Deformation Monitoring of Metro Tunnel with a New Ultrasonic-Based System




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
2.1. Principles of Sensor Coordinates Determination
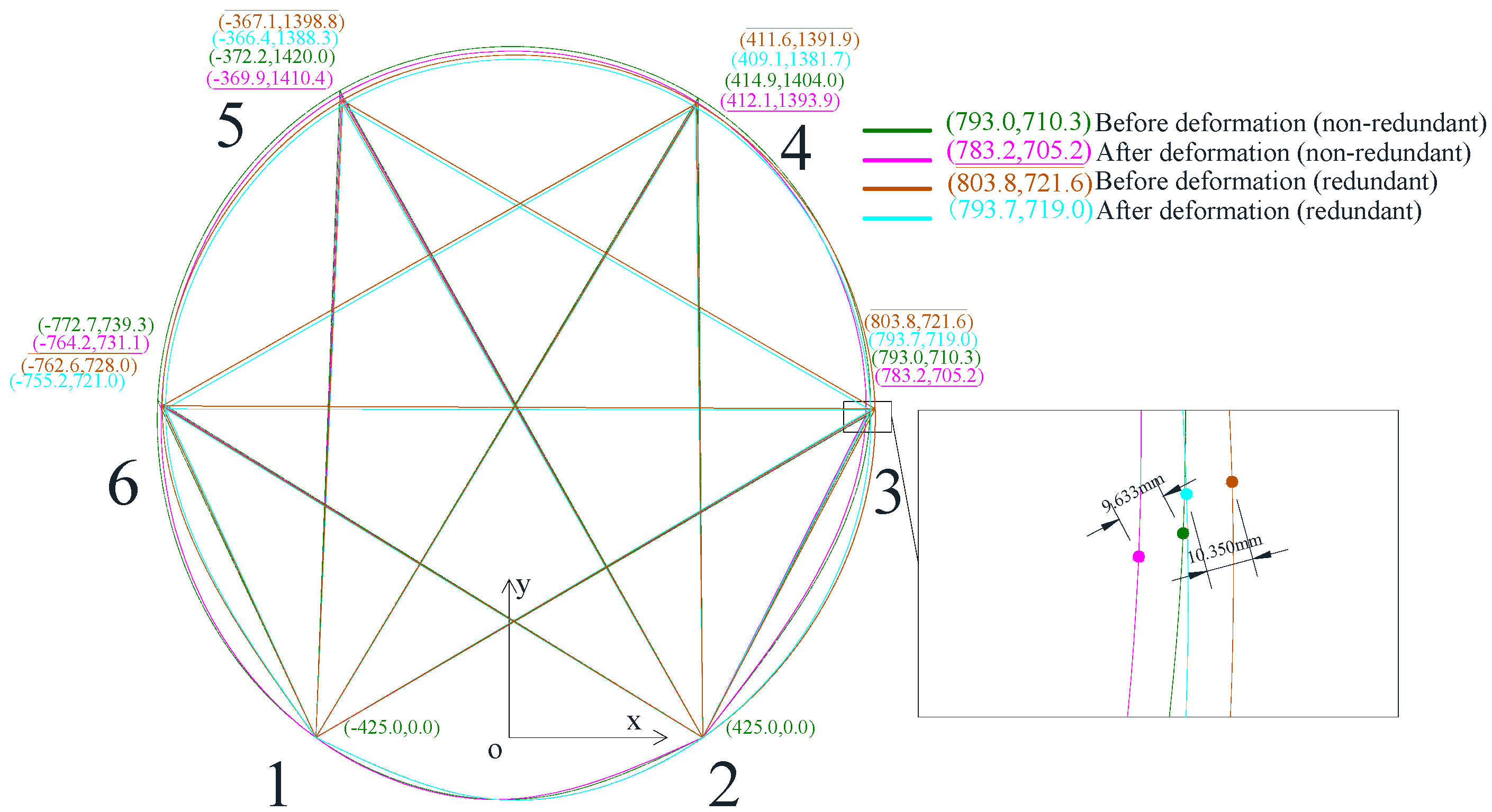
2.2. The RUI Method
3. Test Results and Analysis
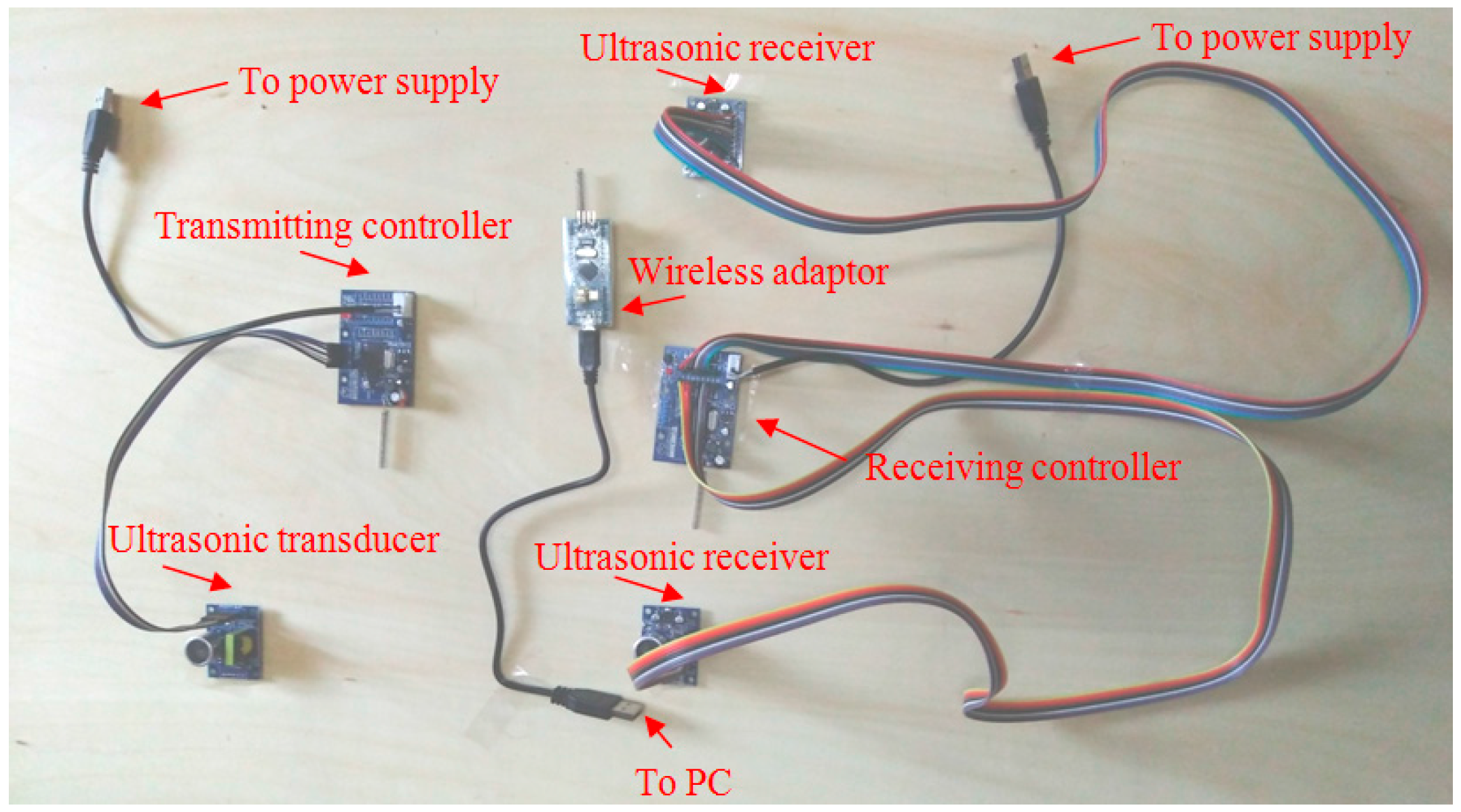
3.1. Ultrasonic Distance Measurement System
3.2. Distance Measurement Accuracy Is Susceptible to Distance and Probe Angles
3.3. Tunnel Deformation Measurement
4. Discussion
4.1. Influence of Distances, Probe Angles, and Temperatures on Measurement Accuracy
- (1)
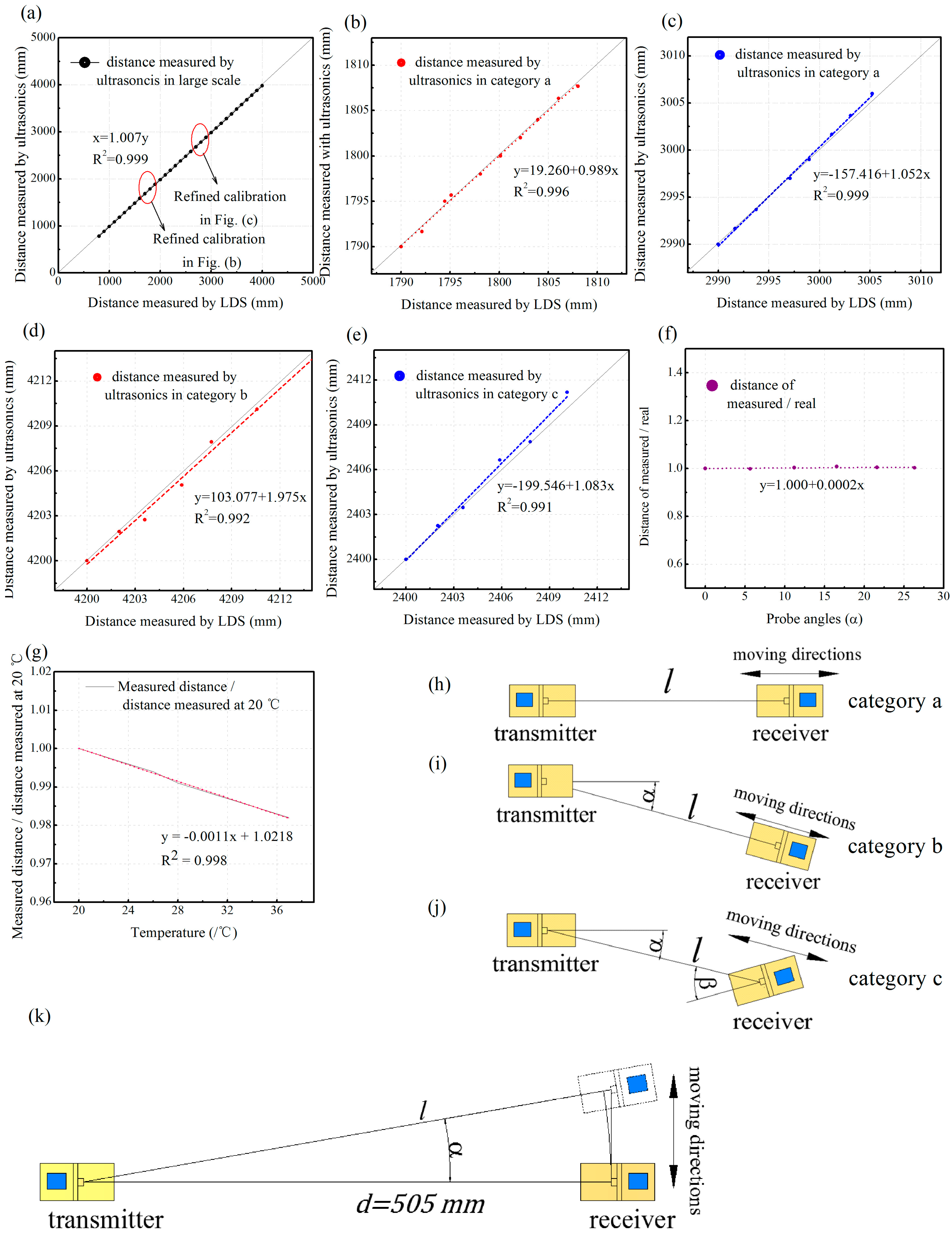
- The test of the accuracy with varied measurement distances. One ultrasonic transmitter and one ultrasonic receiver were placed 800 mm opposite each other on a line, strictly. The transmitter was then controlled by the computer to emit three beams of ultrasonics with random intervals, and the durations between the beams emitted from the transmitter and the response from the receiver were recorded and converted into distances. Then, increasing the distance between the sensors by 100 mm per step, we recorded the distance measured by the ultrasonics transducers and LDS with maximum distance of 4000 mm. Results show that the ultrasonic transducers prove to have good linearity (R2 = 0.999) and accuracy of distance measurement.
- (2)
- The resolutions of deformation measurement with varying distances, angles, and misplacements were further verified in the laboratory tests. For the deformation monitoring of a metro tunnel, the resolution of the ultrasonic system to the tiny changes of distance is more concerned than the absolute distance measured by the ultrasonic transducer. The results show that the ultrasonic transducers have the ability to capture distance variations of less than 2 mm.
- (3)
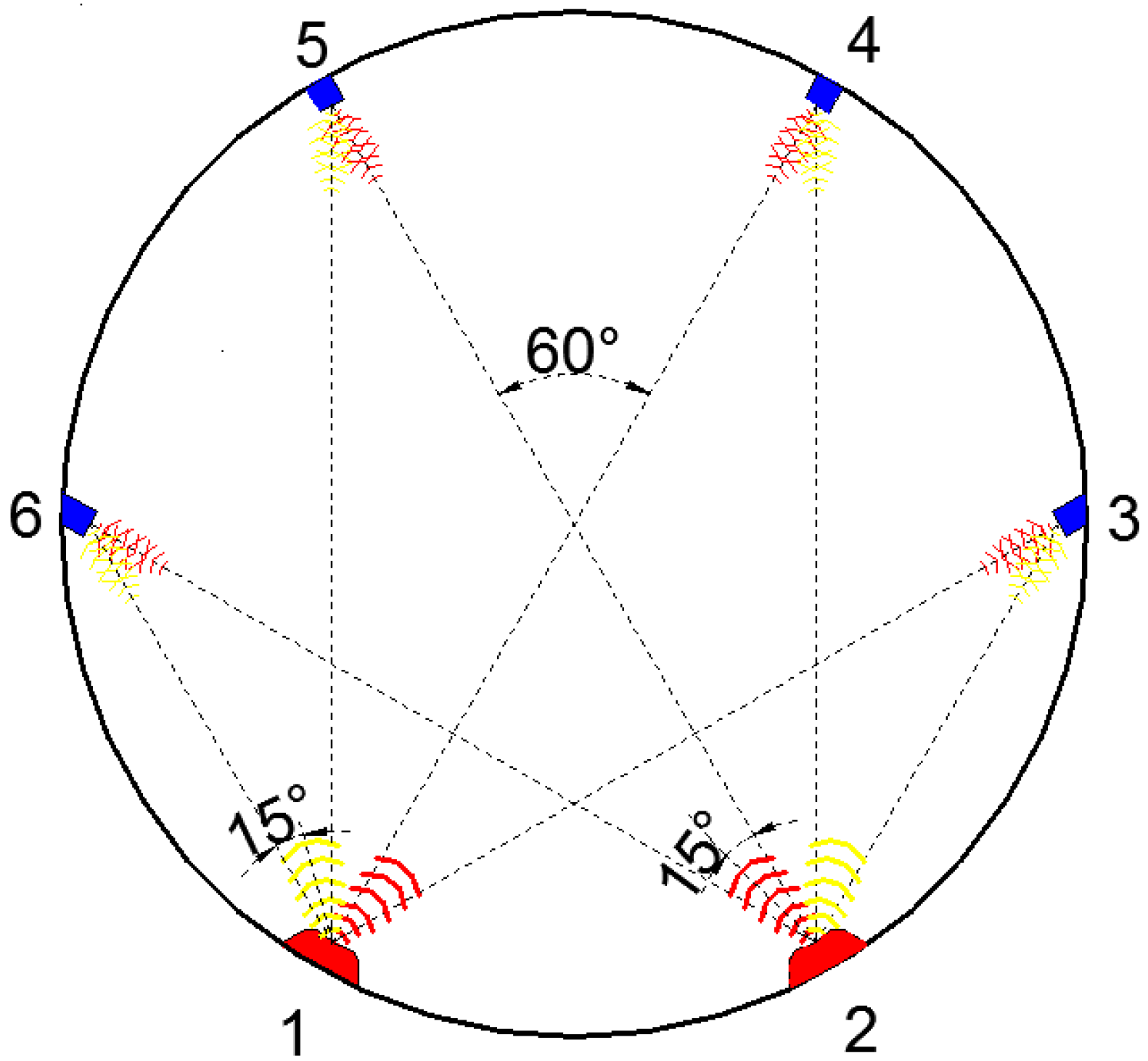
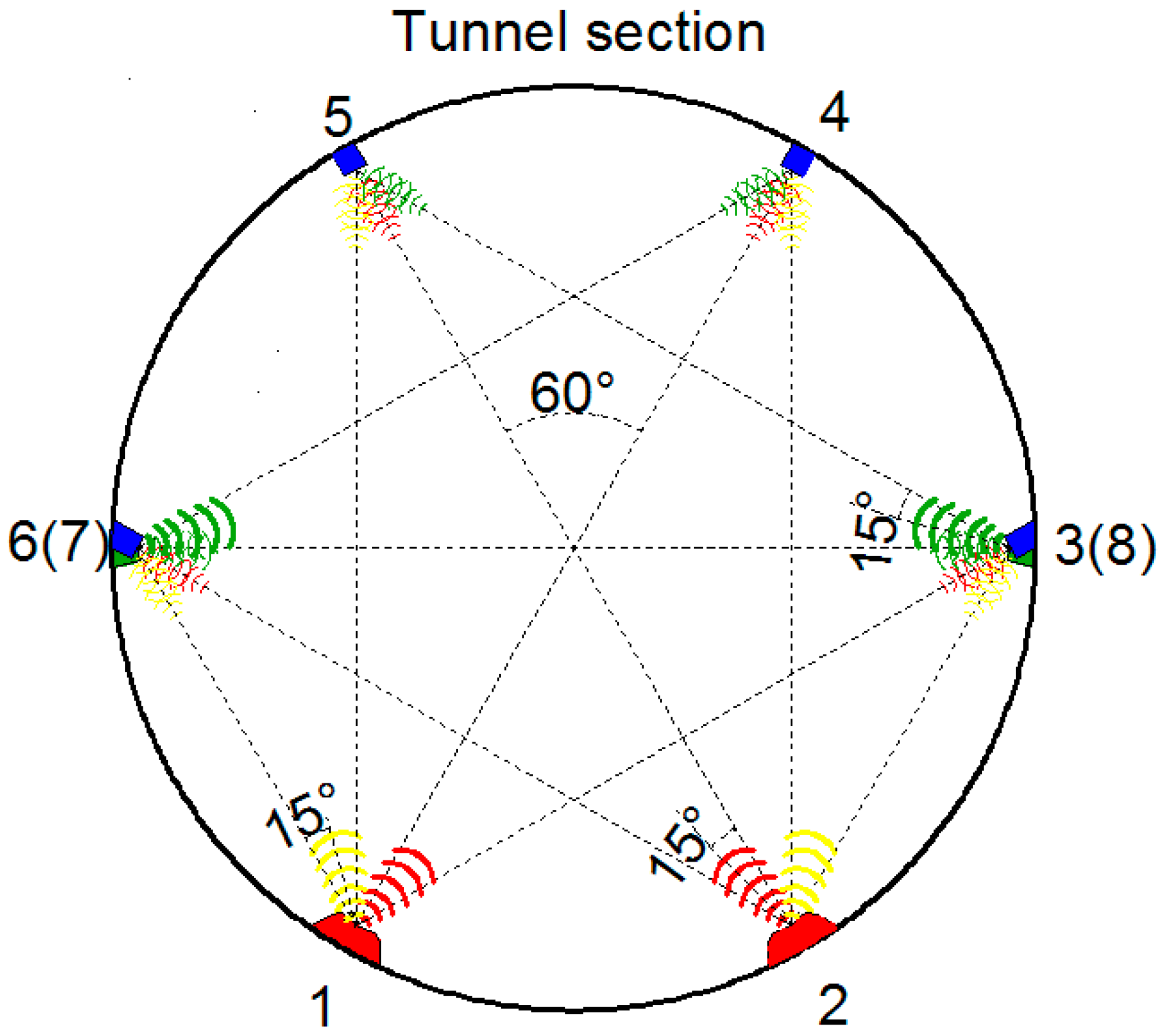
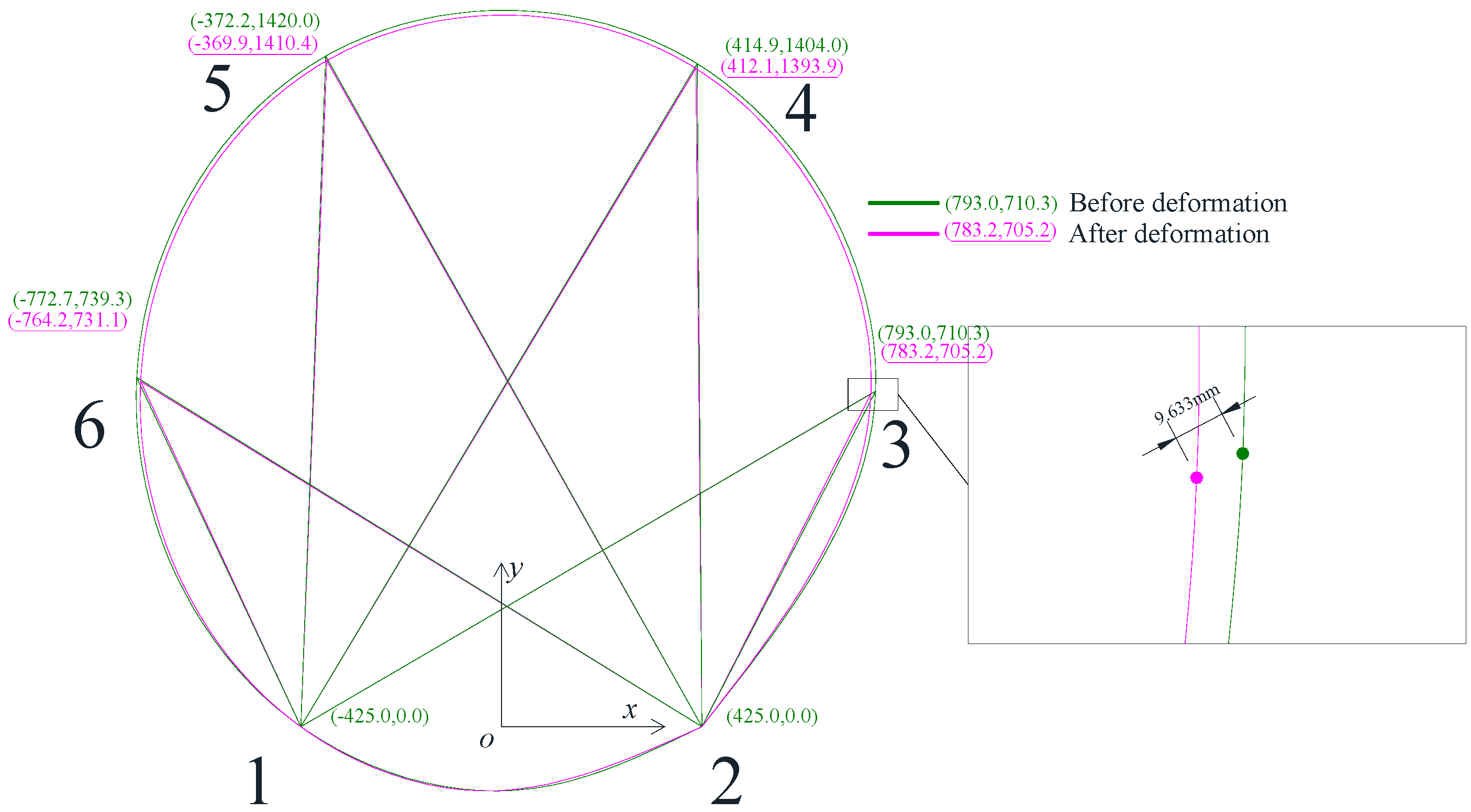
- The changed probe angles during measurement was also investigated by considering two kinds of transmitter–receiver pair relative positions (as indicated in Figure 2 and Figure 4). One is the probe of the receiver, just oriented to the transmitter, but the probe of the transmitter has a 15° angle with the receiver. The other is when the probe of the receiver has a 30° deviation to the transmitter and the probe of the transmitter has a 15° angle with the receiver. To test whether these configurations will lead to an inaccurate measurement, a configuration that the transmitter was dead against the receiver was also tested. Calibration tests of the probe angles on ultrasonic distance measurements reveal that the ultrasonic measured distances were still linear proportional to the real ones, and the deviations can be offset by introducing proper coefficients. When the transducer pair has an angle or misplacement among itself, it could always perceive the change of distance as less than 2 mm.
- (4)
- The influence of temperature on ultrasonic distance measurements was examined and the results indicate the distance measured by the ultrasonic transducers will be affected by the temperature. The measured values have a close linear relationship with temperature variations (R2 = 0.998). Thus, the temperature effect could be eliminated by adding the thermal transducer, as well as by setting the corresponding compensation formula.
4.2. Discussion of the Proposed RUI Wireless System
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Riedel, H. Chinese metro boom shows no sign of abating. Int. Railway J. 2014, 54, 46–52. [Google Scholar]
- Tsuji, T.; Ishibashi, J.; Ishitsuka, K.; Kamata, R. Horizontal sliding of kilometre-scale hot spring area during the 2016 Kumamoto Earthquake. Sci. Rep. 2017, 7, 42947. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Sun, D.A.; Sun, J.; Fu, D.; Dong, P. Soil disturbance of Shanghai silty clay during EPB tunnelling. J. Tunnel. Undergr. Space. Tech. 2003, 18, 537–545. [Google Scholar] [CrossRef]
- Chen, J.J.; Zhang, L.; Zhang, J.F.; Zhu, Y.F.; Wang, J.H. Field tests, modification, and application of deep soil mixing methodin soft clay. J. Geotech. Geoenviron. Eng. 2013, 139, 24–34. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Huang, M.S. Geotechnical influence on existing subway tunnels induced by multiline tunneling in shanghai soft soil. Comput. Geotech. 2014, 56, 121–132. [Google Scholar] [CrossRef]
- Arastounia, M. Automated As-Built Model Generation of Subway Tunnels from Mobile LiDAR Data. Sensors 2016, 16, 1486. [Google Scholar] [CrossRef] [PubMed]
- Alhaddad, M; Wilcock, M.; Gue, C.Y.; Bevan, H.; Stent, S.; Elshafie, M.; Soga, K.; Devriendt, M.; Wright, P.; Waterfall, P. Multi-Suite monitoring of an existing cast iron tunnel subjected to tunnelling-induced ground movements. Proc. Geo-Shanghai 2014. [Google Scholar] [CrossRef]
- Ding, Y.C.; Dai, B.; Wang, J.H. Field observation of a deep excavation adjacent to subway tunnels. J. Beijing Univ. Technol. 2008, 34, 492–497. [Google Scholar]
- Luo, Y.; Chen, J.; Xi, W.; Zhao, P.; Qiao, X.; Deng, X.; Liu, Q. Analysis of tunnel displacement accuracy with total station. Measurement 2016, 83, 29–37. [Google Scholar] [CrossRef]
- Mohamad, H.; Soga, K.; Bennett, P.J.; Mair, R.J.; Lim, C.S. Monitoring twin tunnel interaction using distributed optical fiber strain measurements. J. Geotech. Geoenviron. Eng. 2012, 138, 957–967. [Google Scholar] [CrossRef]
- Wang, X.; Shi, B.; Wei, G.Q.; Chen, S.-E.; Zhu, H.-H.; Wang, T. Monitoring the behavior of segment joints in a shield tunnel using distributed fiber optic sensors. Struct. Control Health Monit. 2017, in press. [Google Scholar] [CrossRef]
- Muller, F.P. Survey on ranging sensors and cooperative techniques for relative positioning of vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef] [PubMed]
- David, J.; Cheeke, N. Fundamentals and Applications of Ultrasonic Waves; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Jiang, L.; Yan, J.; Zang, X.; Zhao, J. Localization research based on special fusion method for redundancy ultrasonic information. In Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007. [Google Scholar]
- Kech, W.; Heller, G.S.; Nixon, J. Intensity distribution in ultrasonic beams. J. Acoust. Soc. Am. 1949, 21, 469. [Google Scholar] [CrossRef]
- Licznerski, T.J.; Jaroński, J.; Kosz, D. Ultrasonic system for accurate distance measurement in the air. Ultrason 2011, 51, 960–965. [Google Scholar] [CrossRef] [PubMed]
- Mahajan, A.; Figueroa, F. An automatic self-installation and calibration method for a 3D position sensing system using ultrasonics. Robot. Auton. Syst. 1999, 28, 281–294. [Google Scholar] [CrossRef]









© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.-S.; Zhao, Y.-M.; Liu, H.-B.; Zhu, H.-H. Deformation Monitoring of Metro Tunnel with a New Ultrasonic-Based System. Sensors 2017, 17, 1758. https://doi.org/10.3390/s17081758
Xu D-S, Zhao Y-M, Liu H-B, Zhu H-H. Deformation Monitoring of Metro Tunnel with a New Ultrasonic-Based System. Sensors. 2017; 17(8):1758. https://doi.org/10.3390/s17081758
Chicago/Turabian StyleXu, Dong-Sheng, Yu-Meng Zhao, Hua-Bei Liu, and Hong-Hu Zhu. 2017. "Deformation Monitoring of Metro Tunnel with a New Ultrasonic-Based System" Sensors 17, no. 8: 1758. https://doi.org/10.3390/s17081758
APA StyleXu, D. -S., Zhao, Y. -M., Liu, H. -B., & Zhu, H. -H. (2017). Deformation Monitoring of Metro Tunnel with a New Ultrasonic-Based System. Sensors, 17(8), 1758. https://doi.org/10.3390/s17081758