Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments


Abstract
:1. Introduction
2. Related Work
2.1. Dynamic Radio Map
2.2. Multi-Floor Indoor Positioning
2.3. People Presence Effect
2.4. MD Heterogeneity
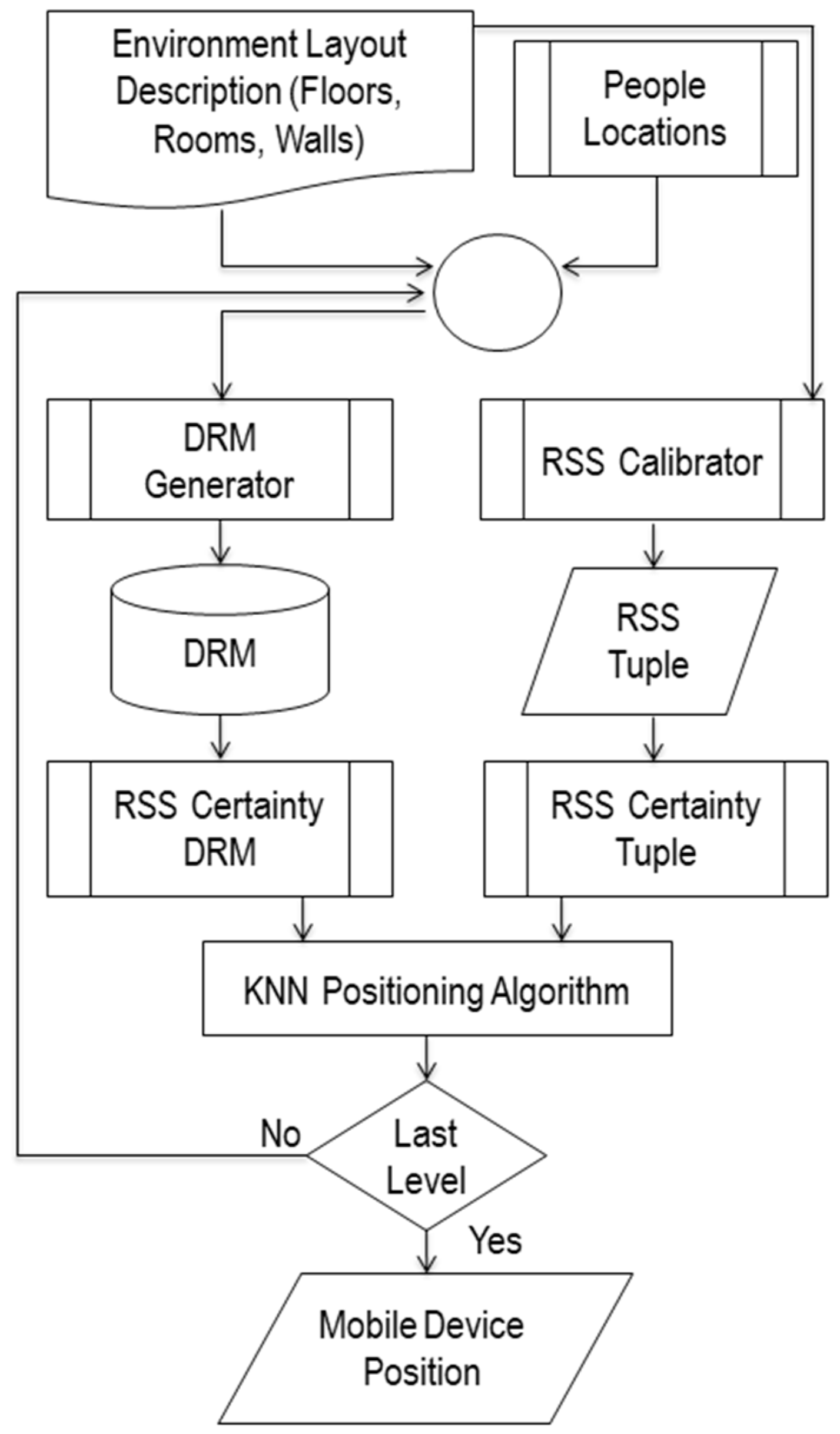
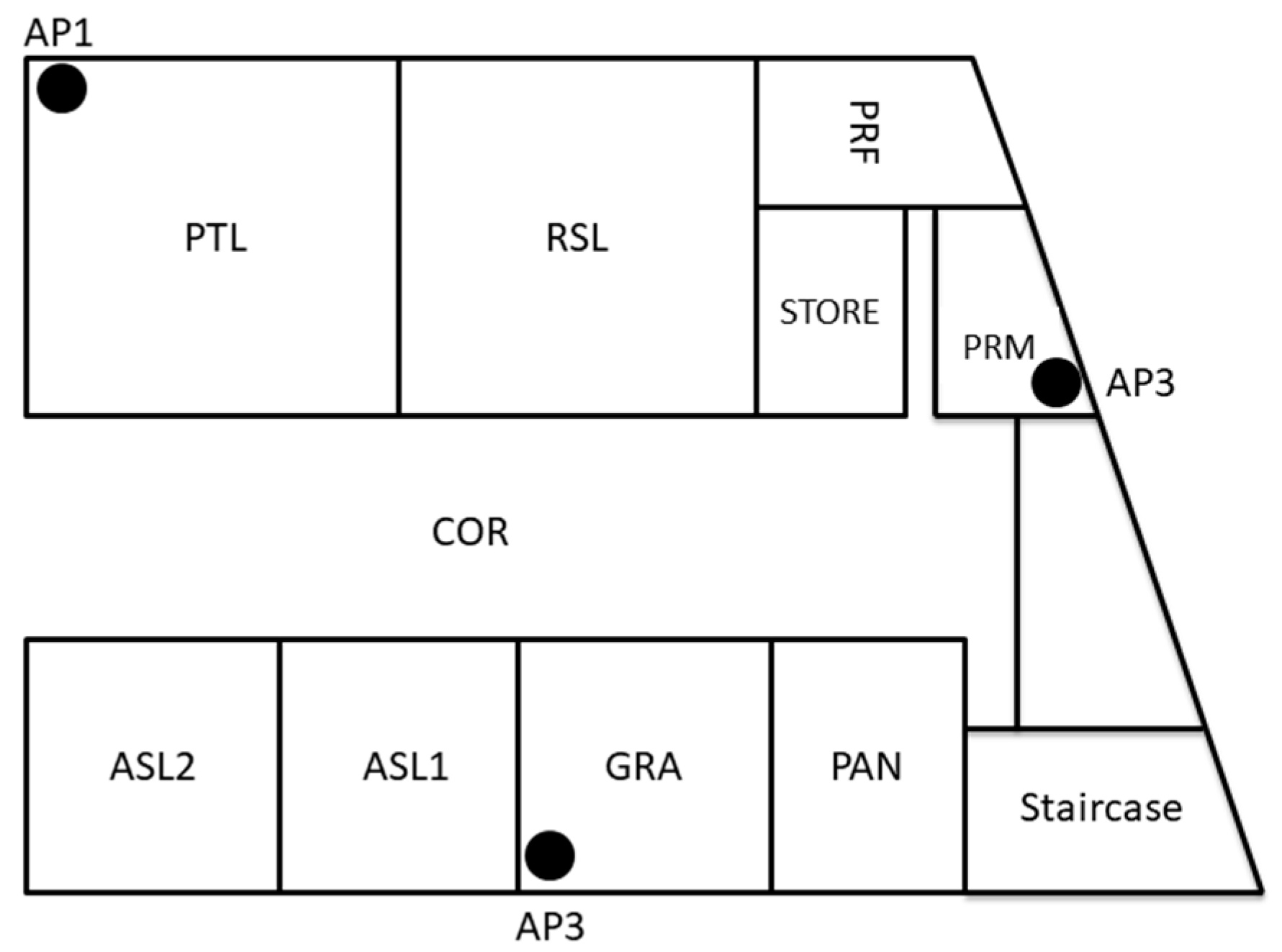
3. Methodology
| Algorithm 1: Floor Dynamic Radio Map (FDRM) Generation | |
| Input: | |
| Output: | |
| 1: | |
| 2: | |
| 3: | |
| 4: | |
| 5: | |
| 6: | |
| 7: | |
| 8: | |
| 9: | |
| 10: | |
| 11: | |
| 12: | |
| 13: | |
| 14: | |
| 15: | |
| 16: | |
| 17: | |
| 18: | |
| 19: | |
| 20: | |
3.1. Dynamic Radio Map Generation (DRGM)
3.1.1. Manual Radio Map Calibration
3.1.2. Positioning Algorithm Adoption
3.1.3. DRM Generation for Multi-Floor Environments
3.2. Received Signal Strength Certainty (RSC)
3.2.1. MD Heterogeneity Effect of RSS
3.2.2. Theoretical RSS Presentation
3.2.3. Practical Validation of the RSC Effect
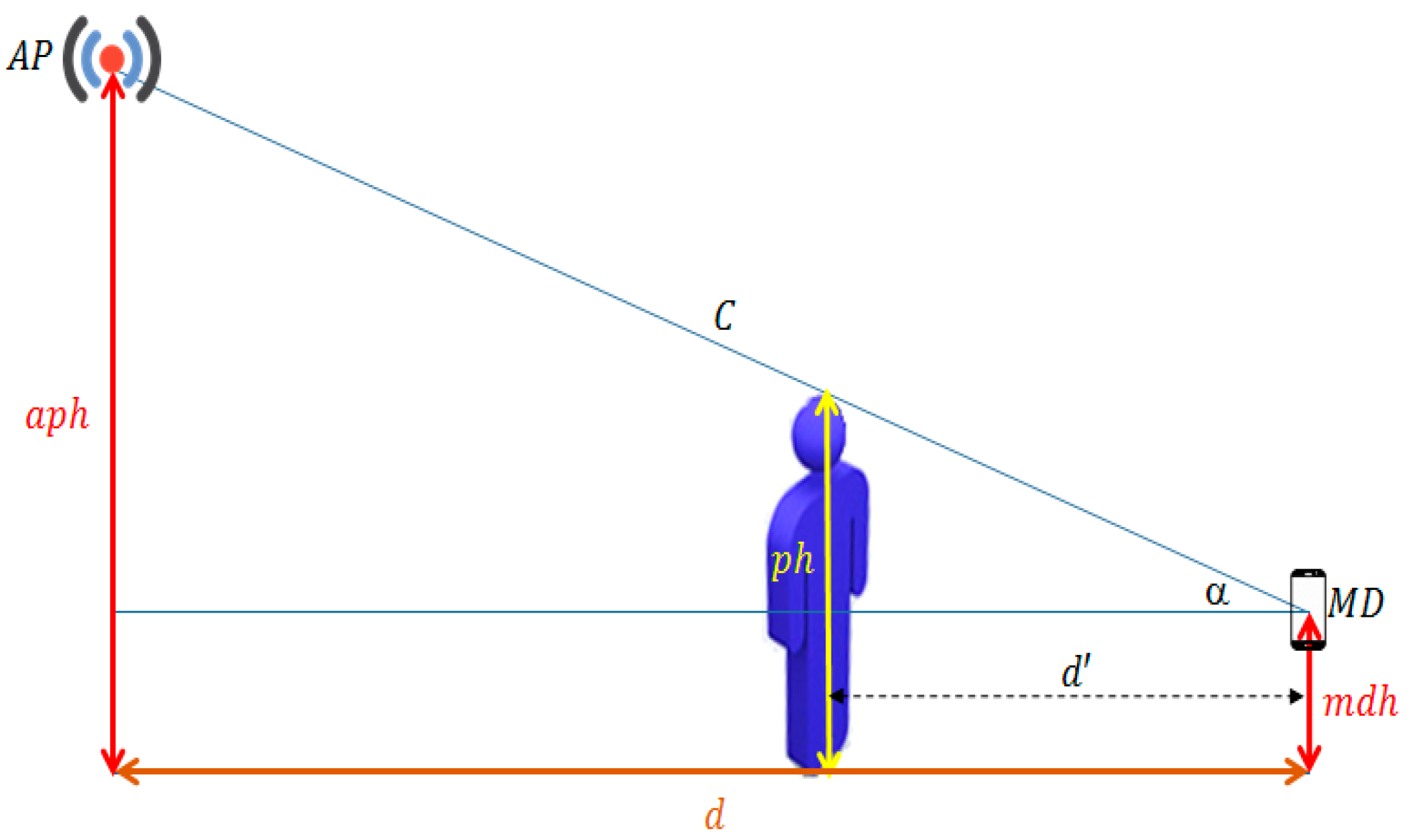
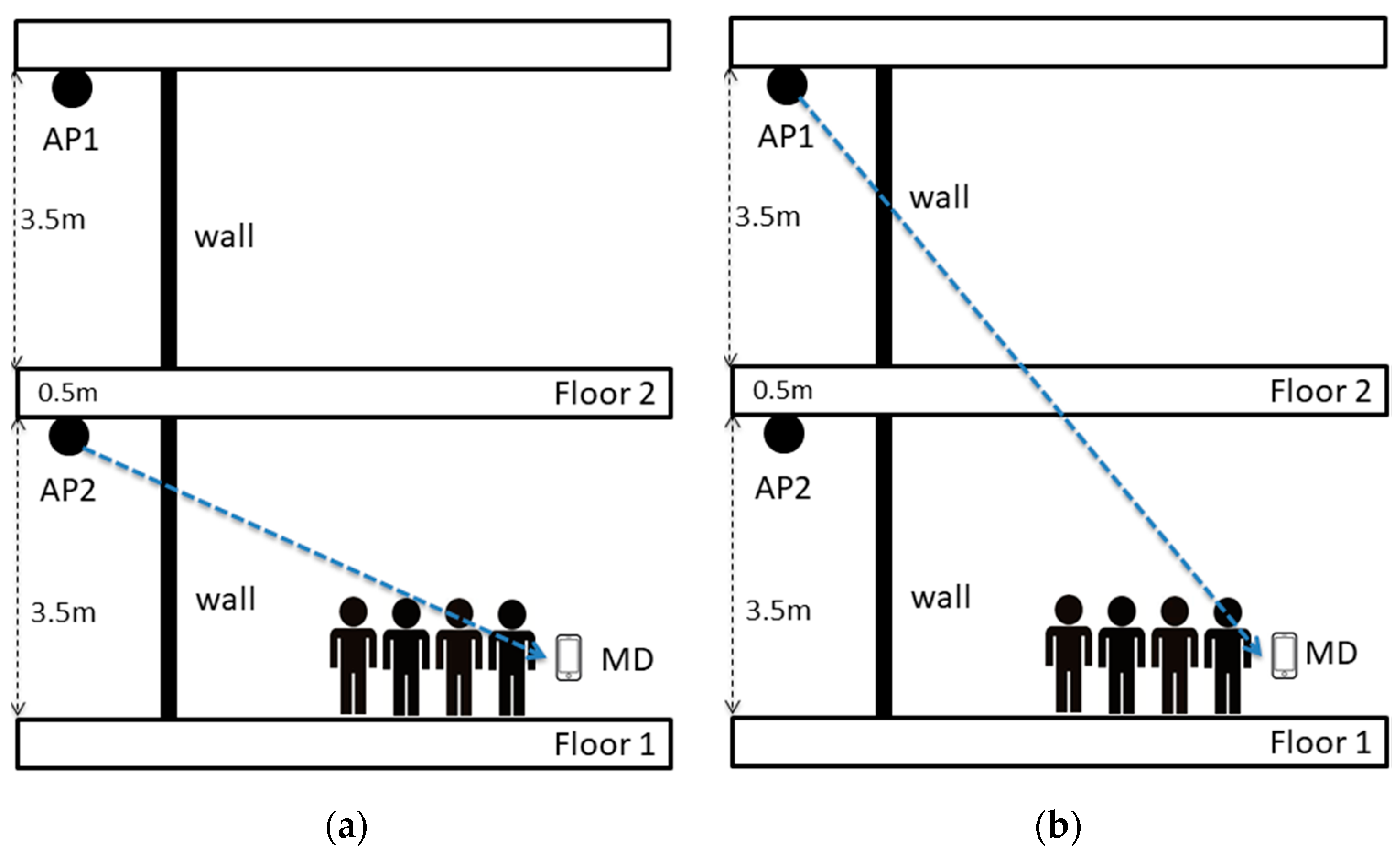
3.3. People Presence Effect
3.3.1. People Allocation Psychology
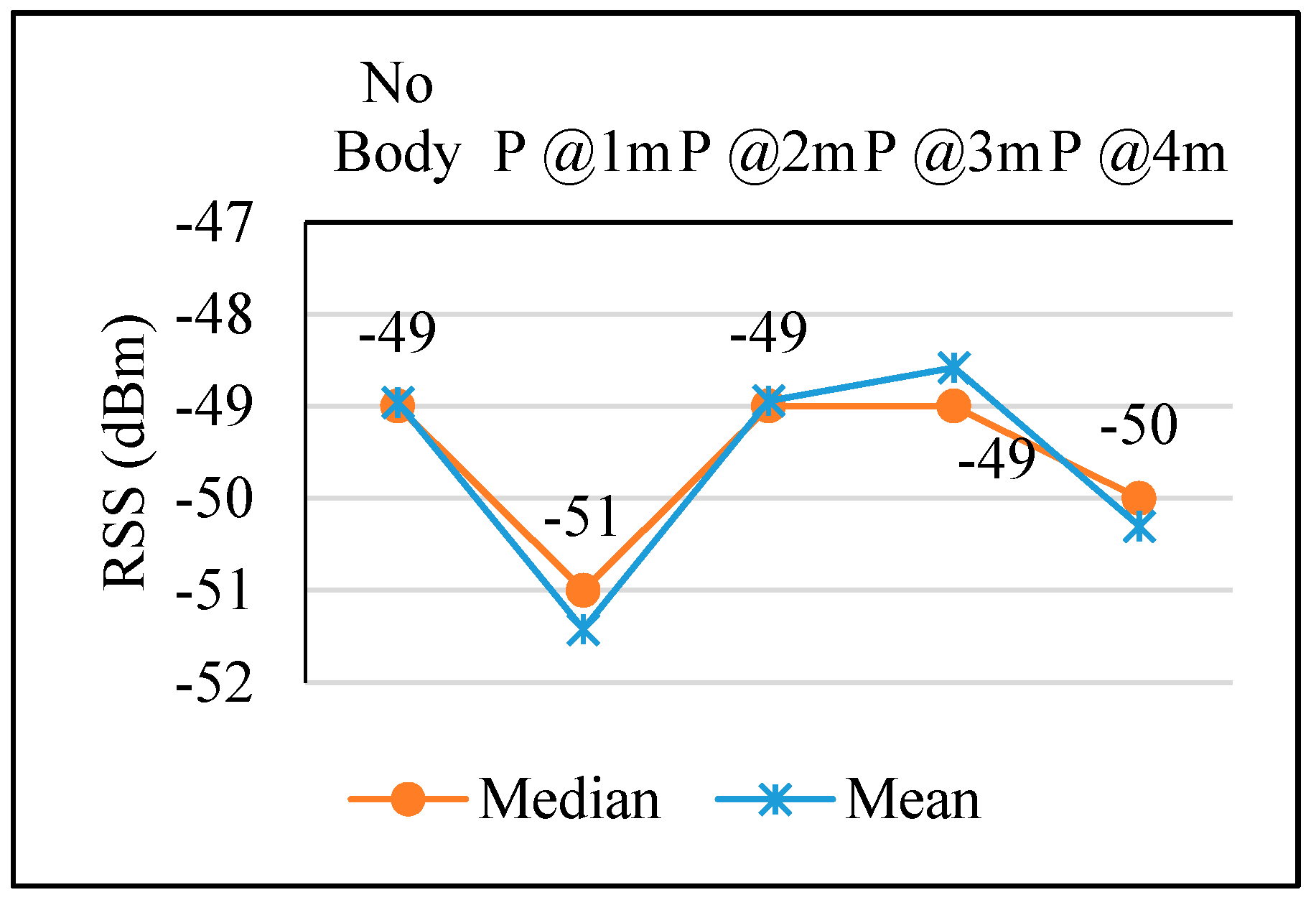
3.3.2. PPE in Horizontal LOS
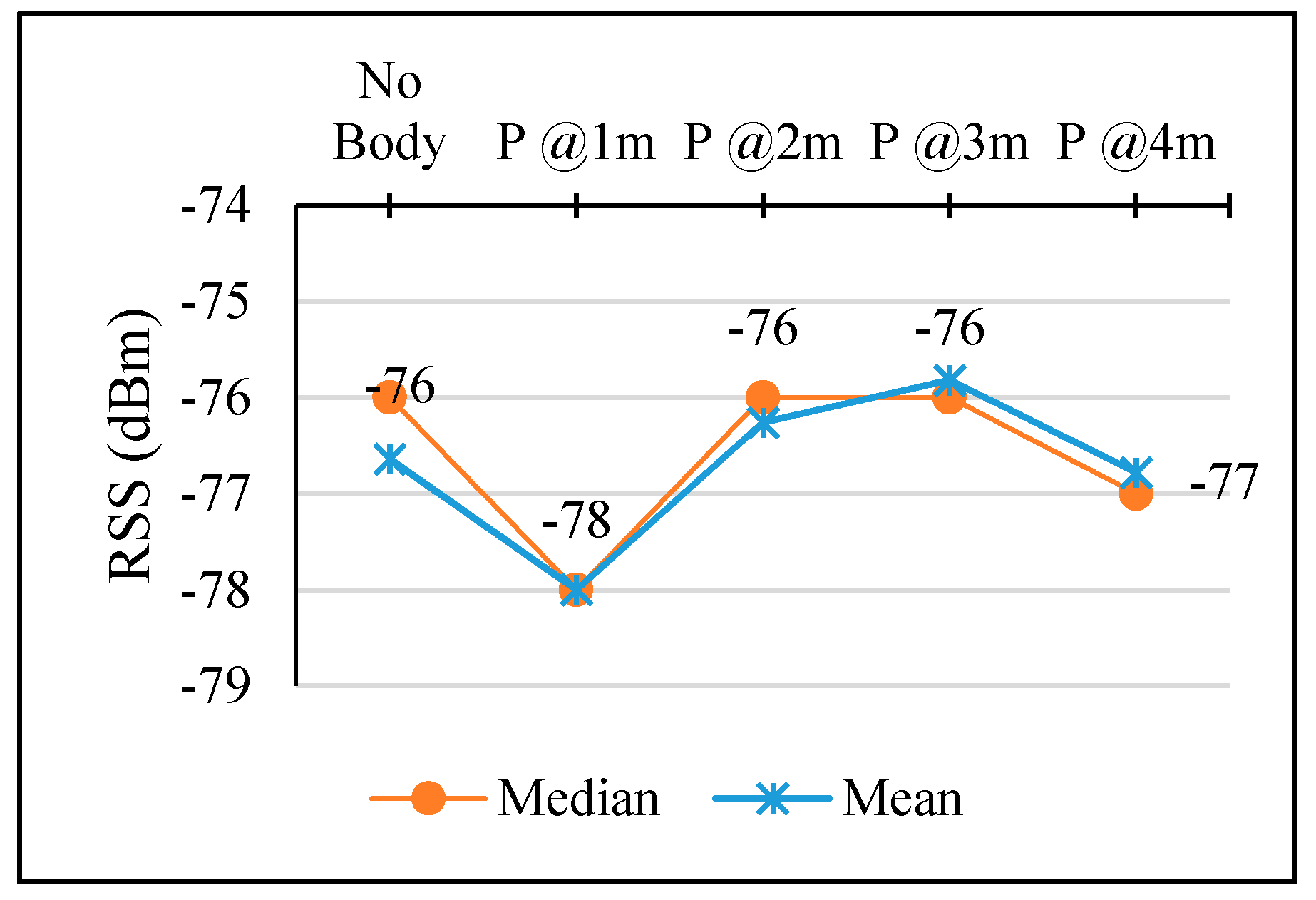
3.3.3. PPE in Diagonal LOS
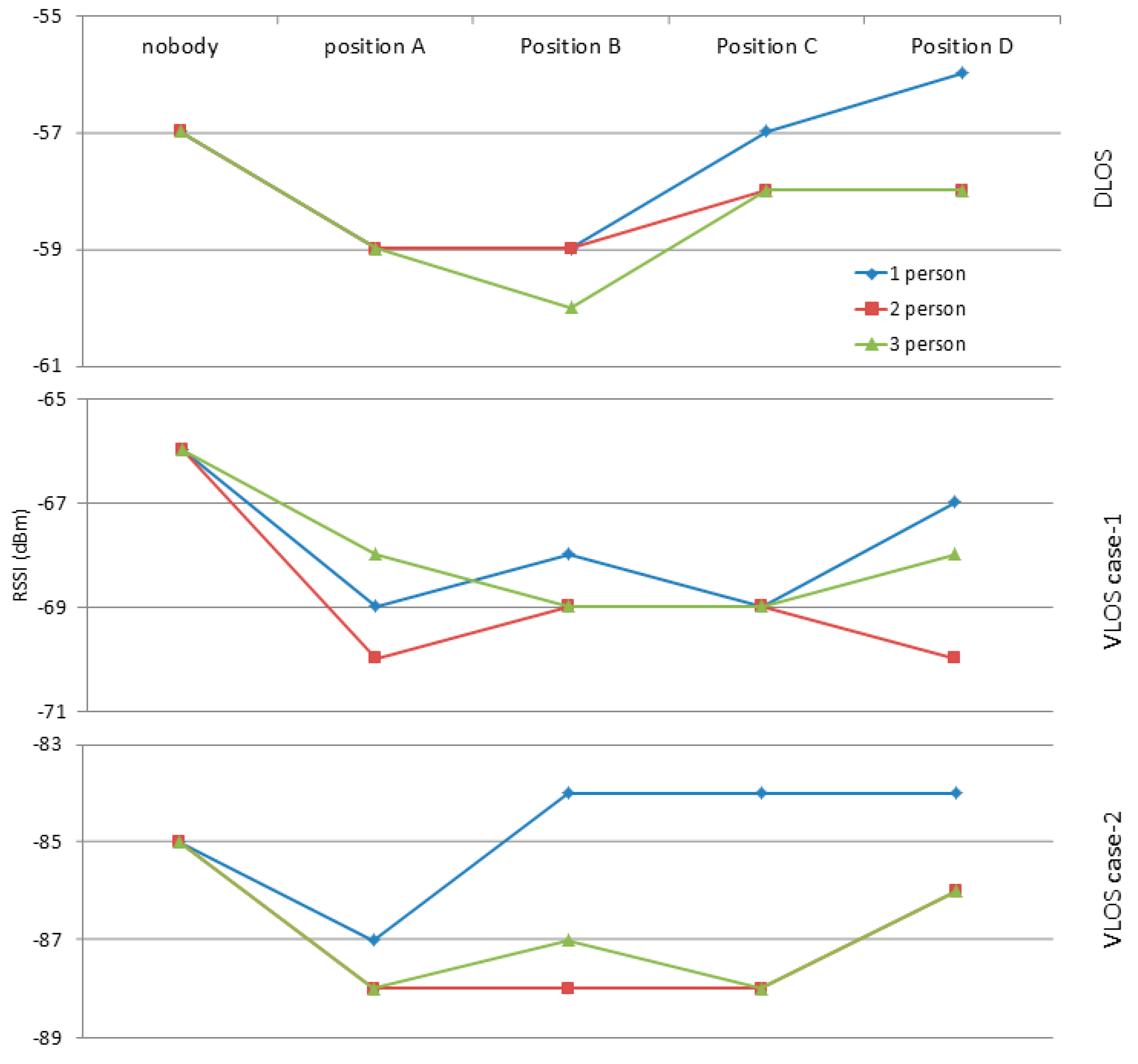
3.3.4. PPE in Virtual LOS
3.3.5. Defining PPE Influence Distance (PPID)
3.3.6. Integrating PPE into DRMG
4. Results and Discussion
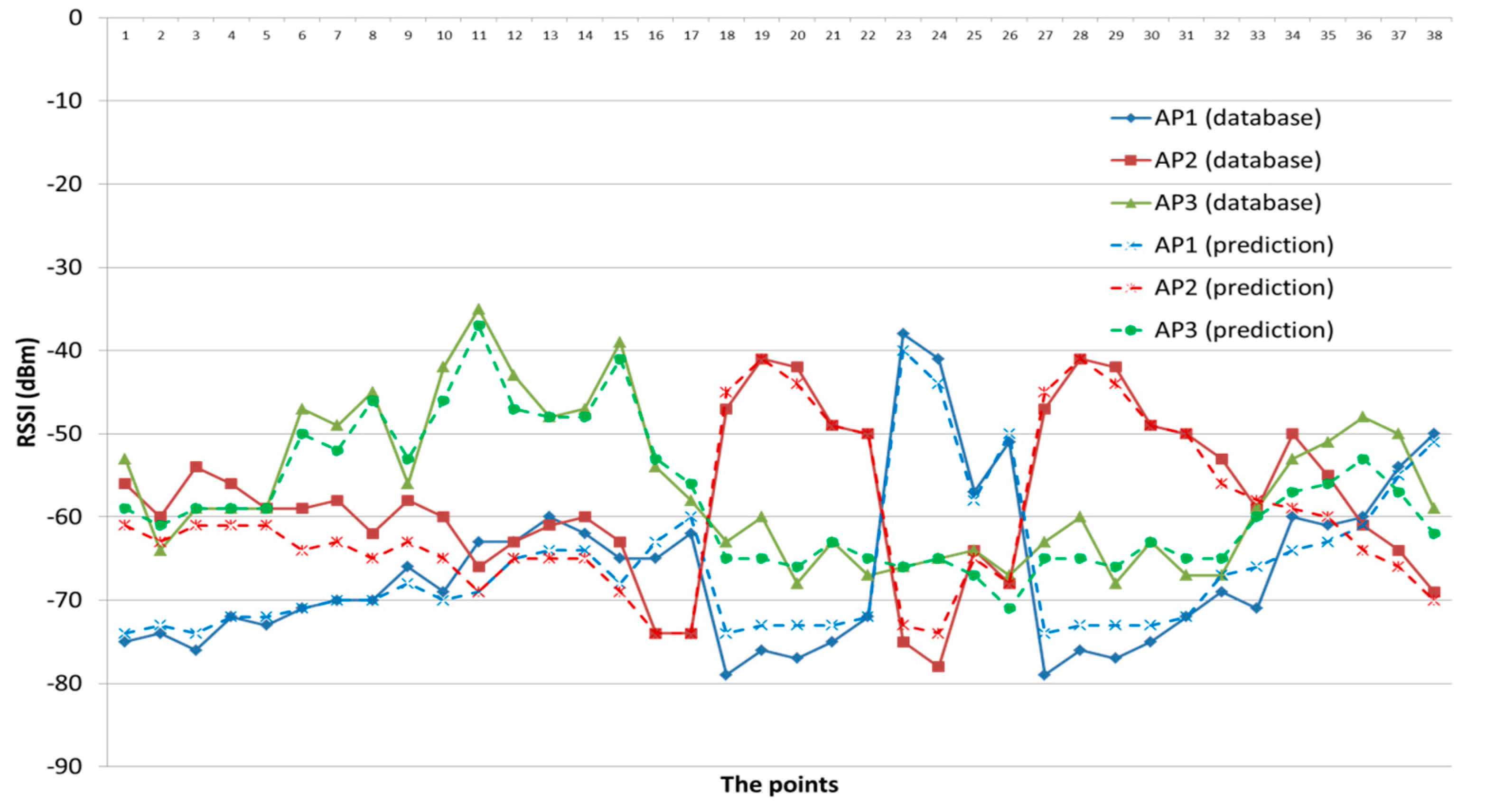
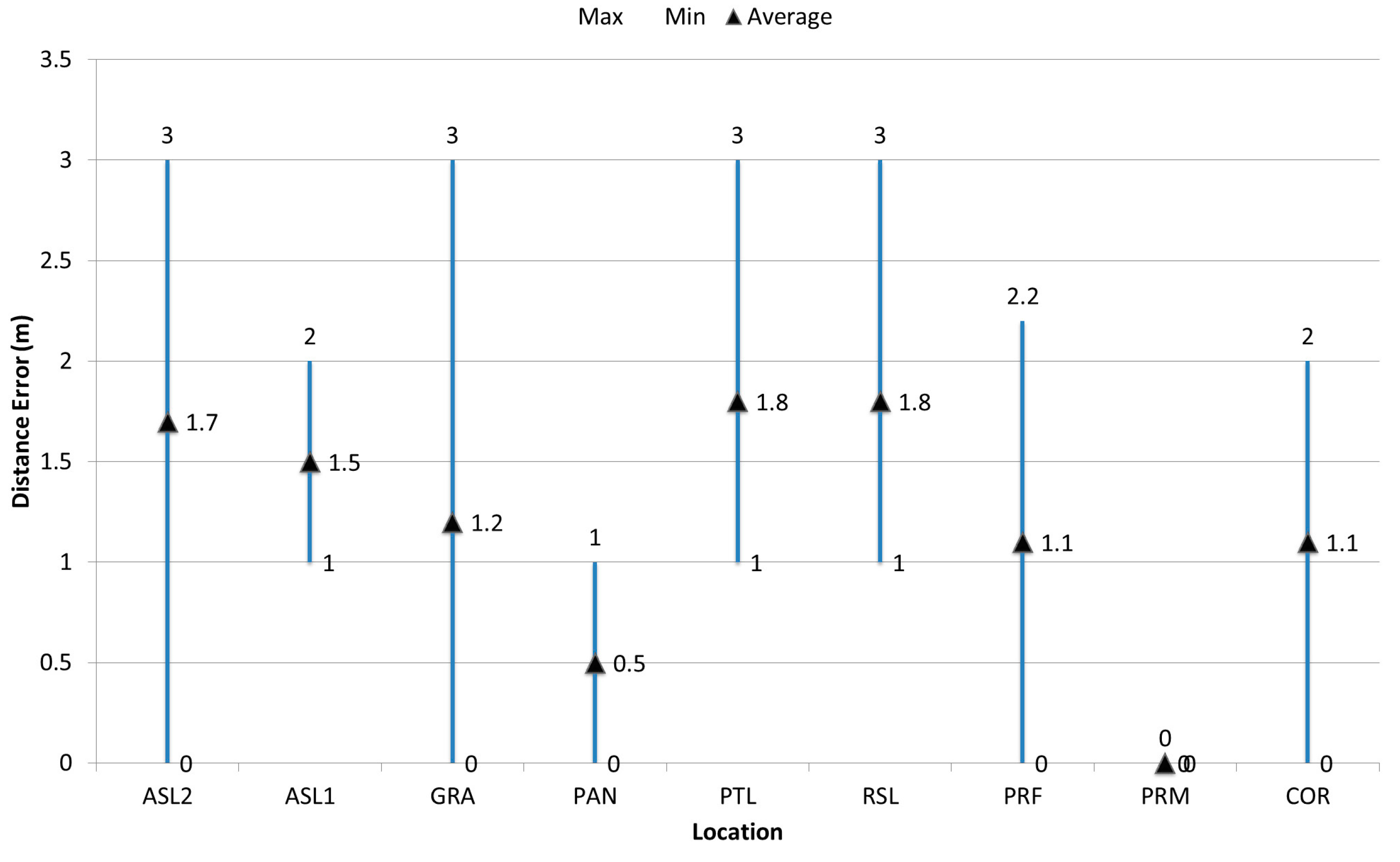
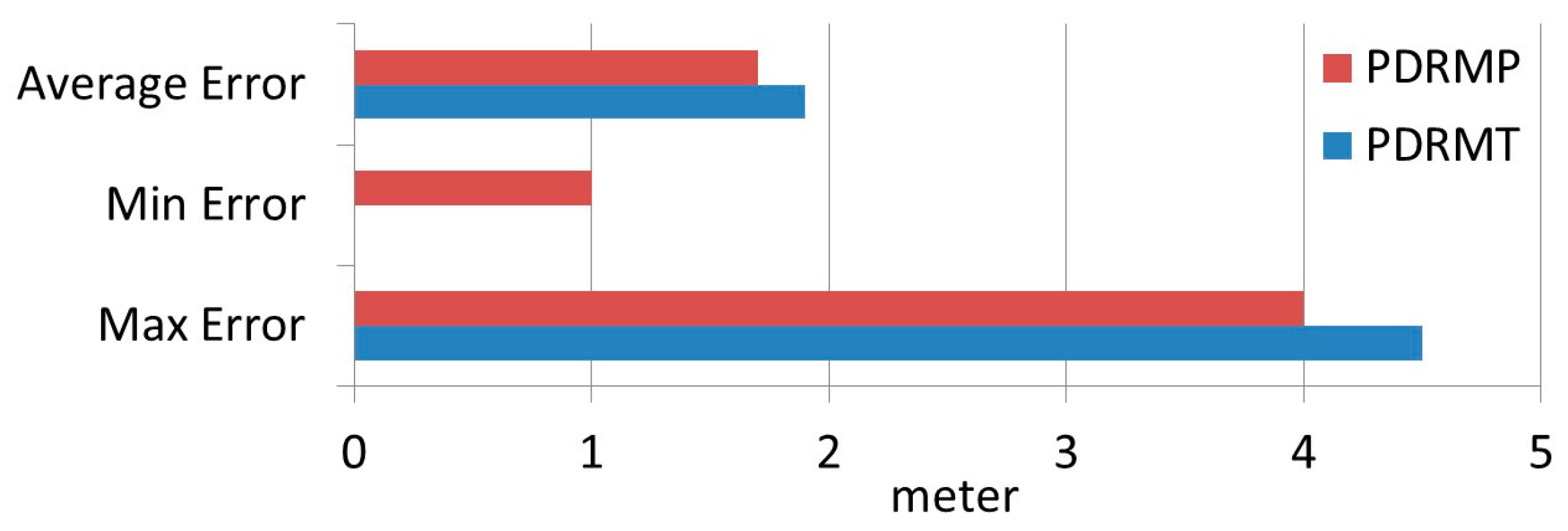
4.1. Performance of Dynamic Radio Map Generation
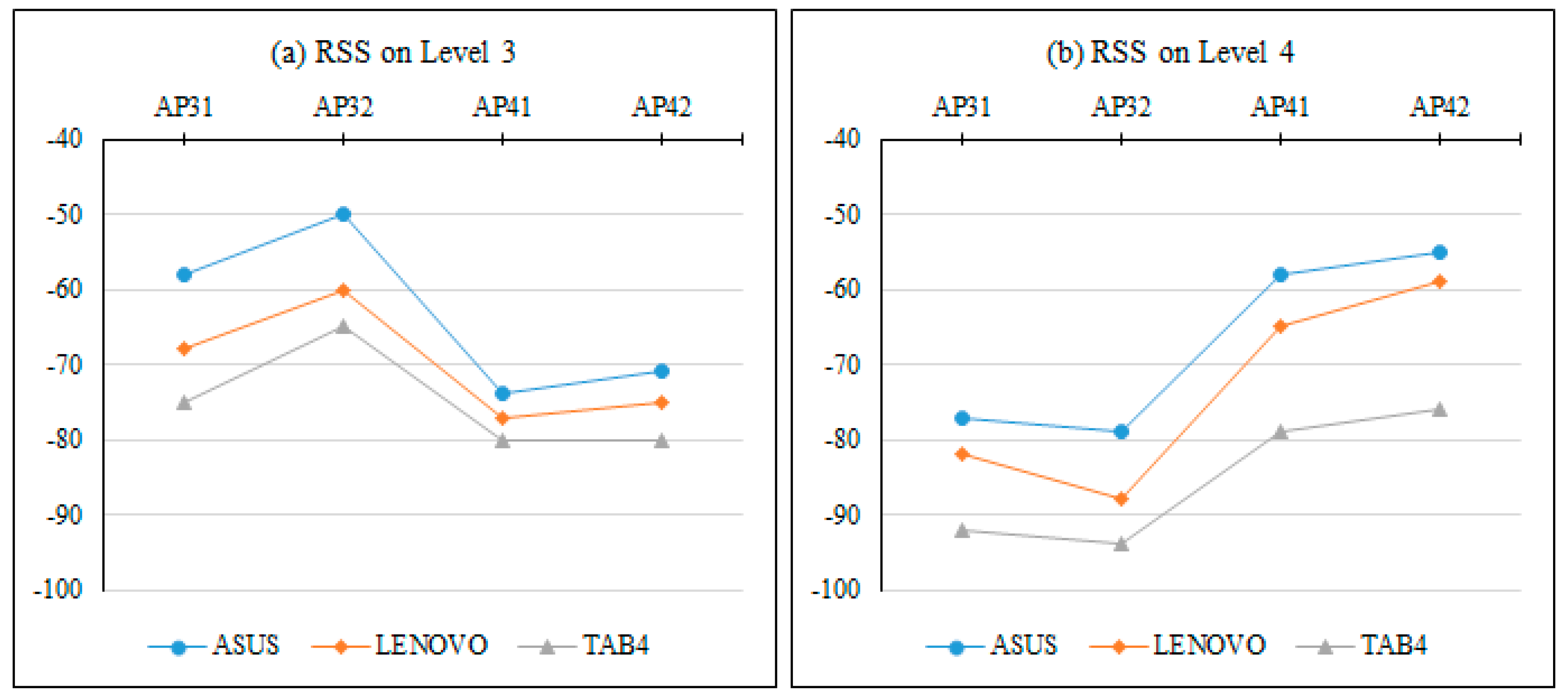
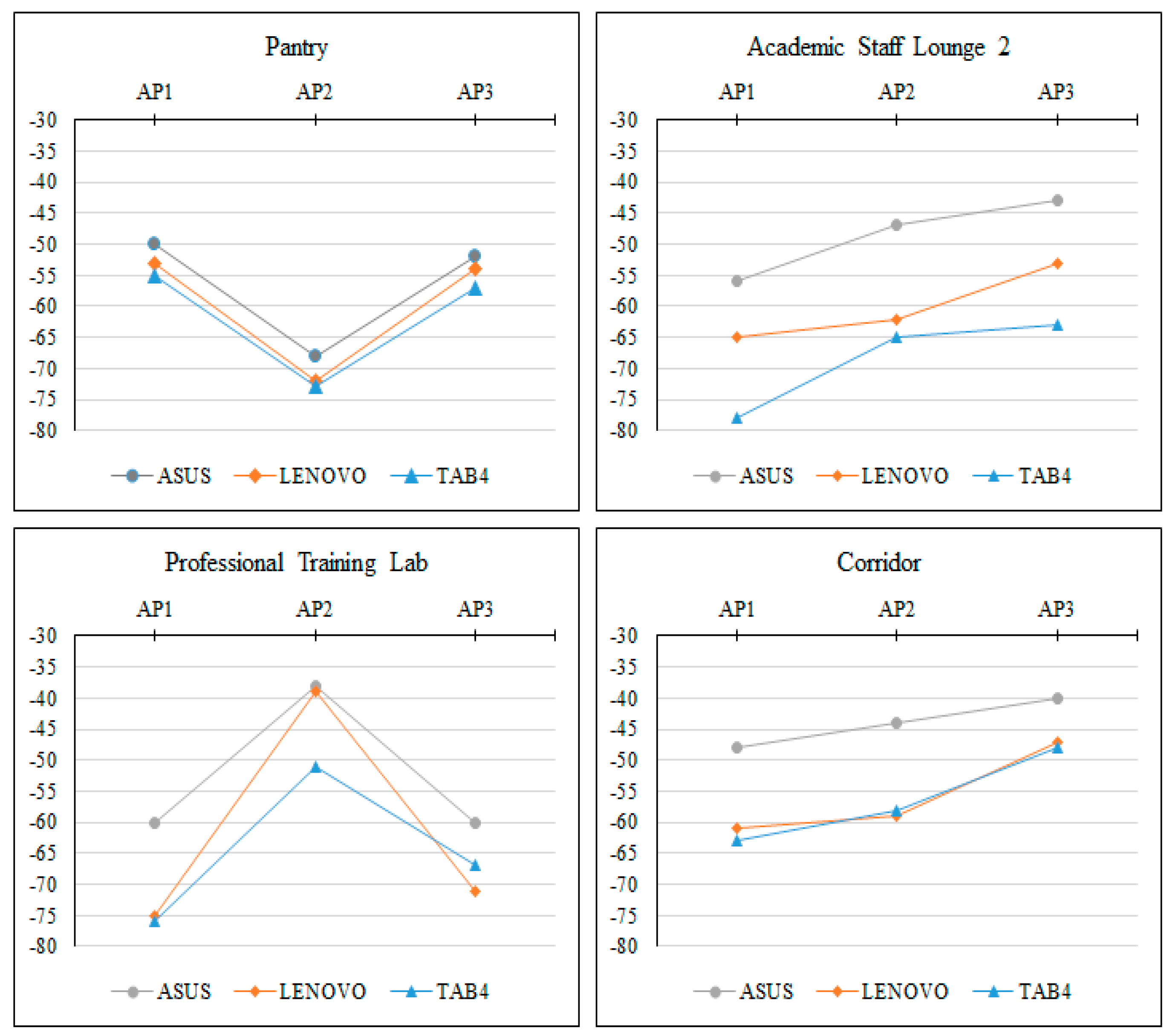
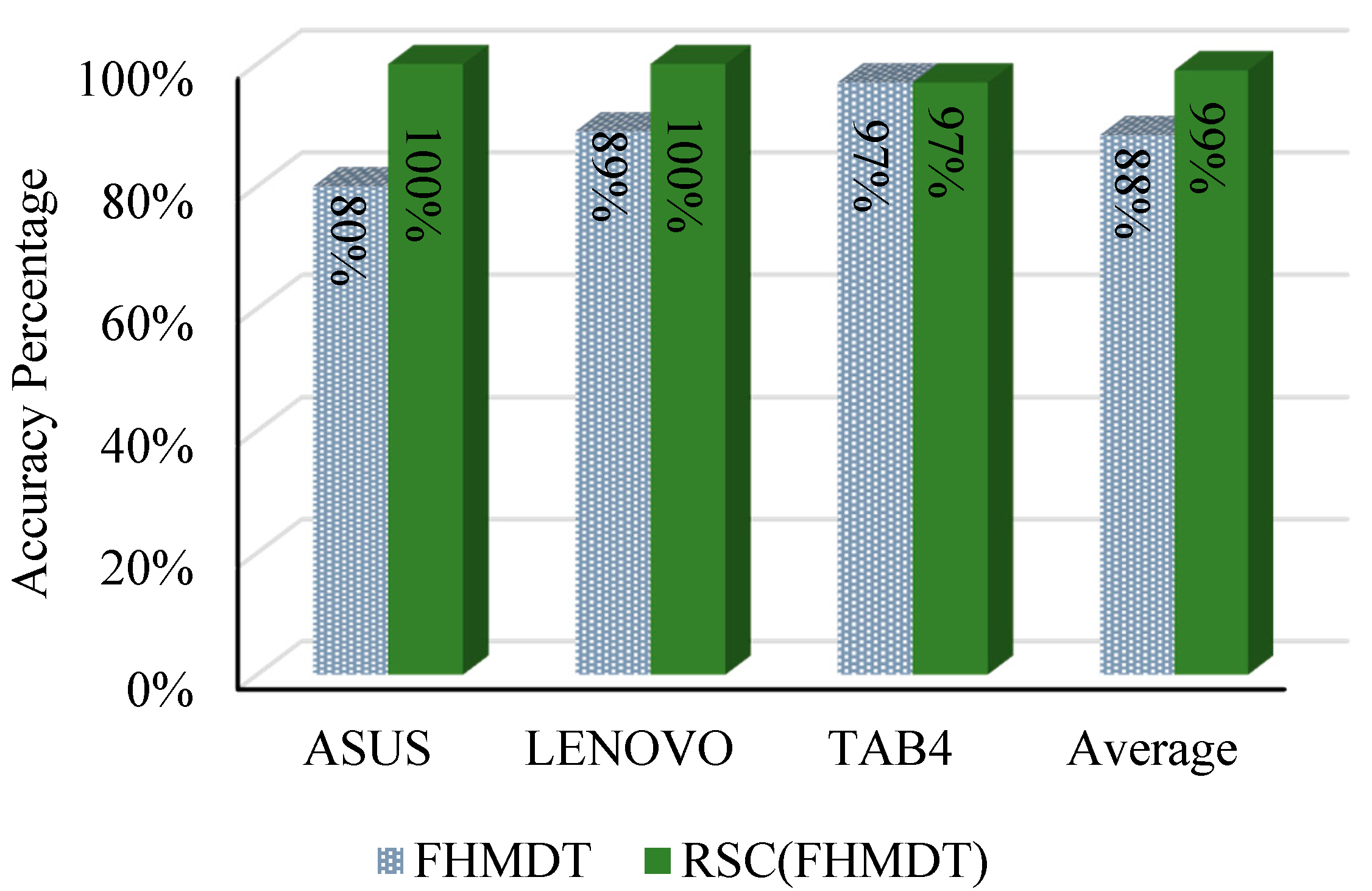
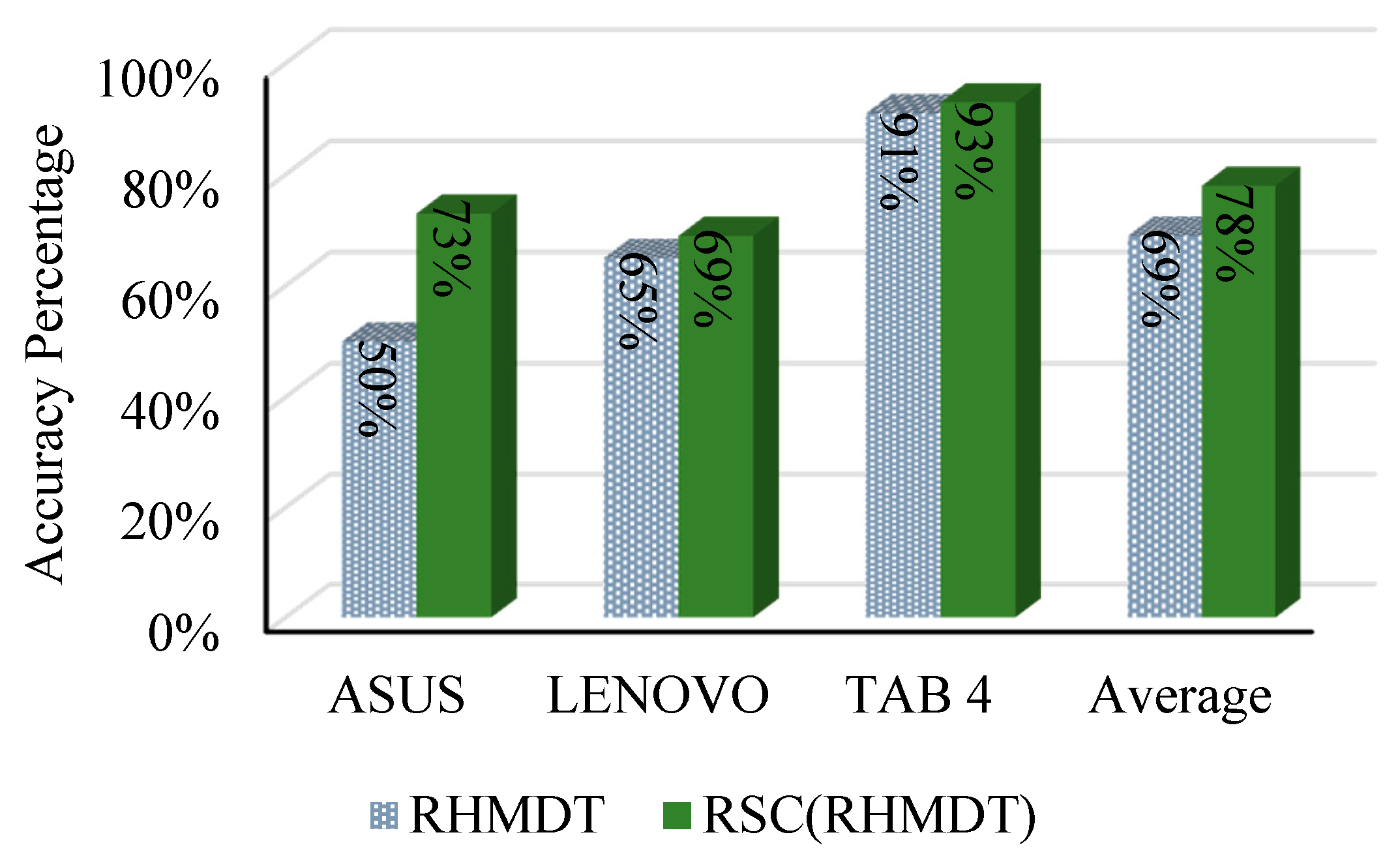
4.2. Solution of Mobile Devices Heterogeneity
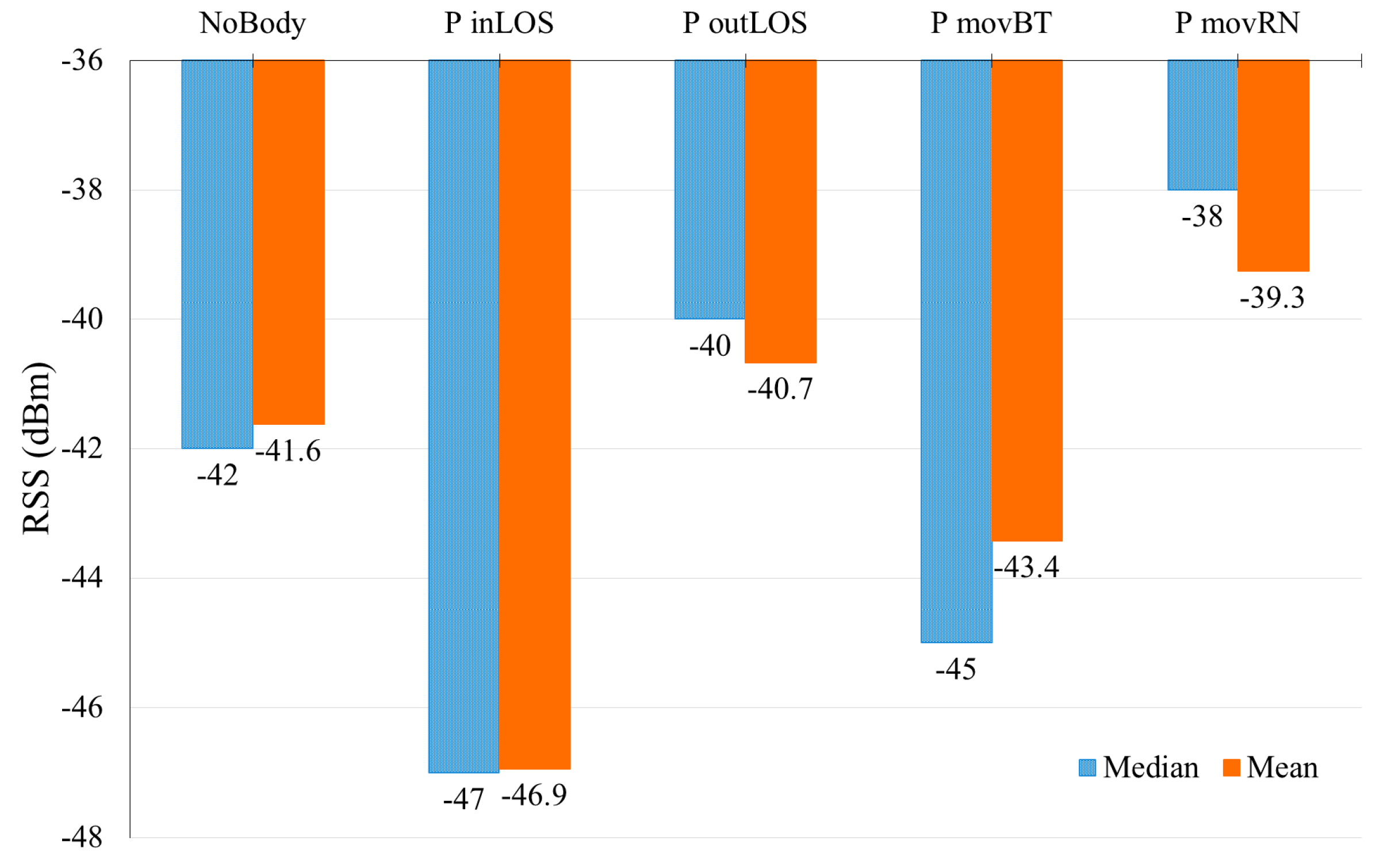
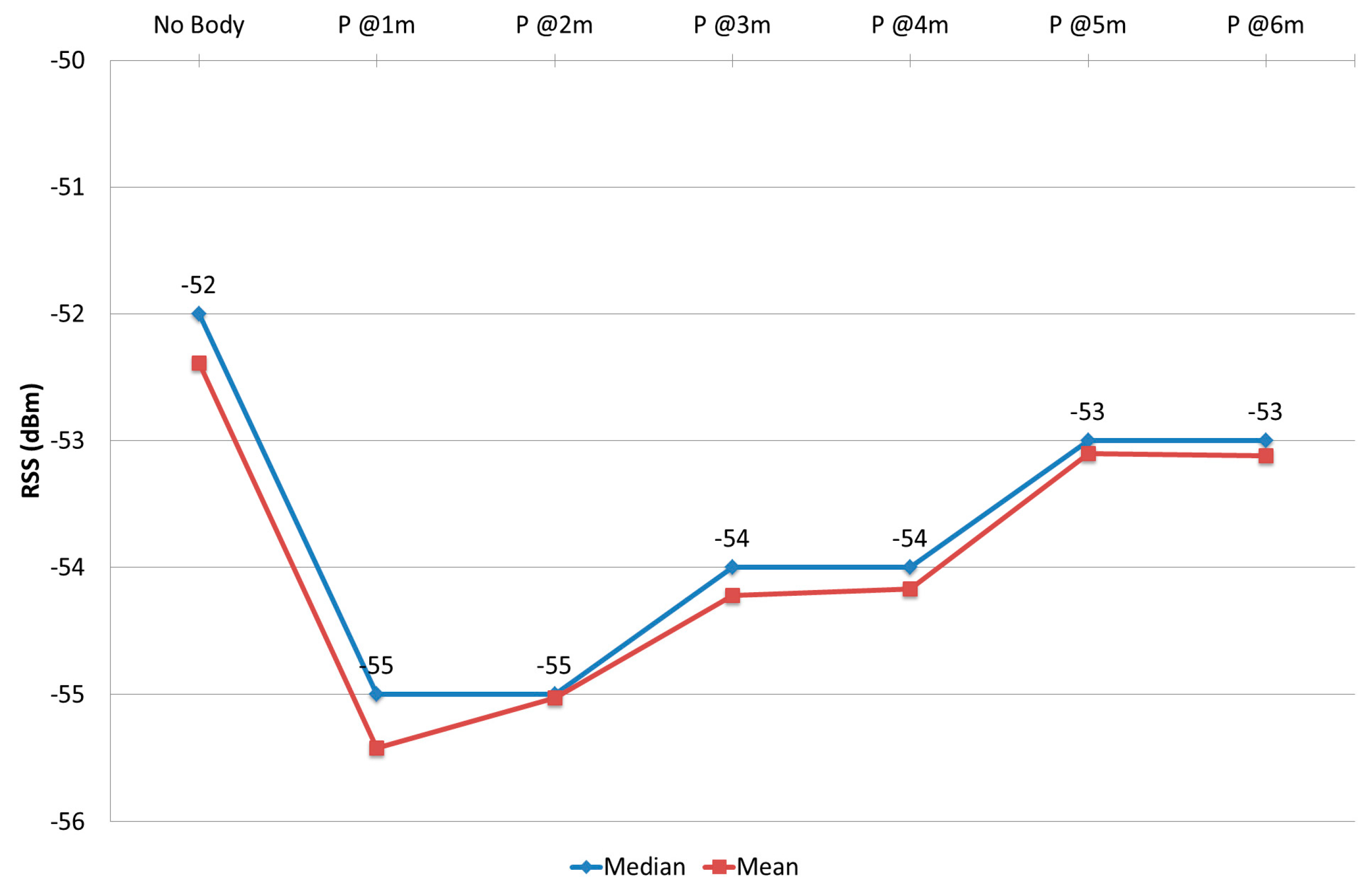
4.3. People Presence Effect
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Z.; Wang, X.; Jian, L. Location, localization, and localizability. J. Comput. Sci. Technol. 2010, 25, 274–297. [Google Scholar] [CrossRef]
- Farid, Z.; Nordin, R.; Ismail, M. Recent advances in wireless indoor localization techniques and system. J. Comput. Netw. Commun. 2013, 2013, 185138. [Google Scholar] [CrossRef]
- Schiller, J.; Voisard, A. Location-Based Services; Elsevier: Amsterdam, The Netherlands, 2004; ISBN 978-0-08-049172-1. [Google Scholar]
- Kuo, R.J.; Shieh, M.C.; Zhang, J.W.; Chen, K.Y. The application of an artificial immune system-based back-propagation neural network with feature selection to an RFID positioning system. Robot. Comput. Integr. Manuf. 2013, 29, 431–438. [Google Scholar] [CrossRef]
- Salido-Monzú, D.; Martín-Gorostiza, E.; Lá-Galilea, J.L.; Domingo-Pérez, F.; Wieser, A. Multipath mitigation for a phase-based infrared ranging system applied to indoor positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Eric, M.; Zetik, R. Non Line of Sight effects in UWB indoor direct one-step selflocalization using distributed antenna system: Measurement based study. In Proceedings of the 19th International ITG Workshop on Smart Antennas (WSA 2015), Ilmenau, Germany, 3–5 March 2015. [Google Scholar]
- Medina, C.; Segura, J.C.; Holm, S. Feasibility of ultrasound positioning based on signal strength. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Iqbal, U. Adaptive integrated indoor pedestrian tracking system using MEMS sensors and hybrid WiFi/Bluetooth-Beacons with optimized grid-based Bayesian filtering algorithm. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation, Dana Point, CA, USA, 26–28 January 2015; pp. 437–444. [Google Scholar]
- Sun, L.; Zheng, Z.; He, T.; Li, F. Multifloor Wi-Fi localization system with floor identification. Int. J. Distrib. Sens. Netw. 2015, 11, 131523. [Google Scholar] [CrossRef]
- Bisio, I.; Lavagetto, F.; Marchese, M.; Sciarrone, A. Smart probabilistic fingerprinting for WiFi-based indoor positioning with mobile devices. Pervasive Mob. Comput. 2016, 31, 107–123. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Zheng, Z.; Chen, Y.; He, T.; Li, F.; Chen, D. Weight-RSS: A calibration-free and robust method for wlan-based indoor positioning. Int. J. Distrib. Sens. Netw. 2015, 11, doi–10. [Google Scholar] [CrossRef]
- Gezici, S. A survey on wireless position estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Firdaus; Ahmad, N.A.; Sahibuddin, S. Adapted WLAN Fingerprint Indoor Positioning System (IPS) Based on User Orientations. In Recent Trends in Information and Communication Technology; Springer: Berlin, Germany, 2017; pp. 226–236. [Google Scholar]
- Firdaus; Ahmad, N.A.; Sahibuddin, S. Effect of People around User to WLAN Indoor Positioning System Accuracy. In Proceedings of the Second Palestinian International Conference on Information and Communication Technology (PICICT 2017), Gaza, Palestine, 8–9 May 2017; pp. 17–21. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Krishnan, P.; Krishnakumar, A.S.; Ju, W.-H.; Mallows, C.; Gamt, S.N. A system for LEASE: Location estimation assisted by stationary emitters for indoor RF wireless networks. In Proceedings of the Twenty-Third Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2004), Hong Kong, China, 7–11 March 2004; Volume 2, pp. 1001–1011. [Google Scholar]
- Chai, X.; Yang, Q. Reducing the calibration effort for location estimation using unlabeled samples. In Proceedings of the Third IEEE International Conference on Pervasive Computing and Communications, Kauai Island, HI, USA, 8–12 March 2005; pp. 95–104. [Google Scholar]
- Ji, Y.; Biaz, S.; Pandey, S.; Agrawal, P. Dynamic indoor localization using wireless ethernet: The ARIADNE system. In International Conference on Wired/Wireless Internet Communications; Springer: Berlin, Germany, 2006; pp. 299–310. [Google Scholar]
- Lo, C.-C.; Hsu, L.-Y.; Tseng, Y.-C. Adaptive radio maps for pattern-matching localization via inter-beacon co-calibration. Pervasive Mob. Comput. 2012, 8, 282–291. [Google Scholar] [CrossRef]
- Narzullaev, A.; Park, Y. Novel calibration algorithm for received signal strength based indoor real-time locating systems. AEU Int. J. Electron. Commun. 2013, 67, 637–644. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Chiang, J.-R.; Chu, H.; Huang, P.; Tsui, A.W. Sensor-assisted wi-fi indoor location system for adapting to environmental dynamics. In Proceedings of the 8th ACM International Symposium on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Montreal, QC, Canada, 10–13 October 2005; pp. 118–125. [Google Scholar]
- Segou, O.E.; Mitilineos, S.A.; Thomopoulos, S.C. DALE: A range-free, adaptive indoor localization method enhanced by limited fingerprinting. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–8. [Google Scholar]
- Chen, Y.; Guo, D.; Cui, W.; Li, J. Self-adaptive Wi-Fi indoor positioning model. In Proceedings of the 23rd International Conference on Geoinformatics, Wuhan, China, 19–21 June 2015; pp. 1–6. [Google Scholar]
- Atia, M.M.; Noureldin, A.; Korenberg, M.J. Dynamic online-calibrated radio maps for indoor positioning in wireless local area networks. IEEE Trans. Mob. Comput. 2013, 12, 1774–1787. [Google Scholar] [CrossRef]
- Koweerawong, C.; Wipusitwarakun, K.; Kaemarungsi, K. Indoor localization improvement via adaptive RSS fingerprinting database. In Proceedings of the International Conference on Information Networking (ICOIN), Bangkok, Thailand, 28–30 January 2013; pp. 412–416. [Google Scholar]
- Ali, M.U.; Hur, S.; Park, Y. LOCALI: Calibration-Free Systematic Localization Approach for Indoor Positioning. Sensors 2017, 17, 1213. [Google Scholar] [CrossRef] [PubMed]
- Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.-C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.; et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors 2017, 17, 557. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.-H.; Yang, Y.-N. WiFi-based indoor positioning for multi-floor environment. In Proceedings of the TENCON 2011–2011 IEEE Region 10 Conference, Bali, Indonesia, 21–24 November 2011; pp. 597–601. [Google Scholar]
- Fan, X.; Shin, Y. Indoor localization for multi-wall, multi-floor environments in wireless sensor networks. In Proceedings of the Ninth Advanced International Conference on Telecommunication, Rome, Italy, 23–28 June 2013. [Google Scholar]
- Borrelli, A.; Monti, C.; Vari, M.; Mazzenga, F. Channel models for IEEE 802.11 b indoor system design. In Proceedings of the IEEE International Conference on Communications, Paris, France, 20–24 June 2004; Volume 6, pp. 3701–3705. [Google Scholar]
- Li, K.; Bigham, J.; Bodanese, E.L.; Tokarchuk, L. Location estimation in large indoor multi-floor buildings using hybrid networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 2137–2142. [Google Scholar]
- Hamida, E.B.; Chelius, G. Investigating the impact of human activity on the performance of wireless networks—An experimental approach. In Proceedings of the IEEE International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Montrreal, QC, Canada, 14–17 June 2010; pp. 1–8. [Google Scholar]
- Karadimas, P.; Allen, B.; Smith, P. Human body shadowing characterization for 60-GHz indoor short-range wireless links. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 1650–1653. [Google Scholar] [CrossRef]
- Turner, J.S.; Ramli, M.F.; Kamarudin, L.M.; Zakaria, A.; Shakaff, A.Y.M.; Ndzi, D.L.; Nor, C.M.; Hassan, N.; Mamduh, S.M. The study of human movement effect on Signal Strength for indoor WSN deployment. In Proceedings of the IEEE Conference on Wireless Sensor (ICWISE), Kuching, Malaysia, 2–4 December 2013; pp. 30–35. [Google Scholar]
- Fet, N.; Handte, M.; Marrón, P.J. A model for WLAN signal attenuation of the human body. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 499–508. [Google Scholar]
- Figuera, C.; Rojo-Álvarez, J.L.; Mora-Jiménez, I.; Guerrero-Curieses, A.; Wilby, M.; Ramos-López, J. Time-space sampling and mobile device calibration for WiFi indoor location systems. IEEE Trans. Mob. Comput. 2011, 10, 913–926. [Google Scholar] [CrossRef]
- Tsui, A.W.; Chuang, Y.-H.; Chu, H.-H. Unsupervised learning for solving RSS hardware variance problem in WiFi localization. Mob. Netw. Appl. 2009, 14, 677–691. [Google Scholar] [CrossRef]
- Kjaergaard, M.B. Indoor location fingerprinting with heterogeneous clients. Pervasive Mob. Comput. 2011, 7, 31–43. [Google Scholar] [CrossRef]
- Chen, L.-H.; Wu, E.H.-K.; Jin, M.-H.; Chen, G.-H. Homogeneous features utilization to address the device heterogeneity problem in fingerprint localization. IEEE Sens. J. 2014, 14, 998–1005. [Google Scholar] [CrossRef]
- Hossain, A.M.; Van, H.N.; Jin, Y.; Soh, W.-S. Indoor localization using multiple wireless technologies. In Proceedings of the IEEE International Conference on Mobile Adhoc and Sensor Systems, Pisa, Italy, 8–11 October 2007; pp. 1–8. [Google Scholar]
- Kjaergaard, M.B.; Munk, C.V. Hyperbolic location fingerprinting: A calibration-free solution for handling differences in signal strength (concise contribution). In Proceedings of the Sixth Annual IEEE International Conference on Pervasive Computing and Communications (PerCom), Hong Kong, China, 17–21 March 2008; pp. 110–116. [Google Scholar]
- Jimenez, E.; Wei, R. Indoor localization of ubiquitous heterogeneous devices. In Proceedings of the IEEE 17th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Whistler, BC, Canada, 27–29 June 2013; pp. 698–703. [Google Scholar]
- Luo, J.; Zhan, X. Characterization of Smart Phone Received Signal Strength Indication for WLAN Indoor Positioning Accuracy Improvement. JNW 2014, 9, 739–746. [Google Scholar] [CrossRef]
- Alshami, I.H.; Salleh, N.A.A.; Sahibuddin, S. Automatic WLAN fingerprint radio map generation for accurate indoor positioning based on signal path loss model. ARPN J. Eng. Appl. Sci. 2015, 10, 17930–17936. [Google Scholar]
- Alshami, I.H.; Ahmad, N.A.; Sahibuddin, S. Dynamic WLAN Fingerprinting RadioMap for Adapted Indoor Positioning Model; Communications in Computer and Information Science. In Intelligent Software Methodologies, Tools and Techniques; Fujita, H., Selamat, A., Eds.; Springer International Publishing: Basel, Switzerland, 2014; pp. 119–133. [Google Scholar]
- Alshami, I.H.; Ahmad, N.A.; Sahibuddin, S. People’s Presence Effect on WLAN-Based IPS’ Accuracy. J. Teknologi. 2015, 77, 173–178. [Google Scholar]
- Alshami, I.H.; Ahmad, N.A.; Sahibuddin, S.; Yusof, Y.M. The effect of people presence on WLAN RSS is governed by influence distance. In Proceedings of the 3rd International Conference on Computer and Information Sciences (ICCOINS), Kuala Lumpur, Malaysia, 15–17 August 2016; pp. 197–202. [Google Scholar]
- Halshami, I.; Ahmad, N.A.; Sahibuddin, S. Adapted Indoor Positioning Model Based on Dynamic WLAN Fingerprinting RadioMap. In Proceedings of the 13th International Conference on New Trends in Intelligent Software Methodology Tools, and Techniques, Langkawi, Malaysia, 22–24 September 2014; pp. 337–353. [Google Scholar]
- Lott, M.; Forkel, I. A multi-wall-and-floor model for indoor radio propagation. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference (Spring 2001), Rhodes, Greece, 6–9 May 2001; Volume 1, pp. 464–468. [Google Scholar]
- Hall, E.T. A system for the notation of proxemic behavior. Am. Anthropol. 1963, 65, 1003–1026. [Google Scholar] [CrossRef]
- Hickson, M.L.; Stacks, D.W. Nonverbal Communication: Studies and Applications; McGraw-Hill Humanities, Social Sciences & World Languages; Oxford University Press: Oxford, UK, 1992. [Google Scholar]
- Yang, Z.; Wu, C.; Liu, Y. Locating in fingerprint space: Wireless indoor localization with little human intervention. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 269–280. [Google Scholar]
- Shi, J.; Shin, Y. A low-complexity floor determination method based on WiFi for multi-floor buildings. In Proceedings of the 9th Advanced International Conference on Telecommunications, Rome, Italy, 23–28 June 2013. [Google Scholar]
- Campos, R.S.; Lovisolo, L.; de Campos, M.L.R. Wi-Fi multi-floor indoor positioning considering architectural aspects and controlled computational complexity. Expert Syst. Appl. 2014, 41, 6211–6223. [Google Scholar] [CrossRef]
- Gupta, P.; Bharadwaj, S.; Ramakrishnan, S.; Balakrishnan, J. Robust floor determination for indoor positioning. In Proceedings of the Twentieth National Conference on Communications (NCC), Kanpur, India, 28 Feburary–2 March 2014; pp. 1–6. [Google Scholar]
- Maneerat, K.; Prommak, C. An Enhanced Floor Estimation Algorithm for Indoor Wireless localization systems using confidence interval approach. Int. J. Comput. Electron. Autom. Control Inf. Eng. 2014, 8, 1182–1186. [Google Scholar]
- Vahidnia, M.H.; Malek, M.R.; Mohammadi, N.; Alesheikh, A.A. A hierarchical signal-space partitioning technique for indoor positioning with WLAN to support location-awareness in mobile map services. Wirel. Pers. Commun. 2013, 69, 689–719. [Google Scholar] [CrossRef]
- Hossain, A.M.; Jin, Y.; Soh, W.-S.; Van, H.N. SSD: A robust RF location fingerprint addressing mobile devices’ heterogeneity. IEEE Trans. Mob. Comput. 2013, 12, 65–77. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Used Technique | Accuracy |
|---|---|---|
| Shi [56] | Path loss model with Feedback analysis | Up to 100% |
| Campos [57] | Kohenon and Backpropagation Neural Network | 91–97% |
| Gupta [58] | Radio propagation model, maximum likelihood and pressure sensor | Up to 100% |
| Maneerat [59] | WSN with confidence interval | Up to 100% |
| Sun [10] | Fisher’s Linear Discriminant and weighted KNN | 94% |
| The Proposed Model | Path loss model + KNN | 93–100% |
| Study | The Method Used | Distance Error (m) |
|---|---|---|
| Bahl [18] | Manual Radio Map + KNN | 2.5 |
| Hung-Huan [31] | Path Loss model + Triangulation | 1.6 |
| Vahidnia [60] | Manual Radio Map + BPM | 1.4 |
| Sun [10] | Manual Radio Map + Weighted KNN | 1.2 |
| The Proposed Model | Path Loss Model + KNN | 1.2 |
| Calibration-Free Techniques | Mobile Devices | Positioning Average | ||
|---|---|---|---|---|
| ASUS | LENOVO | TAB4 | ||
| w-RSS [14] | 38% | 69% | 69% | 59% |
| HLF [41] | 58% | 73% | 54% | 62% |
| SSD [61] | 65% | 65% | 58% | 63% |
| RSC | 73% | 69% | 93% | 78% |
| Number of Persons | Distance from MD (m) | |||
|---|---|---|---|---|
| Position A | Position B | Position C | Position D | |
| 1 person | 1 | 2 | 3 | 4 |
| 2 person | 1 and 2 | 1 and 3 | 1 and 4 | 2 and 3 |
| 3 person | 1, 2, and 3 | 1, 2, and 4 | 1, 3 and 4 | 2, 3 and 4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshami, I.H.; Ahmad, N.A.; Sahibuddin, S.; Firdaus, F. Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments. Sensors 2017, 17, 1789. https://doi.org/10.3390/s17081789
Alshami IH, Ahmad NA, Sahibuddin S, Firdaus F. Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments. Sensors. 2017; 17(8):1789. https://doi.org/10.3390/s17081789
Chicago/Turabian StyleAlshami, Iyad Husni, Noor Azurati Ahmad, Shamsul Sahibuddin, and Firdaus Firdaus. 2017. "Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments" Sensors 17, no. 8: 1789. https://doi.org/10.3390/s17081789
APA StyleAlshami, I. H., Ahmad, N. A., Sahibuddin, S., & Firdaus, F. (2017). Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments. Sensors, 17(8), 1789. https://doi.org/10.3390/s17081789