A Study on AIN Film-Based SAW Attenuation in Liquids and Their Potential as Liquid Ethanol Sensors


Abstract
:1. Introduction
2. Experimental
2.1. Theoretical Analysis
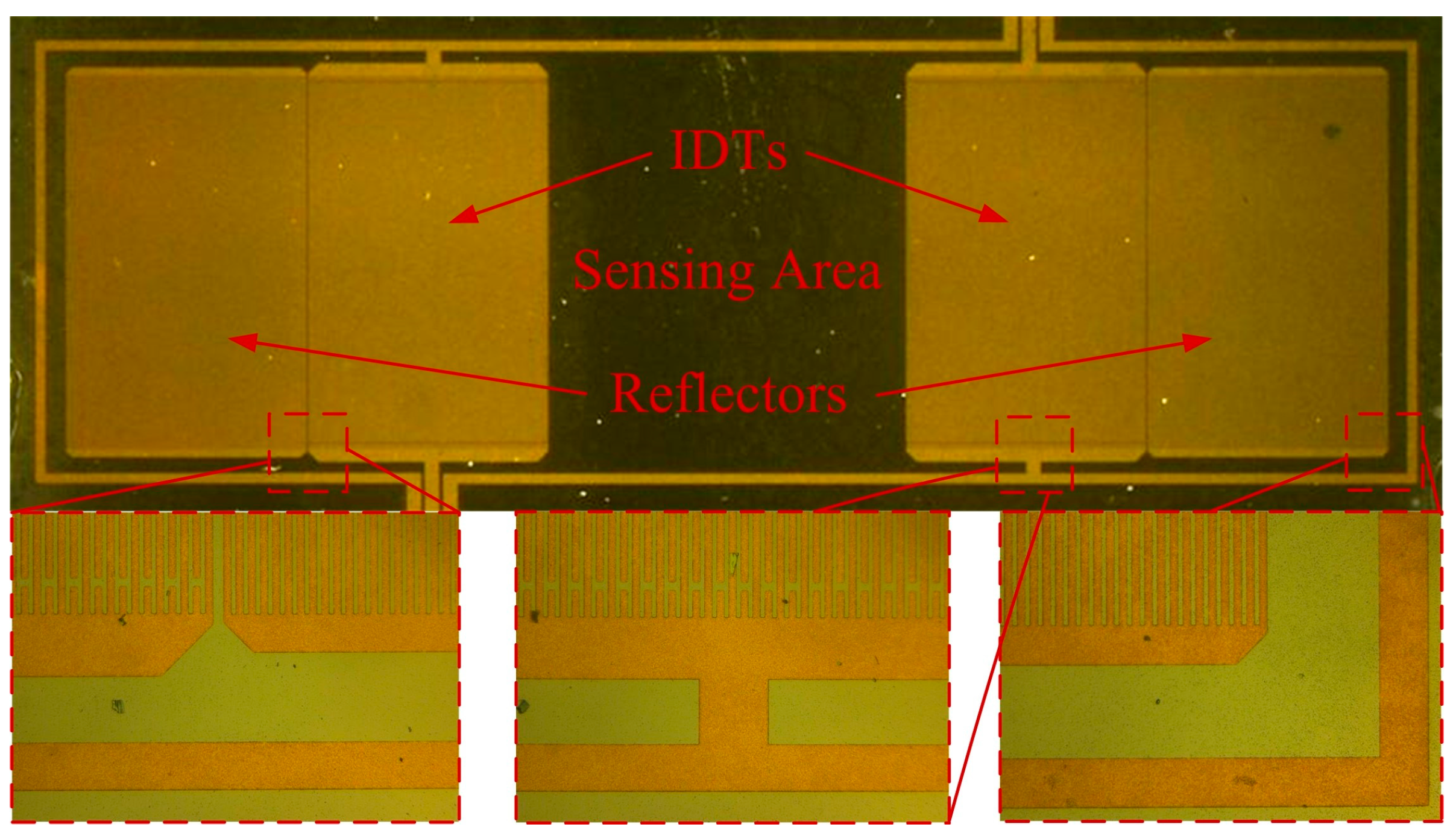
2.2. Device Design and Fabrication
2.3. Characterization of AIN Film
2.4. Experimental Set-Up
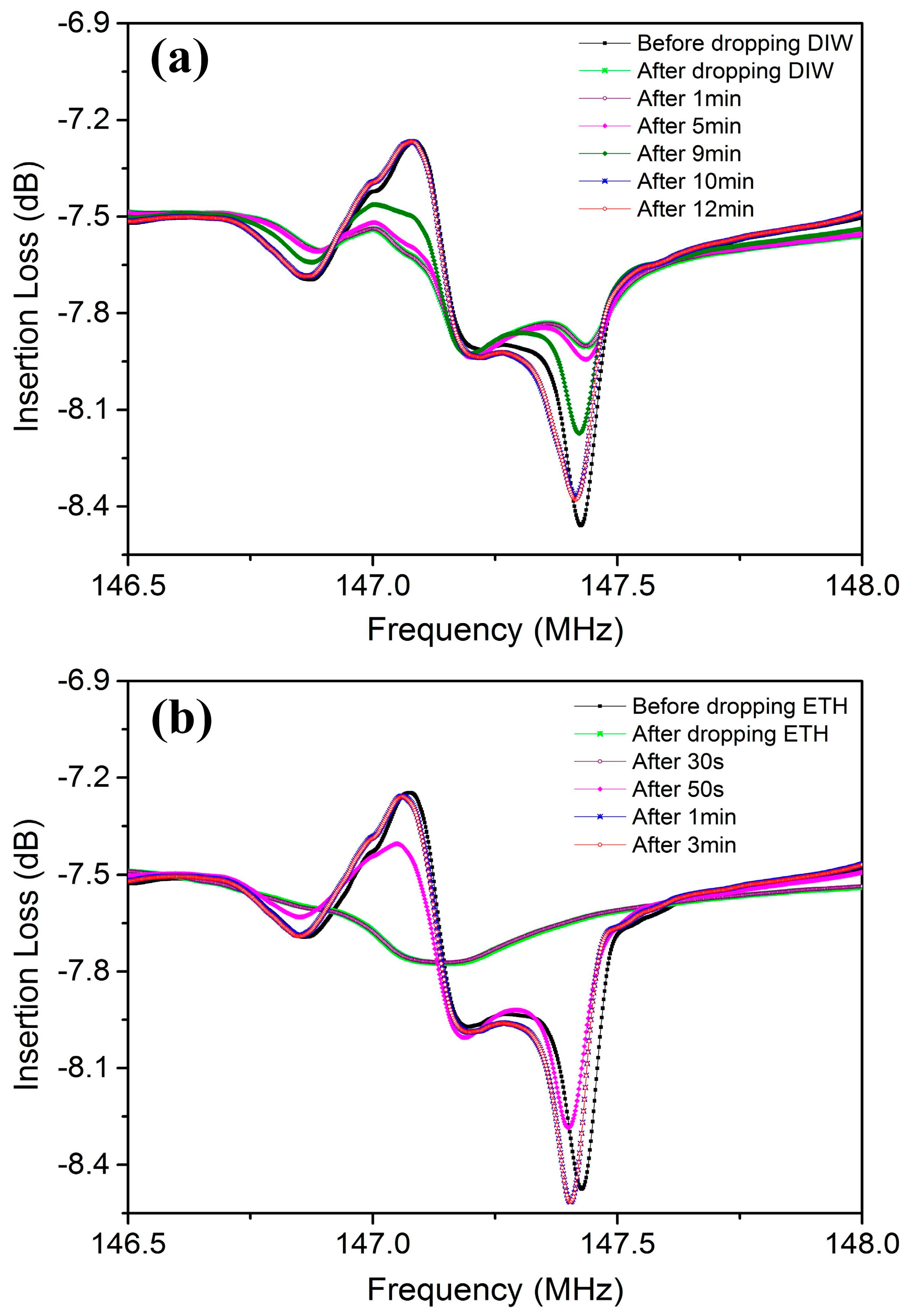
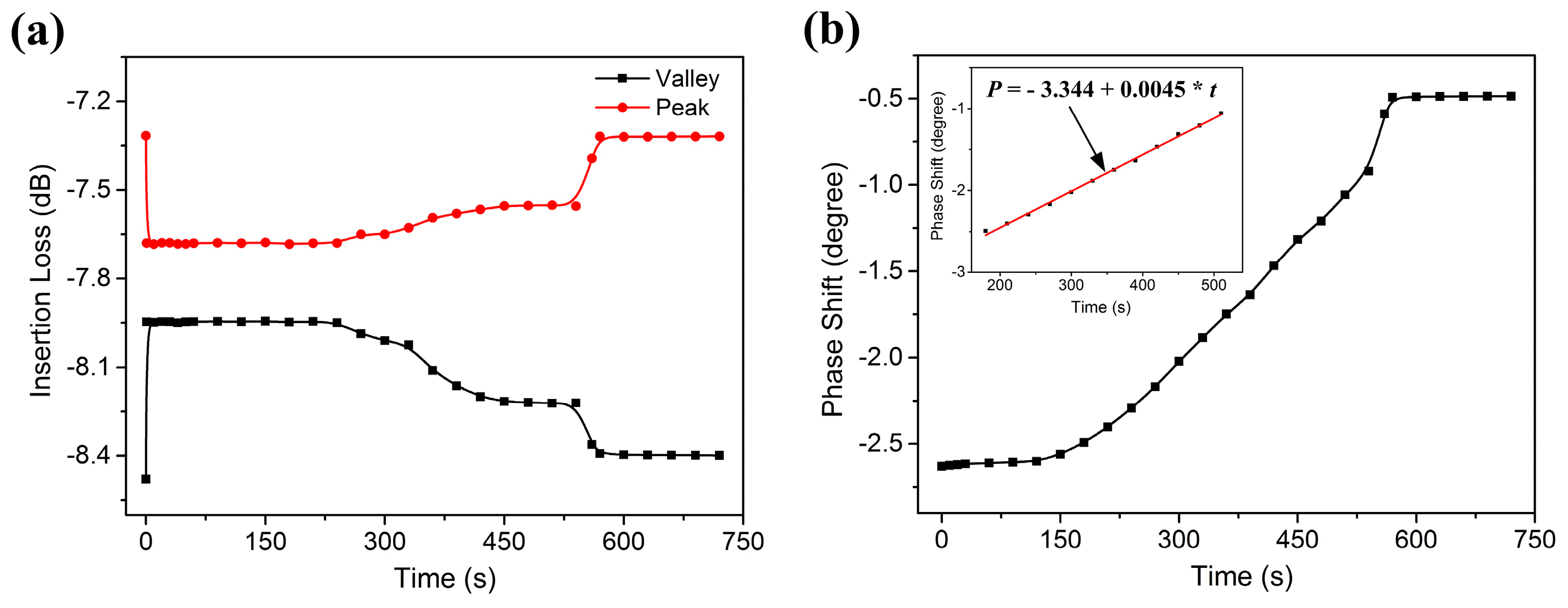
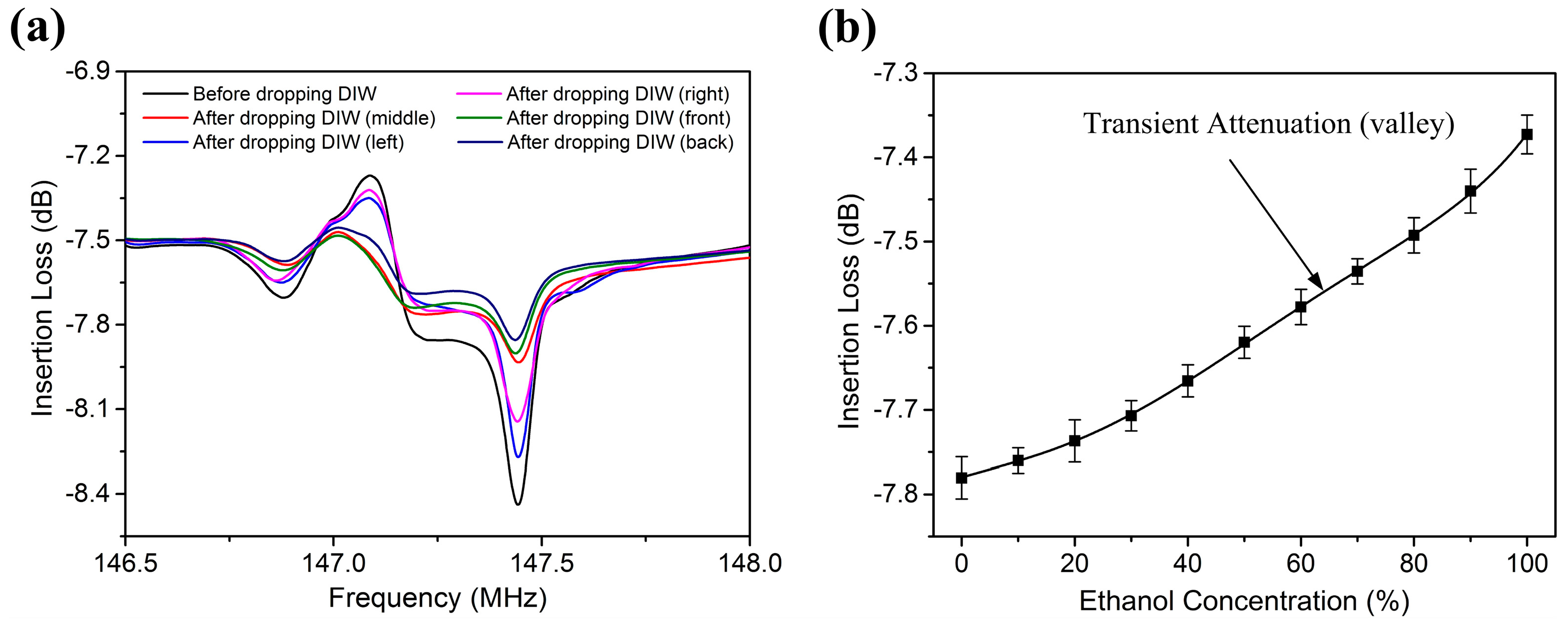
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, W.; Xue, X.; Huang, Y.; Liu, X. A novel wireless and temperature-compensated SAW vibration sensor. Sensors 2014, 14, 20702–20712. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Green, R.; Nair, R.R.; Howell, M.; Mohapatra, S.; Guldiken, R.; Mohapatra, S.S. Surface Acoustic Waves (SAW)-Based Biosensing for Quantification of Cell Growth in 2D and 3D Cultures. Sensors 2015, 15, 32045–32055. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.Q.; Wang, W.; Xue, X.F.; Hu, H.L.; Liu, X.L.; Pan, Y. Development of a wireless and passive SAW-based chemical sensor for organophosphorous compound detection. Sensors 2015, 15, 30187–30198. [Google Scholar] [CrossRef] [PubMed]
- Larson, D.A.; Magnusson, R.; Black, T.D.; Green, M.; Torti, R.G.; Wang, Y.J. Optical modulation by a traveling surface acoustic wave and a holographic reference grating. J. Opt. Soc. Am. A 1990, 7, 1745–1750. [Google Scholar] [CrossRef]
- Fu, Y.Q.; Luo, J.K.; Du, X.Y.; Flewitt, A.J.; Li, Y.; Markx, G.H.; Walton, A.J.; Milne, W.I. Recent developments on ZnO films for acoustic wave based bio-sensing and microfluidic applications: A review. Sens. Actuators B Chem. 2010, 143, 606–619. [Google Scholar] [CrossRef]
- Guo, Y.J.; Lv, H.B.; Li, Y.F.; He, X.L.; Zhou, J.; Luo, J.K.; Zu, X.T.; Walton, A.J.; Fu, Y.Q. High frequency microfluidic performance of LiNbO3 and ZnO surface acoustic wave devices. J. Appl. Phys. 2014, 116, 024501. [Google Scholar] [CrossRef]
- Zhou, J.; DeMiguel-Ramos, M.; Garcia-Gancedo, L.; Iborra, E.; Olivares, J.; Jin, H.; Luo, J.K.; Elhady, A.S.; Dong, S.R.; Wang, D.M.; et al. Characterisation of aluminium nitride films and surface acoustic wave devices for microfluidic applications. Sens. Actuators B Chem. 2014, 202, 984–992. [Google Scholar] [CrossRef]
- Franke, T.A.; Wixforth, A. Microfluidics for miniaturized laboratories on a chip. Chem. Phys. Chem. 2008, 9, 2140–2156. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.H.; Lenigk, R.; Grodzinski, P. Acoustic micromixer for enhancement of DNA biochip systems. J. Micro/Nanolith. MEMS MOEMS 2003, 2, 178–184. [Google Scholar] [CrossRef]
- Toegl, A.; Kirchner, R.; Gauer, C.; Wixforth, A. Enhancing results of microarray hybridizations through microagitation. J. Biomol. Tech. 2003, 14, 197–204. [Google Scholar] [PubMed]
- Bertoni, H.L.; Tamir, T. Unified theory of Rayleigh-angle phenomena for acoustic beams at liquid-solid interfaces. Appl. Phys. A 1973, 2, 157–172. [Google Scholar] [CrossRef]
- Viktorov, I. Rayleigh and Lamb Waves: Physical Theory and Applications; Plenum Press: New York, NY, USA, 1967. [Google Scholar]
- Arzt, R.M.; Salzmann, E.; Dransfeld, K. Elastic surface waves in quartz at 316 MHz. Appl. Phys. Lett. 1967, 10, 165–167. [Google Scholar] [CrossRef]
- Furukawa, S.; Nomura, T.; Yasuda, T. Characteristic features of leaky surface acoustic waves propagating on liquid/piezoelectric film glass structures. J. Phys. D 1991, 24, 706–713. [Google Scholar] [CrossRef]
- Rocha-Gaso, M.I.; March-Iborra, C.; Montoya-Baides, Á.; Arnau-Vives, A. Surface generated acoustic wave biosensors for the detection of pathogens: A review. Sensors 2009, 9, 5740–5769. [Google Scholar] [CrossRef] [PubMed]
- Kondoh, J.; Tada, K. Continuous measurement of liquid concentration using shear horizontal surface acoustic wave sensors without reference liquid. In Proceedings of the 2016 IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Liu, J.S.; Lu, Y.Y. Response mechanism for surface acoustic wave gas sensors based on surface-adsorption. Sensors 2014, 14, 6844–6853. [Google Scholar] [CrossRef] [PubMed]
- Du, X.Y.; Fu, Y.Q.; Luo, J.K.; Flewitt, A.J.; Milne, W.I. Microfluidic pumps employing surface acoustic waves generated in ZnO thin films. J. Appl. Phys. 2009, 105, 024508. [Google Scholar] [CrossRef]
- Zhang, A.L.; Wu, Z.Q.; Xia, X.H. Transportation and mixing of droplets by surface acoustic wave. Talanta 2011, 84, 293–297. [Google Scholar] [CrossRef] [PubMed]
- Ai, Y.; Marrone, B.L. Droplet translocation by focused surface acoustic waves. Microfluid. Nanofluid. 2012, 13, 715–722. [Google Scholar] [CrossRef]
- Shi, J.; Mao, X.; Ahmed, D.; Colletti, A.; Huang, T.J. Focusing microparticles in a microfluidic channel with standing surface acoustic waves (SSAW). Lab Chip 2008, 8, 221–223. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.J.; Dennison, A.P.; Li, Y.; Luo, J.K.; Zu, X.T.; Mackay, C.L.; Langridge-Smith, P.; Walton, A.J.; Fu, Y.Q. Nebulization of water/glycerol droplets generated by ZnO/Si surface acoustic wave devices. Microfluid. Nanofluid. 2015, 19, 273–282. [Google Scholar] [CrossRef]
- Raghavan, R.V.; Friend, J.R.; Yeo, L.Y. Particle concentration via acoustically driven microcentrifugation: MicroPIV flow visualization and numerical modelling studies. Microfluid. Nanofluid. 2010, 8, 73–84. [Google Scholar] [CrossRef]
- Bui, T.H.; Morana, B.; Tran, A.; Scholtes, T.; Duc, T.C.; Sarro, P.M. SAW decice for liquid vaporization rate and remaining molecule sensing. In Proceedings of the 2015 IEEE sensors, Busan, Korea, 1–4 November 2015; Volume 1, pp. 323–327. [Google Scholar]
- Bui, T.; Morana, B.; Scholtes, T.; Chu Duc, T.; Sarro, P.M. A mixing surface acoustic wave device for liquid sensing applications: Design, simulation, and analysis. J. Appl. Phys. 2016, 120, 074504. [Google Scholar] [CrossRef]
- Srivastava, S.K.; Verma, R.; Gupta, B.D. Surface plasmon resonance based fiber optic sensor for the detection of low water content in ethanol. Sens. Actuators B Chem. 2011, 153, 194–198. [Google Scholar] [CrossRef]
- Lee, Y.M.; Huang, C.M.; Chen, H.W.; Yang, H.W. Low temperature solution-processed ZnO nanorod arrays with application to liquid ethanol sensors. Sens. Actuators A Phys. 2013, 189, 307–312. [Google Scholar] [CrossRef]
- Lindner, G.; Faustmann, H.; Frankenberger, S.; Munch, M.; Pflaum, K.; Rothballer, S.; Unterburger, M. A Versatile Acoustic Waveguide Sensor for Liquids Based on Multiple Mode Conversion at Solid-Liquid Interfaces. In Proceedings of the 2006 IEEE Ultrasonics Symposium, Vancouver, BC, Canada, 2–6 October 2006; pp. 1181–1184. [Google Scholar]
- Jiao, Z.J.; Huang, X.Y.; Nguyen, N.T. Scattering and attenuation of surface acoustic waves in droplet actuation. J. Phys. A 2008, 41, 355502. [Google Scholar] [CrossRef]
- Schmid, L.; Wixforth, A.; Weitz, D.A.; Franke, T. Novel surface acoustic wave (SAW)-driven closed PDMS flow chamber. Microfluid. Nanofluid. 2012, 12, 229–235. [Google Scholar] [CrossRef]
- Sauerbrey, G.Z. Use of quartz vibrator for weighing thin films on a microbalance. Z. Phys. 1959, 155, 206–210. [Google Scholar] [CrossRef]
- He, X.L.; Li, D.J.; Zhou, J.; Wang, W.B.; Xuan, W.P.; Dong, S.R.; Jin, H.; Luo, J.K. High sensitivity humidity sensors using flexible surface acoustic wave devices made on nanocrystalline ZnO/polyimide substrates. J. Mater. Chem. C 2013, 1, 6210–6215. [Google Scholar] [CrossRef]
- Campanella, H. Acoustic Wave and Electromechanical Resonators: Concept to Key Applications; Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Su, Q.X.; Kirby, P.; Komuro, E.; Imura, M.; Zhang, Q.; Whatmore, R. Thin-film bulk acoustic resonators and filters using ZnO and lead-zirconium-titanate thin films. IEEE Trans. Microwave Theory Tech. 2001, 49, 769–778. [Google Scholar] [CrossRef]
- Wixforth, A. Acoustically driven planar microfluidics. Superlattices Microstruct. 2003, 33, 389–396. [Google Scholar] [CrossRef]
- Ricco, A.J.; Martin, S.J. Acoustic wave viscosity sensor. Appl. phys. lett. 1987, 50, 1474–1476. [Google Scholar] [CrossRef]
- Picknett, R.G.; Bexon, R. The evaporation of sessile or pendant drops in still air. J. Colloid Interface Sci. 1977, 61, 336–350. [Google Scholar] [CrossRef]
- Birdi, K.S.; Vu, D.T.; Winter, A. A study of the evaporation rates of small water drops placed on a solid surface. J. Phys. Chem. 1989, 93, 3702–3703. [Google Scholar] [CrossRef]
- Liu, C.; Bonaccurso, E.; Butt, H.J. Evaporation of sessile water/ethanol drops in a controlled environment. Phys. Chem. Chem. Phys. 2008, 10, 7150–7157. [Google Scholar] [CrossRef] [PubMed]
- Kondoh, J.; Shimizu, N.; Matsui, Y.; Sugimoto, M.; Shiokawa, S. Development of temperature-control system for liquid droplet using surface acoustic wave devices. Sens. Actuators A Phys. 2009, 149, 292–297. [Google Scholar] [CrossRef]
- Kondoh, J.; Shimizu, N.; Matsui, Y.; Shiokawa, S. Liquid heating effects by SAW streaming on the piezoelectric substrate. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 1881–1883. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Wavelength λ (µm) | 32 |
| interdigital transducer (IDT) thickness h (nm) | 300 |
| Acoustic aperture W (µm) | 2400 |
| Delay line length L (µm) | 2400 |
| Finger pairs NIDT | 50 × 50 |
| Grating number Nr | 200 |
| Volume (µL) | Contact Diameter (µm) | |
|---|---|---|
| DIW | Ethanol | |
| 0.2 | 880 | 1630 |
| 0.4 | 1080 | 1980 |
| 0.6 | 1320 | 2360 |
| 0.8 | 1480 | 2850 |
| 1 | 1620 | 3200 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Xu, Z.; Wang, Y.; Xie, J. A Study on AIN Film-Based SAW Attenuation in Liquids and Their Potential as Liquid Ethanol Sensors. Sensors 2017, 17, 1813. https://doi.org/10.3390/s17081813
Wang Y, Xu Z, Wang Y, Xie J. A Study on AIN Film-Based SAW Attenuation in Liquids and Their Potential as Liquid Ethanol Sensors. Sensors. 2017; 17(8):1813. https://doi.org/10.3390/s17081813
Chicago/Turabian StyleWang, Yong, Zhonggui Xu, Yinshen Wang, and Jin Xie. 2017. "A Study on AIN Film-Based SAW Attenuation in Liquids and Their Potential as Liquid Ethanol Sensors" Sensors 17, no. 8: 1813. https://doi.org/10.3390/s17081813
APA StyleWang, Y., Xu, Z., Wang, Y., & Xie, J. (2017). A Study on AIN Film-Based SAW Attenuation in Liquids and Their Potential as Liquid Ethanol Sensors. Sensors, 17(8), 1813. https://doi.org/10.3390/s17081813