Development of the MOOSY4 eNose IoT for Sulphur-Based VOC Water Pollution Detection


Abstract
:1. Introduction
2. Materials and Methods
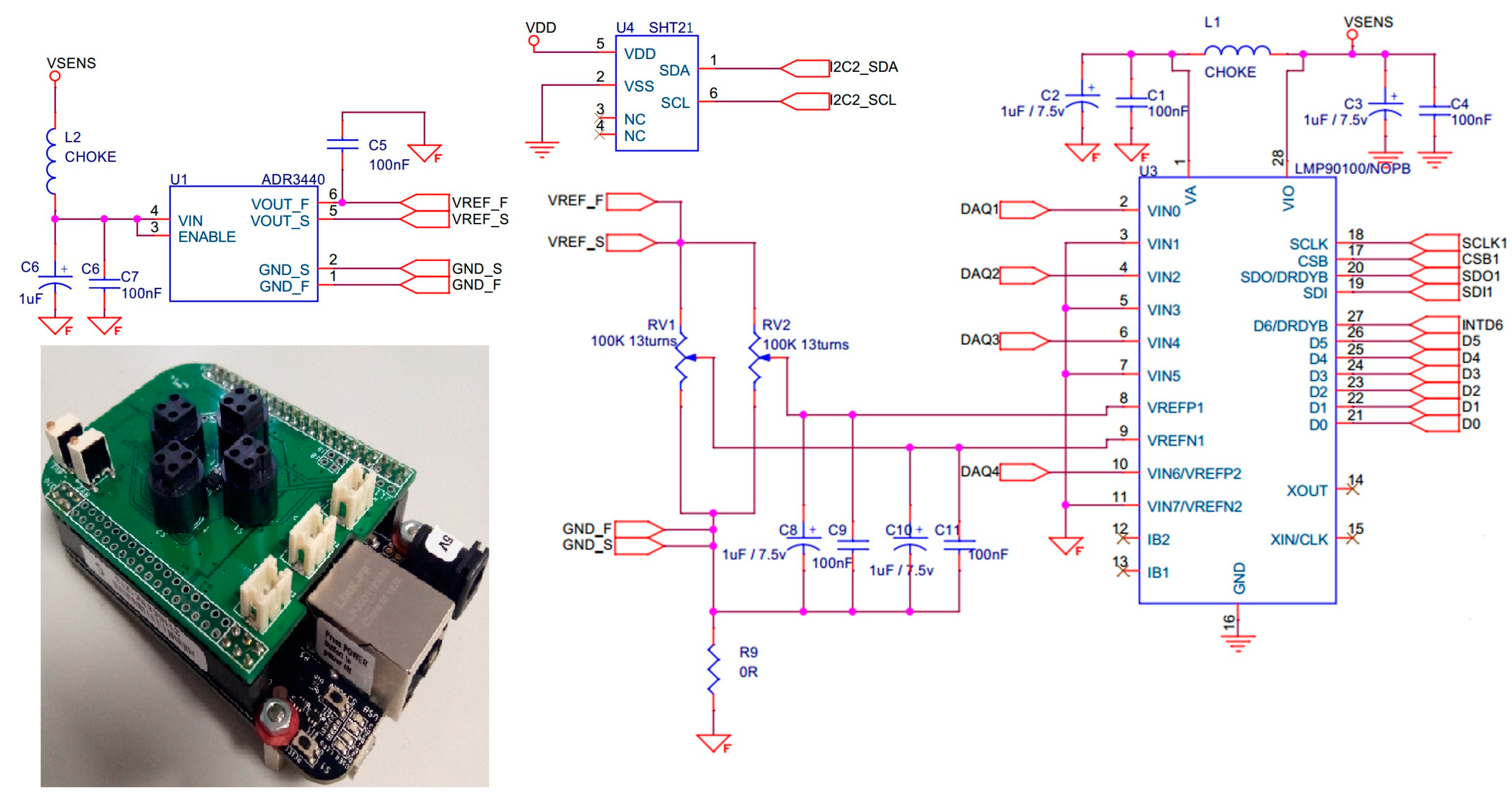
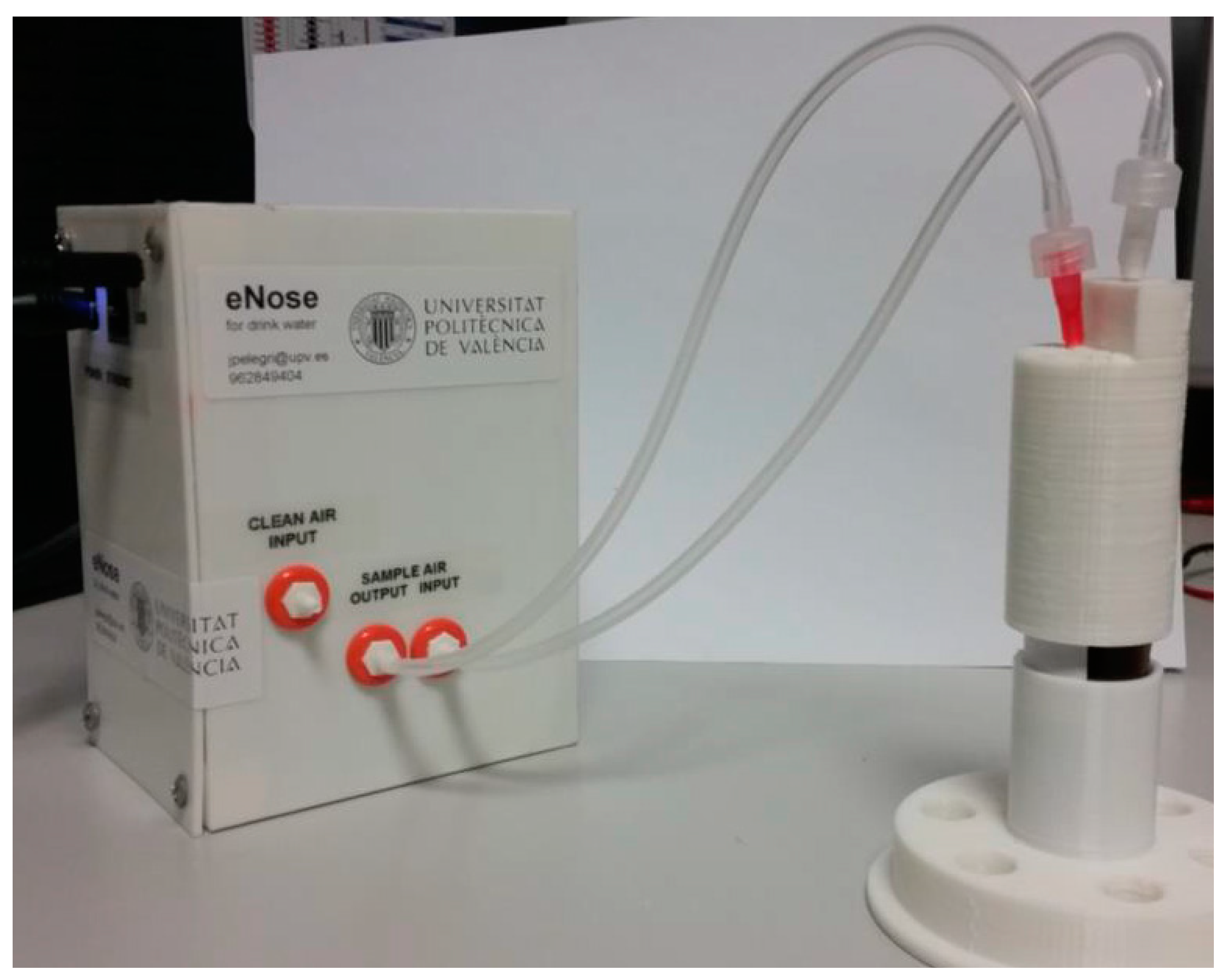
2.1. Data Acquisition
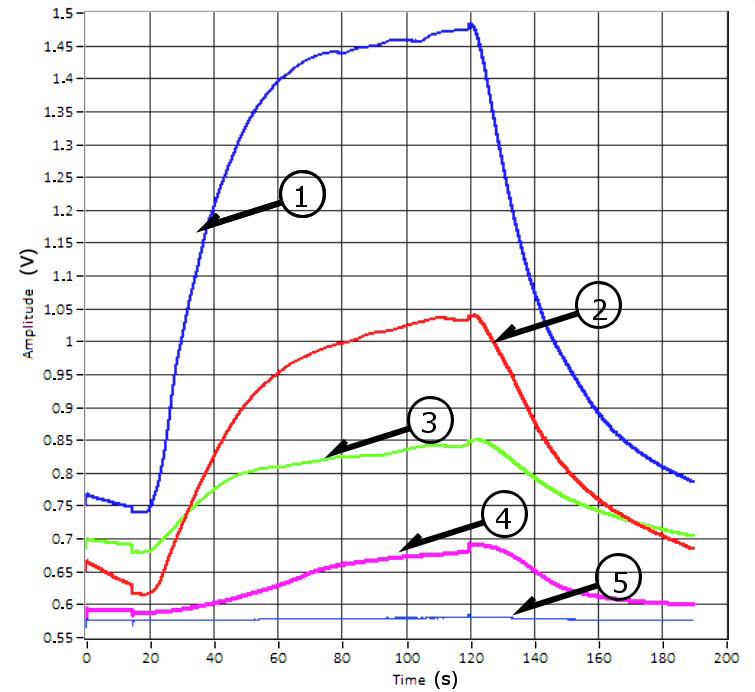
2.2. Experiment Description and Data Processing
Data Processing
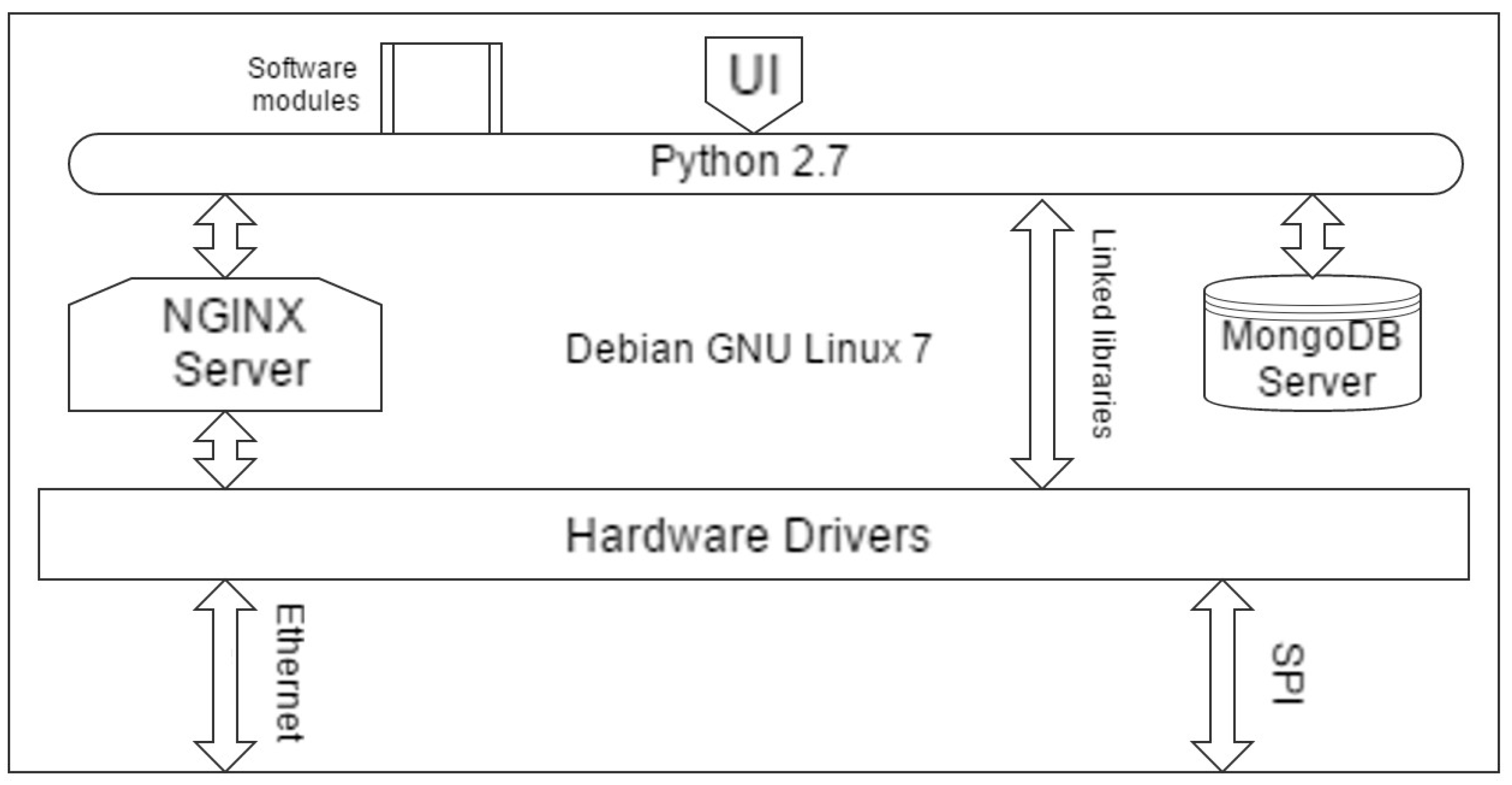
2.3. Modular Platform of the MOOSY4 IoT
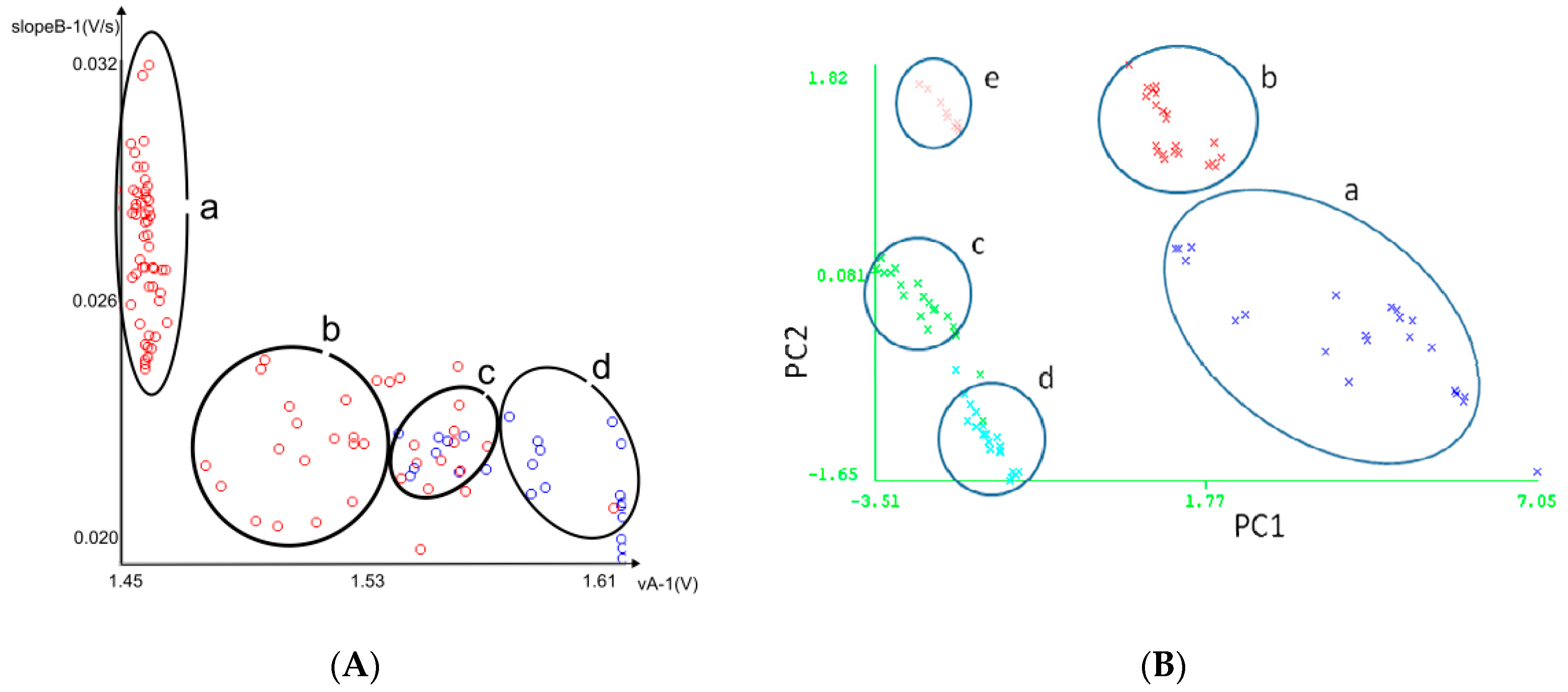
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| NOSE | Electronic nose. |
| MOS | Metal oxide semiconductors. |
| MOOSY4 | Multi-sensory odor olfactory system with 4 sensors. |
| MOOSY32 | Multi-sensory odor olfactory system with 32 sensors. |
| ECG | Electrocardiography |
| EEG | Electroencephalogram |
| EMG | Electromyogram |
| LP gas | Liquefied petroleum gas. |
| OSI model | Model of architecture for open systems interconnection. |
| BBB | Beagle bone black. |
| ARM | Advanced RISC machines. |
| Weka | Waikato environment for knowledge analysis. |
| NNA | Nearest neighbour algorithm. |
| MLP | Multilayer perceptron. |
| GVA | Valencian government from Spain. |
References
- Evans, D. The internet of things: How the next evolution of the internet is changing everything. CISCO White Pap. 2011, 1, 1–11. [Google Scholar]
- Babovic, Z.B.; Protic, J.; Milutinovic, V. Web performance evaluation for internet of things applications. IEEE Access 2016, 4, 6974–6992. [Google Scholar] [CrossRef]
- Lu, T.C.; Huang, L.R.; Lee, Y.; Tsai, K.J.; Liao, Y.T.; Cheng, N.C.; Chu, Y.-H.; Tsai, Y.H.; Chen, F.C.; Chiueh, T.C. Wireless sensor nodes for environmental monitoring in Internet of Things. In Proceedings of the IEEE ACM/EDA Design Automation Conference, New York, NY, USA, 5–9 June 2016. [Google Scholar]
- Smart Citizen Kit. Getting Started. Available online: https://docs.smartcitizen.me/#/start/detailed-specifications (accessed on 11 August 2017).
- Lian, Y. Challenges in the design of self-powered wearable wireless sensors for healthcare Internet-of-Things. In Proceedings of the IEEE 11th International Conference on ASIC, Chengdu, China, 3–6 November 2015. [Google Scholar]
- Xu, L.D.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Inf. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Huang, J.; Meng, Y.; Gong, X.; Liu, Y.; Duan, Q. A novel deployment scheme for green internet of things. IEEE Int. Things J. 2014, 1, 196–205. [Google Scholar] [CrossRef]
- Gardner, J.W.; Bartlett, P.N. A brief history of electronic noses. Sens. Actuators B Chem. 1994, 18–19, 211–220. [Google Scholar] [CrossRef]
- Gardner, J.W.; Bartlett, P.N. Performance definition and standardization of electronic noses. Sens. Actuators B Chem. 1996, 33, 60–67. [Google Scholar] [CrossRef]
- Gardner, J.W.; Bartlett, P.N. Electronic Noses: Principles and Applications; Oxford University Press: New York, NY, USA, 1999; Volume 233. [Google Scholar]
- Chemical Sensors. Expanding the Vision of Sensor Materials; National Academy Press: Washington, DC, USA, 1995. [Google Scholar]
- Wilson, A.D.; Baietto, M. Applications and advances in electronic-nose technologies. Sensors 2009, 9, 5099–5148. [Google Scholar] [CrossRef] [PubMed]
- Jia, X.-M.; Meng, Q.-H.; Jing, Y.-Q.; Qi, P.-F.; Zeng, M.; Ma, S.-G. A new method combining KECA-LDA with ELM for classification of Chinese liquors using electronic nose. IEEE Sens. J. 2016, 16, 8010–8017. [Google Scholar] [CrossRef]
- Sreelatha, M.; Nasira, G.M.; Thangamani, P. Pattern recognition for toxic gases based on electronic nose using artificial neural networks. In Proceedings of the IEEE International Conference on Computing for Sustainable Global Development, New Delhi, India, 16–18 March 2016; pp. 3075–3079. [Google Scholar]
- Benabdellah, N.; Bourhaleb, M.; Nasri, M.; Benazzi, N.; Dahbi, S. Design of temperature and humidity sensors for an electronic nose used in rotten food. In Proceedings of the International Conference on Electrical and Information Technologies, Tangiers, Morocco, 4–7 May 2016. [Google Scholar]
- Jing, Y.; Meng, Q.-H.; Qi, P.F.; Cao, M.L.; Zeng, M.; Ma, S.-G. A bioinspired neural network for data processing in an electronic nose. IEEE Trans. Instrum. Meas. 2016, 65, 2369–2380. [Google Scholar] [CrossRef]
- Kanakam, P.; Hussain, S.M.; Chakravarthy, A.S.N. Electronic noses: Forestalling fire disasters. In Proceedings of the IEEE International Conference on Computational Intelligence and Computing Research, Madurai, India, 10–12 December 2015. [Google Scholar]
- Fine, G.F.; Cavanagh, L.M.; Afonja, A.; Binions, R. Metal oxide semi-conductor gas sensors in environmental monitoring. Sensors 2010, 10, 5469–5502. [Google Scholar] [CrossRef] [PubMed]
- Santra, S.; Guha, P.K.; Ali, S.Z.; Hiralal, P.; Covington, J.A.; Amaratunga, G.A.J.; Milne, W.I.; Gardner, J.W.; Udrea, F. ZnO nanowires grown on SOI CMOS substrate for ethanol sensing. Sens. Actuators B Chem. 2010, 146, 559–565. [Google Scholar] [CrossRef]
- Wilson, A.D. Diverse applications of electronic-nose technologies in agriculture and forestry. Sensors 2013, 13, 2295–2348. [Google Scholar] [CrossRef] [PubMed]
- Lorwongtragool, P.; Sowade, E.; Watthanawisuth, N.; Baumann, R.R.; Kerdcharoen, T. A novel wearable electronic nose for healthcare based on flexible printed chemical sensor array. Sensors 2014, 14, 19700–19712. [Google Scholar] [CrossRef] [PubMed]
- Son, M.; Cho, D.G.; Lim, J.H.; Park, J.; Hong, S.; Ko, H.J.; Park, T.H. Real-time monitoring of geosmin and 2-methylisoborneol, representative odor compounds in water pollution using bioelectronic nose human-like performance. Biosens. Bioelectron. 2015, 74, 199–206. [Google Scholar] [CrossRef] [PubMed]
- Gardner, J.W.; Shin, H.W.; Hines, E.L.; Dow, C.S. An electronic nose system for monitoring the potable water. Sens. Actuators B Chem. 2000, 69, 336–341. [Google Scholar] [CrossRef]
- Nayak, K.; Supreetha, B.S.; Deccaraman, M.; Nayak, V. E-Nose System to Detect E-Coli in Drinking Water of Udupi District. Int. J. Eng. Res. Dev. 2012, 1, 58–64. [Google Scholar]
- Goschnick, I.J.; Koronczi, I.; Frietsch, M.; Kiselev, I. Water pollution recognition with the electronic nose KAMINA. Sens. Actuators B Chem. 2005, 106, 182–186. [Google Scholar] [CrossRef]
- Guadayol, M.; Cortina, M.; Guadayol, J.M.; Caixach, J. Determination of dimethyl selenide and dimethyl sulphide compounds causing off-flavours in bottled mineral waters. Water Res. 2016, 92, 149–155. [Google Scholar] [CrossRef] [PubMed]
- Wilson, A.D. Review of electronic-nose technologies and algorithms to detect hazardous chemicals in the environment. Proced. Technol. 2012, 1, 453–463. [Google Scholar] [CrossRef]
- Becher, C.; Kaul, P.; Mitrovics, J.; Warmer, J. The detection of evaporating hazardous material released from moving sources using a gas sensor network. Sens. Actuators B Chem. 2010, 146, 513–520. [Google Scholar] [CrossRef]
- Sanchez-Garrido, C.; Monroy, J.; Gonzalez-Jimenez, J. A configurable smart E-Nose for Spatio-Temporal olfactory analysis. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1968–1971. [Google Scholar]
- Olarte, O.; Chilo, J.; Pelegri-Sebastia, J.; Barbé, K.; van Moer, W. Glucose detection in human sweat using an electronic nose. In Proceedings of the International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 1462–1465. [Google Scholar]
- Monsonís, I.J.; Pelegri-Sebastia, J.; Sogorb, T.; Llario, V.; Estruch, V.D. A method for obtaining mathematical models from graphics in chemical sensors. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1807–1810. [Google Scholar]
- Hall, M.A. Correlation-Based Feature Selection for Machine Learning. Ph.D. Thesis, University of Waikato, Hamilton, NewZealand, April 1999. [Google Scholar]
- Holmes, G.; Donkin, A.; Witten, I. WEKA: A machine learning workbench. In Proceedings of the ANZIIS Australian New Zealand Intelligent Information Systems Conference, Brisbane, Australia, 29 November–2 December 1994; pp. 357–361. [Google Scholar]
- Berrueta, L.A.; Alonso-Salces, R.M.; Héberge, K. Supervised pattern recognition in food analysis. J. Chromatogr. A 2007, 1158, 196–214. [Google Scholar] [CrossRef] [PubMed]
- Lajara, R.J.; Perez-Solano, J.J.; Pelegri-Sebastia, J. A method for modeling the battery state of charge in wireless sensor networks. IEEE Sens. J. 2015, 15, 1186–1197. [Google Scholar] [CrossRef]
- Batista, B.L.; Silva, L.R.S.; Rocha, B.A.; Rodrigues, J.L.; Beretta-Silva, A.A.; Bonates, T.O.; Gomes, V.S.D.; Barbosa, R.M.; Barbosa, F. Multi-element determination in Brazilian honey samples by inductively coupled plasma mass spectrometry and estimation of geographic origin with data mining techniques. Food Res. Int. 2012, 49, 209–215. [Google Scholar] [CrossRef]
- Patil, T.R.; Sherekar, S.S. Performance analysis of Naïve Bayes and J48classification algorithm for data classification. Int. J. Comput. Sci. Appl. 2013, 6, 256–261. [Google Scholar]
- Benedetti, S.; Mannino, S.; Sabatini, G.; Marcazzan, G.L. Electronic nose and neural network use for the classification of honey. Apidologie 2004, 35, 1–6. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | VOC Gases | ppb |
|---|---|---|
| 1 | Dimethyl disulphide (C2H6S2) | 100 |
| 2 | Dimethyl trisulphide (C2H6S3) | 100 |
| 3 | Dimethyl diselenide (C2H6Se2) | 100 |
| 4 | Odor sulphur (unknown) | - |
| 5 | Commercial water | - |
| Sensors | Model | Target GAS | DetectionRange |
|---|---|---|---|
| 1 | TGS2600 | H2 and alcohol (Air contaminants) | 1–30 ppm |
| 1 | TGS2610-c00 | Liquefiedpetroleum gas | 500–10,000 ppm |
| 1 | TGS2611 | Methane | 500–10,000 ppm |
| 1 | TGS2620 | Alcohol, solvents, vapour | 500–5000 ppm |
| Cross Validation 90% (N =) | Cross Validation 66% (N =) | |||
|---|---|---|---|---|
| Algorithm | Correctly Classified | Incorrectly Classified | Correctly Classified | Incorrectly Classified |
| NNA | 83.23% (134) | 16.77% (27) | 76.36% (42) | 26.64% (13) |
| MLP | 85.71% (138) | 14.29% (23) | 83.63% (46) | 16.36% (9) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Climent, E.; Pelegri-Sebastia, J.; Sogorb, T.; Talens, J.B.; Chilo, J. Development of the MOOSY4 eNose IoT for Sulphur-Based VOC Water Pollution Detection. Sensors 2017, 17, 1917. https://doi.org/10.3390/s17081917
Climent E, Pelegri-Sebastia J, Sogorb T, Talens JB, Chilo J. Development of the MOOSY4 eNose IoT for Sulphur-Based VOC Water Pollution Detection. Sensors. 2017; 17(8):1917. https://doi.org/10.3390/s17081917
Chicago/Turabian StyleCliment, Enric, Jose Pelegri-Sebastia, Tomas Sogorb, J. B. Talens, and Jose Chilo. 2017. "Development of the MOOSY4 eNose IoT for Sulphur-Based VOC Water Pollution Detection" Sensors 17, no. 8: 1917. https://doi.org/10.3390/s17081917
APA StyleCliment, E., Pelegri-Sebastia, J., Sogorb, T., Talens, J. B., & Chilo, J. (2017). Development of the MOOSY4 eNose IoT for Sulphur-Based VOC Water Pollution Detection. Sensors, 17(8), 1917. https://doi.org/10.3390/s17081917