An Acquisition Scheme Based on a Matched Filter for Novel Communication and Navigation Fusion Signals


Abstract
:1. Introduction
2. Signal Model and Acquisition Method
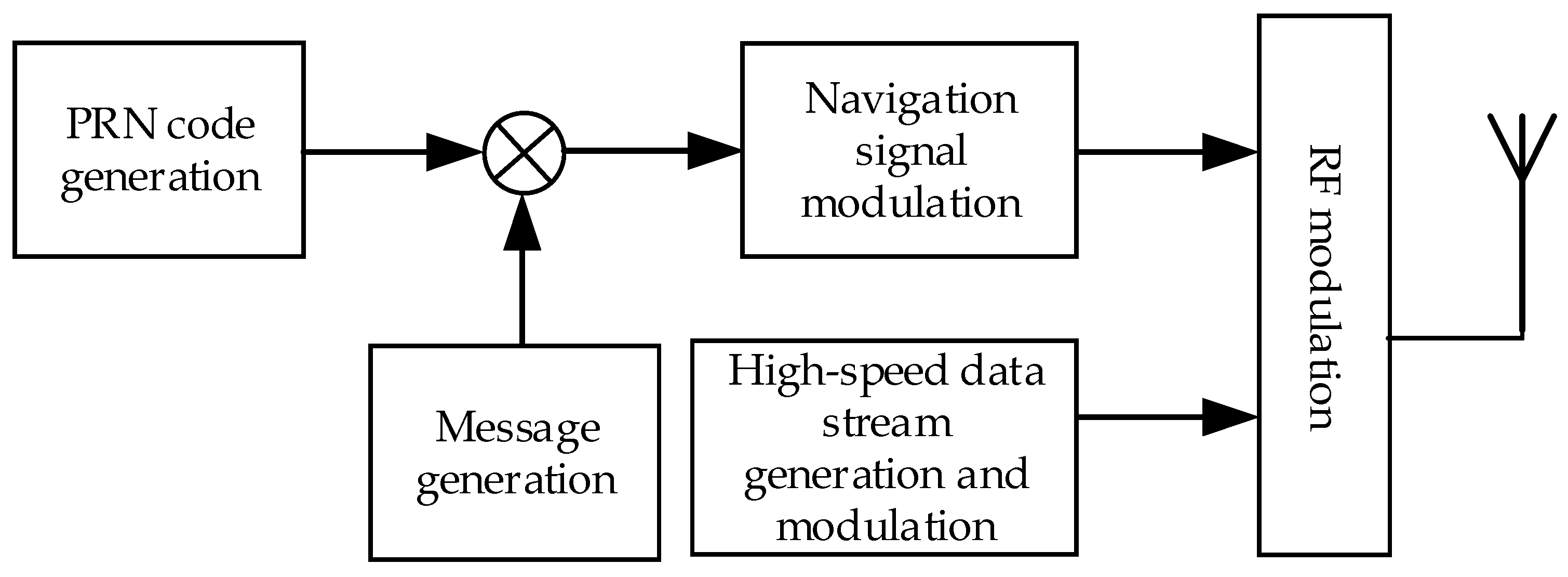
2.1. Comnunication and Navigation Fusion Signal
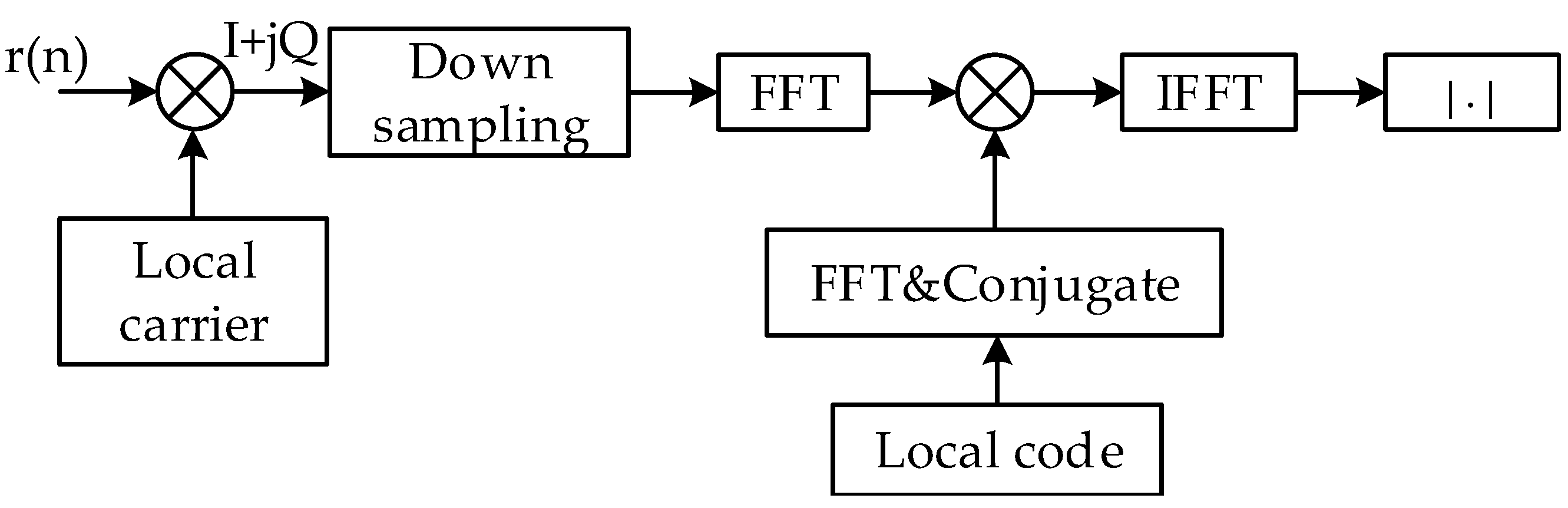
2.2. Acquisition Method
3. Matched Filter Acquisition Algorithm with Double Detection (MFADD)
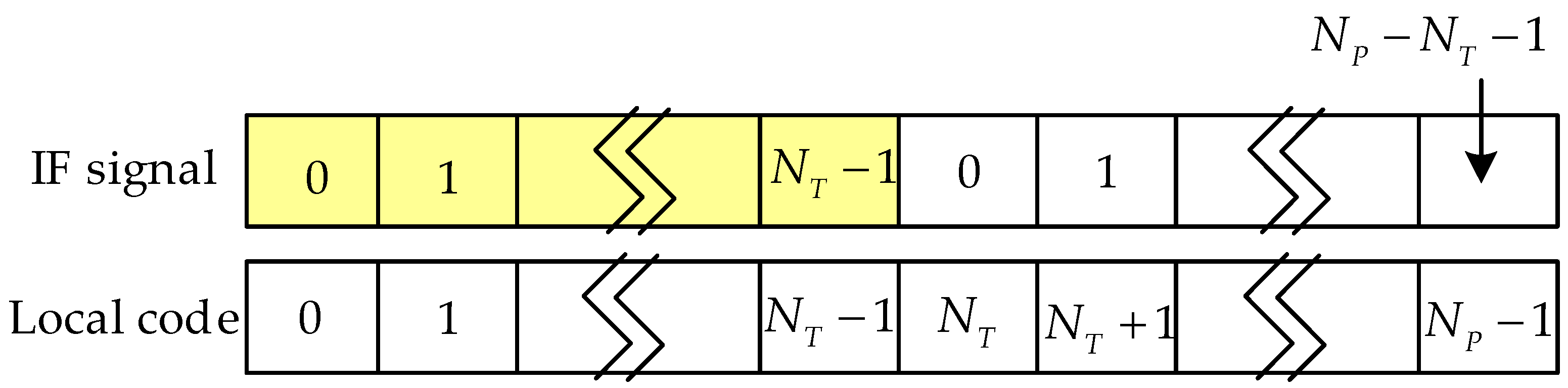
3.1. Reference Code Phase of the Presence MDBBS
3.2. Detection by Comparison
4. Performance Assessment
4.1. Simulations
4.2. Real Data Tests
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, R.; Chen, W.; Xu, Y.; Ji, S.Y. A New Indoor Positioning System Architecture Using GPS Signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [PubMed]
- Bullock, J.B.; Chowdhary, M.; Rubin, D.; Leimer, D.; Turetzky, G.; Jarvis, M. Continuous Indoor Positioning Using GNSS, Wi-Fi, and MEMS Dead Reckoning. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2408–2416. [Google Scholar]
- Deng, Z.L.; Yu, Y.P.; Yuan, X.; Wan, N.; Yang, L. Situation and Development Tendency of Indoor Positioning. China Commun. 2013, 10, 42–55. [Google Scholar] [CrossRef]
- Mazuelas, S.; Lago, F.A.; Blas, J.; Bahillo, A. Prior NLOS Measurement Correction for Positioning in Cellular Wireless Networks. IEEE Trans. Veh. Technol. 2009, 58, 2585–2591. [Google Scholar] [CrossRef]
- Chen, C.Y.; Wu, W.R. Three-Dimensional Positioning for LTE Systems. IEEE Trans. Veh. Technol. 2017, 66, 3220–3234. [Google Scholar] [CrossRef]
- The State Administration of Radio, Film, and Television of China. The Industry Standard of Radio, Film, and Television. GY/T 220.7-2008. Mobile Multimedia BroadcastingPart 7: Technical Specifications for Receiving and Decoding Terminal; The State Administration of Radio, Film, and Television of China: Beijing, China, 2008.
- Huang, J.-M.; Shi, Z.Y.; Zheng, B. Analysis of the statistic characteristics of the truncated balance Gold code. Xi Tong Gong Cheng Yu Dian Zi Ji Shu/Syst. Eng. Electron. 2006, 28, 646–649. [Google Scholar]
- Baldi, M.; Chiaraluce, F.; Boujnah, N.; Garello, R. On the Autocorrelation Properties of Truncated Maximum-Length Sequences and Their Effect on the Power Spectrum. IEEE Trans. Signal Process. 2010, 58, 6284–6297. [Google Scholar] [CrossRef]
- Banerjee, P.; Keshwala, U.; Kaushik, M. Study on potentiality of truncated PRN sequences for communication. In Proceedings of the International Conference on Communications, Devices and Intelligent Systems, Kolkata, India, 28–29 December 2012; pp. 409–412. [Google Scholar]
- Turunen, S. Acquisition of satellite navigation signals using dynamically chosen measurements. IET Radar Sonar Navig. 2010, 4, 49–61. [Google Scholar] [CrossRef]
- Wu, P.; He, C.; Zong, Z.-L. A novel correlation architecture of acquisition for GNSS satellite navigation system receiver based on CORDIC algorithm. In Proceedings of the 2010 International Conference on Computational Problem-Solving, Lijiang, China, 3–5 December 2010; pp. 115–121. [Google Scholar]
- Lo Presti, L.; Zhu, X.F.; Fantino, M.; Mulassano, P. GNSS signal acquisition in the presence of sign transition. IEEE J. Sel. Top. Signal Process. 2009, 3, 557–570. [Google Scholar] [CrossRef]
- Kong, S.H. A Deterministic Compressed GNSS Acquisition Technique. IEEE Trans. Veh. Technol. 2013, 62, 511–521. [Google Scholar] [CrossRef]
- Lin, T.; Ma, M.; Broumandan, A.; Lachapelle, G. Demonstration of a high sensitivity GNSS software receiver for indoor positioning. Adv. Space Res. 2013, 51, 1035–1045. [Google Scholar] [CrossRef]
- Foucras, M.; Ekambi, B.; Bacard, F.; Julien, O.; Macabiau, C. Optimal GNSS acquisition parameters when considering bit transitions. In Proceedings of the ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 804–817. [Google Scholar]
- Kim, B.; Kong, S.H. Design of FFT-Based TDCC for GNSS Acquisition. IEEE Trans. Wirel. Commun. 2014, 13, 2798–2808. [Google Scholar]
- Tamazin, M.; Noureldin, A.; Korenberg, M.J.; Massoud, A. Navigation and Instrumentation Research Group. Robust fine acquisition algorithm for GPS receiver with limited resources. GPS Solut. 2016, 20, 77–88. [Google Scholar] [CrossRef]
- Borio, D.; Akos, D. Noncoherent Integrations for GNSS Detection: Analysis and Comparisons. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 360–375. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, A.M.; Ding, J.C.; Wang, J. BeiDou Signal Acquisition with Neumann-Hoffman Code Modulation in a Degraded Channel. Sensors 2017, 17, 323. [Google Scholar] [CrossRef] [PubMed]
- The State Administration of Radio, Film, and Television of China. The Industry Standard of Radio, Film, and Television. GY/T220.1-2006. Mobile Multimedia Broadcasting Part 1: Framing Structure, Channel Coding and Modulation for Broadcasting Channel; The State Administration of Radio, Film, and Television of China: Beijing, China, 2006.
- Zhu, C.; Fan, X.N. A Novel Method to Extend Coherent Integration for Weak GPS Signal Acquisition. IEEE Commun. Lett. 2015, 19, 1343–1346. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| slot time, | 25 ms |
| PRN sequence length, | 8191 chips |
| TPRN sequence length, | 2135 chips |
| code rate | 5 MHz |
| Sampling frequency, | 22 MHz |
| Intermediate frequency, | 0 MHz |
| Residual carrier frequency, | 1 kHz |
| Signal length | 20 slot times |
| Data bit transition | Random |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Mo, J.; Jia, B.; Bian, X. An Acquisition Scheme Based on a Matched Filter for Novel Communication and Navigation Fusion Signals. Sensors 2017, 17, 1766. https://doi.org/10.3390/s17081766
Deng Z, Mo J, Jia B, Bian X. An Acquisition Scheme Based on a Matched Filter for Novel Communication and Navigation Fusion Signals. Sensors. 2017; 17(8):1766. https://doi.org/10.3390/s17081766
Chicago/Turabian StyleDeng, Zhongliang, Jun Mo, Buyun Jia, and Xinmei Bian. 2017. "An Acquisition Scheme Based on a Matched Filter for Novel Communication and Navigation Fusion Signals" Sensors 17, no. 8: 1766. https://doi.org/10.3390/s17081766
APA StyleDeng, Z., Mo, J., Jia, B., & Bian, X. (2017). An Acquisition Scheme Based on a Matched Filter for Novel Communication and Navigation Fusion Signals. Sensors, 17(8), 1766. https://doi.org/10.3390/s17081766