Holey-Cavity-Based Compressive Sensing for Ultrasound Imaging

 ,
,
Abstract
:1. Introduction
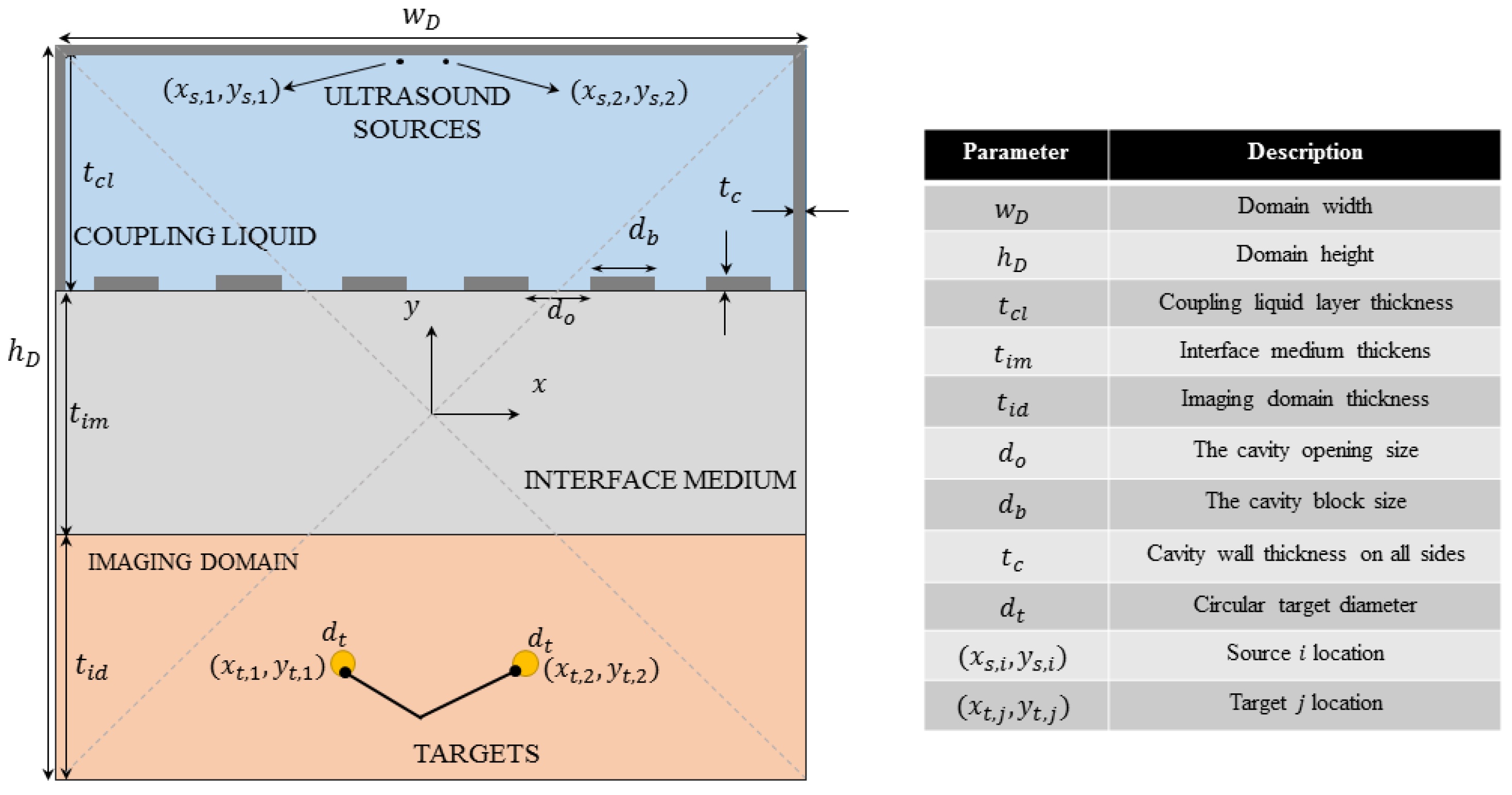
2. Two-Dimensional Cavity
3. Compressive Sensing, Imaging and Performance Metrics
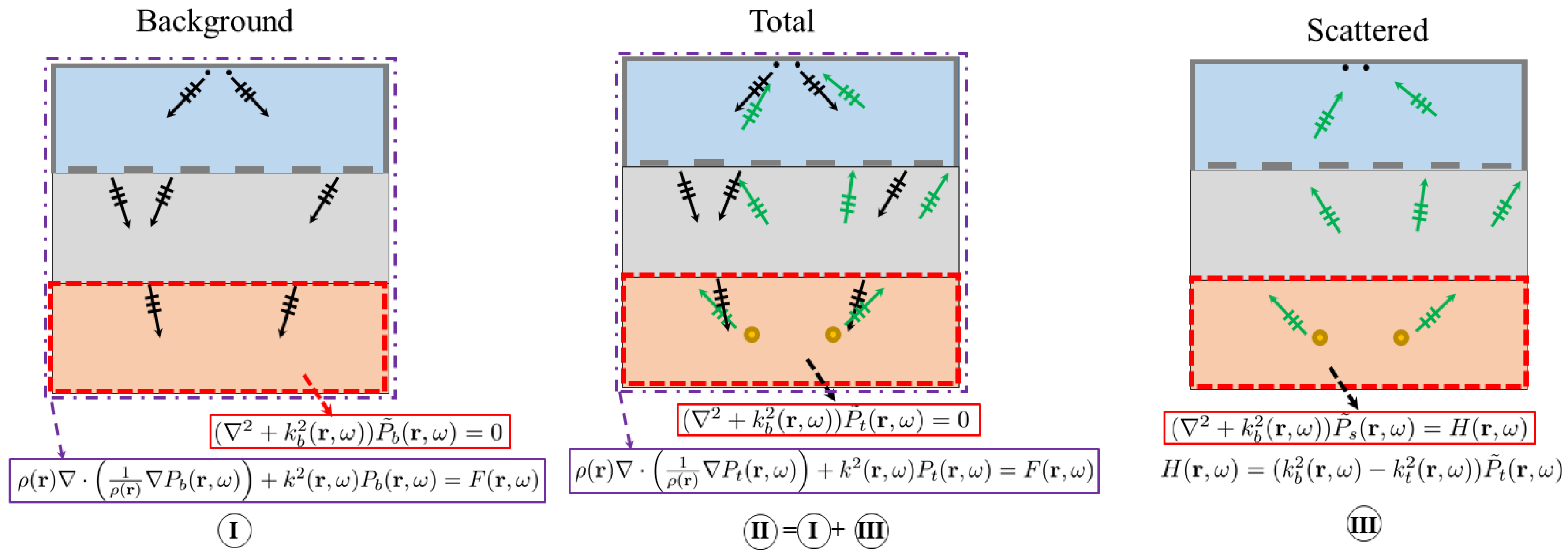
3.1. The Forward Model
3.2. The Inverse Model
3.3. Distributed Compressive Sensing and Imaging Algorithm
| Algorithm 1 Consensus ADMM. | |
| Inputs: | |
| sensing matrix | |
| measurement vector | |
| ← maximum number of iterations | |
| number of rows divisions | |
| augmented Lagrangian parameter | |
| norm-one regularization parameter | |
| Initialize | ▹ Initialization |
| Compute the inverse factor for | |
| iteration number | |
| repeat | |
| for | ▹ Update |
| ▹ Mean of | |
| ▹ Mean of | |
| ▹ Update | |
| for | ▹ Update |
| ▹ Increment k | |
| until | ▹ Check for convergence |
| Output: | |
3.4. Beam Focusing
3.5. Sensing Capacity
4. Simulation Results and Discussion
4.1. The Effect of the Cavity Design on Sensing Capacity
4.1.1. The Size of the Openings
4.1.2. Material Selection
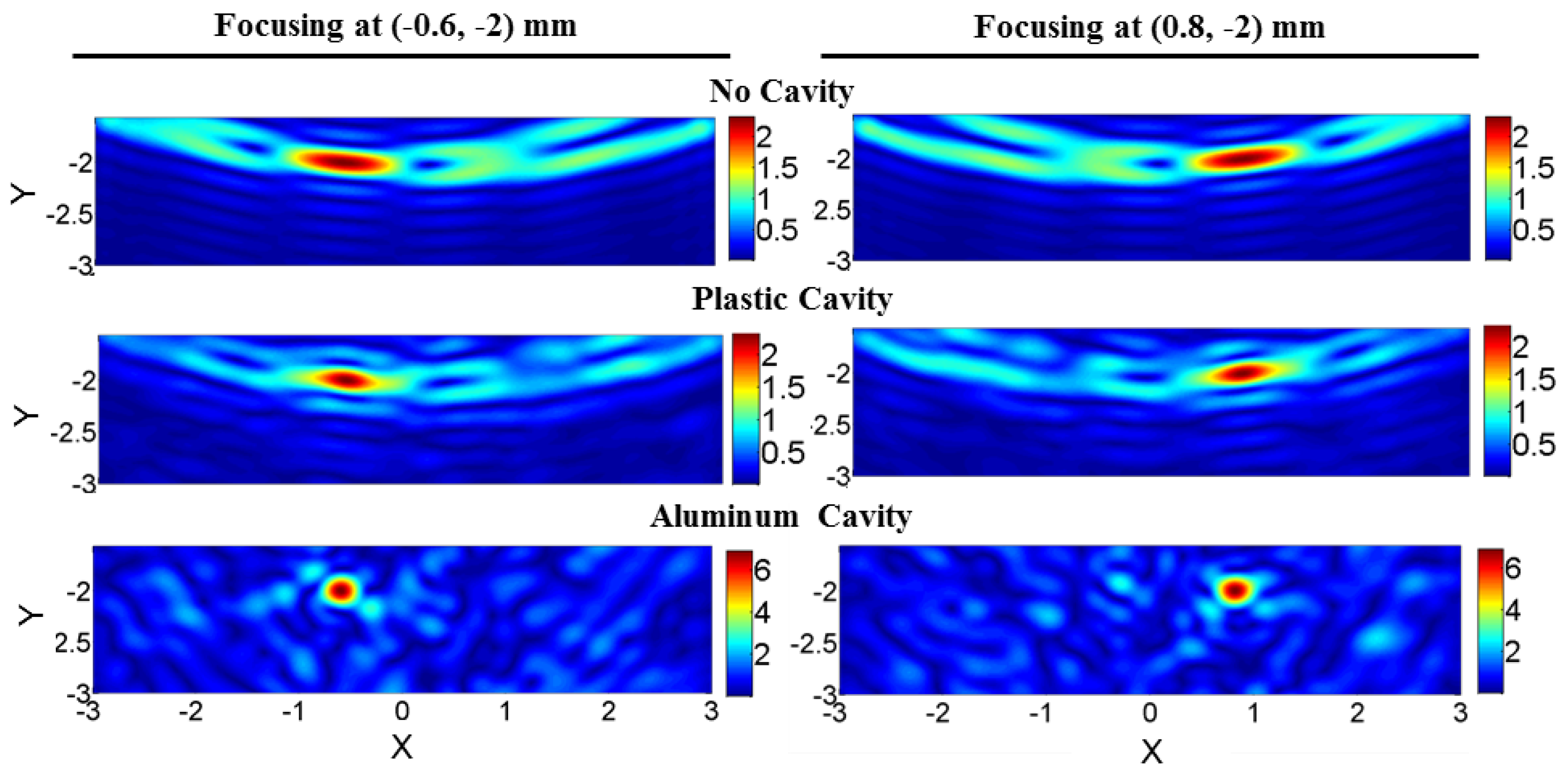
4.2. The Effect of the Cavity on Imaging and Point Spread Function
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| CS | Compressive Sensing |
| Signal-to-Noise Ratio | |
| ADMM | Alternating Direction Method of Multipliers |
| PSF | Point Spread Function |
Appendix A
References
- Baraniuk, R.G. Compressive sensing [lecture notes]. IEEE Signal Process. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Candes, E.; Romberg, J. Sparsity and incoherence in compressive sampling. Inverse Probl. 2007, 23, 969. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Qaisar, S.; Bilal, R.M.; Iqbal, W.; Naureen, M.; Lee, S. Compressive sensing: From theory to applications, a survey. J. Commun. Netw. 2013, 15, 443–456. [Google Scholar] [CrossRef]
- Carin, L.; Liu, D.; Guo, B. Coherence, compressive sensing, and random sensor arrays. IEEE Antennas Propag. Mag. 2011, 53, 28–39. [Google Scholar] [CrossRef]
- Fromenteze, T.; Yurduseven, O.; Imani, M.F.; Gollub, J.; Decroze, C.; Carsenat, D.; Smith, D.R. Computational imaging using a mode-mixing cavity at microwave frequencies. Appl. Phys. Lett. 2015, 106, 194104. [Google Scholar] [CrossRef]
- Yurduseven, O.; Gowda, V.R.; Gollub, J.N.; Smith, D.R. Printed aperiodic cavity for computational and microwave imaging. IEEE Microw. Wirel. Compon. Lett. 2016, 26, 367–369. [Google Scholar] [CrossRef]
- Hunt, J.; Driscoll, T.; Mrozack, A.; Lipworth, G.; Reynolds, M.; Brady, D.; Smith, D.R. Metamaterial apertures for computational imaging. Science 2013, 339, 310–313. [Google Scholar] [CrossRef] [PubMed]
- Hunt, J.; Gollub, J.; Driscoll, T.; Lipworth, G.; Mrozack, A.; Reynolds, M.S.; Brady, D.J.; Smith, D.R. Metamaterial microwave holographic imaging system. JOSA A 2014, 31, 2109–2119. [Google Scholar] [CrossRef] [PubMed]
- Lipworth, G.; Mrozack, A.; Hunt, J.; Marks, D.L.; Driscoll, T.; Brady, D.; Smith, D.R. Metamaterial apertures for coherent computational imaging on the physical layer. JOSA A 2013, 30, 1603–1612. [Google Scholar] [CrossRef] [PubMed]
- Watts, C.M.; Shrekenhamer, D.; Montoya, J.; Lipworth, G.; Hunt, J.; Sleasman, T.; Krishna, S.; Smith, D.R.; Padilla, W.J. Terahertz compressive imaging with metamaterial spatial light modulators. Nat. Photonics 2014, 8, 605–609. [Google Scholar] [CrossRef]
- Liutkus, A.; Martina, D.; Popoff, S.; Chardon, G.; Katz, O.; Lerosey, G.; Gigan, S.; Daudet, L.; Carron, I. Imaging with nature: Compressive imaging using a multiply scattering medium. Sci. Rep. 2014, 4, 5552. [Google Scholar] [CrossRef] [PubMed]
- Molaei, A.; Juesas, J.H.; Lorenzo, J.A.M. Compressive Reflector Antenna Phased Array. In Antenna Arrays and Beam-Formation; InTech: London, UK, 2017. [Google Scholar]
- Molaei, A.; Juesas, J.H.; Westwood, A.; Somu, S.; Martinez-Lorenzo, J. A bilayer ELC metamaterial for multi-resonant spectral coding at mm-Wave frequencies. In Proceedings of the 2017 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, San Diego, CA, USA, 9–14 July 2017; pp. 469–470. [Google Scholar]
- Molaei, A.; Juesas, J.H.; Allan, G.; Martinez-Lorenzo, J. Active imaging using a metamaterial-based compressive reflector antenna. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, Puerto Rico, 26 June–1 July 2016; pp. 1933–1934. [Google Scholar]
- Molaei, A.; Heredia-Juesas, J.; Martinez-Lorenzo, J. A 2-bit and 3-bit metamaterial absorber-based compressive reflector antenna for high sensing capacity imaging. In Proceedings of the 2017 IEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 25–26 April 2017; pp. 1–6. [Google Scholar]
- Xie, Y.; Tsai, T.H.; Konneker, A.; Popa, B.I.; Brady, D.J.; Cummer, S.A. Single-sensor multispeaker listening with acoustic metamaterials. Proc. Natl. Acad. Sci. USA 2015, 112, 10595–10598. [Google Scholar] [CrossRef] [PubMed]
- Schiffner, M.F.; Schmitz, G. Fast compressive pulse-echo ultrasound imaging using random incident sound fields. J. Acoust. Soc. Am. 2017, 141, 3611. [Google Scholar] [CrossRef]
- Schiffner, M.F. Random incident sound waves for fast compressed pulse-echo ultrasound imaging. arXiv 2017, arXiv:1801.00205. [Google Scholar]
- Mishali, M.; Eldar, Y.C.; Elron, A.J. Xampling: Signal acquisition and processing in union of subspaces. IEEE Trans. Signal Process. 2011, 59, 4719–4734. [Google Scholar] [CrossRef]
- Quinsac, C.; Basarab, A.; Kouamé, D. Frequency domain compressive sampling for ultrasound imaging. Adv. Acoust. Vib. 2012, 2012, 231317. [Google Scholar] [CrossRef]
- Rawat, N.; Hwang, I.C.; Shi, Y.; Lee, B.G. Optical image encryption via photon-counting imaging and compressive sensing based ptychography. J. Opt. 2015, 17, 065704. [Google Scholar] [CrossRef]
- Spencer, A.P.; Spokoyny, B.; Ray, S.; Sarvari, F.; Harel, E. Mapping multidimensional electronic structure and ultrafast dynamics with single-element detection and compressive sensing. Nat. Commun. 2016, 7, 10434. [Google Scholar] [CrossRef] [PubMed]
- Ma, R.; Hu, F.; Hao, Q. Active Compressive Sensing via Pyroelectric Infrared Sensor for Human Situation Recognition. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 3340–3350. [Google Scholar] [CrossRef]
- Kruizinga, P.; van der Meulen, P.; Fedjajevs, A.; Mastik, F.; Springeling, G.; de Jong, N.; Bosch, J.G.; Leus, G. Compressive 3D ultrasound imaging using a single sensor. Sci. Adv. 2017, 3, e1701423. [Google Scholar] [CrossRef] [PubMed]
- Draeger, C.; Fink, M. One-channel time reversal of elastic waves in a chaotic 2D-silicon cavity. Phys. Rev. Lett. 1997, 79, 407. [Google Scholar] [CrossRef]
- Draeger, C.; Aime, J.C.; Fink, M. One-channel time-reversal in chaotic cavities: Experimental results. J. Acoust. Soc. Am. 1999, 105, 618–625. [Google Scholar] [CrossRef]
- Quieffin, N.; Catheline, S.; Ing, R.K.; Fink, M. Real-time focusing using an ultrasonic one channel time-reversal mirror coupled to a solid cavity. J. Acoust. Soc. Am. 2004, 115, 1955–1960. [Google Scholar] [CrossRef]
- Etaix, N.; Fink, M.; Ing, R.K. Acoustic imaging device with one transducer. J. Acoust. Soc. Am. 2012, 131, EL395–EL399. [Google Scholar] [CrossRef] [PubMed]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer Science & Business Media: Berlin, Germany, 2000. [Google Scholar]
- COMSOL Multiphysics. COMSOL Multiphysics Acoustic Module—User’s Guide; COMSOL Multiphysics: Stockholm, Sweden, 2013. [Google Scholar]
- Popa, B.I.; Cummer, S.A. Design and characterization of broadband acoustic composite metamaterials. Phys. Rev. B 2009, 80, 174303. [Google Scholar] [CrossRef]
- Obermeier, R. Compressed Sensing Algorithms for Electromagnetic Imaging Applications. Ph.D. Thesis, Northeastern University, Boston, MA, USA, 2016. [Google Scholar]
- Zimmer, M.; Bibee, L.; Richardson, M. Frequency Dependent Sound Speed and Attenuation Measurements in Seafloor Sands from 1 to 400 kHz; Technical Report; Naval Research Laboratory Stennis Space Center Ms Marine Geosciences Division: Hancock, MS, USA, 2005. [Google Scholar]
- Obermeier, R.; Juesas, J.H.; Martinez-Lorenzo, J.A. Imaging breast cancer in a hybrid DBT/NRI system using compressive sensing. In Proceedings of the 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015; pp. 392–393. [Google Scholar]
- Poli, L.; Oliveri, G.; Massa, A. Microwave imaging within the first-order Born approximation by means of the contrast-field Bayesian compressive sensing. IEEE Trans. Antennas Propag. 2012, 60, 2865–2879. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Juesas, J.H.; Allan, G.; Molaei, A.; Tirado, L.; Blackwell, W.; Lorenzo, J.A.M. Consensus-based imaging using admm for a compressive reflector antenna. In Proceedings of the 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015; pp. 1304–1305. [Google Scholar]
- Heredia-Juesas, J.; Molaei, A.; Tirado, L.; Blackwell, W.; Martínez-Lorenzo, J.Á. Norm-1 regularized consensus-based admm for imaging with a compressive antenna. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2362–2365. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Ahmed, S.S.; Schiessl, A.; Schmidt, L.P. Multistatic mm-wave imaging with planar 2D-arrays. In Proceedings of the 2009 German Microwave Conference, Munich, Germany, 16–18 March 2009; pp. 1–4. [Google Scholar]
- Lorenzo, J.A.M.; Juesas, J.H.; Blackwell, W. A single-transceiver compressive reflector antenna for high-sensing-capacity imaging. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 968–971. [Google Scholar] [CrossRef]
- Carlson, J.; Van Deventer, J.; Scolan, A.; Carlander, C. Frequency and temperature dependence of acoustic properties of polymers used in pulse-echo systems. In Proceedings of the 2003 IEEE Symposium on Ultrasonics, Honolulu, HI, USA, 5–8 October 2003; Volume 1, pp. 885–888. [Google Scholar]
- Martin, J. Materials for Engineering; Woodhead Publishing: Cambridge, UK, 2006. [Google Scholar]
- Wittek, A.; Joldes, G.; Nielsen, P.M.; Doyle, B.J.; Miller, K. Computational Biomechanics for Medicine: From Algorithms to Models and Applications; Springer: New York, NY, USA, 2017. [Google Scholar]
- Malik, B.; Klock, J.; Wiskin, J.; Lenox, M. Objective breast tissue image classification using Quantitative Transmission ultrasound tomography. Sci. Rep. 2016, 6, 38857. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Duric, N.; Littrup, P.; Huang, L. In vivo breast sound-speed imaging with ultrasound tomography. Ultrasound Med. Biol. 2009, 35, 1615–1628. [Google Scholar] [CrossRef] [PubMed]
- Youk, J.H.; Son, E.J.; Park, A.Y.; Kim, J.A. Shear-wave elastography for breast masses: local shear wave speed (m/sec) versus Young modulus (kPa). Ultrasonography 2014, 33, 34. [Google Scholar] [CrossRef] [PubMed]
- Zhu, R.; Huang, G.; Hu, G. Effective dynamic properties and multi-resonant design of acoustic metamaterials. J. Vib. Acoust. 2012, 134, 031006. [Google Scholar] [CrossRef]
- Lindsay, C.; Kumlin, J.; Jirasek, A.; Lee, R.; Martinez, D.; Schaffer, P.; Hoehr, C. 3D printed plastics for beam modulation in proton therapy. Phys. Med. Biol. 2015, 60, N231. [Google Scholar] [CrossRef] [PubMed]
- Alles, E.J.; Nikitichev, D.; Desjardins, A.E. Fabrication and characterisation of miniature parabolic acoustic lenses. In Proceedings of the 2015 IEEE International Ultrasonics Symposium (IUS), Taipei, Taiwan, 21–24 October 2015; pp. 1–4. [Google Scholar]
- Carovac, A.; Smajlovic, F.; Junuzovic, D. Application of ultrasound in medicine. Acta Inf. Med. 2011, 19, 168. [Google Scholar] [CrossRef] [PubMed]
- Garcia, C.R.; Correa, J.; Espalin, D.; Barton, J.H.; Rumpf, R.C.; Wicker, R.; Gonzalez, V. 3D printing of anisotropic metamaterials. Prog. Electromagn. Res. Lett. 2012, 34, 75–82. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, W.; Chen, H.; Konneker, A.; Popa, B.I.; Cummer, S.A. Wavefront modulation and subwavelength diffractive acoustics with an acoustic metasurface. arXiv 2014, arXiv:1406.6306. [Google Scholar] [PubMed]
- Yurduseven, O.; Gollub, J.N.; Marks, D.L.; Smith, D.R. Metallization of a 3D printed cavitiy for imaging. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, Puerto Rico, 26 June–1 July 2016; pp. 855–856. [Google Scholar]
- Ghazi, G.; Rappaport, C.M.; Martinez-Lorenzo, J.A. Improved SAR imaging contour extraction using smooth sparsity-driven regularization. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 266–269. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density | Longitudinal Speed of Sound | Reference |
|---|---|---|---|
| Acrylic (PMMA) | 1200 kg/m | 2730 m/s | [43,44] |
| Background | 1035 kg/m | 1487 m/s | [45,46] |
| Target | 1077 kg/m | 1549 m/s | [47,48] |
| Steel | 7700 kg/m | 5050 m/s | [49] |
| Aluminum | 2730 kg/m | 6800 m/s | [49] |
| VeroWhitePlus | 1175 kg/m | 2539 m/s | [50,51] |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 6 mm | 6 mm | ||
| 2 mm | 2 mm | ||
| 2 mm | 0.05 mm | ||
| 0.1 mm | (−0.5, 2.9) mm | ||
| (0.5, 2.9) mm | (−0.6, −2) mm | ||
| (0.8, −2) mm | 501 | ||
| 120 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghanbarzadeh-Dagheyan, A.; Liu, C.; Molaei, A.; Heredia, J.; Martinez Lorenzo, J. Holey-Cavity-Based Compressive Sensing for Ultrasound Imaging. Sensors 2018, 18, 1674. https://doi.org/10.3390/s18061674
Ghanbarzadeh-Dagheyan A, Liu C, Molaei A, Heredia J, Martinez Lorenzo J. Holey-Cavity-Based Compressive Sensing for Ultrasound Imaging. Sensors. 2018; 18(6):1674. https://doi.org/10.3390/s18061674
Chicago/Turabian StyleGhanbarzadeh-Dagheyan, Ashkan, Chang Liu, Ali Molaei, Juan Heredia, and Jose Martinez Lorenzo. 2018. "Holey-Cavity-Based Compressive Sensing for Ultrasound Imaging" Sensors 18, no. 6: 1674. https://doi.org/10.3390/s18061674
APA StyleGhanbarzadeh-Dagheyan, A., Liu, C., Molaei, A., Heredia, J., & Martinez Lorenzo, J. (2018). Holey-Cavity-Based Compressive Sensing for Ultrasound Imaging. Sensors, 18(6), 1674. https://doi.org/10.3390/s18061674