Design and Implementation of 2.45 GHz Passive SAW Temperature Sensors with BPSK Coded RFID Configuration


Abstract
:1. Introduction
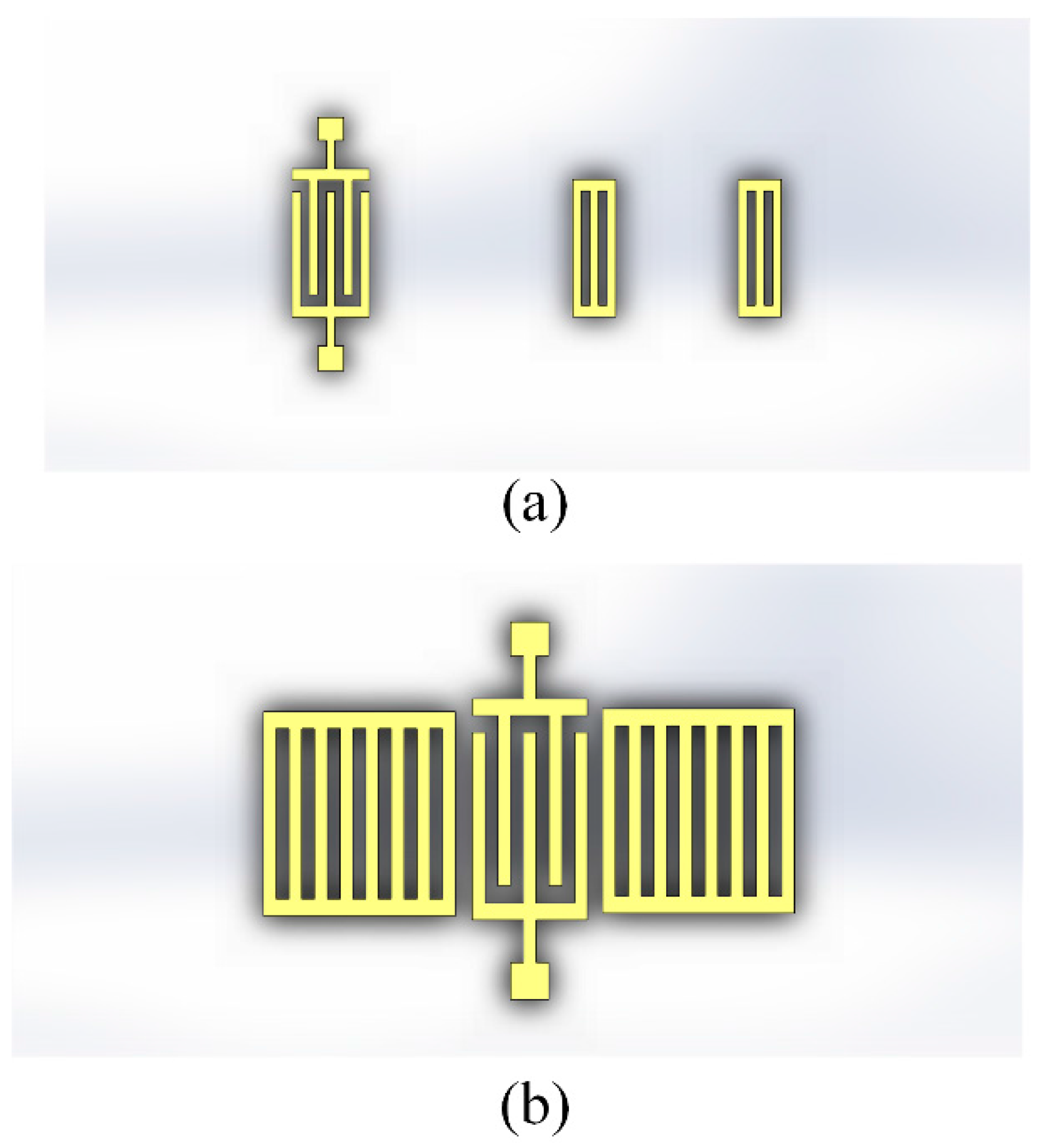
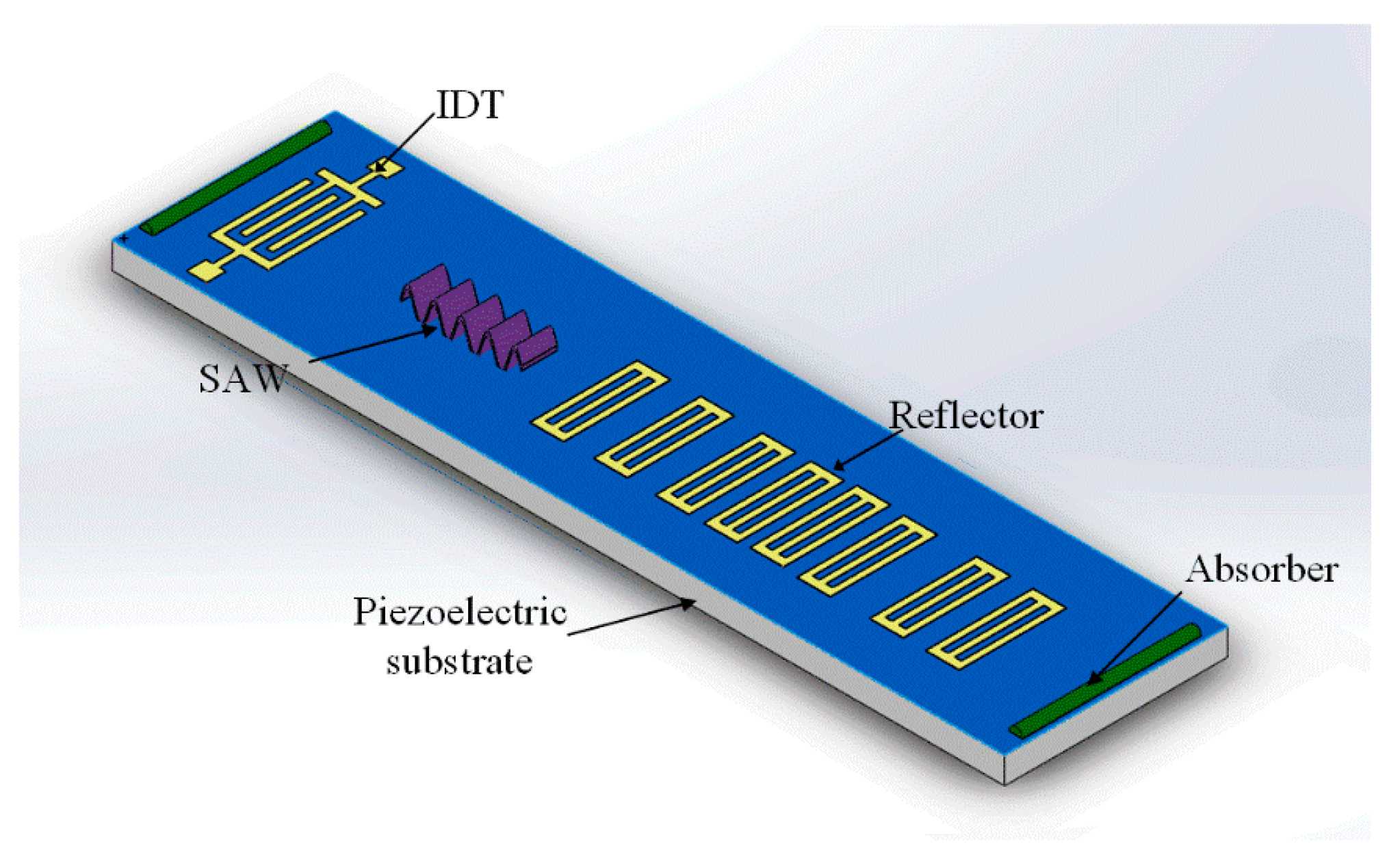
2. Design Considerations and Optimization
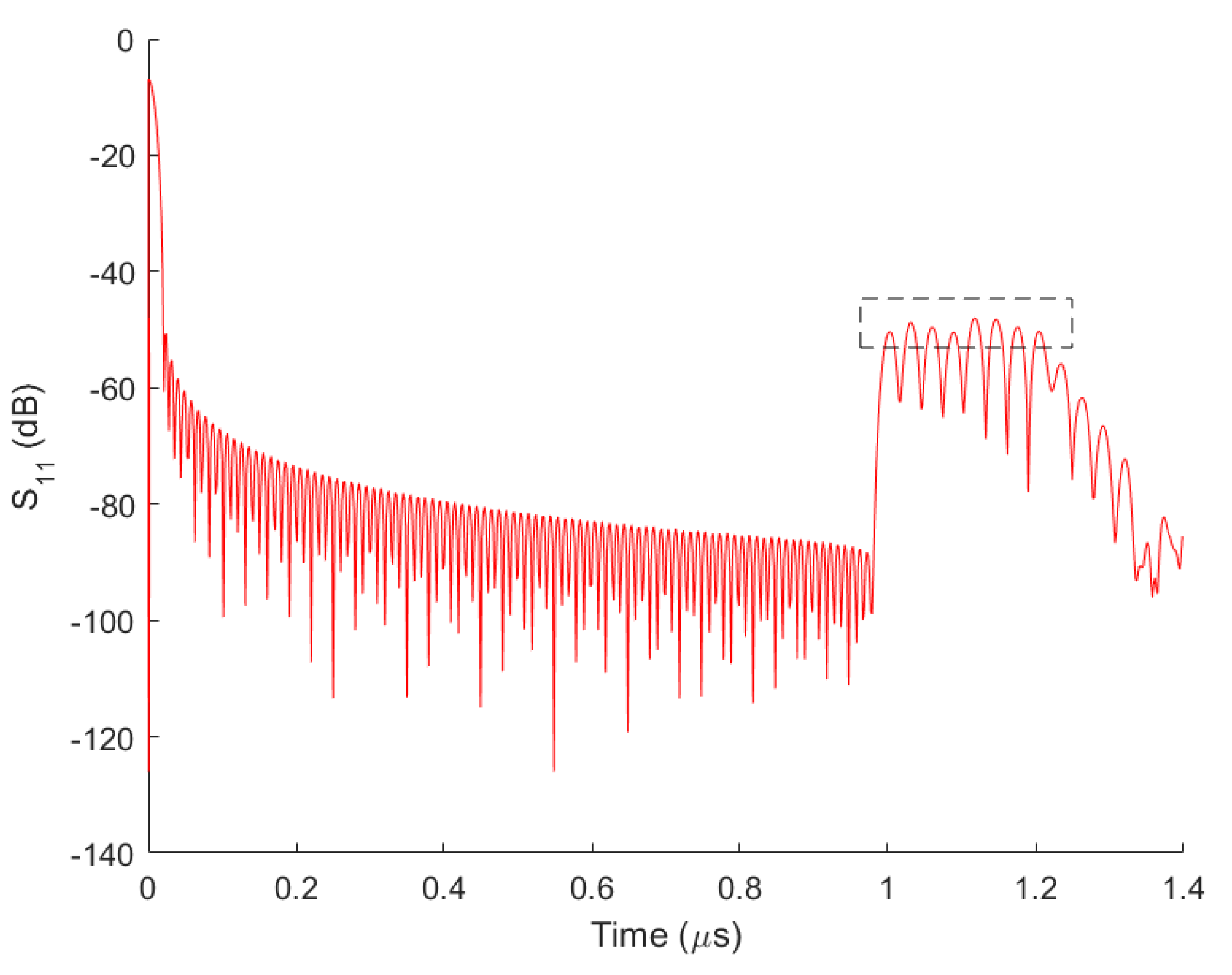
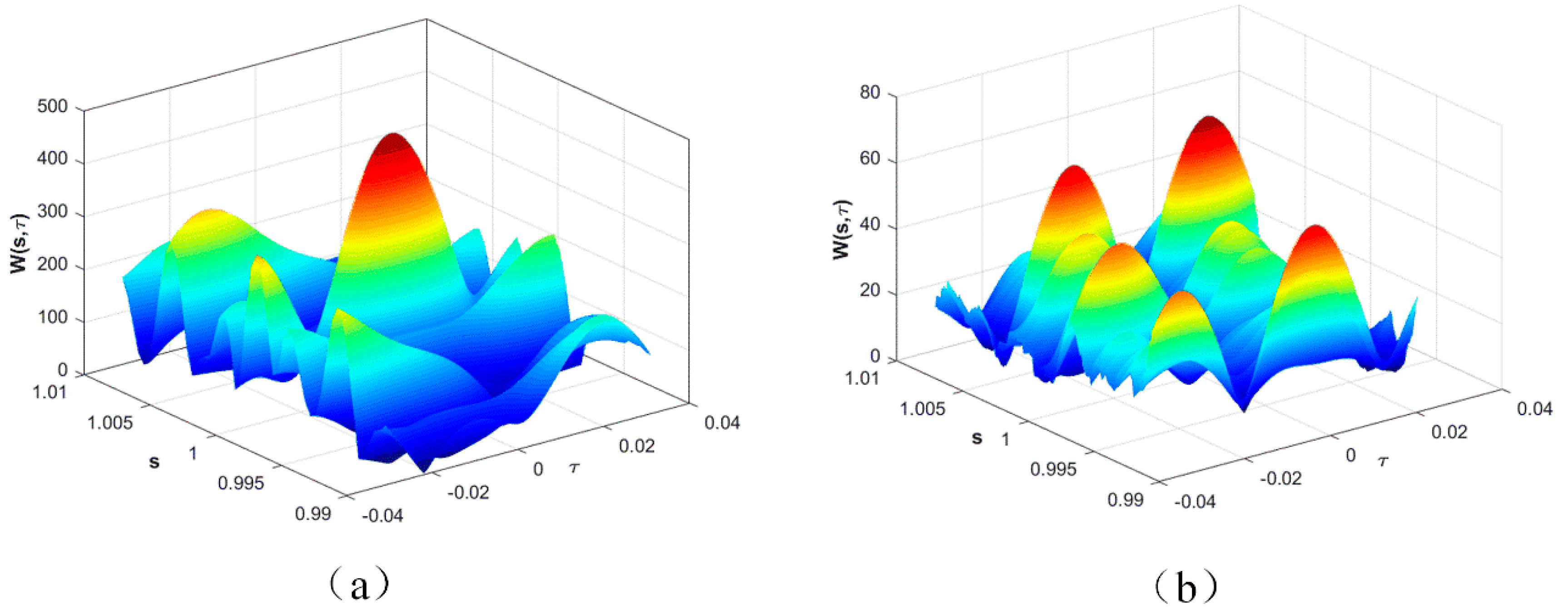
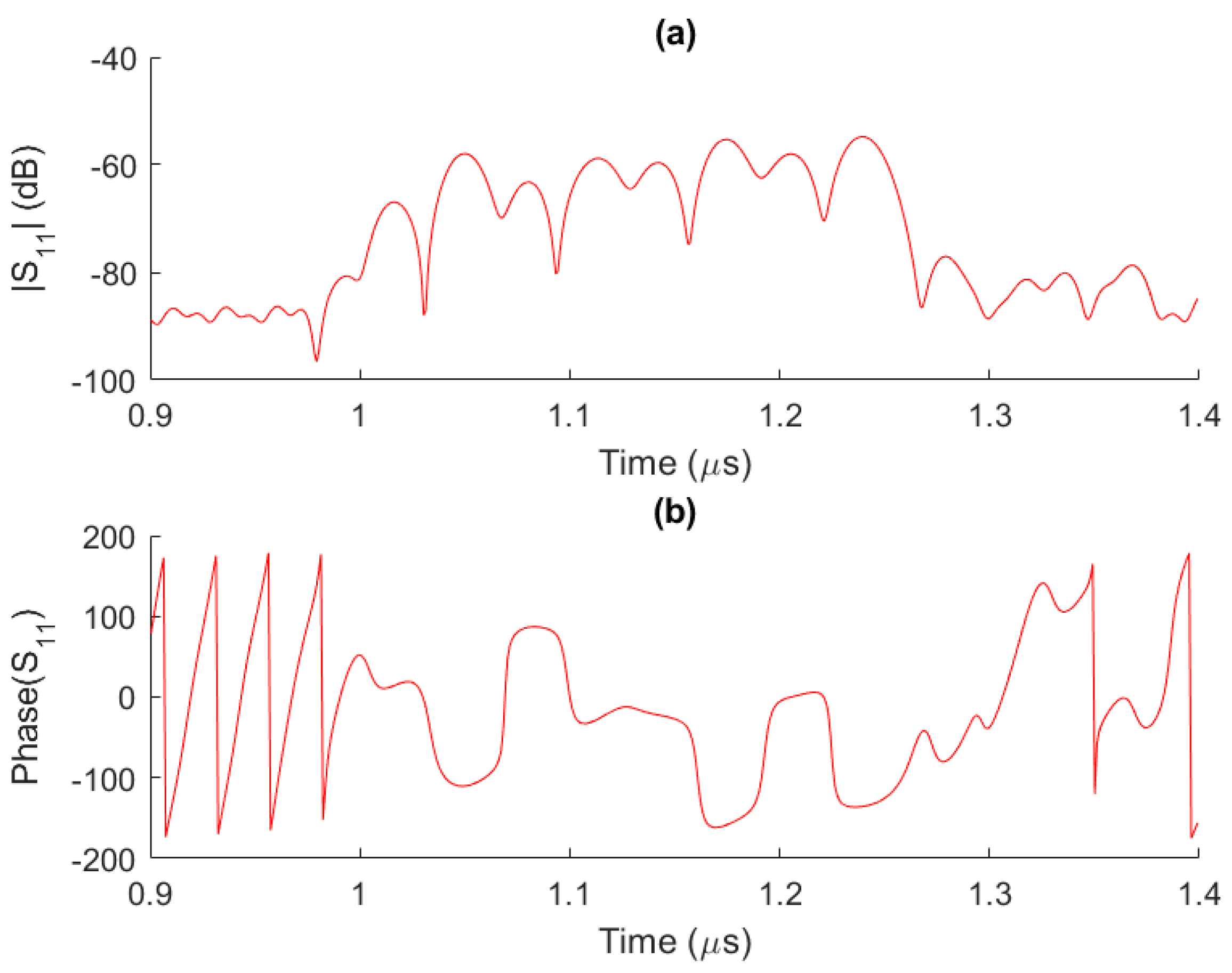
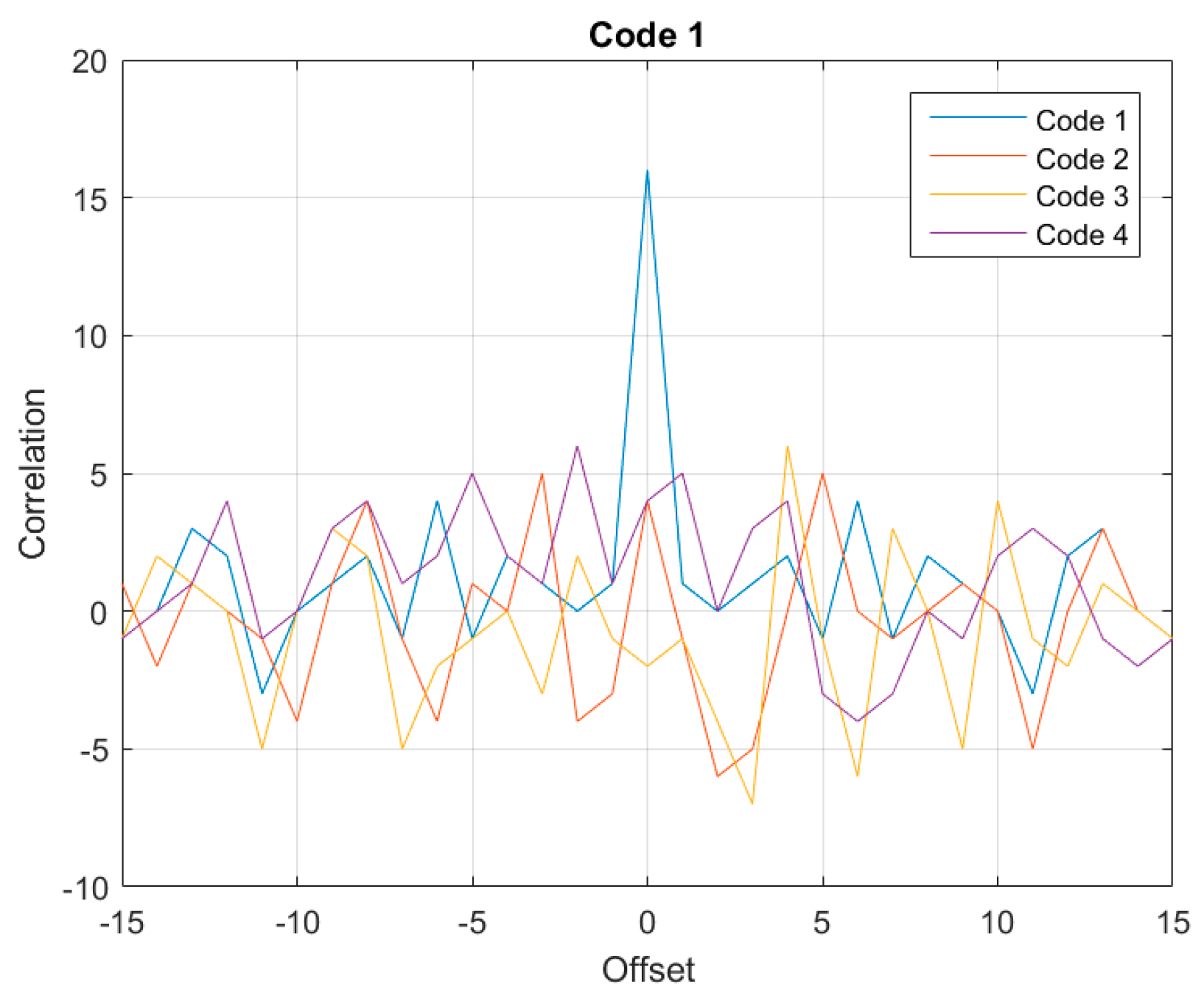
3. Correlation Processing Algorithm
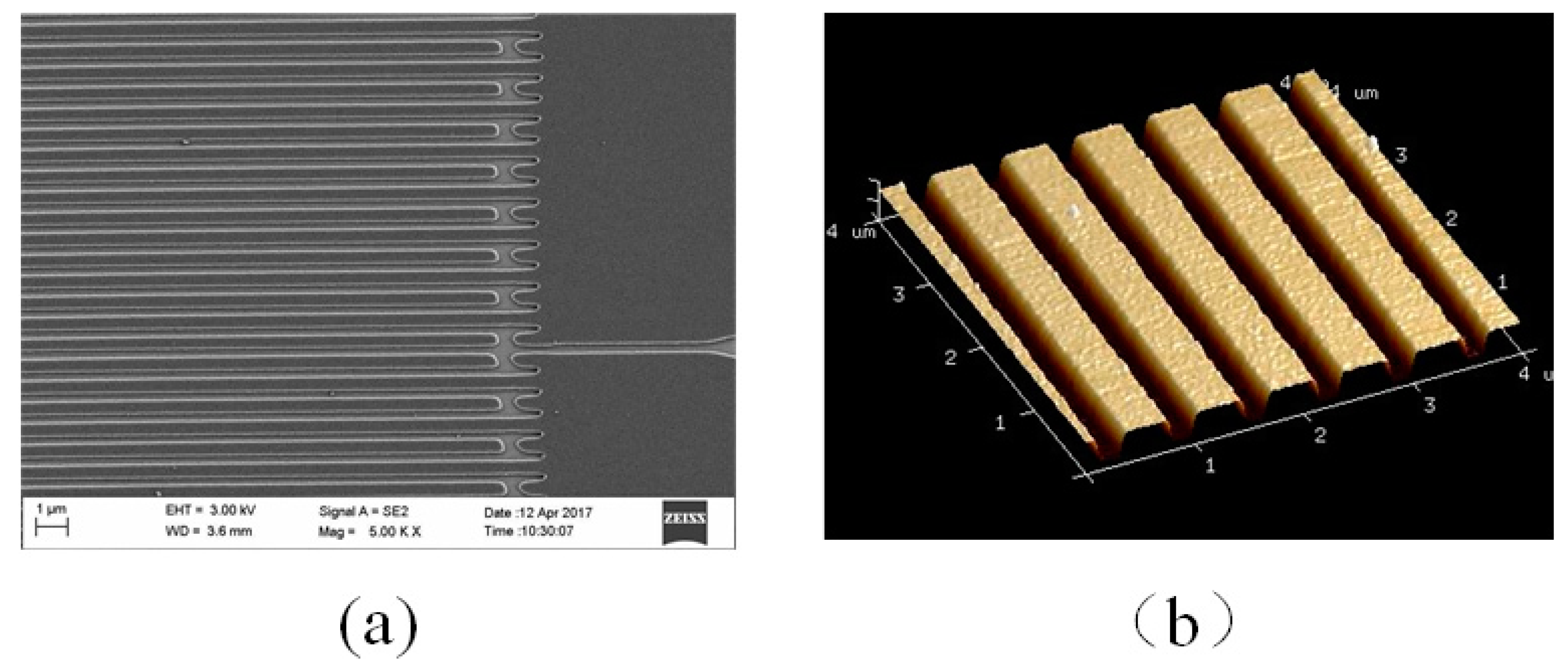
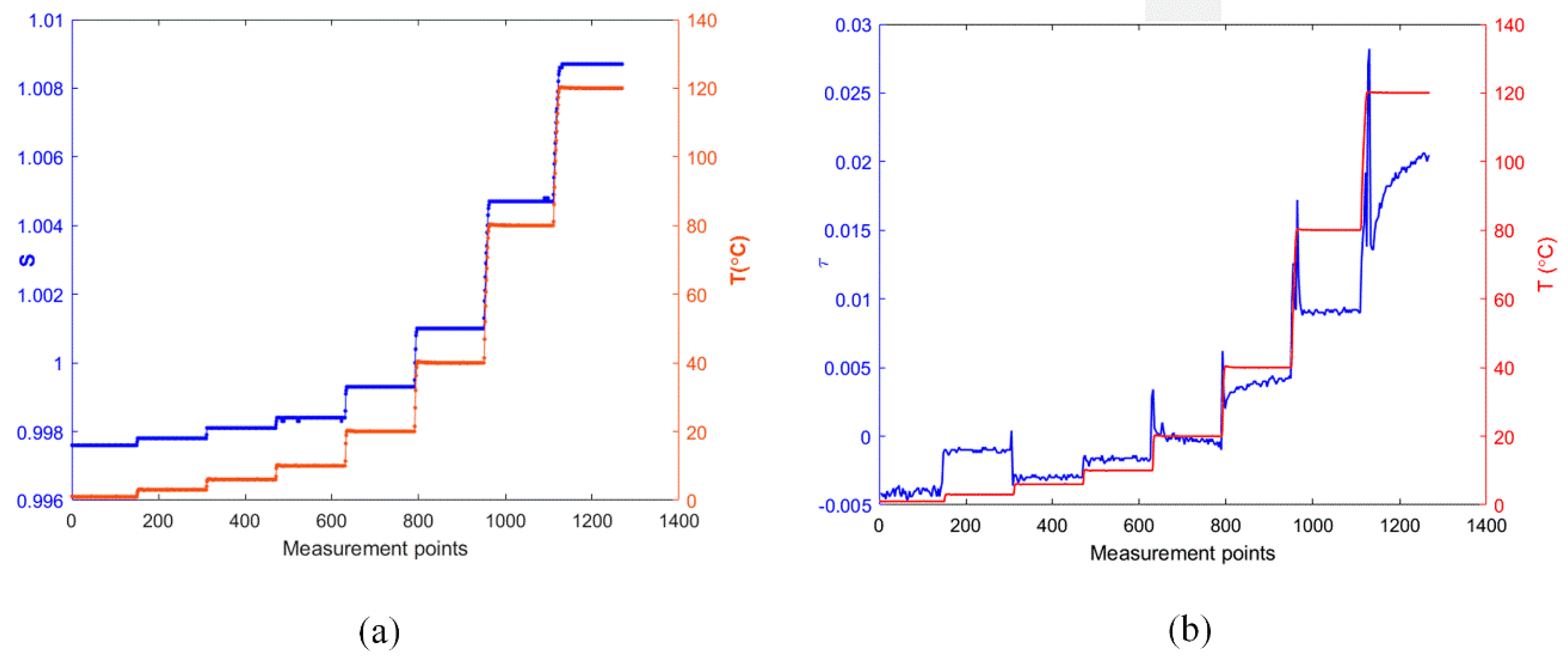
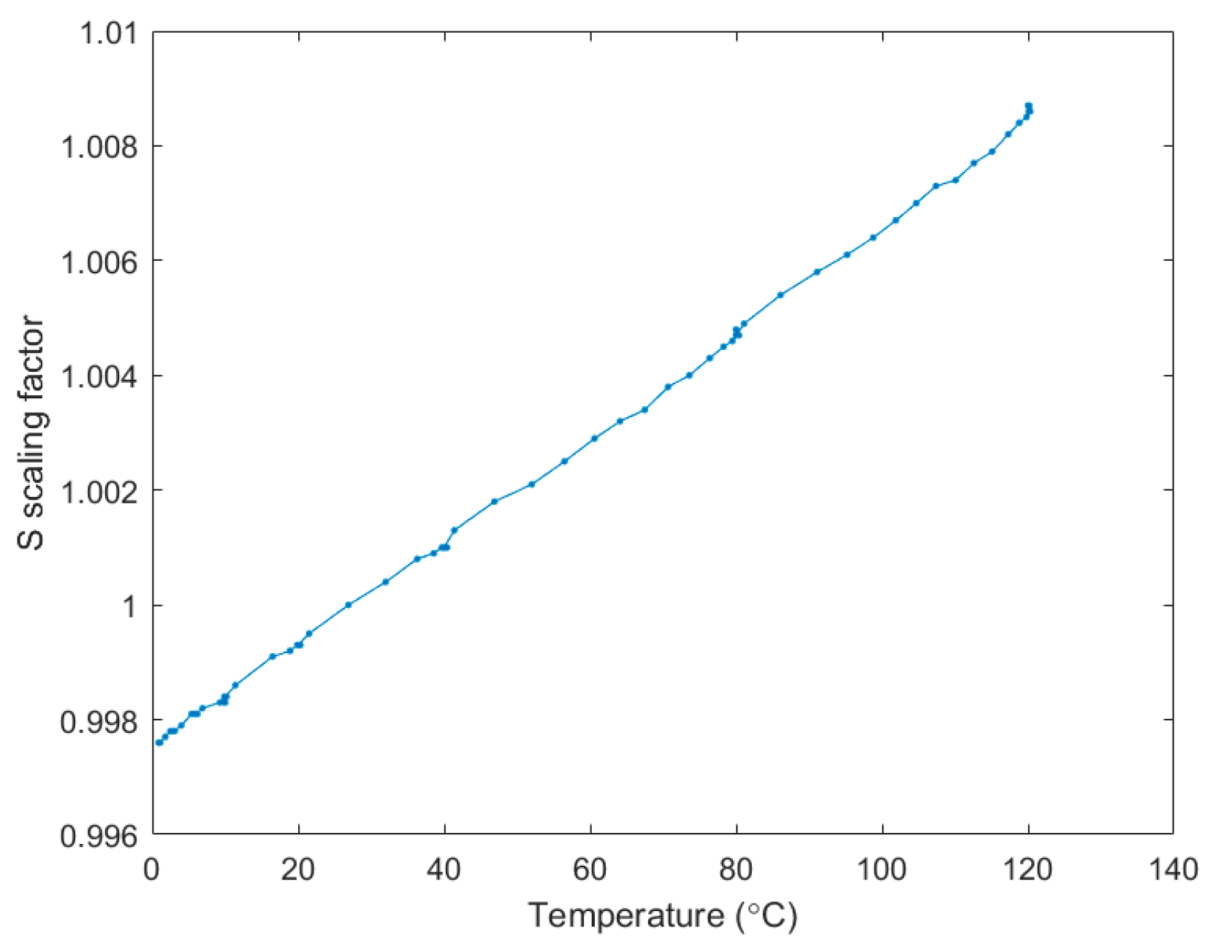
4. Fabrication and Implements
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Greve, D.W.; Chin, T.L.; Zheng, P.; Ohodnicki, P.; Baltrus, J.; Oppenheim, I.J. Surface Acoustic Wave Devices for Harsh Environment Wireless Sensing. Sensors 2013, 13, 6910–6935. [Google Scholar] [CrossRef] [PubMed]
- Springer, A.; Weigel, R.; Pohl, A.; Seifert, F. Wireless identification and sensing using surface acoustic wave devices. Mechatronics 1999, 9, 745–756. [Google Scholar] [CrossRef]
- Fachberger, R.; Bruckner, G.; Hauser, R.; Reindl, L. Wireless SAW based high-temperature measurement systems. In Proceedings of the IEEE International Frequency Control Symposium and Exposition, Miami, FL, USA, 4–7 June 2006; pp. 358–367. [Google Scholar]
- Hauser, R.; Fachberger, R.; Bruckner, G.; Smetana, W.; Reicher, R.; Stelzer, A.; Scheiblhofer, S.; Schuster, S. A wireless SAW-based temperature sensor for harsh environment. In Proceedings of the IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 860–863. [Google Scholar]
- Reindl, L. M.; Shrena, I.M. Wireless Measurement of Temperature Using Surface Acoustic Waves Sensors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1457–1463. [Google Scholar] [CrossRef] [PubMed]
- Binder, A.; Bruckner, G.; Schobernig, N.; Schmitt, D. Wireless surface acoustic wave pressure and temperature sensor with unique identification based on LiNbO3. IEEE Sens. J. 2013, 13, 1801–1805. [Google Scholar] [CrossRef]
- Bao, Z.; Hare, M.; Kuwano, H. Highly Sensitive Wireless Sensor Node Using Surface Acoustic Wave Devices for Structural Health Monitoring. Electron. Commun. Jpn. 2016, 99, 81–87. [Google Scholar] [CrossRef]
- Donohoe, B.; Geraghty, D.; O’Donnell, G.E. Wireless Calibration of a Surface Acoustic Wave Resonator as a Strain Sensor. Sens. J. IEEE 2011, 11, 1026–1032. [Google Scholar] [CrossRef]
- Ji, X.; Fan, Y.; Qi, H.; Chen, J.; Han, T.; Cai, P. A wireless demodulation system for passive surface acoustic wave torque sensor. Rev. Sci. Instrum. 2014, 85, 125001. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Yassine, O.; Kosel, J. A surface acoustic wave passive and wireless sensor for magnetic fields, temperature, and humidity. IEEE Sens. J. 2015, 15, 453–462. [Google Scholar] [CrossRef]
- Steele, A.R.; Belkerdid, M.A.; Struble, E. Passive Wireless Surface Acoustic Wave Sensors for Corrosion Monitoring of Steel in Concrete Structures. In Proceedings of the CORROSION 2015 NACE International, Dallas, TX, USA, 15–19 March 2015. [Google Scholar]
- Da Cunha, M.P.; Lad, R.J.; Moonlight, T.; Bernhardt, G.; Frankel, D.J. High temperature stability of langasite surface acoustic wave devices. In Proceedings of the IEEE Ultrason Symposium, Beijing, China, 2–5 November 2008; pp. 205–208. [Google Scholar]
- Polh, A. A review of wireless SAW sensors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 317–332. [Google Scholar] [PubMed]
- Barton, R.J.; Kennedy, T.F.; Williams, R.M.; Fink, P.W.; Ngo, P.H.; Ingle, R.R. Detection, identification, location, and remote sensing using SAW RFID sensor tags. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2010. [Google Scholar]
- Liu, B.; Zhang, C.; Ji, X.; Chen, J.; Han, T. An improved performance frequency estimation algorithm for passive wireless SAW resonant sensors. Sensors 2014, 14, 22261–22273. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Wen, Y. Design and fabrication of passive wireless sensor array system using composite coding resonant SAW transducer. Meas. Sci. Technol. 2006, 17, 441–449. [Google Scholar] [CrossRef]
- Gamba, P.; Goldoni, E.; Savazzi, P.; Arpesi, P.G.; Sopranzi, C.; Dufour, J.F.; Lavagna, M. Wireless passive sensors for remote sensing of temperature on aerospace platforms. IEEE Sens. J. 2014, 14, 3883–3892. [Google Scholar] [CrossRef]
- Plessky, V.; Reindl, L. Review on SAW RFID tags. Ultrason. Ferroelectr. Freq. Control. IEEE Trans. 2010, 57, 654–668. [Google Scholar] [CrossRef] [PubMed]
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, I. A Review of Wireless Sensor Technologies and Applications in Agriculture and Food Industry: State of the Art and Current Trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Networks 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B. D. Wireless sensor network localization techniques. Comput. Networks 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Lieberzeit, P.A.; Palfinger, C.; Dickert, F.L.; Fischerauer, G. SAW RFID-Tags for Mass-Sensitive Detection of Humidity and Vapors. Sensors 2009, 9, 9805–9815. [Google Scholar] [CrossRef] [PubMed]
- Reindl, L.; Ruile, W. Programmable reflectors for SAW-ID-tags. In Proceedings of the IEEE Ultrasonics Symposium, New York, NY, USA, 31 October–3 November 1993; pp. 125–130. [Google Scholar]
- Plessky, V.; Kondratiev, S.N.; Stierlin, R.; Nyffeler, F. SAW tags: new ideas. In Proceedings of the IEEE Ultrason Symposium, Seattle, WA, USA, 7–10 November 1995; pp. 117–120. [Google Scholar]
- Kang, A.; Zhang, C.; Ji, X.; Han, T.; Li, R.; Li, X. SAW-RFID enabled temperature sensor. Sens. Actuators A Phys. 2013, 201, 105–113. [Google Scholar] [CrossRef]
- Fachberger, R.; Bruckner, G.; Knoll, G.; Hauser, R.; Biniasch, J.; Reindl, L. Applicability of LiNbO/sub 3/, langasite and GaPO/sub 4/ in high temperature SAW sensors operating at radio frequencies. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2004, 51, 1427–1431. [Google Scholar] [CrossRef] [PubMed]
- Binder, A.; Bruckner, G.; Bardong, J. Passive SAW Based RFID Systems Finding their Way to Harsh Environment Applications. In Proceedings of the SENSORCOMM 2013, Barcelona, Spain, 26–31 August 2013; pp. 57–62. [Google Scholar]
- Wang, W.; Lee, K.; Kim, T.; Park, I.; Yang, S. A novel wireless, passive CO2 sensor incorporating a surface acoustic wave reflective delay line. Smart Mater. Struct. 2007, 16, 1382–1389. [Google Scholar] [CrossRef]
- Lim, C.; Wang, W.; Yang, S.; Lee, K. Development of SAW-based multi-gas sensor for simultaneous detection of CO2 and NO2. Sens. Actuators B Chem. 2011, 154, 9–16. [Google Scholar] [CrossRef]
- Sun, J.H.; Lin, C.C. Wireless SAW-Based Tags with Temperature Sensors that Utilize High-Resolution Delay-Time Measurements. J. Mech. 2016, 32, 435–440. [Google Scholar] [CrossRef]
- Buff, W.; Klctt, S.; Rusko, M.; Ehrenpfordt, J.; Goroll, M. Passive remote sensing for temperature and pressure using SAW resonator devices. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1388–1392. [Google Scholar] [CrossRef]
- Andle, J.C. Quartz Substrate Orientations for Compact Monolithic Differential Temperature Sensor, and Sensors Using Same. U.S. Patent 9,673,777, 6 June 2017. [Google Scholar]
- Malocha, D.C.; Puccio, D.; Gallagher, D. Orthogonal frequency coding for SAW device applications. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; pp. 1082–1085. [Google Scholar]
- Hartmann, C.S. A global SAW ID tag with large data capacity. In Proceedings of the IEEE Ultrason Symposium, Seattle, WA, USA, 8–11 October 2002. [Google Scholar]
- Bao, X.Q.; Burkhard, W.; Varadan, V.V.; Varadan, V.K. SAW Temperature Sensor and Remote Reading System. In Proceedings of the IEEE Ultrason Symposium, Denver, CO, USA, 14–16 October 1987; pp. 583–586. [Google Scholar]
- Kozlovski, N.Y.; Malocha, D.C. Multi-track low-loss SAW tags with flexible impedance matching for passive wireless sensor applications. In Proceedings of the IEEE International Frequency Control Symposium (FCS), Newport Beach, CA, USA, 1–4 June 2010; pp. 279–286. [Google Scholar]
- Bulst, W.E.; Fischerauer, G.; Reindl, L. State of the art in wireless sensing with surface acoustic waves. Ind. Electron. IEEE Trans. 2001, 48, 265–271. [Google Scholar] [CrossRef]
- Lehtonen, S.; Plessky, V.P.; Hartmann, C.S.; Salomaa, M.M. SPUDT filters for the 2.45 GHz ISM band. Ultrason. Ferroelectr. Freq. Control. IEEE Trans. 2004, 51, 1697–1703. [Google Scholar] [CrossRef]
- Fu, C.; Quan, A.J.; Luo, J.T.; Pang, H.F.; Guo, Y.J.; Wu, Q.; Ng, W.P.; Zu, X.T.; Fu, Y.Q. Vertical jetting induced by shear horizontal leaky surface acoustic wave on 36° Y-X LiTaO3. Appl. Phys. Lett. 2017, 110, 3585–3626. [Google Scholar] [CrossRef]
- Weiss, L.G. Wavelets and wideband correlation processing. IEEE Signal Process. Mag. 1994, 11, 13–32. [Google Scholar] [CrossRef]
- Morgan, D. Surface Acoustic Wave Filters: With Applications to Electronic Communications and Signal Processing; Academic Press: Cambridge, MA, USA, 2007. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position (µm) | Number of Fingers | |
|---|---|---|
| 1st | 1755 | 4 |
| 2nd | 1805 | 5 |
| 3rd | 1855 | 5 |
| 4th | 1905 | 5 |
| 5th | 1955 | 7 |
| 6th | 2005 | 8 |
| 7th | 2055 | 9 |
| 8th | 2105 | 11 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.; Ke, Y.; Li, M.; Luo, J.; Li, H.; Liang, G.; Fan, P. Design and Implementation of 2.45 GHz Passive SAW Temperature Sensors with BPSK Coded RFID Configuration. Sensors 2017, 17, 1849. https://doi.org/10.3390/s17081849
Fu C, Ke Y, Li M, Luo J, Li H, Liang G, Fan P. Design and Implementation of 2.45 GHz Passive SAW Temperature Sensors with BPSK Coded RFID Configuration. Sensors. 2017; 17(8):1849. https://doi.org/10.3390/s17081849
Chicago/Turabian StyleFu, Chen, Yabing Ke, Min Li, Jingting Luo, Honglang Li, Guangxing Liang, and Ping Fan. 2017. "Design and Implementation of 2.45 GHz Passive SAW Temperature Sensors with BPSK Coded RFID Configuration" Sensors 17, no. 8: 1849. https://doi.org/10.3390/s17081849
APA StyleFu, C., Ke, Y., Li, M., Luo, J., Li, H., Liang, G., & Fan, P. (2017). Design and Implementation of 2.45 GHz Passive SAW Temperature Sensors with BPSK Coded RFID Configuration. Sensors, 17(8), 1849. https://doi.org/10.3390/s17081849