A Fusion Method for Combining Low-Cost IMU/Magnetometer Outputs for Use in Applications on Mobile Devices

 ,
, 
Abstract
:1. Introduction
2. Method
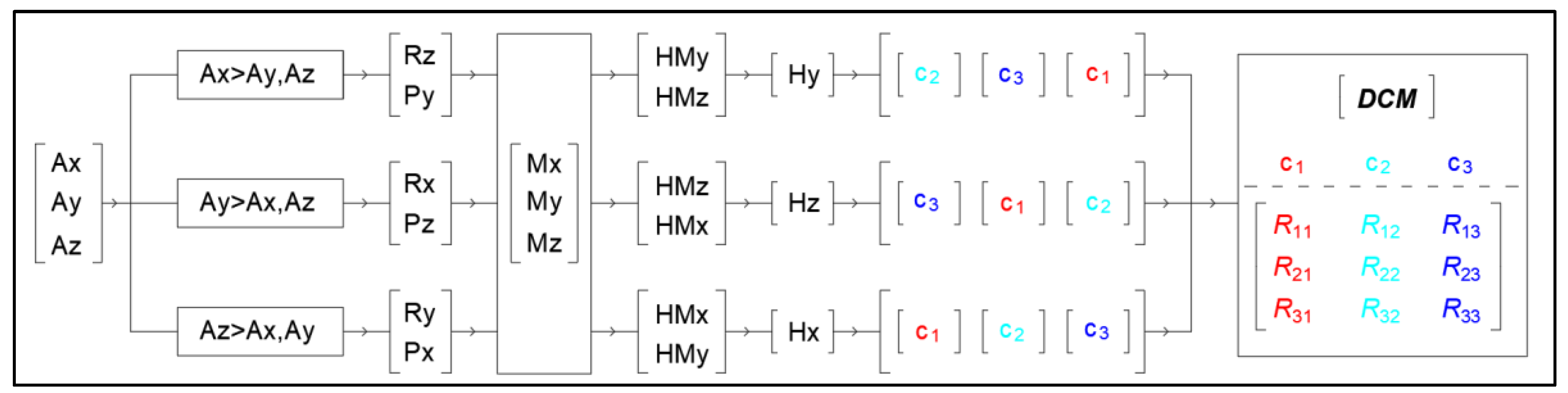
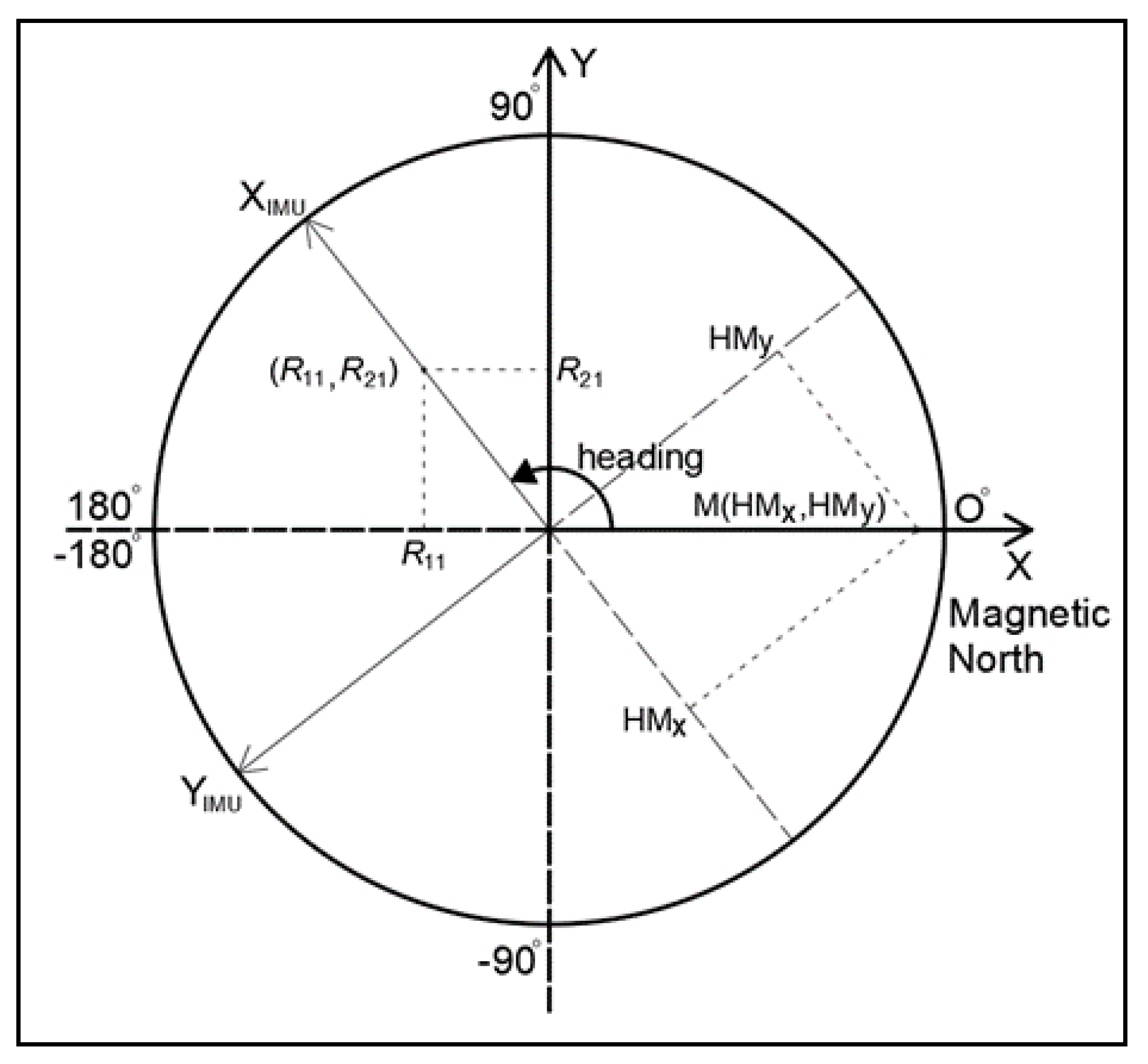
2.1. Estimation of 3D Orientation Using Accelerometer and Magnetometer Sensor Output
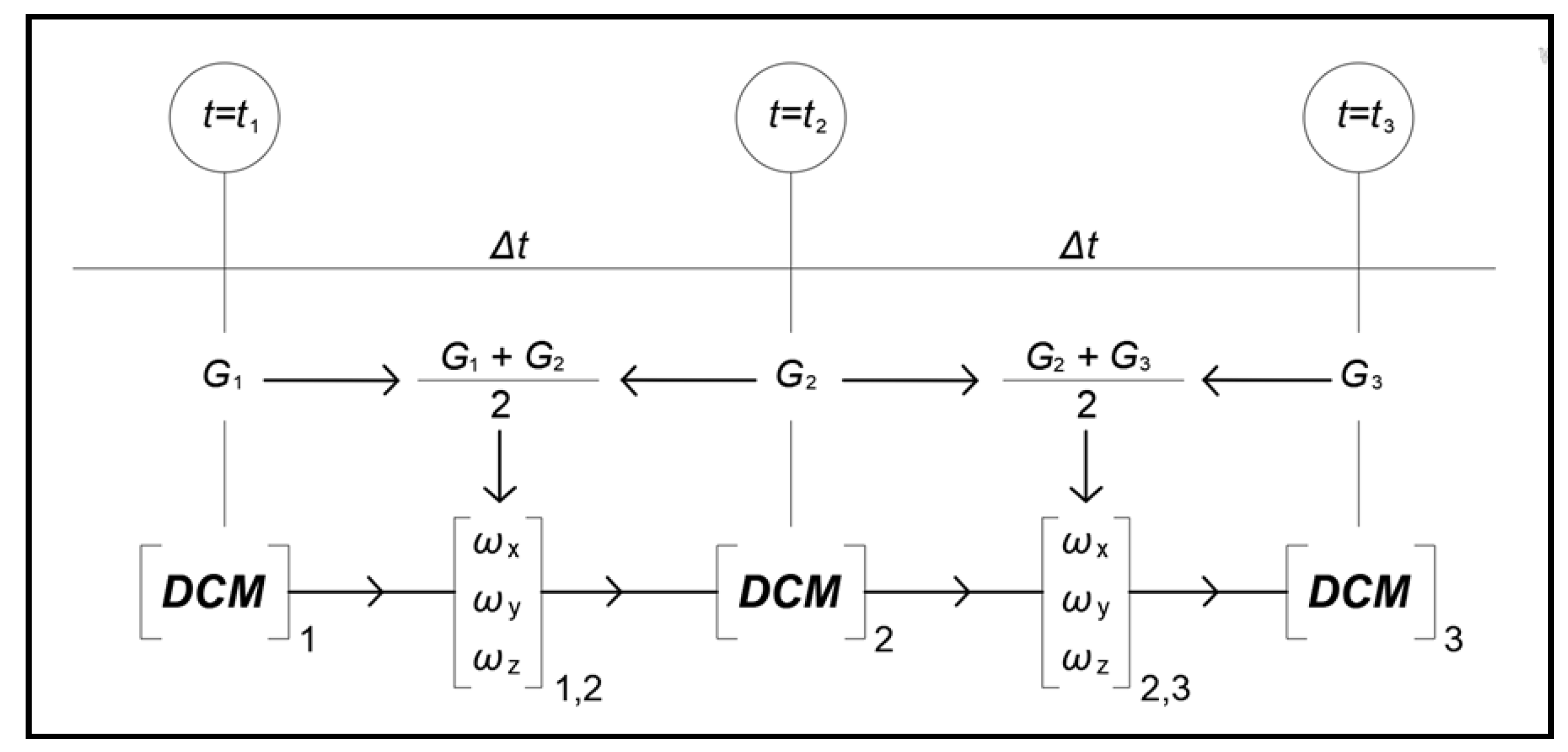
2.2. Dynamic Estimation of the 3D Orientation
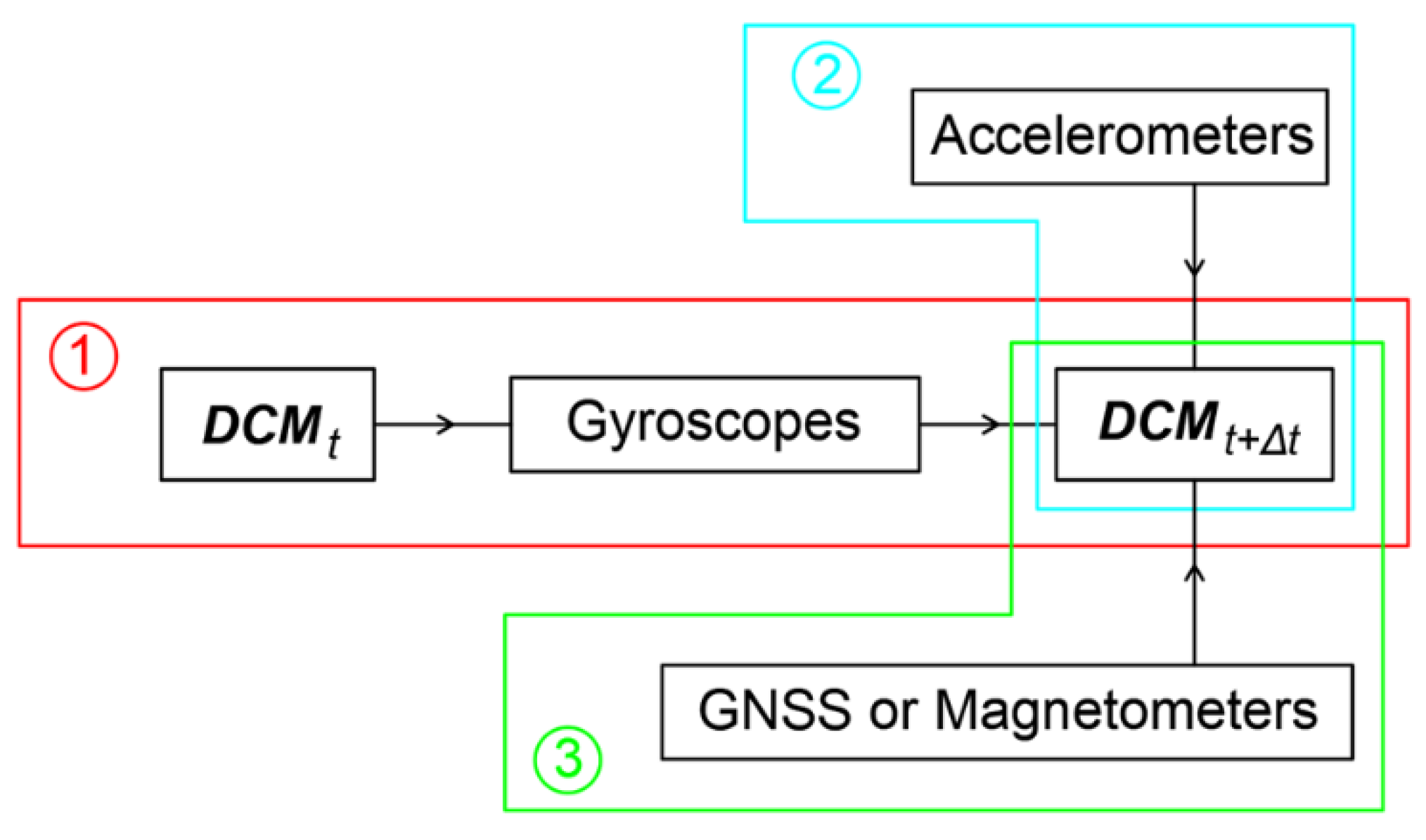
2.3. Mathematical Formulation of the Fusion Method Using Kalman Filter
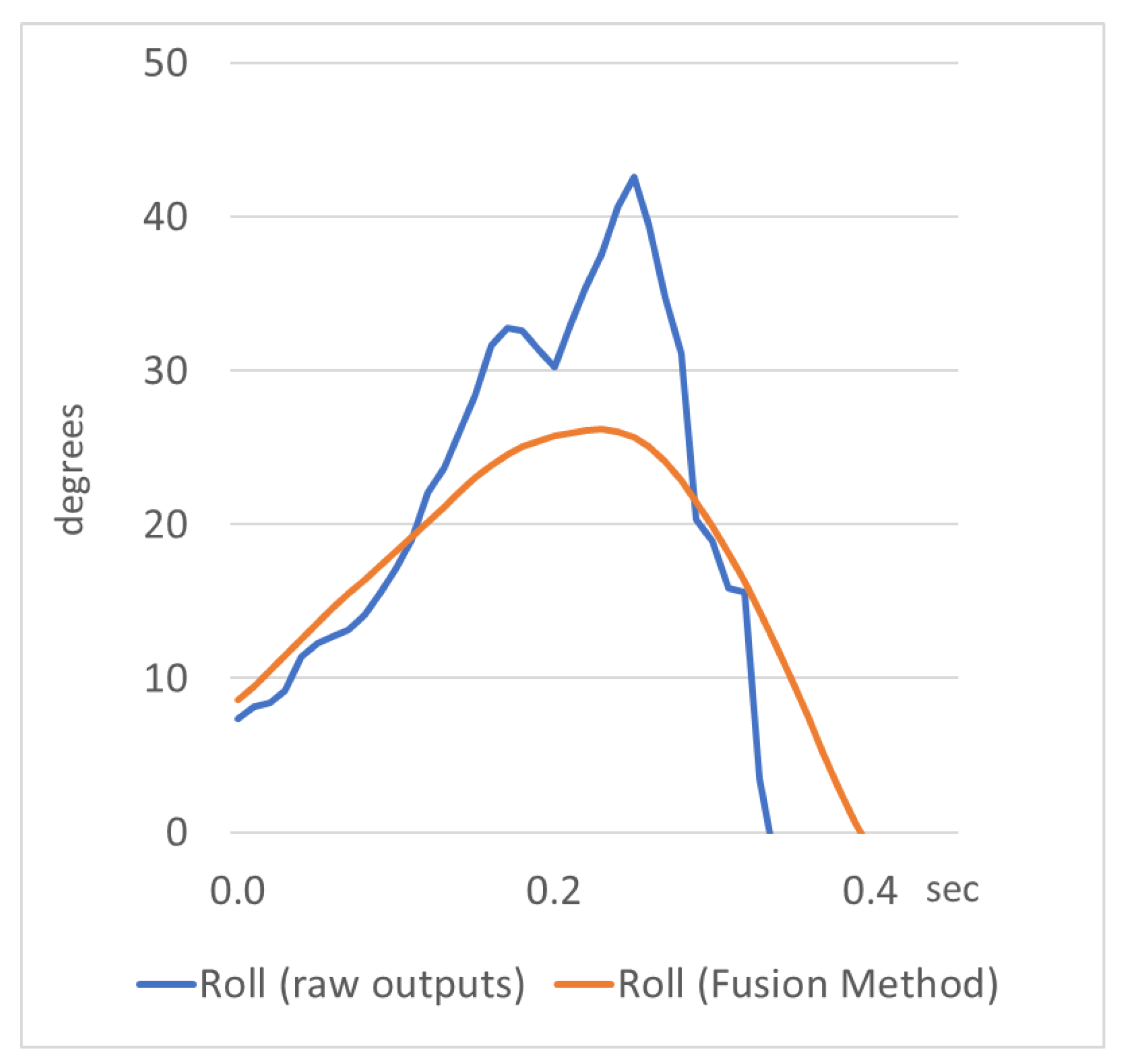
3. Evaluation of the Method and Discussion
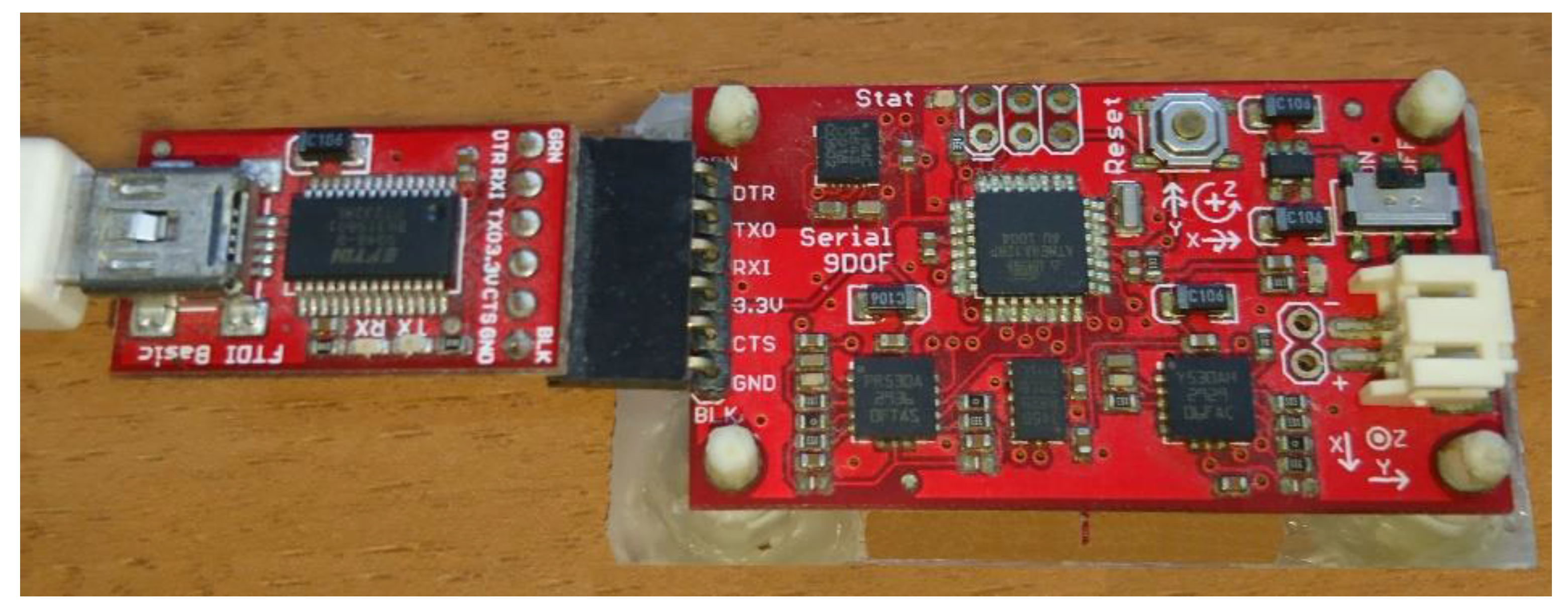
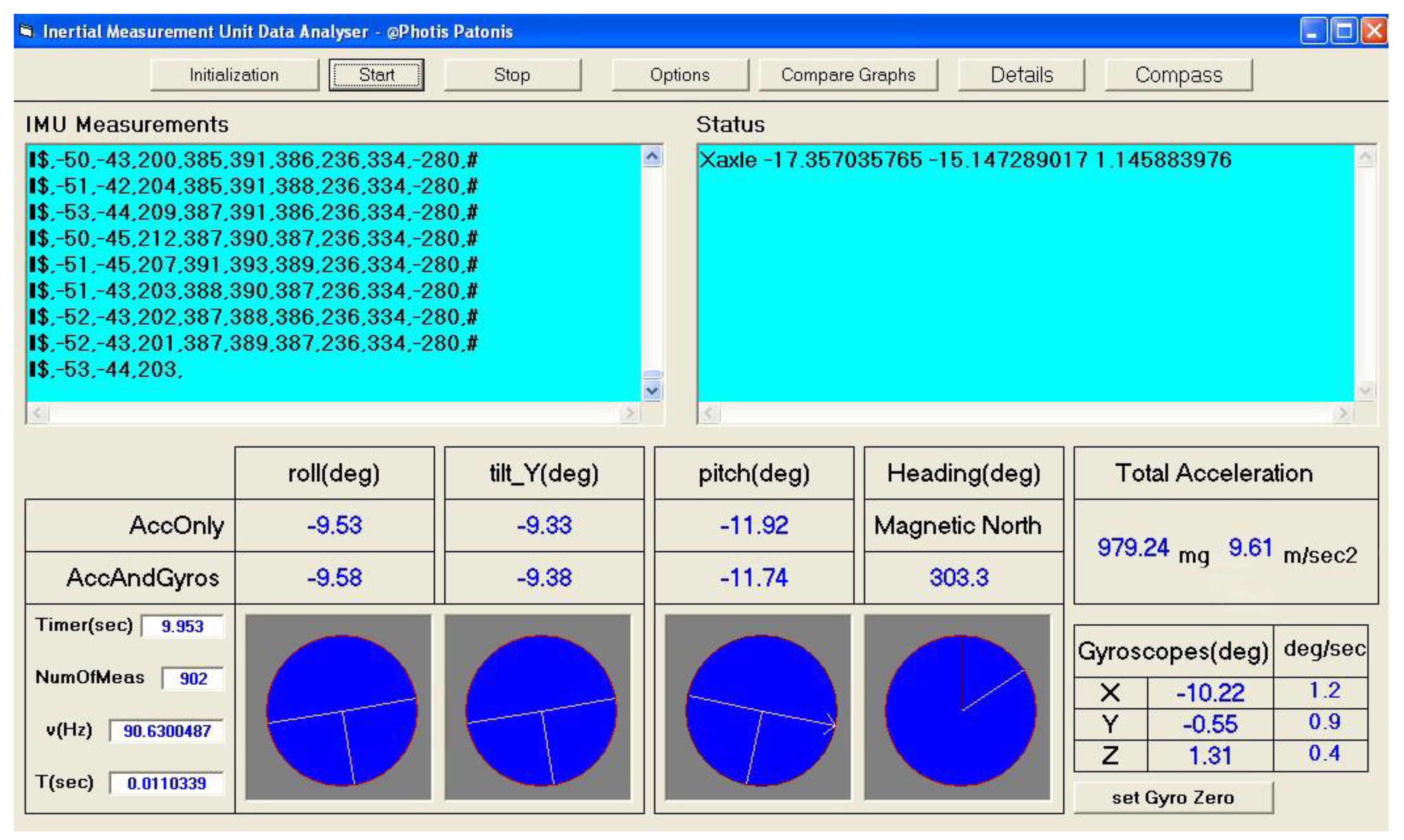
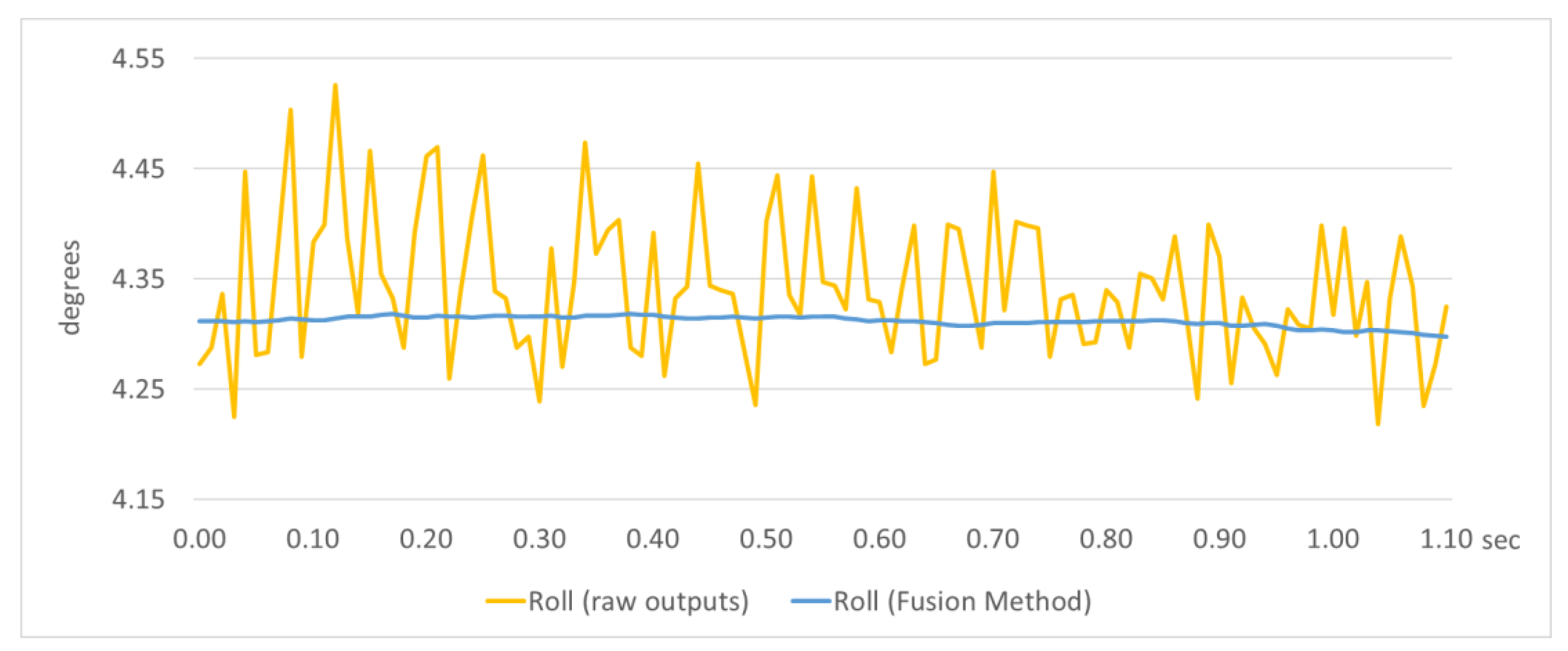
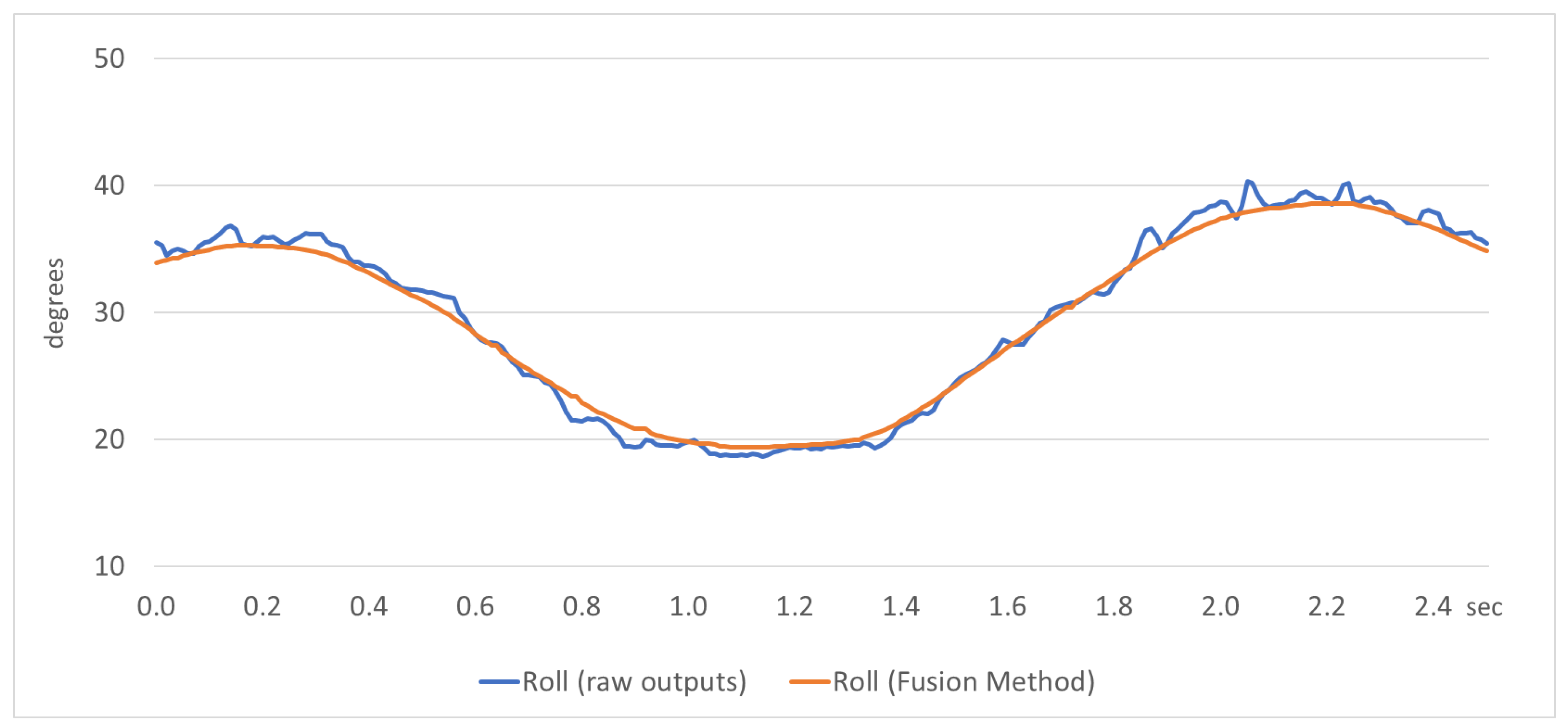
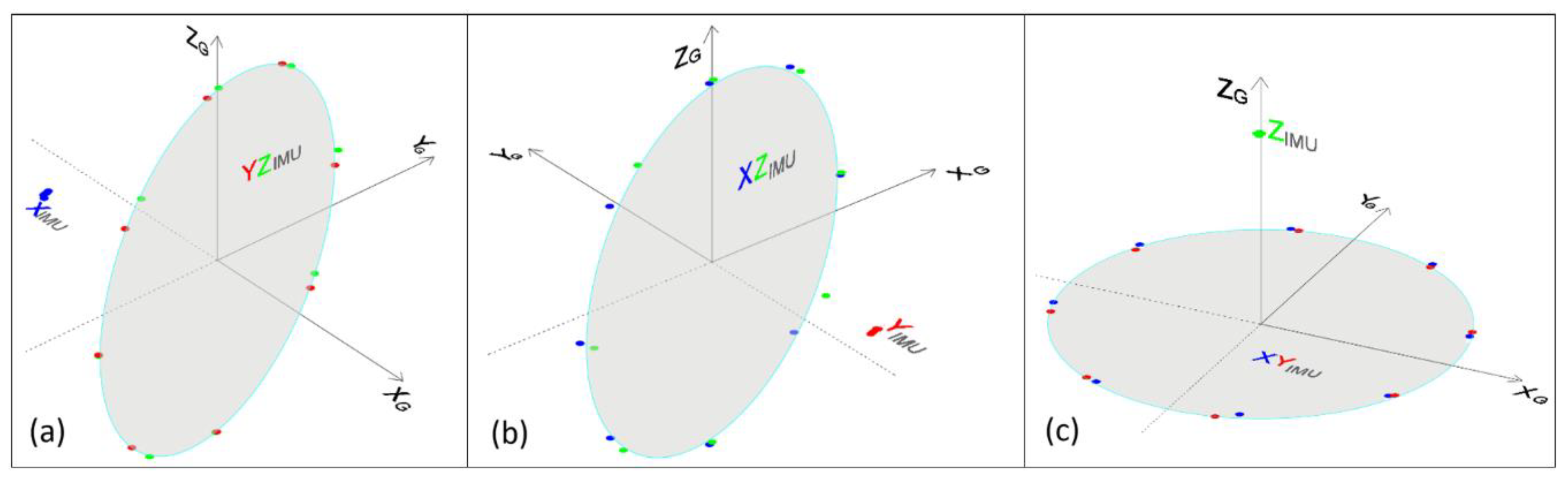
3.1. Development and Evaluation of the Fusion Method Using a Low-Cost Sensor System and a Custom Software Utility
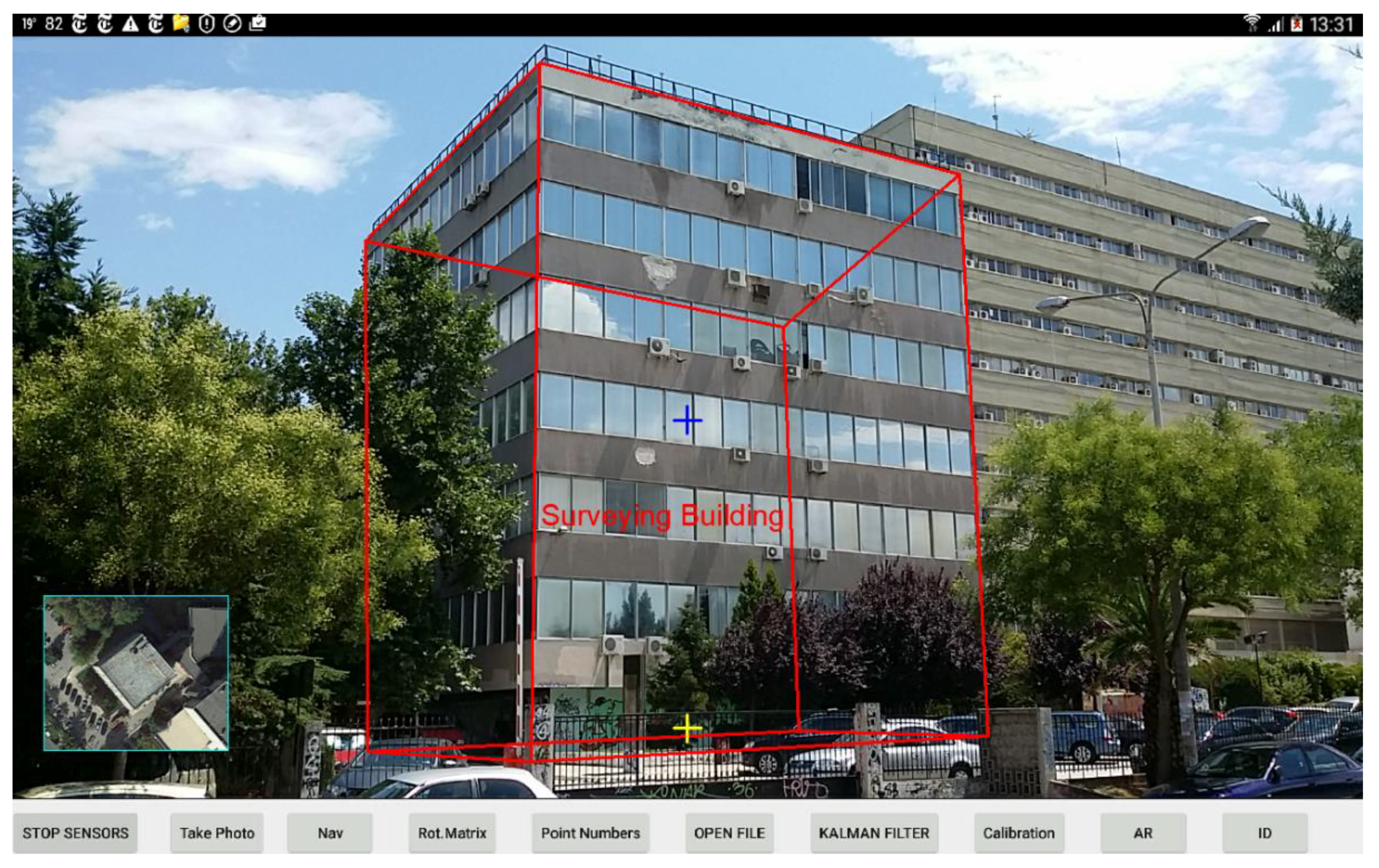
3.2. Evaluation of the Fusion Method on a Mobile Device and an AR Application
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Patias, P.; Tsioukas, V.; Pikridas, C.; Patonis, F.; Georgiadis, C. Robust pose estimation through visual/GNSS mixing. In Proceedings of the 22nd International Conference on Virtual System & Multimedia (VSMM), Kuala Lumpur, Malaysia, 17–21 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Portalés, C.; Lerma, J.L.; Navarro, S. Augmented reality and photogrammetry: A synergy to visualize physical and virtual city environments. ISPRS J. Photogramm. Remote Sens. 2010, 65, 134–142. [Google Scholar] [CrossRef]
- Smart, P.D.; Quinn, J.A.; Jones, C.B. City model enrichment. ISPRS J. Photogramm. Remote Sens. 2011, 66, 223–234. [Google Scholar] [CrossRef]
- Dabove, P.; Ghinamo, G.; Lingua, A.M. Inertial Sensors for Smart Phones Navigation. SpringerPlus 2015, 4, 834. [Google Scholar] [CrossRef] [PubMed]
- Patonis, P. Combined Technologies of Low-cost Inertial Measurement Units and the Global Navigation Satellite System for Photogrammetry Applications. Ph.D. Thesis, Aristotle University of Thessaloniki, Thessaloniki, Greece, 2012. [Google Scholar] [CrossRef]
- Sherry, L.; Brown, C.; Motazed, B.; Vos, D. Performance of automotive-grade MEMS sensors in low cost AHRS for general aviation. In Proceedings of the Digital Avionics Systems Conference, Indianapolis, IN, USA, 12–16 October 2003. [Google Scholar] [CrossRef]
- Patonis, P. Mobile Computing ‘Systems On Chip’: Application on Augmented Reality. Master’s Thesis, University of Macedonia, Thessaloniki, Greece, 2016. [Google Scholar]
- Grewal, M.S.; Weill, L.R.; Andrews, A.P. Global Positioning Systems. Inertial Navigation and Integration, 2nd ed.; John Wiley & Sons Inc.: New York, NY, USA, 2007; p. 279. [Google Scholar]
- Frosio, I.; Pedersini, F.; Borghese, N.A. Autocalibration of MEMS Accelerometers. IEEE Trans. Instrum. Meas. 2009, 58, 2034–2041. [Google Scholar] [CrossRef]
- Aicardi, I.; Dabove, P.; Lingua, A.; Piras, M. Sensors Integration for Smartphone Navigation: Performances and Future Challenges. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 9. [Google Scholar] [CrossRef]
- Fong, W.T.; Ong, S.K.; Nee, A.Y.C. Methods for In-field User Calibration of an Inertial Measurement Unit without External Equipment. Meas. Sci. Technol. 2008, 19, 817–822. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P. Calibration of a MEMS Inertial Measurement Unit. In Proceedings of the XVII IMEKO World Congress on Metrology for a Sustainable Development, Rio de Janeiro, Brazil, 17–22 September 2006. [Google Scholar]
- VectorNav. VectorNav Technologies. 2018. Available online: http://www.vectornav.com (accessed on 25 May 2018).
- Patonis, P.; Patias, P.; Tziavos, I.N.; Rossikopoulos, D. A methodology for the performance evaluation of low-cost accelerometer and magnetometer sensors in geomatics applications. Geo-Spat. Inf. Sci. 2018, 21, 139–148. [Google Scholar] [CrossRef] [Green Version]
- Miller, J. Mini Rover 7 Electronic Compassing for Mobile Robotics. Circuit Cellar Mag. Comput. Appl. 2004, 165, 14–22. [Google Scholar]
- Kozak, J.; Friedrich, D. Quaternion: An Alternate Approach to Medical Navigation. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering, Munich, Germany, 7–12 September 2009. [Google Scholar]
- Hol, J.D.; Schon, T.B.; Gustafsson, F.; Slycke, P.J. Sensor Fusion for Augmented Reality. In Proceedings of the 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. Pose Estimation of a Mobile Robot Based on Fusion of IMU Data and Vision Data Using an Extended Kalman Filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Kalman-Filter-Based Orientation Determination Using Inertial/Magnetic Sensors: Observability Analysis and Performance Evaluation. Sensors 2011, 11, 9182–9206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, K.; Li, J.; Zhang, X.; Shen, C.; Bi, Y.; Zheng, T.; Liu, J. A New Quaternion-Based Kalman Filter for Real-Time Attitude Estimation Using the Two-Step Geometrically-Intuitive Correction Algorithm. Sensors 2017, 17, 2146. [Google Scholar] [CrossRef] [PubMed]
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A complementary filter for attitude estimation of a fixed-wing UAV. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 340–345. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef] [Green Version]
- Jurman, D.; Jankovec, M.; Kamnik, R.; Topic, M. Calibration and data fusion solution for the miniature attitude and heading reference system. Sens. Actuators A 2007, 138, 411–420. [Google Scholar] [CrossRef]
- Premerlani, W.; Bizard, P. Direction Cosine Matrix IMU: Theory. DIY DRONE: USA. 2009, pp. 13–17. Available online: http://owenson.me/build-your-own-quadcopter-autopilot/DCMDraft2.pdf (accessed on 4 December 2015).
- Starlino Electronics. 2016. Available online: http://www.starlino.com/imu_guide.html/ (accessed on 15 December 2016).
- Tuck, K. Tilt Sensing Using Linear Accelerometers, Freescale Semiconductor. Appl. Note Rev. 2007, 2, 3–4. [Google Scholar]
- Caruso, M.J. Applications of Magnetic Sensors for Low cost Compass Systems. In Proceedings of the Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000. [Google Scholar] [CrossRef]
- Kang, H.J.; Phuong, N.; Suh, Y.S.; Ro, Y.S. A DCM Based Orientation Estimation Algorithm with an Inertial Measurement Unit and a Magnetic Compass. J. Univers. Comput. Sci. 2009, 15, 859–876. [Google Scholar]
- Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 1–35. [Google Scholar]
- Rönnbäck, S. Development of a INS/GPS navigation loop for an UAV. Master’s Thesis, Lulea University of Technology, Sydney, Australia, 2000. [Google Scholar]
- Schwarz, K.; Wong, R.; Tziavos, I.N. Final Report on Common Mode Errors in Airborne Gravity Gradiometry; Internal Technical Report; University of Calgary: Calgary, AB, Canada, 1987. [Google Scholar]
- Simon, D. Kalman Filtering. Embedded Syst. Program. 2001, 14, 72–79. [Google Scholar]
- Brown, R.; Hwang, P. Introduction to Random Signals and Applied Kalman Filtering, 2nd ed.; John Wiley & Sons Inc.: New York, NY, USA, 1992. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter. 2006. Available online: https://www.researchgate.net/publication/200045331_An_Introduction_to_the_Kalman_Filter (accessed on 20 July 2017).
- Dermanis, Α. Adjustment of Observations and Estimation Theory; Ziti: Thessaloniki, Greece, 1986; Volume 1. [Google Scholar]
- Xsens. 2018. Available online: https://www.xsens.com/products/mti-100-series/ (accessed on 12 July 2018).
- Google and Open Handset Alliance n.d. Android API Guide. Available online: https://developer.android.com/guide/components/services (accessed on 25 May 2018).
- Google and Open Handset Alliance n.d. Android API Guide. Available online: https://developer.android.com/guide/components/aidl (accessed on 25 May 2018).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | 12” tablet |
| Storage | 32 GB |
| CPU | Quad 2.3 GHz |
| Primary Camera | CMOS, 8 MP (3264 × 2448 pixels) |
| RAM | 3 GB |
| Display | TFT 2560 × 1600 (WQXGA) 12.2”, 16 million colors |
| Accelerometers | Type: BMI055, Mfr: Bosch Sencortec, Ver: 1, Resolution: 0.038, Rate: 100 Hz, Unit: m/s2 |
| Gyroscopes | Type: BMI055, Mfr: Bosch Sencortec, Ver: 1, Resolution: 2.66316E-4, Rate: 200 Hz, Unit: rad/s |
| Magnetometers | Type: AK8963C magnetic field sensor, Mfr: Asahi, Kasei Microdevices, Ver: 1, Resolution: 0.060, Rate: 50 Hz, Unit: μT |
| Operating Rate Mode | Sensor | Rate (Hz) | Type of Use | Events/s | CPU Usage (%) |
|---|---|---|---|---|---|
| NORMAL | Accelerometer Gyroscope Magnetometer | 15 5 5 | Rate (default) suitable for screen orientation changes | 25 | 9 |
| UI | Accelerometer Gyroscope Magnetometer | 15 15 15 | Rate suitable for user interface | 45 | 10 |
| GAME | Accelerometer Gyroscope Magnetometer | 50 50 50 | Rate suitable for games | 150 | 13 |
| FASTEST | Accelerometer Gyroscope Magnetometer | 100 200 50 | Get sensor data as fast as possible | 350 | 15 |
| R11 | R21 | R31 | R12 | R22 | R23 | R31 | R32 | R33 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Rotation around XIMU axis | 1 | −0.9677 | −0.2519 | 0.0075 | 0.2520 | −0.9677 | 0.0016 | 0.0069 | 0.0034 | 1.0000 |
| 2 | −0.9666 | −0.2564 | 0.0047 | 0.2043 | −0.7588 | 0.6184 | −0.1550 | 0.5987 | 0.7858 | |
| 3 | −0.9712 | −0.2379 | 0.0100 | 0.0324 | −0.0907 | 0.9953 | −0.2359 | 0.9670 | 0.0958 | |
| 4 | −0.9648 | −0.2629 | 0.0087 | −0.1361 | 0.5273 | 0.8387 | −0.2251 | 0.8080 | −0.5446 | |
| 5 | −0.9658 | −0.2592 | 0.0089 | −0.2592 | 0.9658 | −0.0031 | −0.0078 | −0.0053 | −1.0000 | |
| 6 | −0.9621 | −0.2724 | −0.0124 | −0.2100 | 0.7690 | −0.6038 | 0.1740 | −0.5783 | −0.7971 | |
| 7 | −0.9678 | −0.2516 | 0.0068 | −0.0076 | 0.0021 | −1.0000 | 0.2516 | −0.9678 | −0.0040 | |
| 8 | −0.9609 | −0.2767 | 0.0093 | 0.1981 | −0.7106 | −0.6751 | 0.1934 | −0.6469 | 0.7376 | |
| Rotation around YIMU axis | 1 | −0.9781 | −0.2078 | 0.0101 | 0.2079 | −0.9782 | −0.0007 | 0.0100 | 0.0014 | 0.9999 |
| 2 | −0.7457 | −0.1457 | 0.6501 | 0.1863 | −0.9825 | −0.0065 | 0.6397 | 0.1163 | 0.7598 | |
| 3 | −0.0274 | −0.0149 | 0.9995 | 0.2218 | −0.9751 | −0.0085 | 0.9747 | 0.2214 | 0.0300 | |
| 4 | 0.5493 | 0.0849 | 0.8313 | 0.1682 | −0.9857 | −0.0105 | 0.8185 | 0.1456 | −0.5557 | |
| 5 | 0.9734 | 0.2285 | 0.0137 | 0.2287 | −0.9735 | −0.0088 | 0.0113 | 0.0117 | −0.9999 | |
| 6 | 0.6635 | 0.1952 | −0.7223 | 0.2716 | −0.9624 | −0.0107 | −0.6972 | −0.1891 | −0.6915 | |
| 7 | −0.0141 | 0.0002 | −0.9999 | 0.2889 | −0.9574 | −0.0042 | −0.9573 | −0.2889 | 0.0134 | |
| 8 | −0.7845 | −0.1990 | −0.5873 | 0.2443 | −0.9697 | 0.0022 | −0.5700 | −0.1418 | 0.8094 | |
| Rotation around ZIMU axis | 1 | −0.9722 | −0.2340 | 0.0077 | 0.2340 | −0.9722 | −0.0020 | 0.0080 | −0.0001 | 1.0000 |
| 2 | −0.8729 | 0.4878 | 0.0108 | −0.4878 | −0.8730 | 0.0022 | 0.0105 | −0.0034 | 0.9999 | |
| 3 | −0.3076 | 0.9515 | 0.0100 | −0.9515 | −0.3076 | −0.0037 | −0.0005 | −0.0107 | 0.9999 | |
| 4 | 0.4668 | 0.8841 | 0.0221 | −0.8842 | 0.4671 | −0.0087 | −0.0180 | −0.0154 | 0.9997 | |
| 5 | 0.9621 | 0.2717 | 0.0233 | −0.2718 | 0.9624 | 0.0025 | −0.0218 | −0.0088 | 0.9997 | |
| 6 | 0.8910 | −0.4536 | 0.0194 | 0.4537 | 0.8912 | 0.0014 | −0.0179 | 0.0075 | 0.9998 | |
| 7 | 0.3463 | −0.9380 | 0.0186 | 0.9380 | 0.3464 | 0.0072 | −0.0132 | 0.0150 | 0.9998 | |
| 8 | −0.4209 | −0.9071 | 0.0099 | 0.9071 | −0.4208 | 0.0092 | −0.0042 | 0.0128 | 0.9999 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patonis, P.; Patias, P.; Tziavos, I.N.; Rossikopoulos, D.; Margaritis, K.G. A Fusion Method for Combining Low-Cost IMU/Magnetometer Outputs for Use in Applications on Mobile Devices. Sensors 2018, 18, 2616. https://doi.org/10.3390/s18082616
Patonis P, Patias P, Tziavos IN, Rossikopoulos D, Margaritis KG. A Fusion Method for Combining Low-Cost IMU/Magnetometer Outputs for Use in Applications on Mobile Devices. Sensors. 2018; 18(8):2616. https://doi.org/10.3390/s18082616
Chicago/Turabian StylePatonis, Photis, Petros Patias, Ilias N. Tziavos, Dimitrios Rossikopoulos, and Konstantinos G. Margaritis. 2018. "A Fusion Method for Combining Low-Cost IMU/Magnetometer Outputs for Use in Applications on Mobile Devices" Sensors 18, no. 8: 2616. https://doi.org/10.3390/s18082616
APA StylePatonis, P., Patias, P., Tziavos, I. N., Rossikopoulos, D., & Margaritis, K. G. (2018). A Fusion Method for Combining Low-Cost IMU/Magnetometer Outputs for Use in Applications on Mobile Devices. Sensors, 18(8), 2616. https://doi.org/10.3390/s18082616