Terrestrial Laser Scanner Two-Face Measurements for Analyzing the Elevation-Dependent Deformation of the Onsala Space Observatory 20-m Radio Telescope’s Main Reflector in a Bundle Adjustment

 ,
, 
Abstract
:1. Motivation
- Scanning the main reflector in two opposite cycles so that each part of the main reflector is sampled in two faces (Section 2).
- Proving the applicability of TLS (Terrestrial Laser Scanner) for elevation-dependent deformation analyses of radio telescopes by investigating the measurement’s accuracy in detail (Section 3).
- Analyzing the elevation-dependent deformation considering relevant systematic measurement errors based on an improved measurement and data-processing concept in a bundle adjustment (Section 4).
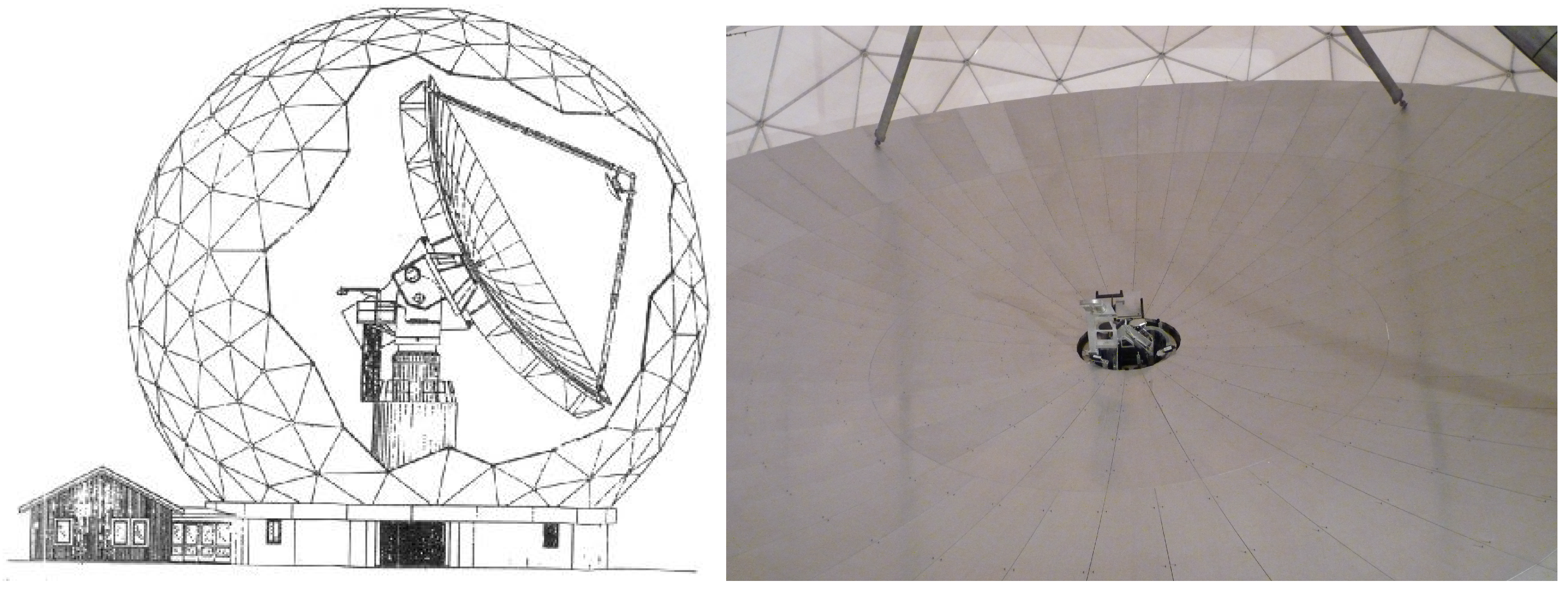
2. Measurement Concept
- Spatial resolution: 1.6 mm at 10 m distance. This high point sampling is not necessary for the parameter estimation but it helps at determining spatial correlations in laser scans which is the task of a further study.
- Spatial coverage: Complete scan of 360 horizontal and 270 vertical coverage (full vertical field-of-view).
- Quality level: The Leica Scan Station P20 requires the user to specify a quality level. The larger the quality level, the more points being consecutively measured are averaged to minimize random errors in the measured distances. This moving average most probably leads to a larger correlation between the scan points with unknown error distribution that would have to be accounted for in the deformation analysis. Hence, although a high quality level would indeed increase the precision of the distance measurement, the lowest quality level (level “1”, no averaging) was chosen.
3. Preliminary Accuracy Evaluation of Measurements
- The atmospheric conditions did not vary noticeably with time during the measurements due to cloudiness: The absolute air temperature was 14.1 Celsius on average, the variation smaller than 0.2 Celsius. Since the measured distances are only between 7 and 13 m, systematic errors in the measured distances due to atmosphere can, thus, be neglected regarding the total error budget of laser scanners.
- The scanning geometry is chosen considering angles of incidence of up to 45. Thus, systematic errors in the measured distance due to large angles of incidence, as investigated by [24], can be neglected.
- The panels of the main reflector are bare aluminium with a light gray color but manufactured very smoothly to receive radio signals of small wavelengths. Hence, the intensity of the reflected laser spot and the random errors that are governed by this intensity [25] have to be investigated further (see Section 3.3).
- Systematic errors due to laser scanner misalignment have already been proven to be a limiting factor for deformation analyses. Consequently, they also have to be investigated further (see Section 3.2).
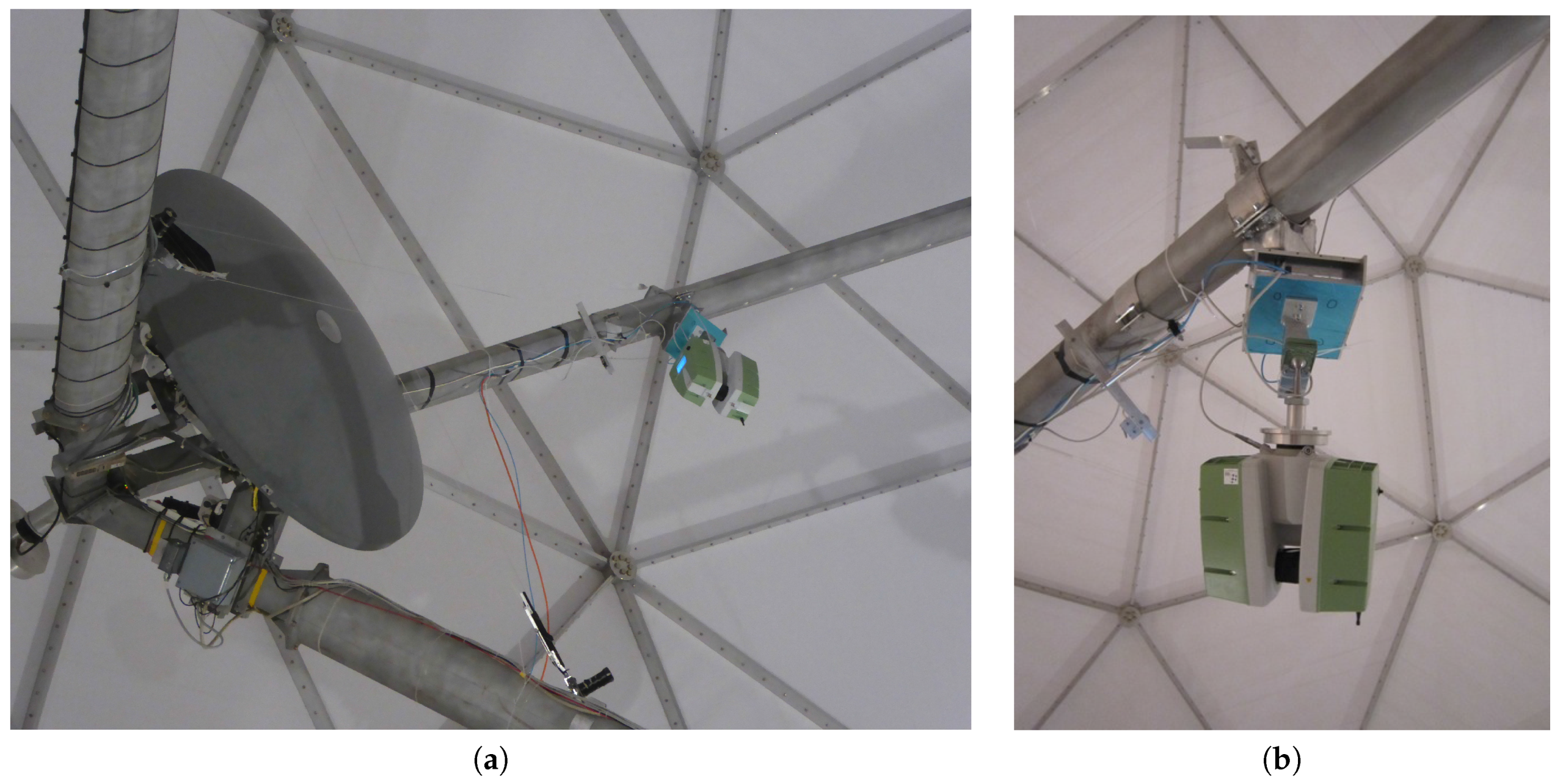
3.1. Stability of Laser Scanner Mounting
3.2. Systematic Errors Due to Misalignment of the TLS
- The observations of the TLS are pre-processed by the manufacturer before made available for the operator. Here, the original measurements are corrected by unknown calibration functions. The calibration parameters used herein are determined during manufacturing; they vary with temperature. Consequently, the remaining errors due to misalignment that we want to estimate here are temperature-dependent and do only represent rest effects that are not handled by the manufacturer’s pre-calibration.
- Since the mechanical construction of a TLS is complex, there are still different opinions about which calibration parameters to estimate. On the one hand, there are empirical parameters [8,26], on the other hand, there are mechanical parameters introduced by [11] and adopted by [13] who coincide to a large amount, but not in total. With both strategies, systematic errors can be reduced but the parameter estimates vary.
- You cannot measure single scan points repeatedly so that a sophisticated network of reference objects has to be build up for estimating the calibration parameters. Only at optimal networks, the calibration parameters are assumed to be stable.
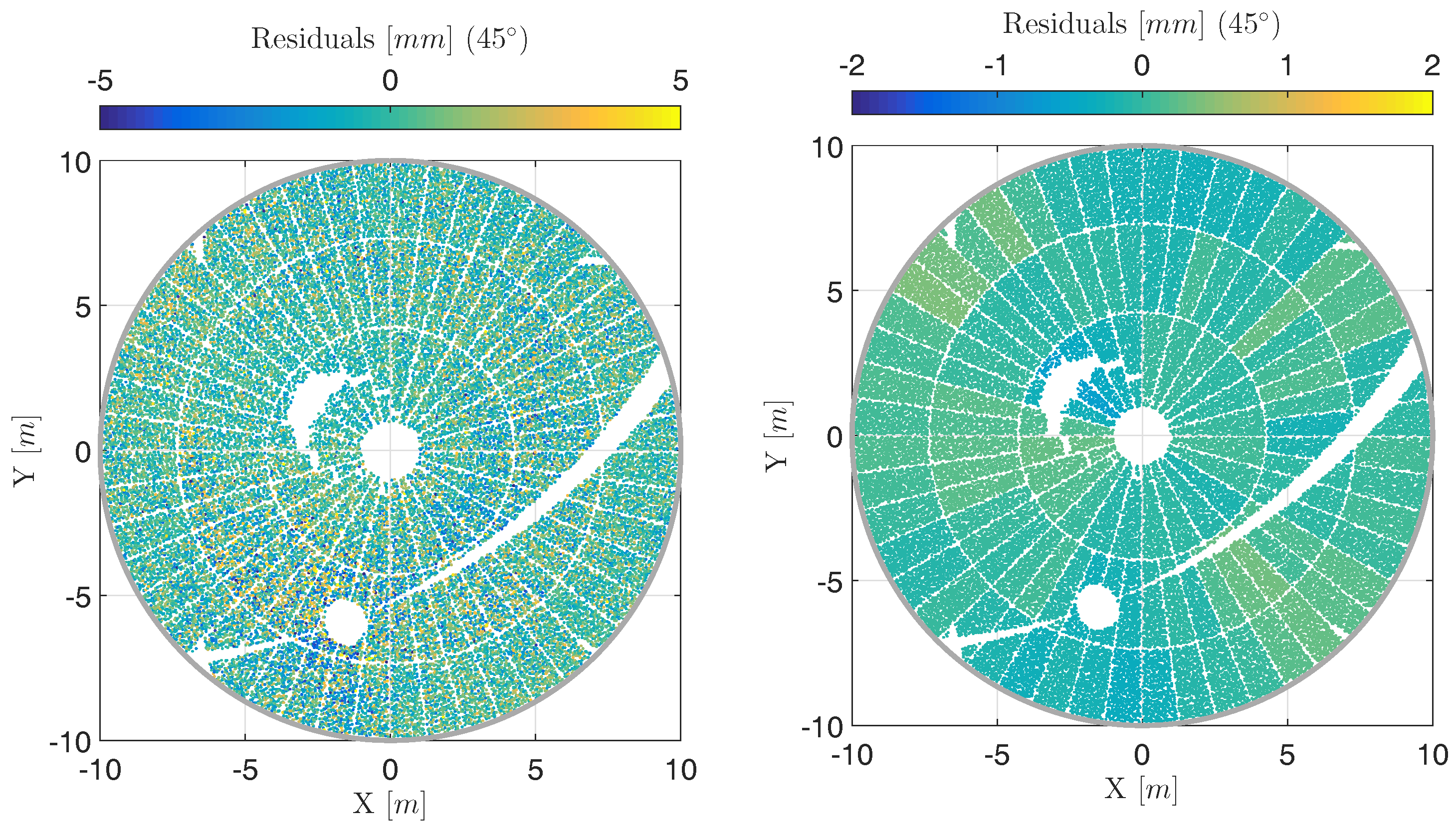
- The calibration parameters and influence the horizontal direction by a factor of . This factor is not well defined at zenith and its close proximity. Hence, scan points with are eliminated leading to a circular gap in the point cloud.
- The scanner does not rotate exactly 180 around its vertical axis but 184 for each cycle, e.g., from . Consequently, there are always 4 of overlap between cycle 1 and cycle 2 or face 1 and face 2, respectively. The scan points in these overlaps cannot be assigned to face 1 or face 2. Hence, the corresponding scan points are eliminated leading to two further gaps of elongated form.
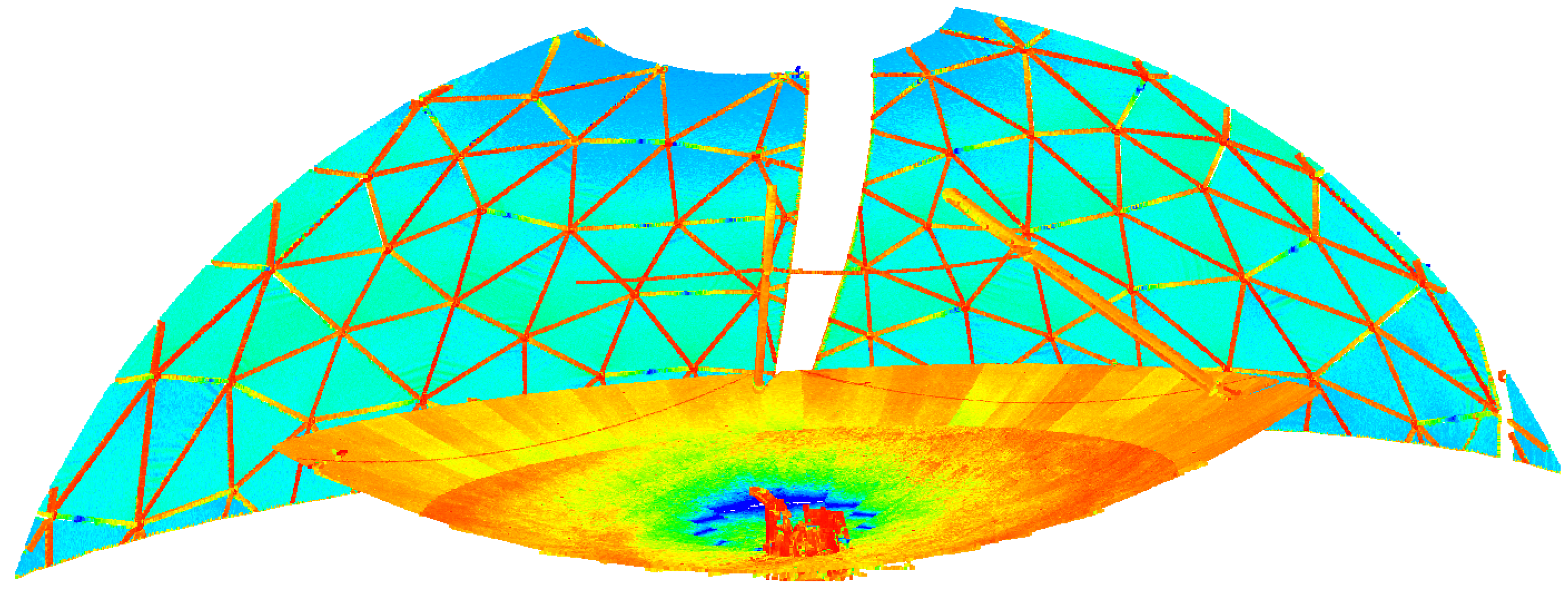
3.3. Precision of Distance Measurements
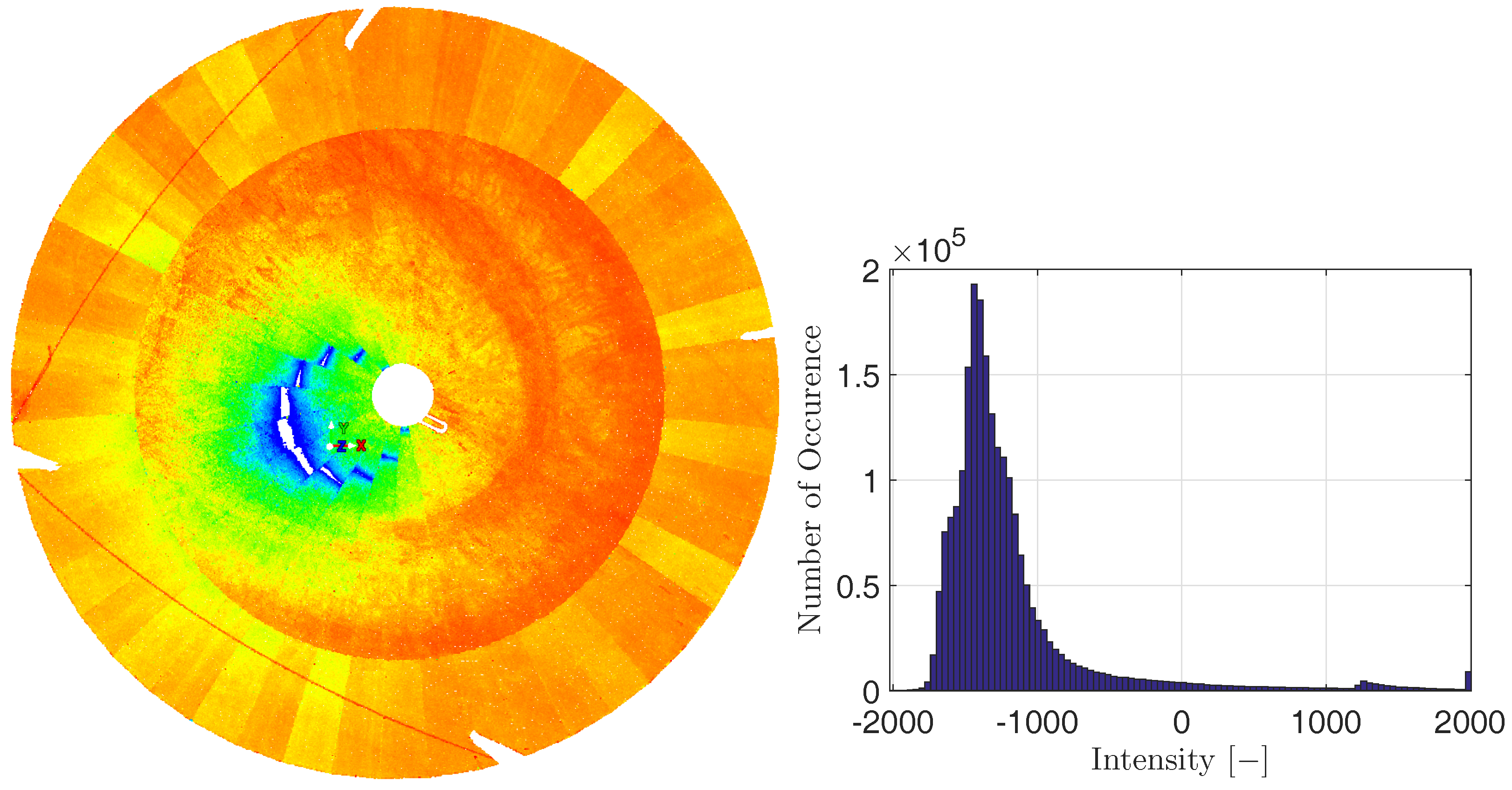
- The positions where the intensity is very high (dark blue), the angle of incidence is about 5 or even less. In the vicinity of angle of incidences around 0, the reflected intensity is so high that the reflected impulse cannot be processed by the scanner due to blooming. This leads to gaps in the point cloud. The sensitivity of this blooming regarding the angle of incidence can be seen since the position of theses gaps changes between different panels of the main reflector.
- At angles of incidence from 5 to about 10, the intensity decreases slightly (colored from light blue to green).
- At angles of incidence larger than about 10 to the maximum values of about 45, the intensity is not governed by the incidence angle anymore (colored from yellow to red). Here, rather the surface properties govern the intensity since individual panels can be distinguished for the intensity values.
4. Analysis of Elevation-Dependent Deformations
4.1. Data Pre-Processing
4.1.1. Data Reduction
4.1.2. Object Segmentation
4.1.3. Outlier Removing
- The vertex of the main reflector: Here, the feedhorn collecting the electro-magnetic signals and further processing units are located. Hence, points inside a radius of 1 m around the vertex are removed.
- Gaps between the panels: These outliers have already been eliminated by the object segmentation.
- Blooming effects that occur at small angles of incidence (see also Section 3): The intensity given by the laser scanner ranges between a unit-less value of and +2000. An empirical threshold of 1500 is used so that points with larger intensity values are eliminated. This leads to a further small gap in the point clouds near the main reflector’s vertex.
- Common gross errors in the distance measurement that are, amongst others, due to the electronic processing or small anomalies in the surface’s reflectivity: These outliers are removed in a pre-adjustment eliminating points with estimated absolute residuals larger than 7 mm (empirically determined).
4.2. Parameterization of Laser Scans in Each Elevation Angle
4.3. Bundle Adjustment of All Laser Scans
- Simply measuring the object in two faces: By combining both point clouds, all two-face sensitive errors can be minimized.
- Calibrating the laser scanner in situ: The calibration parameters are estimated along with the deformation parameters.
4.4. Results of Adjustment
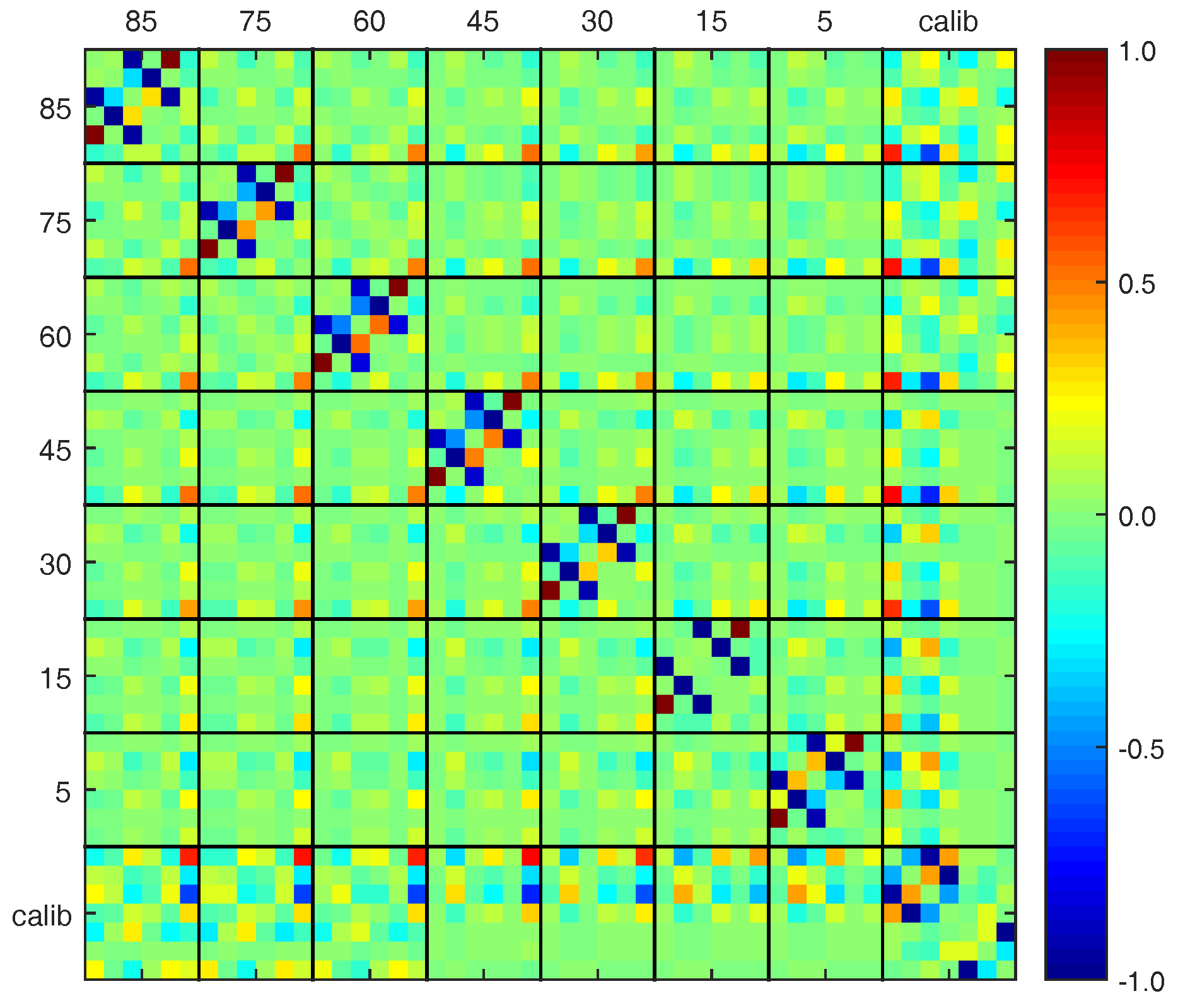
4.4.1. Parameter Correlations
- Do the two-face measurements improve the separability between object and calibration parameters?
- Does the bundle adjustment improve the separability between object and calibration parameters?
4.4.2. Calibration Parameters
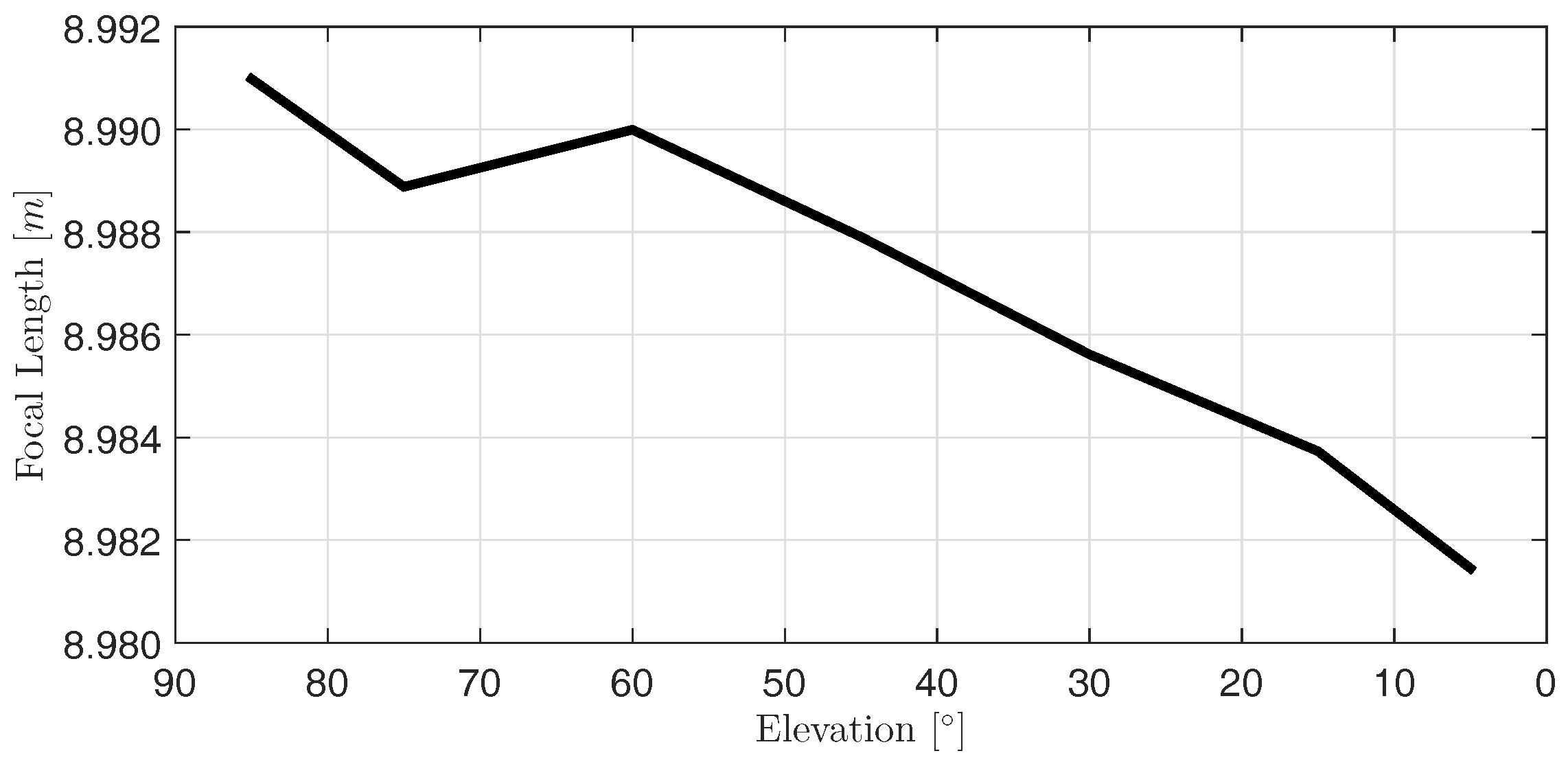
4.4.3. Object Parameters
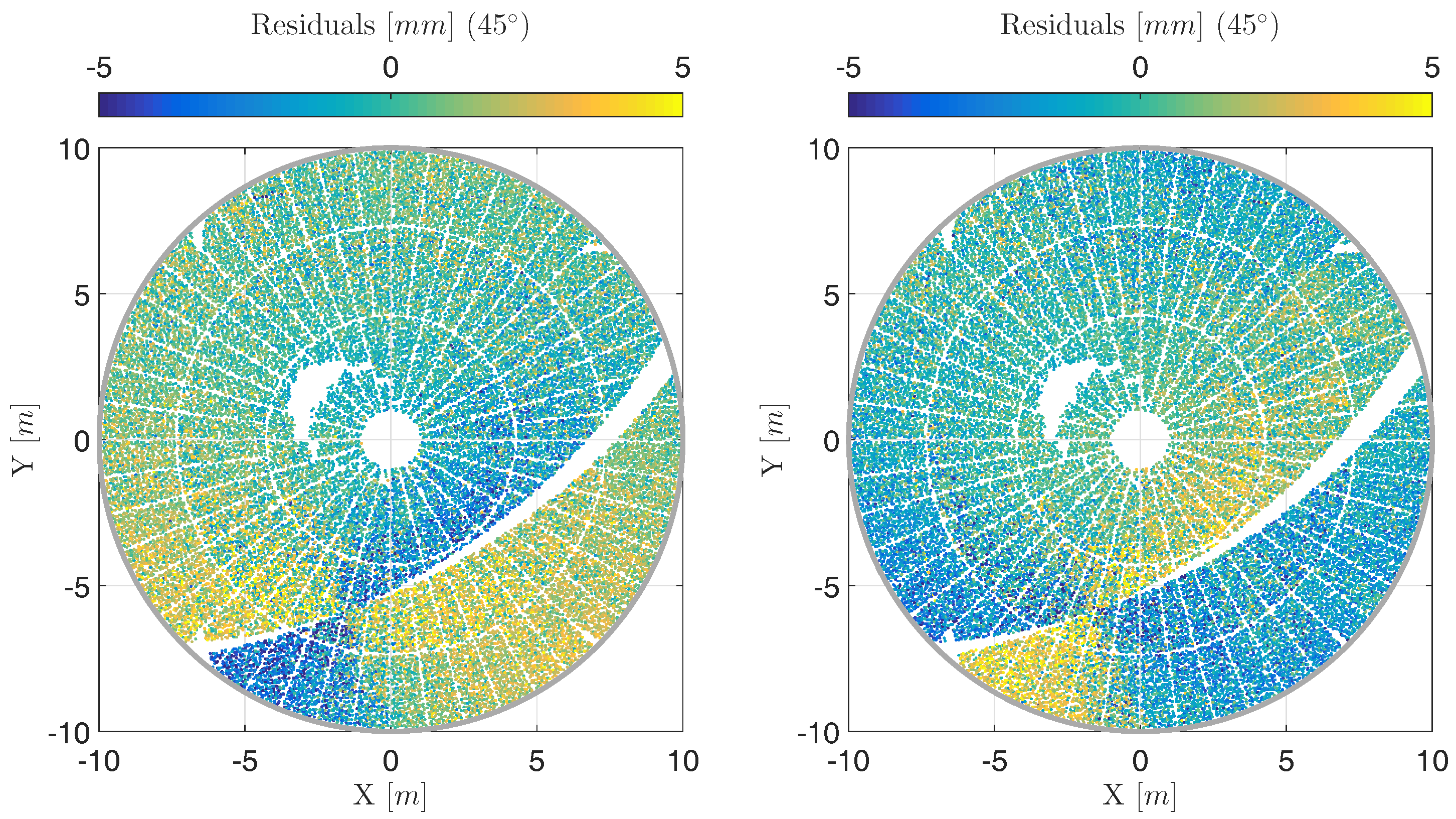
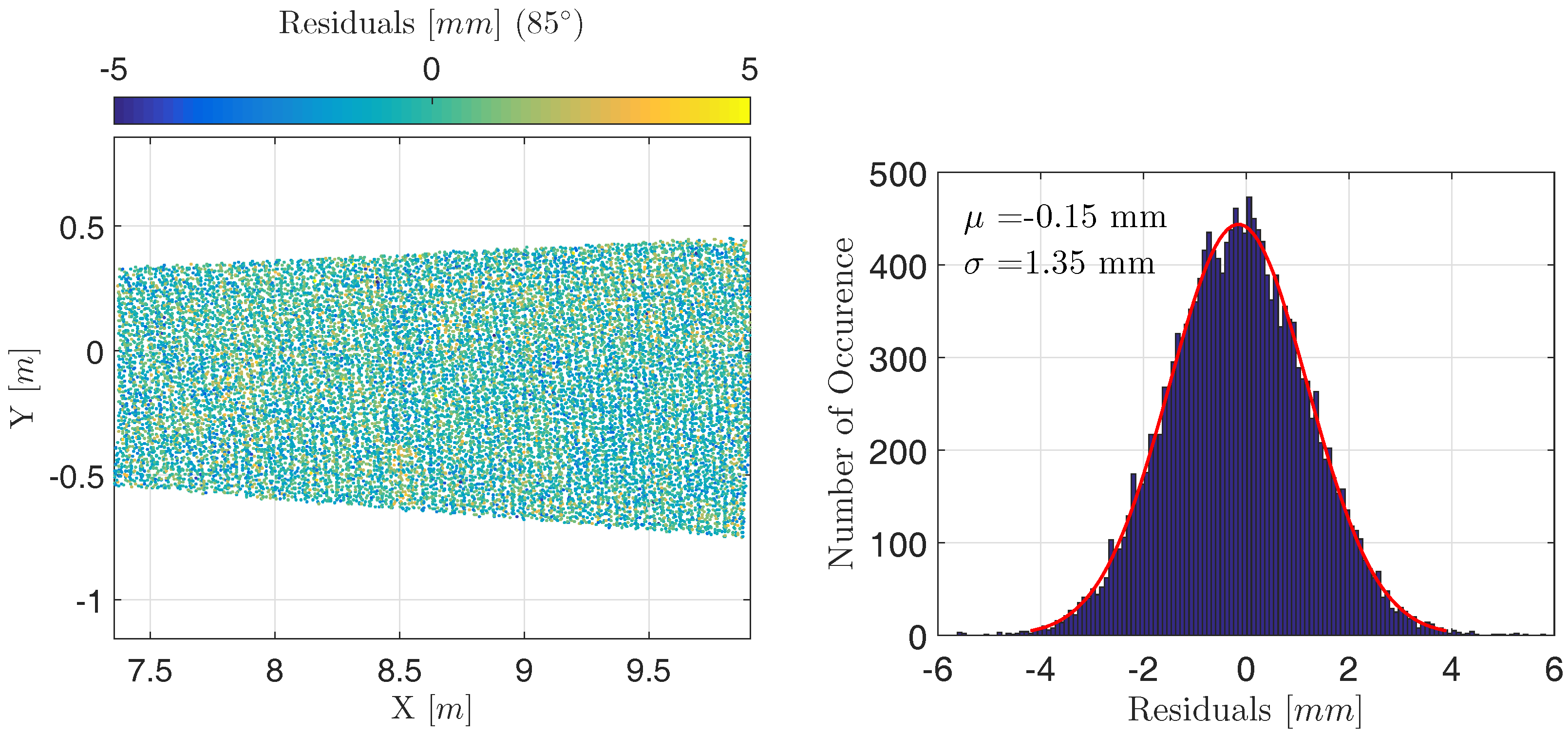
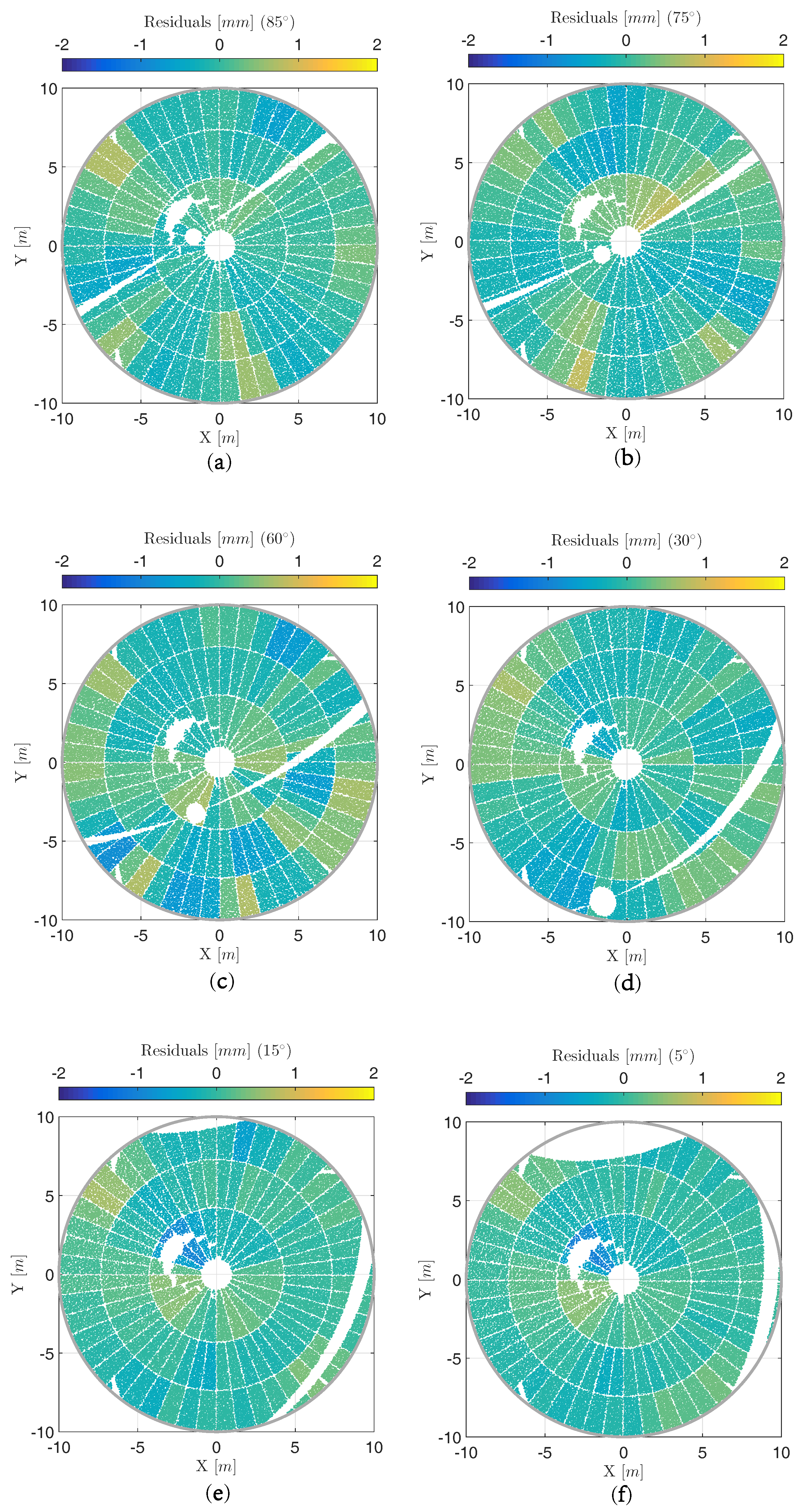
4.4.4. Post-Fit Residuals
5. Conclusions and Outlook
- Scanning in two facesA new measurement concept for deformation analyses of radio telescopes’ main reflectors is proposed based on scanning in two faces to minimize systematic measurement errors due to misalignment of the TLS.
- Accuracy evaluation of TLS measurementsThe accuracy of the laser scans is evaluated by analyzing the stability of the laser scanner and by assessing the precision of the measured distances. Special focus is led onto the systematic measurement errors due to misalignment of the TLS. These preliminary investigations prove the applicability of laser scanners for the present task.
- Elevation-dependent deformation analysisFor the deformation analysis, a new concept is presented including the two-faces measurements: It is based on an in situ calibration of the laser scanner in a bundle adjustment including all elevation angles.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GHM | Gauß-Helmert Model |
| ICP | Iterative Closest Point Algorithm |
| OSO | Onsala Space Observatorium |
| TLS | Terrestrial Laser Scanner |
| VLBI | Very Long Baseline Interferometry |
References
- Ioannidis, C.; Valani, A.; Georgopoulos, A.; Tsiligiris, E. 3D model generation for deformation analysis using laser scanning data of a cooling tower. In Proceedings of the 3rd IAG/12th FIG Symposium, Baden, Germany, 22–24 May 2006. [Google Scholar]
- Van Gosliga, R.; Lindenbergh, R.; Pfeifer, N. Deformation analysis of a bored tunnel by means of terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 167–172. [Google Scholar]
- Eling, D. Terrestrisches Laserscanning für die Bauwerksüberwachung. Ph.D. Thesis, Wissenschaftliche Arbeiten der Fachrichtung Geodäsie und Geoinformatik der Leibniz Universität Hannover, Hannover, Germany, 2009. [Google Scholar]
- Wang, J. Towards Deformation Monitoring with Terrestrial Laser Scanning Based on External Calibration and Feature Matching Methods. Ph.D. Thesis, Wissenschaftliche Arbeiten der Fachrichtung Geodäsie und Geoinformatik der Leibniz Universität Hannover, Hannover, Germany, 2013. [Google Scholar]
- Filipiak-Kowszyk, D.; Janowski, A.; Kaminski, W.; Makowska, K.; Szulwic, J.; Wilde, K. The Geodetic Monitoring of the Engineering Structure—A Practical Solution of the Problem in 3D Space. Rep. Geod. Geoinform. 2016, 102, 1–14. [Google Scholar] [CrossRef]
- Holst, C.; Neuner, H.; Wieser, A.; Wunderlich, T.; Kuhlmann, H. Calibration of Terrestrial Laser Scanners. Allgem. Verm. Nachr. 2016, 123, 147–157. [Google Scholar]
- Lichti, D.; Chow, J.; Lahamy, H. Parameter de-correlation and model-identification in hybrid-style terrestrial laser scanner self-calibration. ISPRS J. Photogramm. 2011, 66, 317–326. [Google Scholar] [CrossRef]
- Lichti, D. Terrestrial laser scanner self-calibration: Correlation sources and their mitigation. ISPRS J. Photogramm. 2010, 65, 93–102. [Google Scholar] [CrossRef]
- Holst, C.; Kuhlmann, H. Aiming at self-calibration of terrestrial laser scanners using only one single object and one single scan. J. Appl. Geod. 2014, 8, 295–310. [Google Scholar] [CrossRef]
- Abbas, M.A.; Lichti, D.D.; Chong, A.K.; Setan, H.; Majid, Z.; Lau, C.L.; Idris, K.M.; Ariff, M.F.M. Improvements to the accuracy of prototype ship models measurement method using terrestrial laser scanner. Measurement 2017, 100, 301–310. [Google Scholar] [CrossRef]
- Muralikrishnan, B.; Ferrucci, M.; Sawyer, D.; Gerner, G.; Lee, V.; Blackburn, C.; Phillips, S.; Petrov, P.; Yakovlev, Y.; Astrelin, A.; et al. Volumetric performance evaluation of a laser scanner based on geometric error model. Precis. Eng. 2015, 40, 139–150. [Google Scholar] [CrossRef]
- Muralikrishnan, B.; Shilling, K.M.; Sawyer, D.S.; Rachakonda, P.K.; Lee, V.D.; Phillips, S.D.; Cheok, G.S.; Saidi, K.S. Laser scanner two-face errors on spherical targets. In Proceedings of the Annual Meeting of the ASPE 2014, Boston, MA, USA, 9–14 November 2014. [Google Scholar]
- Medić, T.; Holst, C.; Kuhlmann, H. Towards system calibration of panoramic laser scanners from a single station. Sensors 2017, 17, 1145. [Google Scholar] [CrossRef] [PubMed]
- Dutescu, E.; Heunecke, O.; Krack, K. Formbestimmung bei Radioteleskopen mittels Terrestrischem Laserscanning. Allgem. Verm. Nachr. 2009, 6, 239–245. [Google Scholar]
- Sarti, P.; Vittuari, L.; Abbondanza, C. Laser scanner and terrestrial surveying applied to gravitational deformation monitoring of large VLBI telescopes’ primary reflector. J. Surv. Eng. 2009, 135, 136–148. [Google Scholar] [CrossRef]
- Sarti, P.; Abbondanza, C.; Vittuari, L. Gravity-dependent signal path variation in a large VLBI telescope modelled with a combination of surveying methods. J. Geod. 2009, 83, 1115–1126. [Google Scholar] [CrossRef]
- Holst, C.; Zeimetz, P.; Nothnagel, A.; Schauerte, W.; Kuhlmann, H. Estimation of focal length variations of a 100-m radio telescope’s main reflector by laser scanner measurements. J. Surv. Eng. 2012, 138, 126–135. [Google Scholar] [CrossRef]
- Holst, C.; Nothnagel, A.; Blome, M.; Becker, P.; Eichborn, M.; Kuhlmann, H. Improved area-based deformation analysis of a radio telescope’s main reflector based on terrestrial laser scanning. J. Appl. Geod. 2015, 9, 1–13. [Google Scholar] [CrossRef]
- Holst, C.; Kuhlmann, H. Challenges and Present Fields of Action at Laser Scanner Based Deformation Analyses. J. Appl. Geod. 2016, 10, 17–25. [Google Scholar] [CrossRef]
- Johansson, L.E.; Olofsson, A.; Beck, E.D. OSO 20 m Telescope Handbook; Technical Report; Onsala Space Observatory: Onsala, Sweden, 2016. [Google Scholar]
- Clark, T.A.; Thomsen, P. Deformations in VLBI Antennas; Technical Report; Nasa Technical Memorandum 100696; NASA: Greenbelt, MD, USA, 1988.
- Sarti, P.; Abbondanza, C.; Petrov, L.; Negusini, M. Height bias and scale effect induced by antenna gravitational deformations in geodetic VLBI analysis. J. Geod. 2011, 85, 1–8. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Zámečniková, M.; Neuner, H. Untersuchung des gemeinsamen Einflusses des Auftreffwinkels und der Oberflächenrauheit auf die reflektorlose Distanzmesssung beim Scanning. In Ingenieurvermessung 17: Beiträge zum 18. Internationalen Ingenieurvermessungskurs; Wichmann: Berlin, Germany, 2017; pp. 63–76. [Google Scholar]
- Wujanz, D.; Burger, M.; Mettenleiter, M.; Neitzel, F. An intensity-based stochastic model for terrestrial laser scanners. ISPRS J. Photogram. 2017, 125, 146–155. [Google Scholar] [CrossRef]
- Lichti, D. Error modelling, calibration and analysis of an AM-CW terrestrial laser scanner system. ISPRS J. Photogramm. 2007, 61, 307–324. [Google Scholar] [CrossRef]
- Chow, J.; Lichti, D.; Glennie, C. Point-based versus plane-based self-calibration of static terrestrial laser scanners. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 121–126. [Google Scholar] [CrossRef]
- Chow, J.; Lichti, D.; Glennie, C.; Hartzell, P. Improvements to and comparison of static terrestrial lidar self-calibration methods. Sensors 2013, 13, 7224–7249. [Google Scholar] [CrossRef] [PubMed]
- Lichti, D.; Gordon, S.J.; Tipdecho, T. Error models and propagation in directly georeferenced terrestrial laser scanner networks. J. Surv. Eng. 2005, 131, 135–142. [Google Scholar] [CrossRef]
- Lichti, D. The impact of angle parameterisation on terrestrial laser scanner self-calibration. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 171–176. [Google Scholar]
- Zainuddin, K.; Setan, H.; Majid, Z. From laser point cloud to surface: data reduction procedure test. Geoinform. Sci. J. 2009, 9, 1–9. [Google Scholar]
- Lee, K.; Woo, H.; Suk, T. Data reduction methods for reverse engineering. Int. J. Adv. Manuf. Technol. 2001, 17, 735–743. [Google Scholar] [CrossRef]
- Lee, K.; Woo, H.; Suk, T. Point data reduction using 3D grids. Int. J. Adv. Manuf. Technol. 2001, 18, 201–210. [Google Scholar] [CrossRef]
- Holst, C.; Artz, T.; Kuhlmann, H. Biased and unbiased estimates based on laser scans of surfaces with unknown deformations. J. Appl. Geod. 2014, 8, 169–183. [Google Scholar] [CrossRef]
- Roscher, R. Sequential Learning Using Incremental Import Vector Machines for Semantic Segmentation. Ph.D. Thesis, German Geodetic Commission (DGK), Munich, Germany, 2013. [Google Scholar]
- Weiss, U.; Biber, P. Plant detection and mapping for agricultural robots using a 3D lidar sensor. Robot. Auton. Syst. 2011, 5, 265–273. [Google Scholar] [CrossRef]
- Leica Geosystems. Leica ScanStation P20, Industry’s Best Performing Ultra-High Speed Scanner. Available online: www.leica-geosystems.de (accessed on 8 August 2017).
- Jurek, T.; Kuhlmann, H.; Holst, C. Impact of spatial correlations on the surface estimation based on terrestrial laser scanning. J. Appl. Geod. 2017. [Google Scholar] [CrossRef]
- Kauker, S.; Schwieger, V. A synthetic covariance matrix for monitoring by terrestrial laser scanning. J. Appl. Geod. 2017, 11, 77–87. [Google Scholar] [CrossRef]
- Mikhail, E.; Ackermann, F. Observations and Least Squares; Dun-Donelly: New York, NY, USA, 1976. [Google Scholar]
- Wolf, H. Ausgleichungsrechnung. Formeln zur Praktischen Anwendung; Dümmler: Bonn, Germany, 1975. [Google Scholar]
- Neitzel, F. Generalization of total least-squares on example of unweighted and weighted 2D similarity transformation. J. Geod. 2010, 84, 751–762. [Google Scholar] [CrossRef]
- Nothnagel, A.; Holst, C.; Schunck, D.; Haas, R.; Wennerbäck, L.; Olofsson, H.; Hammargren, R. Paraboloid deformation investigations of the Onsala 20 m radio telescope with terrestrial laser scanning. In Proceedings of the 23rd Meeting of the European VLBI Group for Geodesy and Astronomy, Gothenburg, Sweden, 15–19 May 2017. [Google Scholar]
- Heunecke, O.; Kuhlmann, H.; Welsch, W.; Eichhorn, A.; Neuner, H. Hanbuch Ingenieurgeodäsie. Auswertung Geodätischer Überwachungsmessungen, 2nd ed.; Wichmann: Heidelberg, Germany, 2013. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | (mm) | (mm) | (”) | (”) | (mm) | (”) | (”) |
|---|---|---|---|---|---|---|---|
| 92.6 | 5.3 | 17.1 | 10.5 | ||||
| 0.02 | 0.02 | 0.39 | 0.20 | 0.04 | 0.09 | 0.78 |
| Elevation Angle | (m) | (m) | (m) | () | () | (m) | (mm) | (mm) |
|---|---|---|---|---|---|---|---|---|
| 85 | 7.0804 | 182.8879 | 5.4603 | 8.9910 | 0.05 | – | ||
| 75 | 7.0976 | 186.5480 | 15.3586 | 8.9889 | 0.05 | |||
| 60 | 7.1434 | 192.0874 | 30.4292 | 8.9900 | 0.05 | |||
| 45 | 7.2152 | 201.7932 | 44.0489 | 8.9879 | 0.03 | |||
| 30 | 7.2994 | 214.2344 | 55.3794 | 8.9856 | 0.03 | |||
| 15 | 7.4017 | 239.2063 | 63.6801 | 8.9837 | 0.03 | |||
| 5 | 7.4709 | 260.8560 | 65.5353 | 8.9814 | 0.03 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Holst, C.; Schunck, D.; Nothnagel, A.; Haas, R.; Wennerbäck, L.; Olofsson, H.; Hammargren, R.; Kuhlmann, H. Terrestrial Laser Scanner Two-Face Measurements for Analyzing the Elevation-Dependent Deformation of the Onsala Space Observatory 20-m Radio Telescope’s Main Reflector in a Bundle Adjustment. Sensors 2017, 17, 1833. https://doi.org/10.3390/s17081833
Holst C, Schunck D, Nothnagel A, Haas R, Wennerbäck L, Olofsson H, Hammargren R, Kuhlmann H. Terrestrial Laser Scanner Two-Face Measurements for Analyzing the Elevation-Dependent Deformation of the Onsala Space Observatory 20-m Radio Telescope’s Main Reflector in a Bundle Adjustment. Sensors. 2017; 17(8):1833. https://doi.org/10.3390/s17081833
Chicago/Turabian StyleHolst, Christoph, David Schunck, Axel Nothnagel, Rüdiger Haas, Lars Wennerbäck, Henrik Olofsson, Roger Hammargren, and Heiner Kuhlmann. 2017. "Terrestrial Laser Scanner Two-Face Measurements for Analyzing the Elevation-Dependent Deformation of the Onsala Space Observatory 20-m Radio Telescope’s Main Reflector in a Bundle Adjustment" Sensors 17, no. 8: 1833. https://doi.org/10.3390/s17081833
APA StyleHolst, C., Schunck, D., Nothnagel, A., Haas, R., Wennerbäck, L., Olofsson, H., Hammargren, R., & Kuhlmann, H. (2017). Terrestrial Laser Scanner Two-Face Measurements for Analyzing the Elevation-Dependent Deformation of the Onsala Space Observatory 20-m Radio Telescope’s Main Reflector in a Bundle Adjustment. Sensors, 17(8), 1833. https://doi.org/10.3390/s17081833