path to cover the sampling locations of interest that are uniformly distributed over the study area, under the energy constraints of the mobile sensor nodes. Multiple mobile sensor nodes were positioned uniformly to travel along the planned path such that each objective sampling location could be visited within the time interval requirement. The proposed sensor scheduling and path planning algorithm was designed for the application scenario of automated water quality monitoring. This automation would be calculated according to the limited power supply of each mobile sensor and required sampling frequency, determining the more evenly distributed sampling locations that the mobile sensors can measure to gather more information and explore the unknown field. In addition, an online quality index, the OLWQI, was modified based on the state-of-the-art water quality index, CCME WQI, to evaluate water quality by integrating a large volume of online data acquired through automated sampling. Meanwhile, the OLWQI that was formulated in the analytical form facilitated online processing by automatic execution on the automated devices.
The developed IoT platform has been deployed in a real water source to demonstrate the implementation of the overall system. The experimental results on path planning demonstrated the effective and efficient performance of the proposed survey planer compared to the state-of-the-art TSP algorithm for generating the coverage path. The performance of the OLWQI in compassion to the existing CCME WQI was demonstrated by using the realistic data that was collected through our developed platform and the data from the CBIBS dataset. The experimental results show that the proposed OLWQI provided balanced factor sensitivities and reliable evaluation results for online quality indexing compared to the CCME WQI. The OLWQI, expressed in the analytical form, facilitated online processing by automatic execution on the devices. In future work, the proposed platform will be extended to exploit the information collected from the mobile sensor nodes to modify the objective sampling locations adaptively over time by incorporating environmental model adaptation. The proposed approach in this paper can be utilized as an initial deployment to collect prior knowledge of the potential environmental model.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




