An Adaptive Nonlocal Mean Filter for PolSAR Data with Shape-Adaptive Patches Matching



Abstract
:1. Introduction
2. The Construction of SA Matching Patches Based on the Proposed PolLRT-CMRG Method
2.1. PolSAR Images Statistic
2.2. The Proposed PolLRT-CMRG Method for Constructing SA Matching Patches
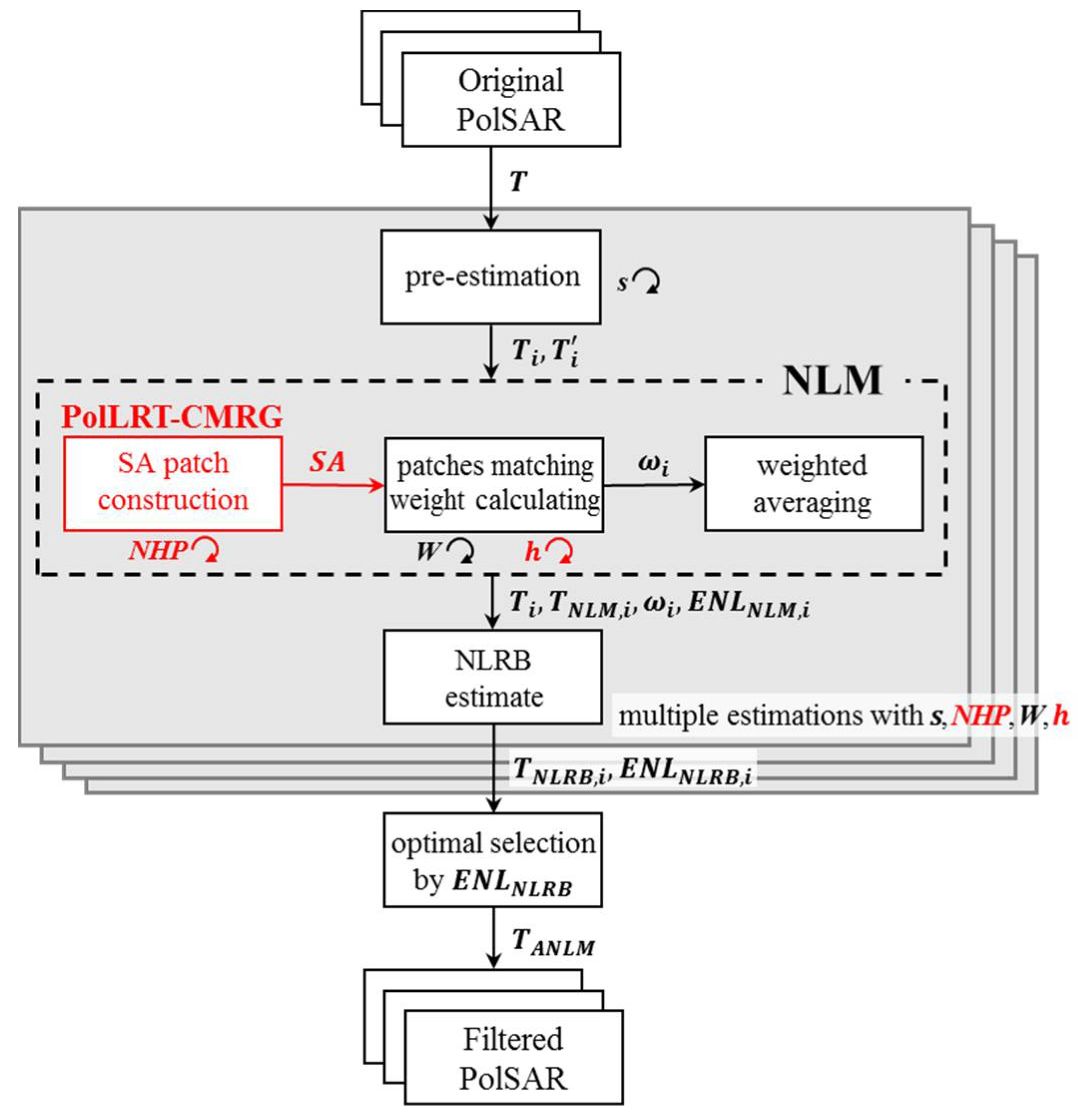
3. The Proposed ANLM Filtering for PolSAR Images
3.1. Pre-Estimation of Polarimetric Coherency Matrices with Reconstruction and Prefiltering
3.2. The NLM Estimate with SA Patches Matching
3.3. The NLRB Estimator from the Selected Homogeneous Pixels
3.4. Optimal Selection of Multiple Estimations with Multiple Parameters
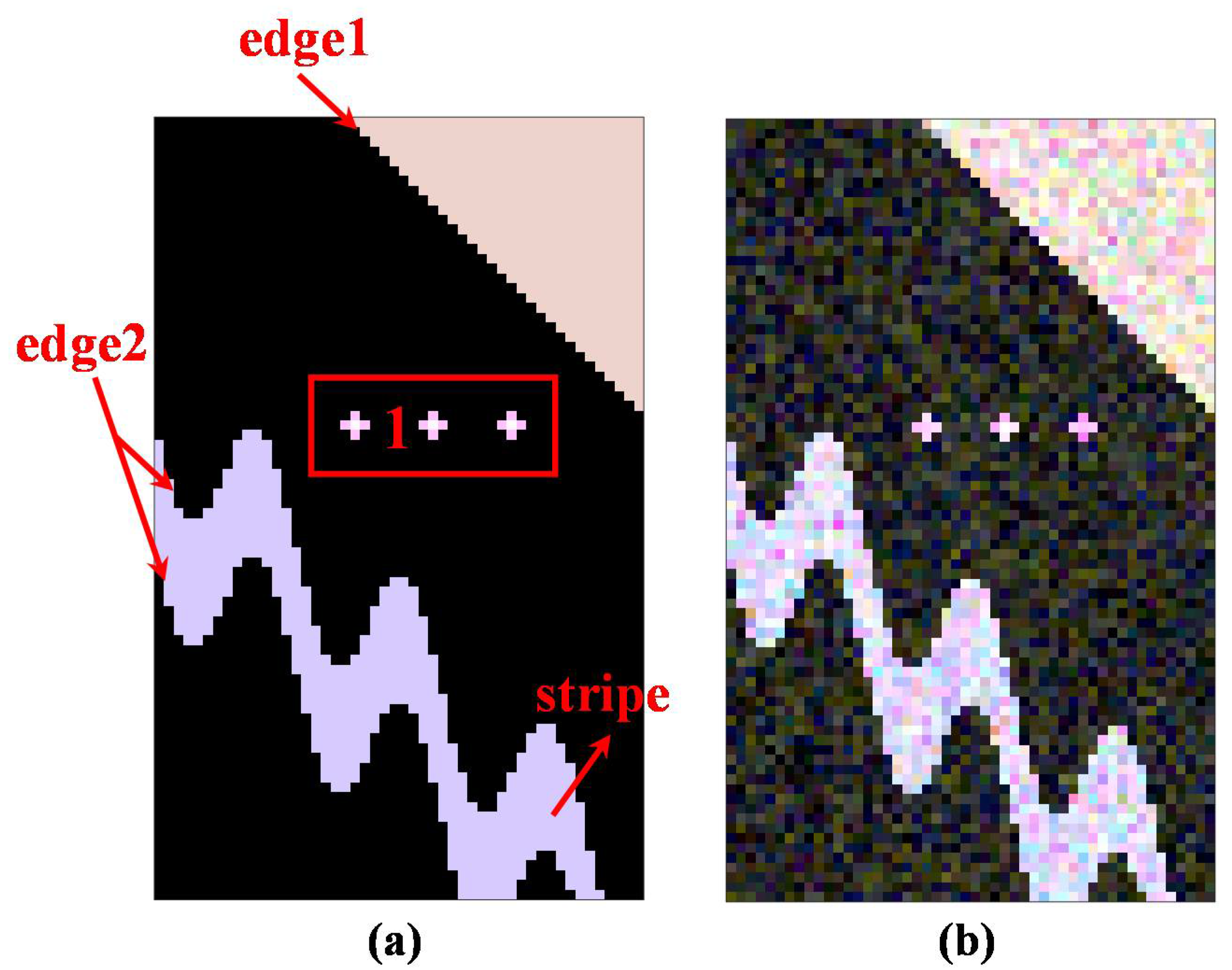
4. Experimental Results and Analysis of Simulated PolSAR Dataset
4.1. Data Sets Description and Experimental Settings
- (1)
- = {3 × 3, 7 × 7, 11 × 11, 15 × 15}
- (2)
- = {0, 1, 2}
- (3)
- MSP = {5 × 5}, = {5, 9, 13, 17}, = {: : }, = ()/10
- (4)
- 𝕙 = {: : }, = ()/4, k = 2
4.2. Quantitative Evaluation on Speckle Reduction and Detail Preservation
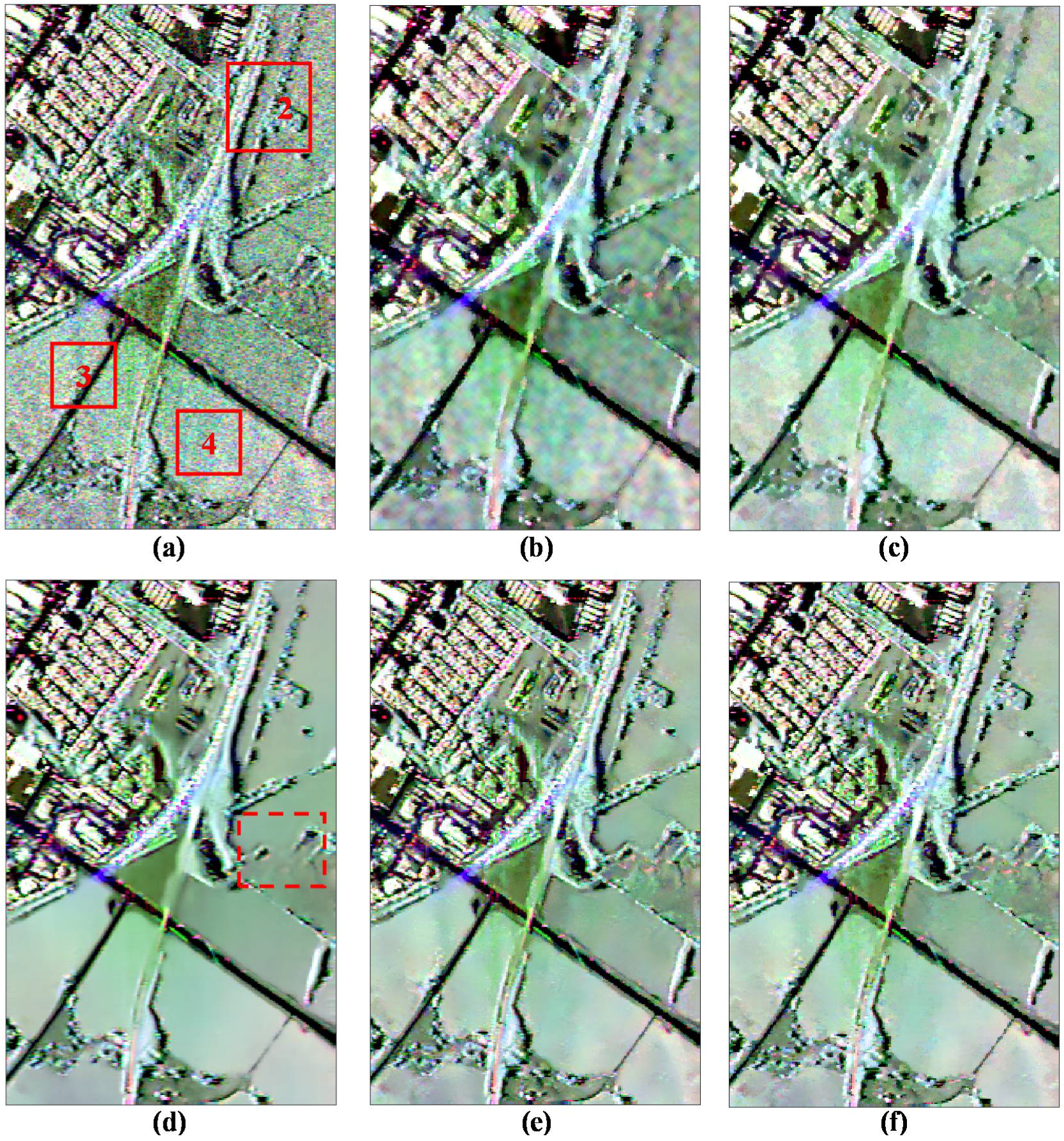
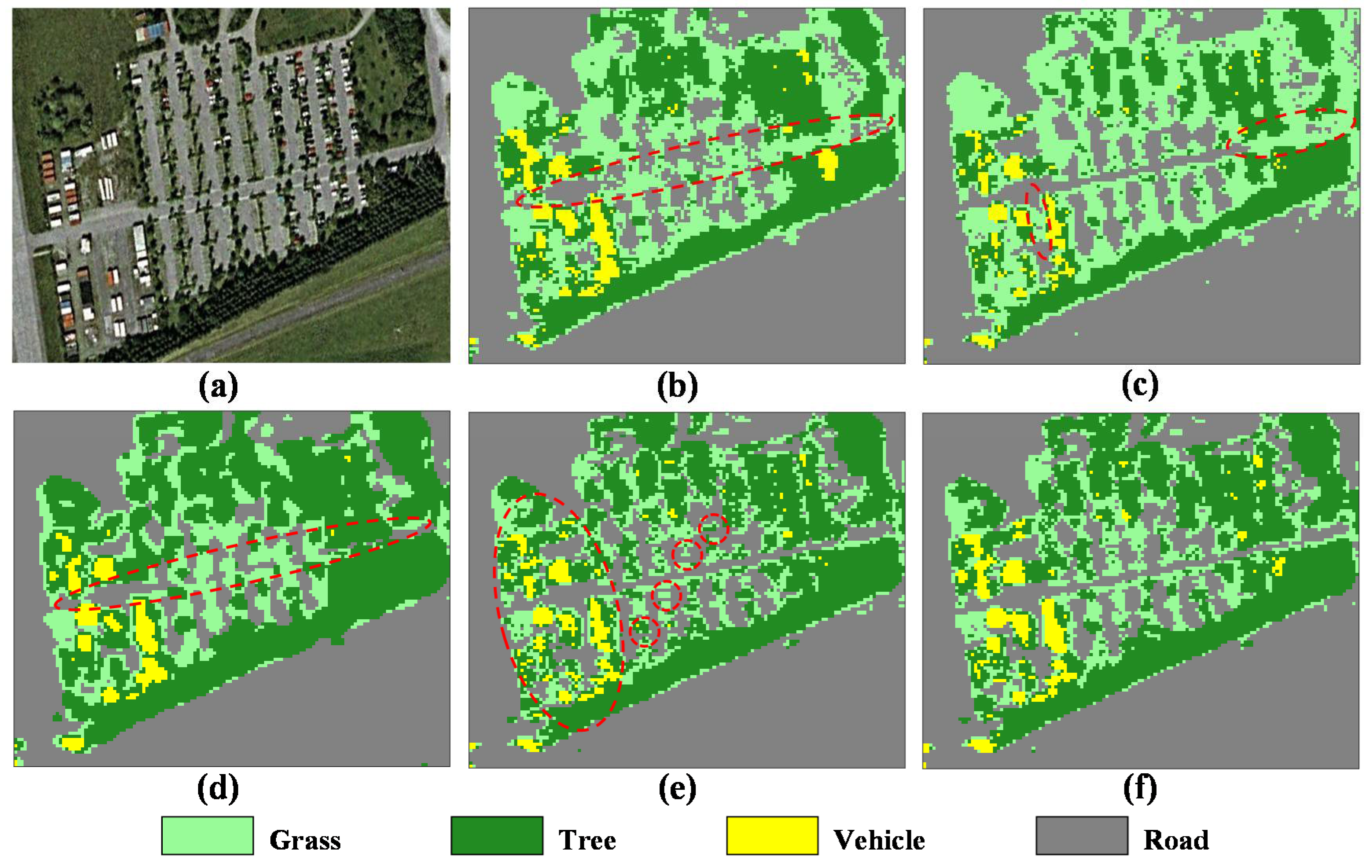
5. Experimental Results and Analysis of Real PolSAR Dataset
5.1. Performance Evaluation Based on Low Spatial Resolution SAR580-Convair Data
5.2. Performance Evaluation Based on High Spatial Resolution ESAR Data
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Ainsworth, T.L.; Du, L.J.; Schuler, D.L.; Cloude, S.R. Unsupervised classification using polarimetric decomposition and the complex Wishart classifier. IEEE Trans. Geosci. Remote Sens. 1999, 4, 2178–2180. [Google Scholar]
- Antropov, O.; Rauste, Y.; Astola, H.; Praks, J.; Häme, T.; Hallikainen, M.T. Land Cover and Soil Type Mapping From Spaceborne PolSAR Data at L-Band With Probabilistic Neural Network. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5256–5270. [Google Scholar] [CrossRef]
- Xie, Q.; Ballester-Berman, J.D.; Lopez-Sanchez, J.M.; Zhu, J.; Wang, C. On the use of generalized volume scattering models for the improvement of general polarimetric model-based decomposition. Remote Sens. 2017, 2, 117. [Google Scholar] [CrossRef]
- Wang, W.; Ji, Y.; Lin, X. A Novel Fusion-Based Ship Detection Method from Pol-SAR Images. Sensors 2015, 15, 25072–25089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiang, D.; Tang, T.; Hu, C.; Fan, Q.; Su, Y. Built-up Area Extraction from PolSAR Imagery with Model-Based Decomposition and Polarimetric Coherence. Remote Sens. 2016, 8, 685. [Google Scholar] [CrossRef]
- Sato, M.; Chen, S.W.; Satake, M. Polarimetric SAR Analysis of Tsunami Damage Following the March 11, 2011 East Japan Earthquake. Proc. IEEE 2012, 100, 2861–2875. [Google Scholar] [CrossRef]
- Cai, J.; Wang, C.; Mao, X.; Wang, Q. An Adaptive Offset Tracking Method with SAR Images for Landslide Displacement Monitoring. Remote Sens. 2017, 9, 830. [Google Scholar] [CrossRef]
- Li, Y.; Hong, W.; Pottier, E. Topography Retrieval from Single-Pass POLSAR Data Based on the Polarization-Dependent Intensity Ratio. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3160–3177. [Google Scholar] [CrossRef]
- Fu, H.Q.; Zhu, J.J.; Wang, C.C.; Wang, H.Q.; Zhao, R. A Wavelet Decomposition and Polynomial Fitting-Based Method for the Estimation of Time-Varying Residual Motion Error in Airborne Interferometric SAR. IEEE Trans. Geosci. Remote Sens. 2018, 56, 49–59. [Google Scholar] [CrossRef]
- Shen, P.; Wang, C.; Zhu, J.; Gao, H.; Fu, H.; Xie, Q.; Wang, S.; He, S. Vegetation Height Inversion Method with Three-layer Model by Fusing the Ascending and Descending PolInSAR Data. Acta Geodaetica et Cartographica Sinica 2017, 46, 1868–1879. [Google Scholar]
- Zhang, H.; Wang, C.; Zhu, J.; Fu, H.; Xie, Q.; Shen, P. Forest Above-Ground Biomass Estimation Using Single-Baseline Polarization Coherence Tomography with P-Band PolInSAR Data. Forests 2018, 9, 163. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.R.; Grandi, G. Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar]
- Lopez-Martinez, C.; Fabregas, X. Polarimetric SAR speckle noise model. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2232–2242. [Google Scholar] [CrossRef] [Green Version]
- Vasile, G.; Trouve, E.; Lee, J.S.; Buzuloiu, V. Intensity-driven adaptive-neighborhood technique for polarimetric and interferometric SAR parameters estimation. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1609–1621. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Chen, Y.; An, W.; Cui, Y.; Yang, J. Nonlocal Filtering for Polarimetric SAR Data: A Pretest Approach. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1744–1754. [Google Scholar] [CrossRef]
- Deledalle, C.A.; Denis, L.; Tupin, F.; Reigber, A.; Jäger, M. NL-SAR: A Unified Nonlocal Framework for Resolution-Preserving (Pol)(In)SAR Denoising. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2021–2038. [Google Scholar] [CrossRef] [Green Version]
- Buades, A.; Coll, B.; Morel, J.M. A non-local algorithm for image denoising. In Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recog. 2005, 2, 60–65. [Google Scholar]
- Lee, J.S.; Wen, J.H.; Ainsworth, T.L.; Chen, K.S.; Chen, A.J. Improved Sigma Filter for Speckle Filtering of SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 202–213. [Google Scholar]
- Zhong, H.; Zhang, J.; Liu, G. Robust Polarimetric SAR Despeckling Based on Nonlocal Means and Distributed Lee Filter. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4198–4210. [Google Scholar] [CrossRef]
- Lee, J.S.; Cloude, S.R.; Papathanassiou, K.P.; Grunes, M.R. Speckle filtering and coherence estimation of polarimetric SAR interferometry data for forest applications. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2254–2263. [Google Scholar]
- Vasile, G.; Ovarlez, J.P.; Pascal, F.; Tison, C. Coherency Matrix Estimation of Heterogeneous Clutter in High-Resolution Polarimetric SAR Images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1809–1826. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.R.; Schuler, D.L.; Pottier, E.; Ferro-Famil, L. Scattering-model-based speckle filtering of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2005, 44, 176–187. [Google Scholar]
- D’Hondt, O.; Guillaso, S.; Hellwich, O. Iterative Bilateral Filtering of Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1628–1639. [Google Scholar] [CrossRef] [Green Version]
- Buades, A.; Coll, B.; Morel, J.M. A Review of Image Denoising Algorithms, with a New One. Siam J. Multiscale Model. Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef] [Green Version]
- Deledalle, C.A.; Denis, L.; Tupin, F. Iterative weighted maximum likelihood denoising with probabilistic patch-based weights. IEEE Trans. Image Process. 2009, 18, 2661–2672. [Google Scholar] [CrossRef] [PubMed]
- Deledalle, C.A.; Tupin, F.; Denis, L. Polarimetric SAR estimation based on non-local means. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 2515–2518. [Google Scholar]
- Deledalle, C.A.; Denis, L.; Tupin, F. NL-InSAR: Nonlocal Interferogram Estimation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1441–1452. [Google Scholar] [CrossRef]
- Torres, L.; Sant’Anna, S.J.; Freitas, C.D.C.; Frery, A.C. Speckle reduction in polarimetric SAR imagery with stochastic distances and nonlocal means. Pattern Recognit. 2014, 47, 141–157. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Ainsworth, T.L.; Lee, J.S. Application of mixture regression for improved polarimetric SAR speckle filtering. IEEE Trans. Geosci. Remote Sens. 2017, 55, 453–467. [Google Scholar] [CrossRef]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. BM3D Image Denoising with Shape-Adaptive Principal Component Analysis. In Proceedings of the SPARS’09-Signal Processing with Adaptive Sparse Structured Representations, Saint-Malo, France, 6–9 April 2009. [Google Scholar]
- Deledalle, C.A.; Duval, V.; Salmon, J. Non-Local Methods with Shape-Adaptive Patches (NLM-SAP). J. Math. Imaging Vis. 2012, 43, 103–120. [Google Scholar] [CrossRef]
- Lopes, A.; Touzi, R.; Nezry, E. Adaptive speckle filters and scene heterogeneity. IEEE Trans. Geosci. Remote Sens. 1990, 28, 992–1000. [Google Scholar] [CrossRef]
- Lang, F.; Yang, J.; Li, D. Adaptive-Window Polarimetric SAR Image Speckle Filtering Based on a Homogeneity Measurement. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5435–5446. [Google Scholar] [CrossRef]
- Lee, J.S.; Hoppel, K.W.; Mango, S.A.; Miller, A.R. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Kervrann, C. Local Adaptivity to Variable Smoothness for Exemplar-Based Image Regularization and Representation. Int. J. Comput. Vis. 2008, 79, 45–69. [Google Scholar] [CrossRef]
- Lee, J.S. Speckle analysis and smoothing of synthetic aperture radar images. Comput. Graph. Image Process. 1981, 17, 24–32. [Google Scholar] [CrossRef]
- D’Hondt, O.; López-Martínez, C.; Guillaso, S.; Hellwich, O. Nonlocal Filtering Applied to 3-D Reconstruction of Tomographic SAR Data. IEEE Trans. Geosci. Remote Sens. 2017, 99, 1–14. [Google Scholar] [CrossRef]
- Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. Estimation of the Equivalent Number of Looks in Polarimetric Synthetic Aperture Radar Imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3795–3809. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quality Indication | Simulated | Refined Lee | IDAN | Pretest | NL-SAR | ANLM with Single Threshold | ANLM with Optimal Threshold |
|---|---|---|---|---|---|---|---|
| 2.70 | 1.98 | 1.97 | 1.84 | 2.07 | 1.93 | 1.79 | |
| 4.25 | 2.28 | 2.22 | 2.28 | 3.02 | 2.08 | 1.62 | |
| 3.28 | 2.12 | 2.22 | 2.27 | 2.66 | 1.72 | 1.38 | |
| 2.78 | 1.52 | 2.15 | 1.29 | 2.10 | 1.52 | 1.23 | |
| 0.43 | 1.76 | 0.20 | 0.23 | 0.30 | 0.17 | 0.16 |
| Complex Correlation | Original | Refined Lee | IDAN | Pretest | NL-SAR | ANLM |
|---|---|---|---|---|---|---|
| 0.126 | 0.130 | 0.126 | 0.141 | 0.132 | 0.128 | |
| 0.188 | 0.171 | 0.188 | 0.239 | 0.213 | 0.224 | |
| 0.036 | 0.033 | 0.036 | 0.034 | 0.033 | 0.034 | |
| 2.961 | 2.735 | 2.961 | 2.582 | 2.680 | 2.613 | |
| 0.019 | 0.013 | 0.019 | 0.012 | 0.012 | 0.013 | |
| −2.146 | −2.271 | −2.146 | −2.434 | −2.036 | −2.220 |
| Method | Full Scene | Region 2 | Region 3 | Region 4 |
| NL-SAR | 35.0003 | 18.3173 | 52.7748 | 140.2214 |
| ANLM | 48.5872 | 31.6729 | 80.3525 | 172.6150 |
| Method | Full Scene | Region 5 | Region 6 | Region 7 | Region 8 |
|---|---|---|---|---|---|
| NL-SAR | 35.7548 | 15.5849 | 37.0379 | 80.9794 | 90.0223 |
| ANLM | 67.0987 | 34.1219 | 74.5117 | 129.3978 | 150.0078 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, P.; Wang, C.; Gao, H.; Zhu, J. An Adaptive Nonlocal Mean Filter for PolSAR Data with Shape-Adaptive Patches Matching. Sensors 2018, 18, 2215. https://doi.org/10.3390/s18072215
Shen P, Wang C, Gao H, Zhu J. An Adaptive Nonlocal Mean Filter for PolSAR Data with Shape-Adaptive Patches Matching. Sensors. 2018; 18(7):2215. https://doi.org/10.3390/s18072215
Chicago/Turabian StyleShen, Peng, Changcheng Wang, Han Gao, and Jianjun Zhu. 2018. "An Adaptive Nonlocal Mean Filter for PolSAR Data with Shape-Adaptive Patches Matching" Sensors 18, no. 7: 2215. https://doi.org/10.3390/s18072215
APA StyleShen, P., Wang, C., Gao, H., & Zhu, J. (2018). An Adaptive Nonlocal Mean Filter for PolSAR Data with Shape-Adaptive Patches Matching. Sensors, 18(7), 2215. https://doi.org/10.3390/s18072215