A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors


Abstract
:1. Introduction
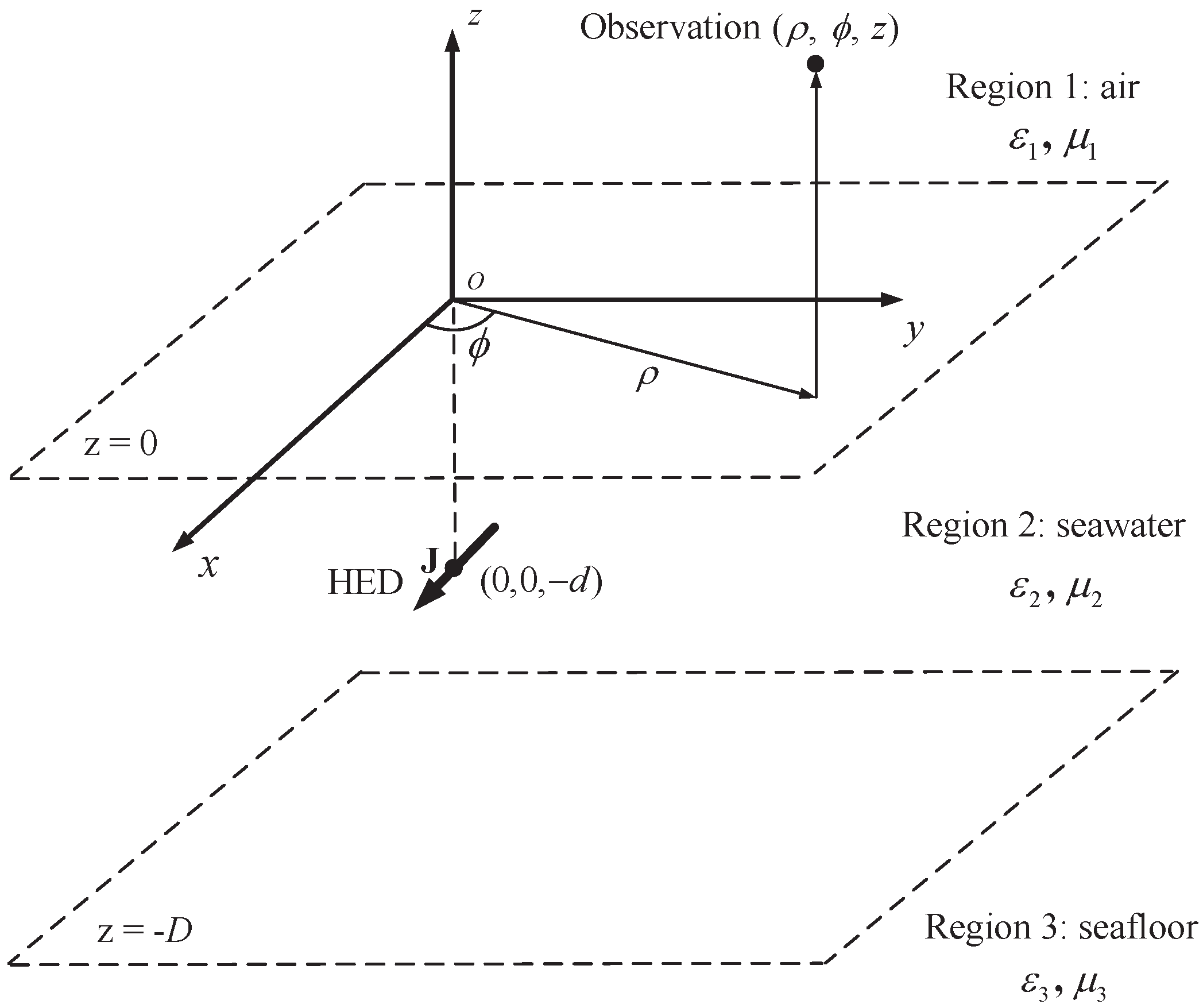
2. Theoretical Modeling and Analysis
3. Calculation and Experiment
3.1. Numerical Integration Technique
3.2. Test Environment Description
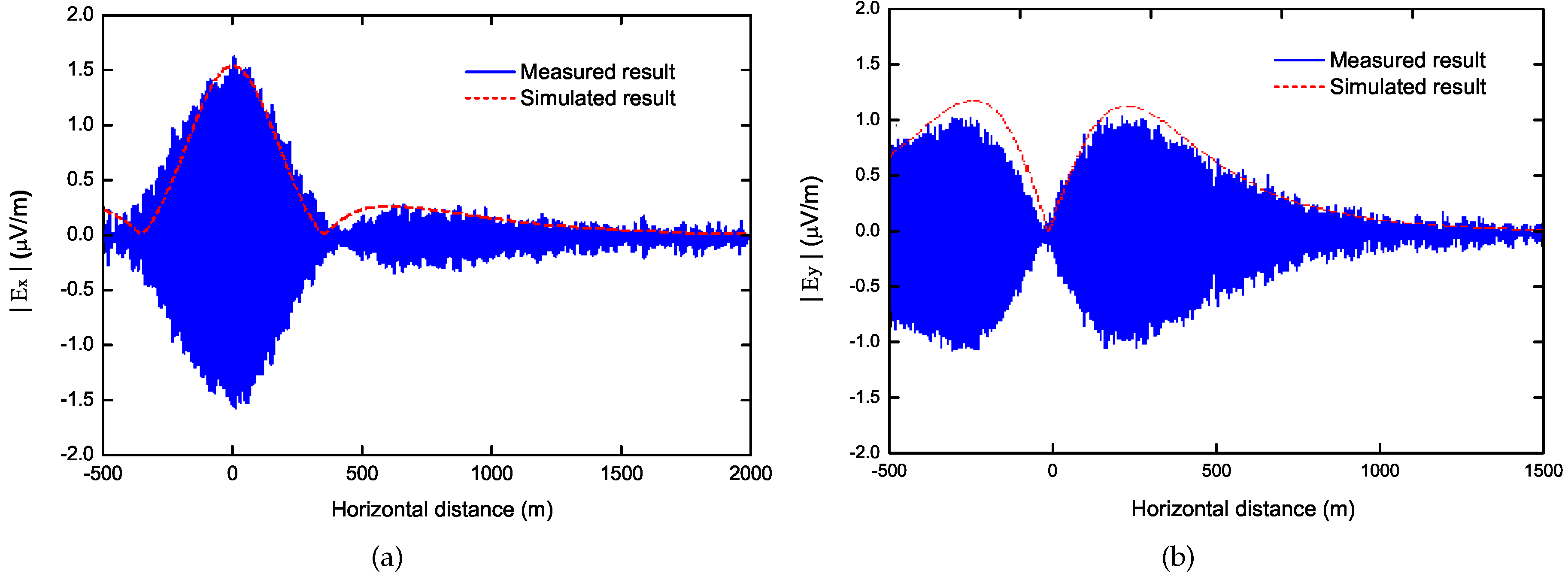
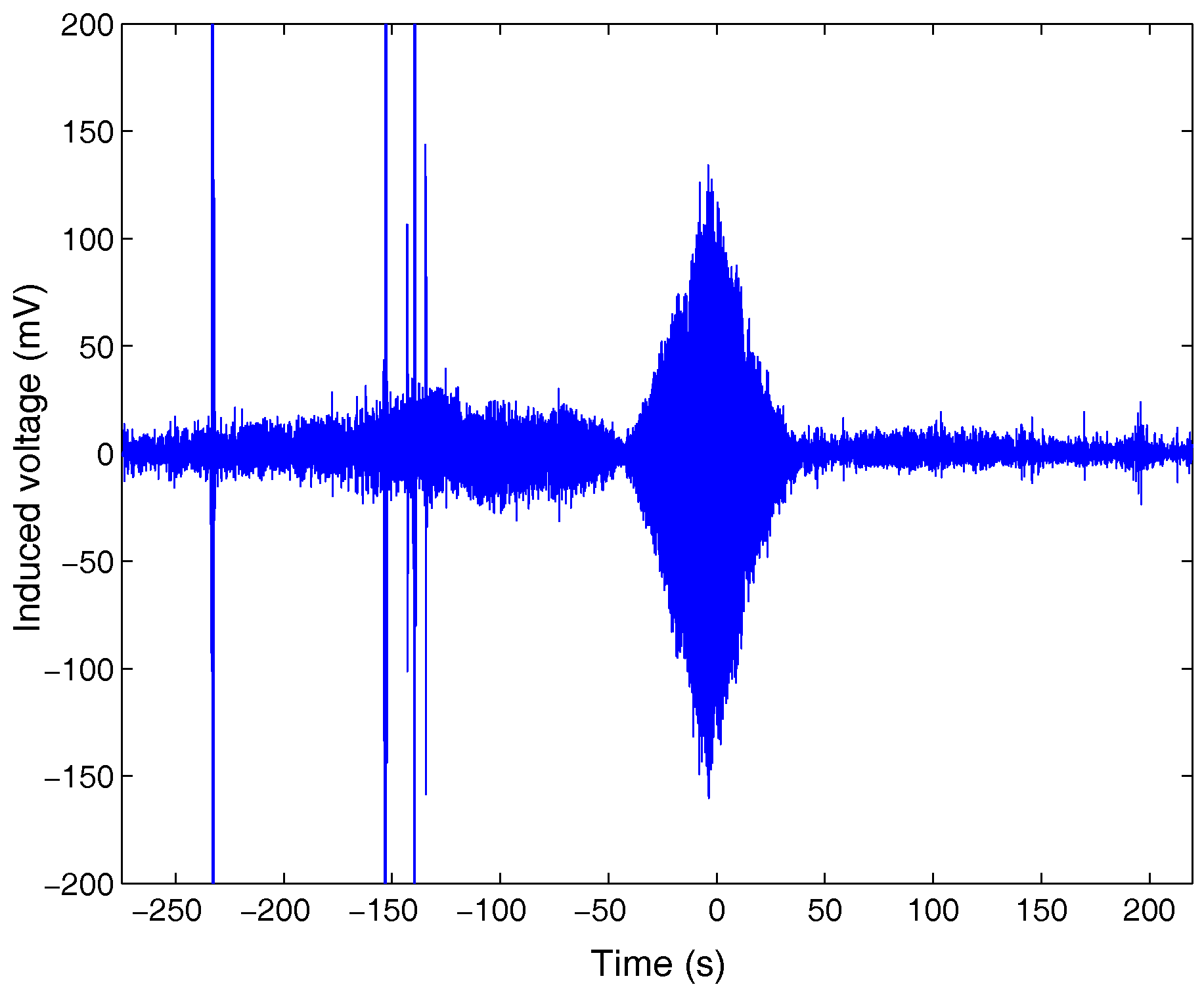
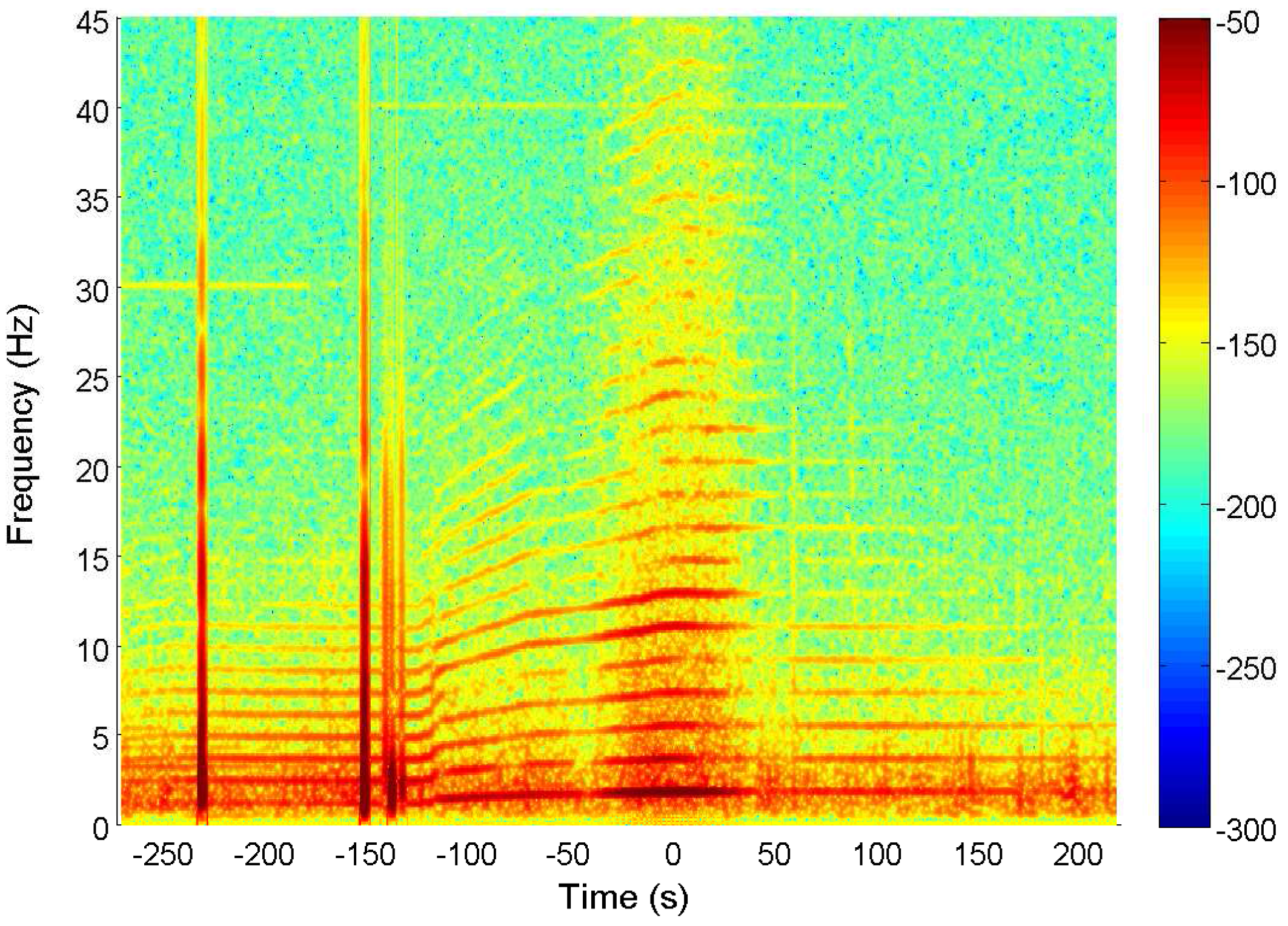
3.3. Experimental Results and Discussions
4. Conclusion
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ELF | extremely low frequency |
| UUV | unmanned underwater vehicle |
| MAD | magnetic anomaly detection |
| HED | horizontal electric dipole |
| TM | transverse magnetic |
| TE | transverse electric |
| SIs | Sommerfeld integrals |
| JFET | junction field-effect transistor |
| FFT | fast Fourier transform |
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Measuring Range | ±10 nT |
| Band Width | 0.5∼20 Hz |
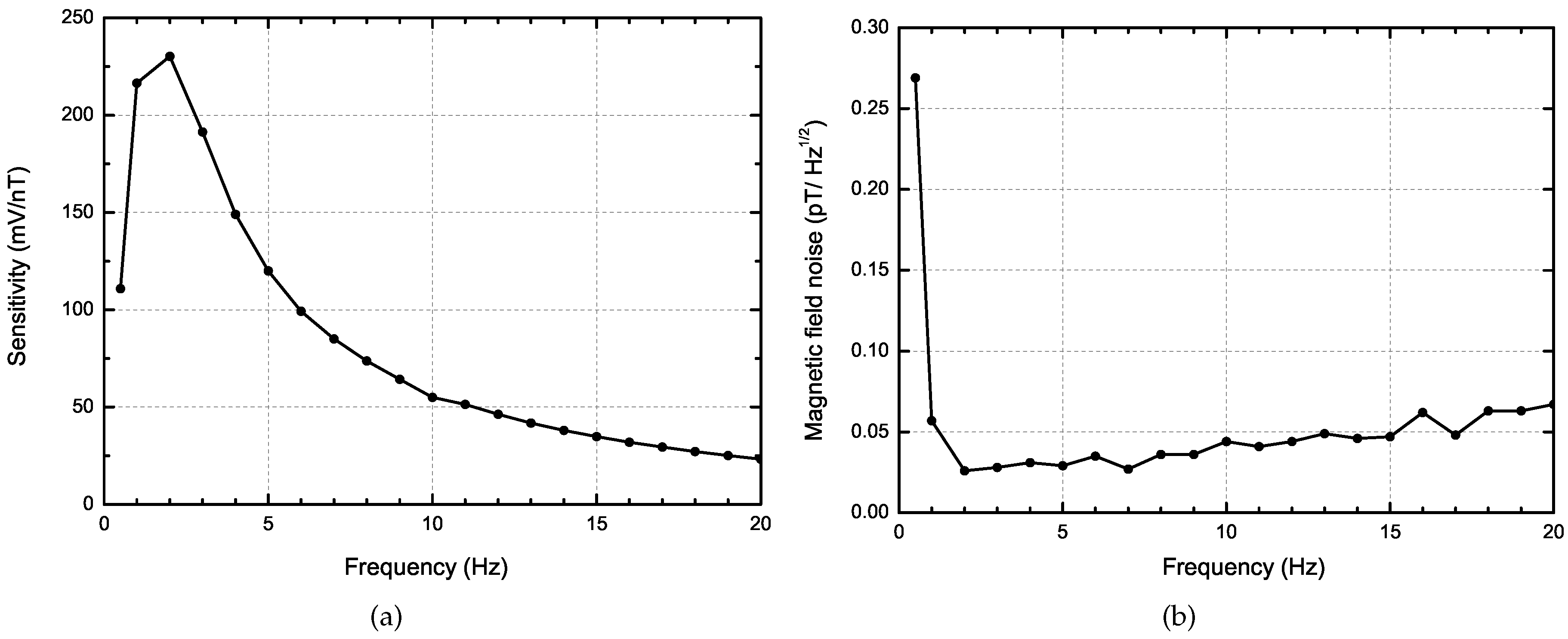
| Sensitivity | 216 mV/nT at 1 Hz |
| Spectral Noise | 0.057 pT at 1 Hz |
| Working Voltage | ±3 V∼±5 V |
| Power Consumption | 3∼5 mW |
| Product Size | Ø 44 mm × 470 mm |
| Weight | <1 kg |
References
- King, R.W.P. Lateral electromagnetic waves from a horizontal antenna for remote sensing in the ocean. IEEE Trans. Antennas Propag. 1989, 37, 1250–1255. [Google Scholar] [CrossRef]
- Holmes, J.J. Exploitation of A Ship’s Magnetic Field Signatures, 1st ed.; Morgan and Claypool Publishers: Denver, CO, USA, 2006. [Google Scholar]
- Huang, Y.; Wu, L.H.; Sun, F. Underwater continuous localization based on magnetic dipole target using magnetic gradient tensor and draft depth. IEEE Geosci. Remote Sens. Lett. 2014, 11, 178–180. [Google Scholar] [CrossRef]
- Helamaa, M.; Nikoskinen, K. Magnetic signature caused by a propeller rotating in external magnetic field. In Proceedings of the International Conference on Underwater Defence Technology, Nice, France, 29 June–1 July 1999; pp. 93–96. [Google Scholar]
- Zolotarevskii, Y.; Bulygin, F.; Ponomarev, A. Methods of measuring the low-frequency electric and magnetic fields of ships. Meas. Technol. 2005, 11, 1140–1144. [Google Scholar] [CrossRef]
- Birsan, M. Measurement of the extremely low frequency (ELF) magnetic field emission from a ship. Meas. Sci. Technol. 2011, 22, 1–5. [Google Scholar] [CrossRef]
- Xiong, L.; Jiang, R.X.; Gong, S.G. Ship modeling method of shaft-ELFE in shallow sea. J. Natl. Univ. Def. Technol. 2013, 36, 98–103. [Google Scholar]
- Wu, Z.; Zhu, X.; Li, B. Modeling and measurements of alternating magnetic signatures of ships. Sens. Transducers 2015, 186, 161–167. [Google Scholar]
- Sun, Y.-H.; Lin, C.-S.; Jia, W.-D.; Zhai, G.-J. Analysis and Measurement of Ship Shaft-Rate Magnetic Field in Air. Prog. Electromagn. Res. M (PIER M) 2016, 52, 119–127. [Google Scholar] [CrossRef]
- Sommerfeld, A. On the propagation of waves in wireless telegraphy. Ann. Phys. 1909, 28, 665–736. [Google Scholar] [CrossRef]
- Baños, A. Dipole Radiation in the Presence of a Conducting Half-Space; Pergamon: New York, NY, USA, 1966. [Google Scholar]
- Wait, J.R. Electromagnetic Waves in Stratified Media, 2nd ed.; IEEE Press: Piscataway, NJ, USA, July 1966; pp. 120–122. [Google Scholar]
- Felsen, L.B.; Marcuvits, N. Radiation and Scattering of Waves; Wiley-IEEE Press: Piscataway, NJ, USA, 15 January 1994. [Google Scholar]
- Chew, W.C. Waves and Fields in Inhomogeneous Media; Wiley-IEEE Press: Piscataway, NJ, USA, January 1995. [Google Scholar]
- Michalski, K.; Mosig, J.R. Multilayered media Green’s functions in integral equation formulations. IEEE Trans. Antennas Propag. 1997, 45, 508–519. [Google Scholar] [CrossRef]
- Wang, J.; Li, B. Electromagnetic fields generated above a shallow sea by a submerged horizontal electric dipole. IEEE Trans. Antennas Propag. 2017, 65, 2707–2712. [Google Scholar] [CrossRef]
- Bubenik, D.M. A practical method for the numerical evaluation of Sommerfeld integrals. IEEE Trans. Antennas Propag. 1977, 25, 904–906. [Google Scholar] [CrossRef]
- Shanks, D. Non-linear transformations of divergent and slowly convergent sequences. J. Math. Phys. 1955, 34, 1–42. [Google Scholar] [CrossRef]








| Parameters | Values |
|---|---|
| Dipole Direction | x-directed |
| Current Moment (Il) | 40 A·m |
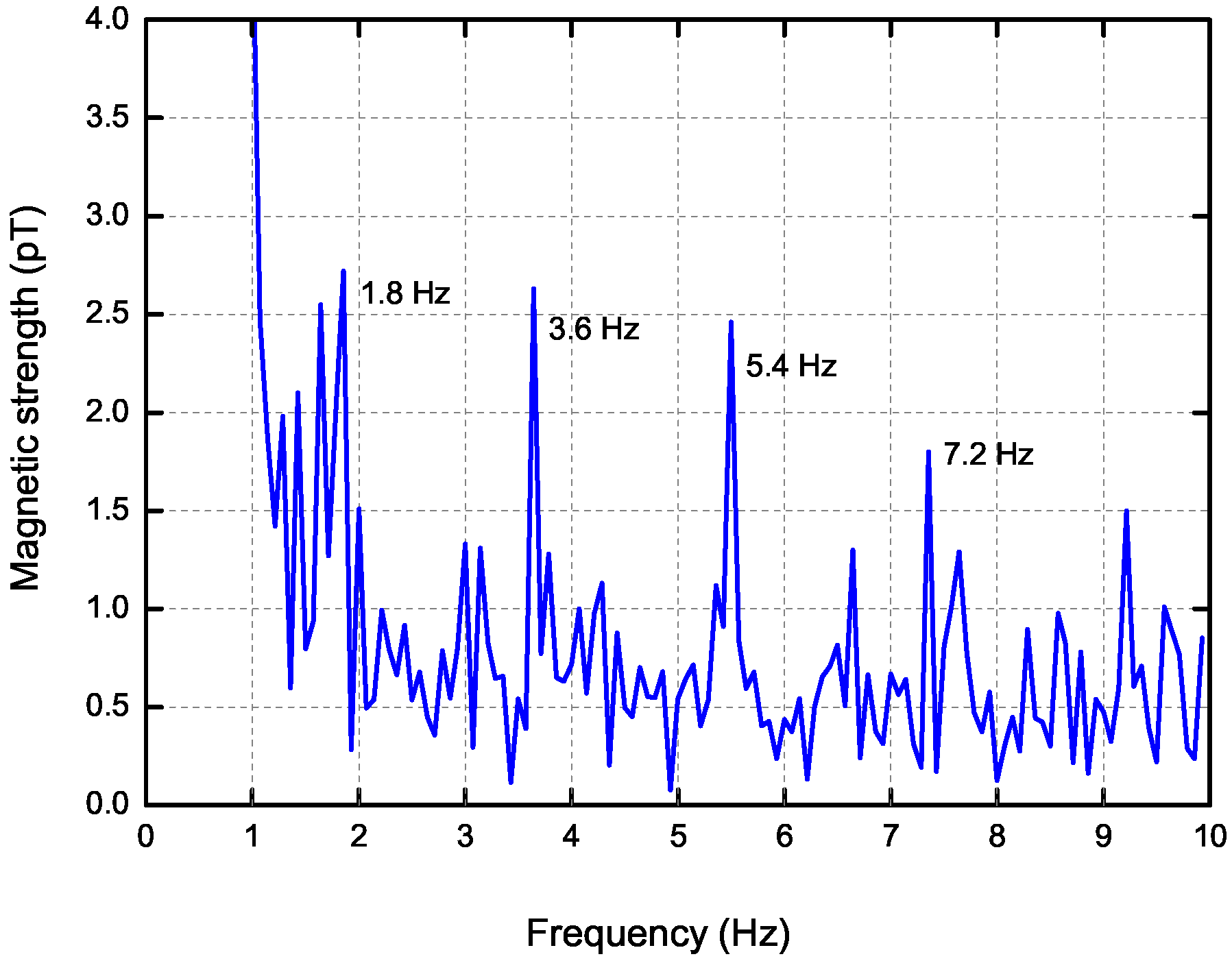
| Frequencies (f) | 1.8 Hz, 3.6 Hz, 5.4 Hz |
| Dipole Depth (d) | ∼2 m |
| Horizontal Distances () | 0∼2000 m |
| Azimuthal Angle () | ∼ (i.e., the y-direction) |
| Receiver Heights (z) | magnetic sensor at m |
| electric sensor at m | |
| Boundary Positions | sea surface at m |
| seafloor interface at m (average) | |
| Relative Permittivity () | , , |
| Permeability () | H/m |
| Conductivity | S/m, S/m, S/m |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Li, B.; Chen, L.; Li, L. A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors. Sensors 2017, 17, 1734. https://doi.org/10.3390/s17081734
Wang J, Li B, Chen L, Li L. A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors. Sensors. 2017; 17(8):1734. https://doi.org/10.3390/s17081734
Chicago/Turabian StyleWang, Jinhong, Bin Li, Lianping Chen, and Li Li. 2017. "A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors" Sensors 17, no. 8: 1734. https://doi.org/10.3390/s17081734
APA StyleWang, J., Li, B., Chen, L., & Li, L. (2017). A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors. Sensors, 17(8), 1734. https://doi.org/10.3390/s17081734