Numerical and Experimental Evaluation of High-Frequency Unfocused Polymer Transducer Arrays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
3. Experimental Setup for Acoustics Filed Pressure Measurement
4. Results and Discussion
4.1. Transducers Response Measurement
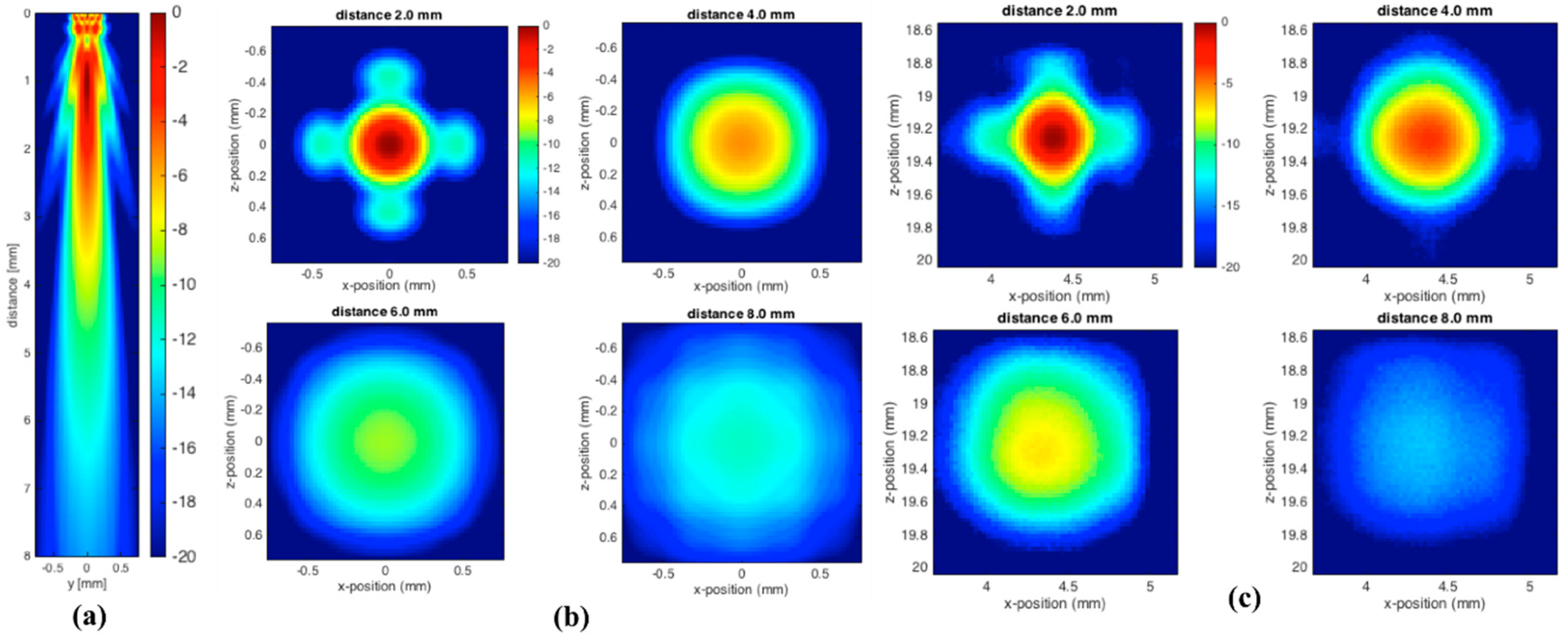
4.2. Ultrasonic Field Imaging and Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Habib, A.; Shelke, A.; Vogel, M.; Pietsch, U.; Jiang, X.; Kundu, T. Mechanical characterization of sintered piezo-electric ceramic material using scanning acoustic microscope. Ultrasonics 2012, 52, 989–995. [Google Scholar] [CrossRef] [PubMed]
- Habib, A.; Shelke, A.; Vogel, M.; Brand, S.; Jiang, X.; Pietsch, U.; Banerjee, S.; Kundu, T. Quantitative Ultrasonic Characterization of c-axis oriented polycrystalline AlN thin film for smart device application. Acta Acust. United Acust. 2015, 101, 675–683. [Google Scholar] [CrossRef]
- Lee, Y.C. Measurements of multimode leaky lamb waves propagating in metal sheets. Jpn. J. Appl. Phys. 2001, 40, 359. [Google Scholar] [CrossRef]
- Smolorz, S.; Grill, W. Focusing PVDF transducers for acoustic microscopy. Res. Nondestruct. Eval. 1996, 7, 195–201. [Google Scholar] [CrossRef]
- Hofmann, M.; Pflanzer, R.; Habib, A.; Shelke, A.; Bereiter-Hahn, J.; Bernd, A.; Kaufmann, R.; Sader, R.; Kippenberger, S. Scanning Acoustic Microscopy—A Novel Noninvasive Method to Determine Tumor Interstitial Fluid Pressure in a Xenograft Tumor Model. Transl. Oncol. 2016, 9, 179–183. [Google Scholar] [CrossRef] [PubMed]
- Merks, E.J.W.; Bouakaz, A.; Bom, N.; Lancee, C.T.; Van Der Steen, A.F.W.; De Jong, N. Design of a multilayer transducer for acoustic bladder volume assessment. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2006, 53, 1730–1738. [Google Scholar] [CrossRef] [PubMed]
- Wagle, S.; Habib, A.; Melandsø, F. Ultrasonic measurements of surface defects on flexible circuits using high-frequency focused polymer transducers. Jpn. J. Appl. Phys. 2017, 56, 07JC05. [Google Scholar] [CrossRef] [Green Version]
- Guzmán, E.; Cugnoni, J.; Gmür, T. Monitoring of composite structures using a network of integrated PVDF film transducers. Smart Mater. Struct. 2015, 24, 055017. [Google Scholar] [CrossRef]
- Brown, L.F.; Mason, J.L. Disposable PVDF ultrasonic transducers for nondestructive testing applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1996, 43, 560–568. [Google Scholar] [CrossRef]
- Zhang, Q.; Lewin, P.A.; Bloomfield, P.E. PVDF transducers—A performance comparison of single-layer and multilayer structures. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1997, 44, 1148–1156. [Google Scholar] [CrossRef]
- Jeong, J.S.; Shung, K.K. Improved fabrication of focused single element P (VDF–TrFE) transducer for high frequency ultrasound applications. Ultrasonics 2013, 53, 455–458. [Google Scholar] [CrossRef] [PubMed]
- Lockwood, G.; Turnball, D.; Christopher, D.; Foster, F.S. Beyond 30 MHz [applications of high-frequency ultrasound imaging]. IEEE Eng. Med. Biology Mag. 1996, 15, 60–71. [Google Scholar] [CrossRef]
- Tsuchiya, S.; Sato, T.; Koyama, K.; Ikeda, S.; Wada, Y. Application of Piezoelectric Film of Vinylidene Fluoride-Trifluoroethylene Copolymer to a Highly Sensitive Miniature Hydrophone. Jpn. J. Appl. Phys. 1987, 26, 103. [Google Scholar] [CrossRef]
- Gallantree, H.; Smith, R. Small Area Membrane Hydrophones. In Proceedings of the IEEE 1987 Ultrasonics Symposium, Denver, CO, USA, 14–16 October 1987; pp. 761–764. [Google Scholar]
- Turnbull, D.H.; Starkoski, B.G.; Harasiewicz, K.A.; Semple, J.L.; From, L.; Gupta, A.K.; Sauder, D.N.; Foster, F.S. A 40–100 MHz B-scan ultrasound backscatter microscope for skin imaging. Ultrasound Med. Biol. 1995, 21, 79–88. [Google Scholar] [CrossRef]
- Ye, S.; Harasiewicz, K.; Pavlin, C.; Foster, F. Ultrasound characterization of normal ocular tissue in the frequency range from 50 MHz to 100 MHz. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1995, 42, 8–14. [Google Scholar] [CrossRef]
- Foster, F.S.; Pavlin, C.J.; Harasiewicz, K.A.; Christopher, D.A.; Turnbull, D.H. Advances in ultrasound biomicroscopy. Ultrasound Med. Biol. 2000, 26, 1–27. [Google Scholar] [CrossRef]
- Bloomfield, P.E.; Lo, W.-J.; Lewin, P.A. Experimental study of the acoustical properties of polymers utilized to construct PVDF ultrasonic transducers and the acousto-electric properties of PVDF and P (VDF/TrFE) films. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 1397–1405. [Google Scholar] [CrossRef] [PubMed]
- Chae, M.-K.; Kim, M.-J.; Ha, K.-L.; Lee, C.-B. Focal length controllable ultrasonic transducer using bimorph-type bending actuator. Jpn. J. Appl. Phys. 2003, 42, 3091. [Google Scholar] [CrossRef]
- Xi, L.; Li, X.; Jiang, H. Variable-thickness multilayered polyvinylidene fluoride transducer with improved sensitivity and bandwidth for photoacoustic imaging. Appl. Phys. Lett. 2012, 101, 173702. [Google Scholar] [CrossRef]
- Melandsø, F.; Wagle, S.; Decharat, A.; Habib, A.; Ahluwalia, B.S. High-frequency poly (vinylidene fluoride) copolymer transducers used for spectral characterization of settled microparticles. Jpn. J. Appl. Phys. 2016, 55, 07KB07. [Google Scholar] [CrossRef]
- Decharat, A.; Wagle, S.; Melandsø, F. Effect of polymer electrode thickness on the acoustical properties of all-screen printed piezoelectric pvdf copolymer transducers. Jpn. J. Appl. Phys. 2014, 53, 05HB16. [Google Scholar] [CrossRef]
- Wagle, S.; Decharat, A.; Habib, A.; Ahluwalia, B.S.; Melandsø, F. Evaluation of adhesive-free crossed-electrode poly (vinylidene fluoride) copolymer array transducers for high frequency imaging. Jpn. J. Appl. Phys. 2016, 55, 07KE11. [Google Scholar] [CrossRef]
- Kimura, K.; Ohigashi, H. Generation of very high-frequency ultrasonic waves using thin films of vinylidene fluoride-trifluoroethylene copolymer. J. Appl. Phys. 1987, 61, 4749–4754. [Google Scholar] [CrossRef]
- Robert, M.; Molingou, G.; Snook, K.; Cannata, J.; Shung, K.K. Fabrication of focused poly (vinylidene fluoride-trifluoroethylene) P (VDF-TrFE) copolymer 40–50 MHz ultrasound transducers on curved surfaces. J. Appl. Phys. 2004, 96, 252–256. [Google Scholar] [CrossRef]
- Brown, L.F.; Carlson, D.L. Ultrasound transducer models for piezoelectric polymer films. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1989, 36, 313–318. [Google Scholar] [CrossRef] [PubMed]
- Brown, L.; Carlson, R.; Sempsrott, J. Spin-Cast P (VDF-TrFE) films for high performance medical ultrasound transducers. In Proceedings of the Ultrasonics Symposium, Toronto, ON, Canada, 5–8 October 1997; pp. 1725–1727. [Google Scholar]
- Decharat, A.; Wagle, S.; Melandso, F. Evaluation of the acoustical properties of adhesive-free dual layer piezoelectric PVDF copolymer transducer. In Proceedings of the European Frequency and Time Forum & International Frequency Control Symposium (EFTF/IFC), 2013 Joint, Prague, Czech Republic, 21–25 July 2013; pp. 266–269. [Google Scholar]
- Decharat, A.; Wagle, S.; Habib, A.; Jacobsen, S.; Melandsø, F. High frequency copolymer ultrasonic transducer array of size-effective elements. Smart Mater. Struct. 2018, 27, 025001. [Google Scholar] [CrossRef] [Green Version]
- Zou, W.; Holland, S.; Kim, K.Y.; Sachse, W. Wideband high-frequency line-focus PVDF transducer for materials characterization. Ultrasonics 2003, 41, 157–161. [Google Scholar] [CrossRef]
- Lu, Y.; He, C.; Song, G.; Wu, B.; Chung, C.H.; Lee, Y.C. Fabrication of broadband poly (vinylidene difluoride-trifluroethylene) line-focus ultrasonic transducers for surface acoustic wave measurements of anisotropy of a (100) silicon wafer. Ultrasonics 2014, 54, 296–304. [Google Scholar] [CrossRef] [PubMed]
- Kino, G.S. Acoustic Waves: Devices, Imaging and Analog Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Fukuhara, M. Temperature dependency of elastic moduli and internal dilational and shear frictions of polyetherimide. J. Appl. Polym. Sci. 2003, 90, 759–764. [Google Scholar] [CrossRef]
- Wagle, S.; Decharat, A.; Melandsø, F. Adhesive-free dual layer piezoelectric PVDF copolymer transducers in sender and receiver sequences. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Chicago, IL, USA, 3–6 September 2014; pp. 2063–2066. [Google Scholar]
- 0.075 mm Needle Hydrophone (75 micron). Available online: http://www.acoustics.co.uk/product/75-micron-needle-hydrophone/ (accessed on 16 May 2018).
- Greenspan, M.; Tschiegg, C.E. Tables of the speed of sound in water. J. Acoust. Soc. Am. 1959, 31, 75–76. [Google Scholar] [CrossRef]
- Smith, W.J. Modern Optical Engineering, 3rd ed.; McGraw-Hill: New York, NY, USA, 2000; pp. 157–160. [Google Scholar]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habib, A.; Wagle, S.; Decharat, A.; Melandsø, F. Numerical and Experimental Evaluation of High-Frequency Unfocused Polymer Transducer Arrays. Sensors 2018, 18, 1908. https://doi.org/10.3390/s18061908
Habib A, Wagle S, Decharat A, Melandsø F. Numerical and Experimental Evaluation of High-Frequency Unfocused Polymer Transducer Arrays. Sensors. 2018; 18(6):1908. https://doi.org/10.3390/s18061908
Chicago/Turabian StyleHabib, Anowarul, Sanat Wagle, Adit Decharat, and Frank Melandsø. 2018. "Numerical and Experimental Evaluation of High-Frequency Unfocused Polymer Transducer Arrays" Sensors 18, no. 6: 1908. https://doi.org/10.3390/s18061908
APA StyleHabib, A., Wagle, S., Decharat, A., & Melandsø, F. (2018). Numerical and Experimental Evaluation of High-Frequency Unfocused Polymer Transducer Arrays. Sensors, 18(6), 1908. https://doi.org/10.3390/s18061908