Decision Support System for Variable Rate Irrigation Based on UAV Multispectral Remote Sensing

Abstract
:1. Introduction
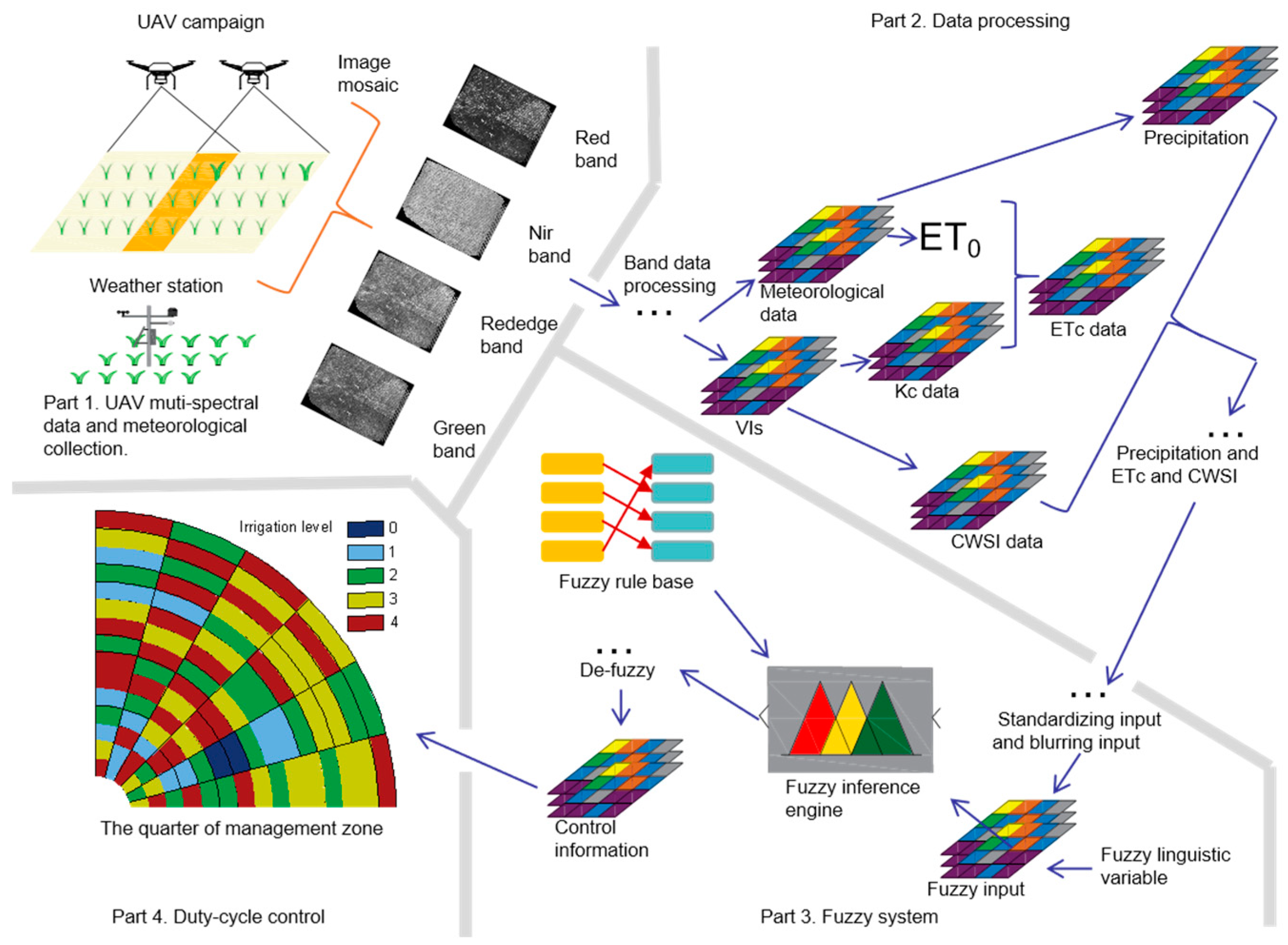
2. System Description and Operation
2.1. UAV Data Collection and Image Mosaic
2.2. Irrigation Decision Model Selected
2.2.1. Crop Water Evapotranspiration Model (ETc) and Crop Water Stress Index (CWSI)
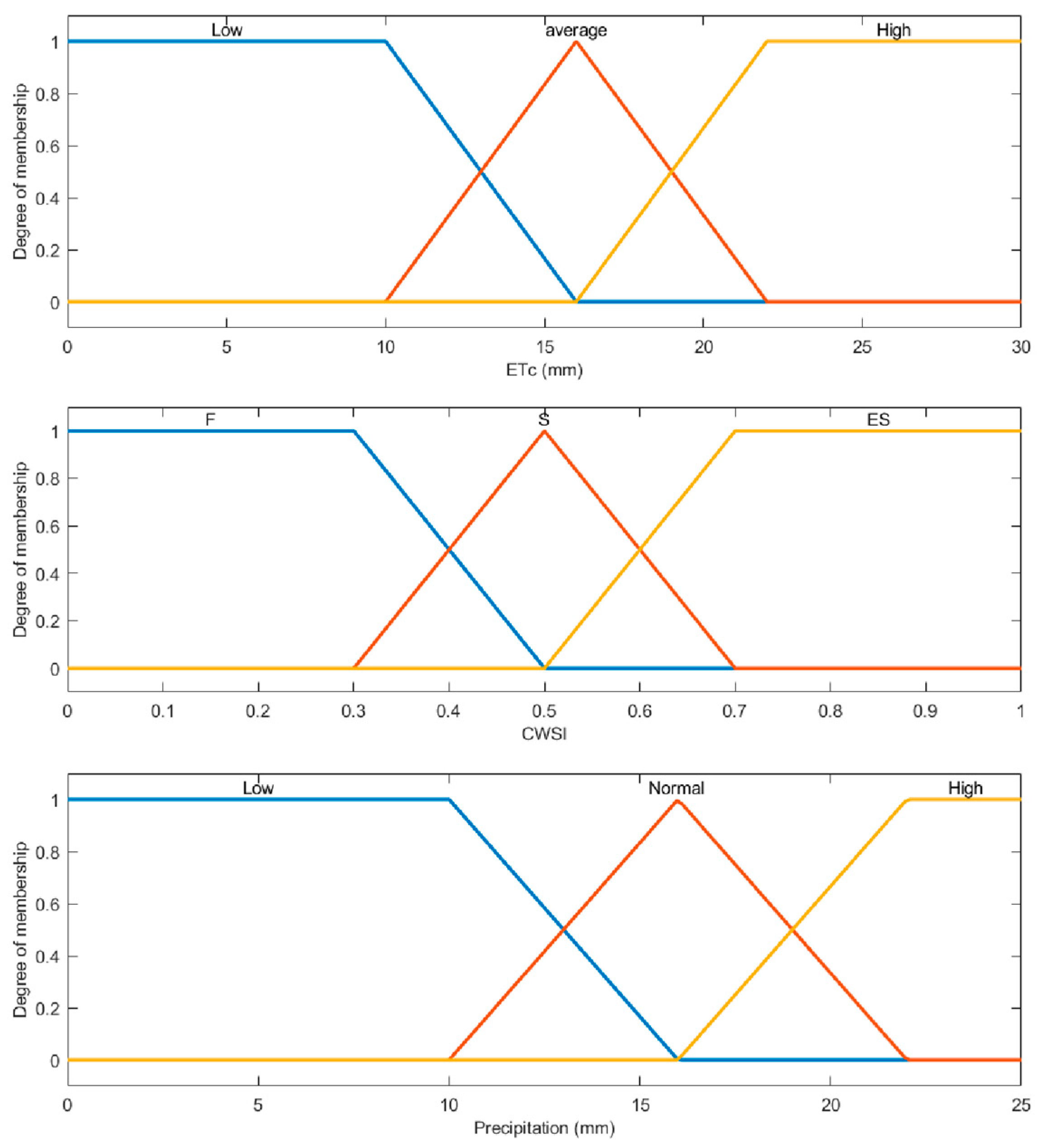
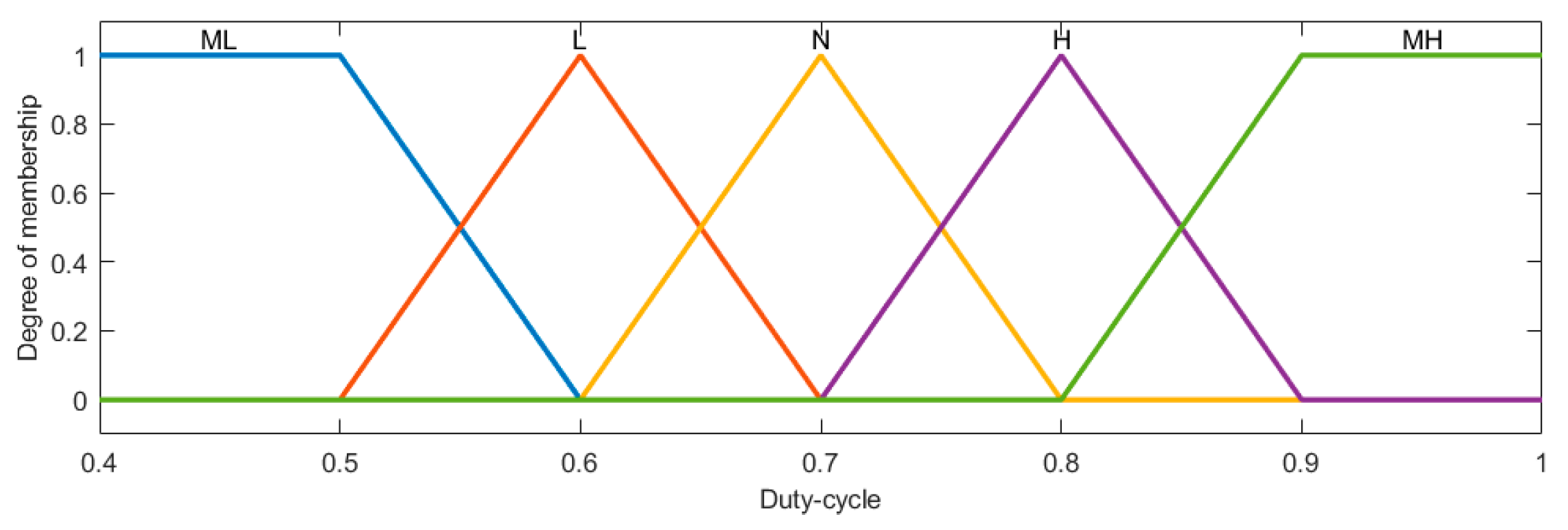
2.2.2. Fuzzy Logic Model
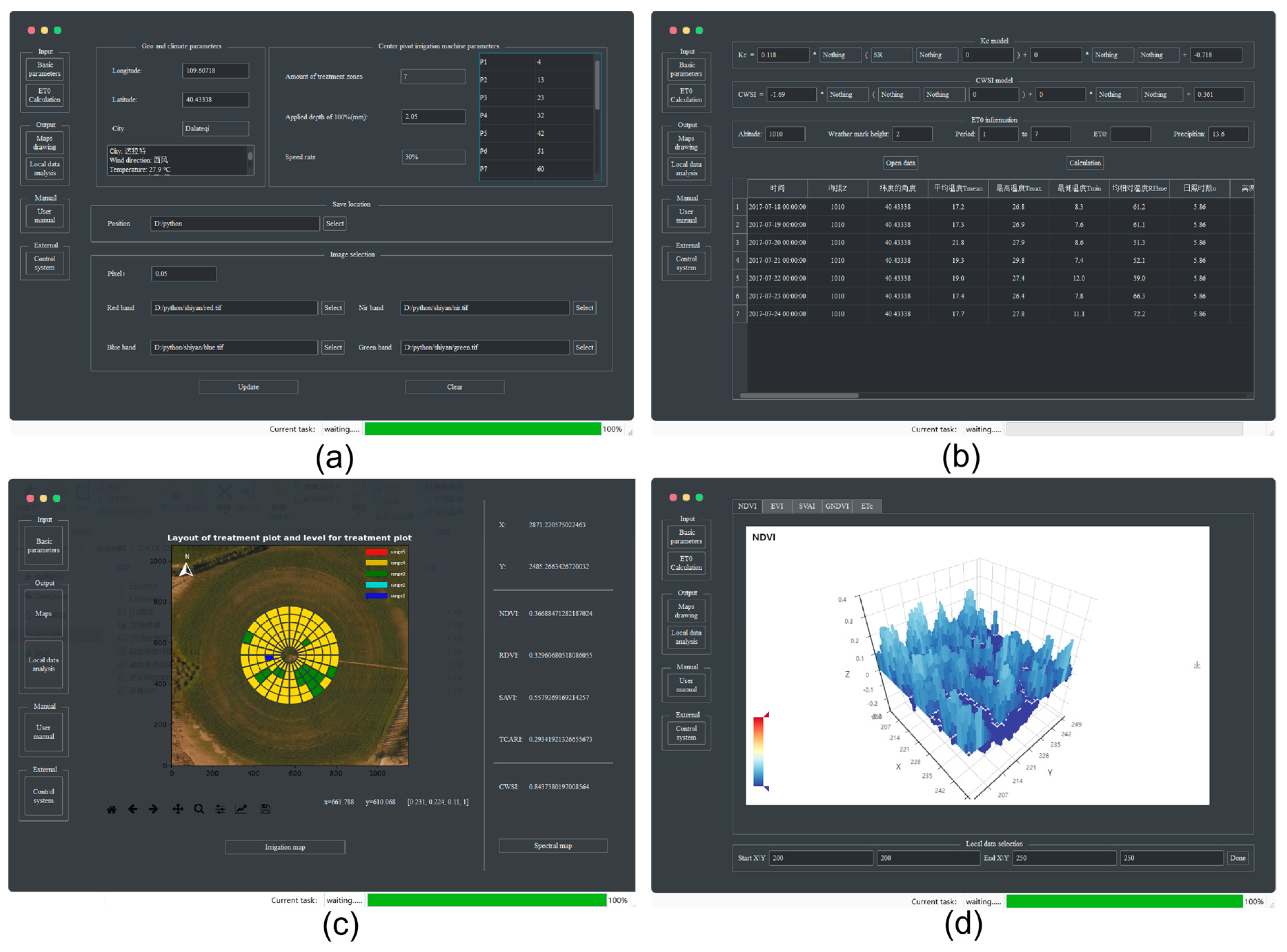
2.3. DSS-VRI Software Design and Operation
3. Application and Performance Evaluation for System
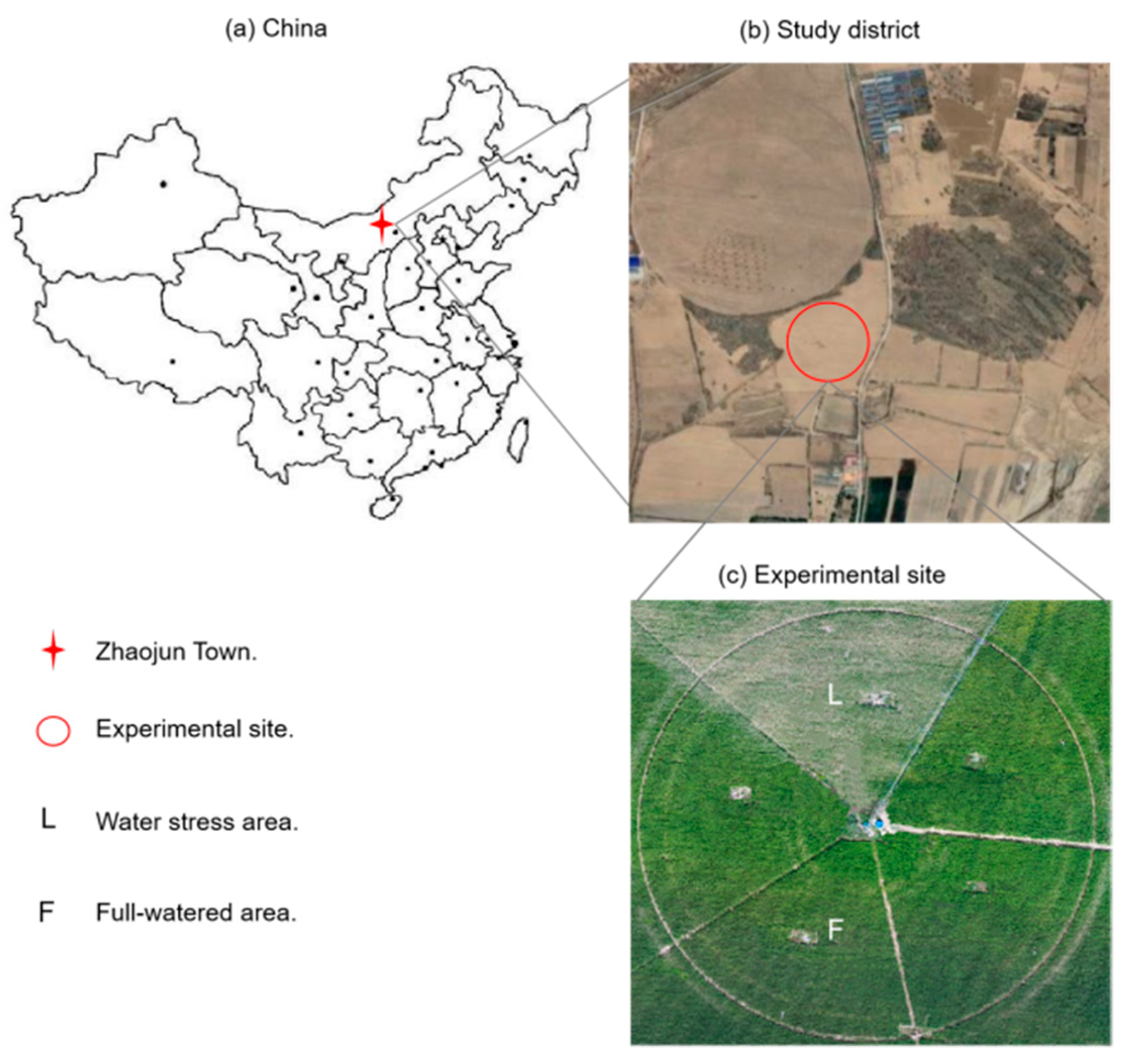
3.1. The Study Site Description
3.2. Experimental Design
3.2.1. Water Stress Treatment for Study Site
3.2.2. Parameter Setting
3.3. Results and Discussion
4. Conclusion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, W.; Li, J.; Li, Y. Review on Variable Rate Irrigation with Continuously Moving Sprinkler Machines. Trans. Chin. Soc. Agric. Eng. 2016, 32, 1–7. [Google Scholar] [CrossRef]
- Navarro-Hellin, H.; Martinez-del-Rincon, J.; Domingo-Miguel, R.; Soto-Valles, F.; Torres-Sanchez, R. A Decision Support System for Managing Irrigation in Agriculture. Comput. Electron. Agric. 2016, 124, 121–131. [Google Scholar] [CrossRef]
- Nain, A.S.; Singh, K.K. Conceptualization of a Framework of Decision Support System for Agriculture in Hilly Region. Mausam 2016, 67, 195–204. [Google Scholar]
- Miller, K.A.; Luck, J.D.; Heeren, D.M.; Lo, T.; Martin, D.L.; Barker, J.B. A Geospatial Variable Rate Irrigation Control Scenario Evaluation Methodology Based on Mining Root Zone Available Water Capacity. Precis. Agric. 2018, 19, 666–683. [Google Scholar] [CrossRef]
- Gelcer, E.; Fraisse, C.W.; Zotarelli, L.; Perondi, D.; Malia, H.A.; Ecole, C.C.; Migliaccio, K.W. A Smart Irrigation Tool to Determine the Effects of ENSO on Water Requirements for Tomato Production in Mozambique. Water 2018, 10, 1820. [Google Scholar] [CrossRef]
- Yang, G.; Liu, L.; Guo, P.; Li, M. A Flexible Decision Support System for Irrigation Scheduling in an Irrigation District in China. Agric. Water Manag. 2017, 179, 378–389. [Google Scholar] [CrossRef]
- Smith, R.C.G.; Steiner, J.L.; Meyer, W.S.; Erskine, D. Influence of Season to Season Variability in Weather on Irrigation Scheduling of Wheat: A Simulation Study. Irrig. Sci. 1985, 6, 241–251. [Google Scholar] [CrossRef]
- Sui, R.; Baggard, J. Wireless Sensor Network for Monitoring Soil Moisture and Weather Conditions. Appl. Eng. Agric. 2015, 31, 193–201. [Google Scholar] [CrossRef]
- O’Shaughnessy, S.A.; Evett, S.R.; Colaizzi, P.D. Infrared Thermometry as a Tool for Site-Specific Irrigation Scheduling. Wetting Front Soil Water Manag. Res. Unit Newslet. 2014, 136–145. [Google Scholar]
- Morari, F.; Giardini, L. Irrigation Automation with Heterogeneous Vegetation: The Case of The Padova Botanical Garden. Agric. Water Manag. 2002, 55, 183–201. [Google Scholar] [CrossRef]
- Ren, W.; Wu, D.; Qin, L. Preliminary Study on Data Collecting and Processing of Unmanned Airship Low Altitude Hyperspectral Remote Sensing. Ecol. Environ. Monit. Three Gorges 2016, 1, 52–57. [Google Scholar] [CrossRef]
- Zhang, Z.; Bian, J.; Han, W.; Fu, Q.; Chen, S.; Cui, T. Cotton Moisture Stress Diagnosis Based on Canopy Temperature Characteristics Calculated from UAV Thermal Infrared Image. Trans. Chin. Soc. Agric. Eng. 2018, 34, 77–84. [Google Scholar] [CrossRef]
- Ribeiro-Gomes, K.; Hernandez-Lopez, D.; Ortega, J.F.; Ballesteros, R.; Poblete, T.; Moreno, M.A. Uncooled Thermal Camera Calibration and Optimization of the Photogrammetry Process for UAV Applications in Agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, H.; Niu, Y.; Han, W. Mapping Maize Water Stress Based on UAV Multispectral Remote Sensing. Remote Sens. 2019, 11, 605. [Google Scholar] [CrossRef]
- Calera, A.; Campos, I.; Osann, A.; D’Urso, G.; Menenti, M. Remote Sensing for Crop Water Management: From ET Modelling to Services for the End Users. Sensors 2017, 17, 1104. [Google Scholar] [CrossRef]
- Bastiaanssen, W.G.M.; Menenti, M.; Feddes, R.A.; Holtslag, A.A.M. A remote sensing surface energy balance algorithm for land (SEBAL). 1. Formulation. J. Hydrol. 1998, 212, 198–212. [Google Scholar] [CrossRef]
- Ihuoma, S.O.; Madramootoo, C.A. Recent advances in crop water stress detection. Comput. Electron. Agric. 2017, 141, 267–275. [Google Scholar] [CrossRef]
- Matsushita, B.; Yang, W.; Chen, J.; Onda, Y.; Qiu, G. Sensitivity of the enhanced vegetation index (EVI) and normalized difference vegetation index (NDVI) to topographic effects: A case study in high-density cypress forest. Sensors 2007, 7, 2636–2651. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of vegetation indices and a modified simple ratio for boreal applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- Wang, F.M.; Huang, J.F.; Tang, Y.L.; Wang, X.Z. New vegetation index and its application in estimating leaf area index of rice. Rice Sci. 2007, 21, 159–166. [Google Scholar] [CrossRef]
- Schneider, P.; Roberts, D.A.; Kyriakidis, P.C. A VARI-Based Relative Greenness from MODIS Data for Computing the Fire Potential Index. Remote Sens. Environ. 2008, 112, 1151–1167. [Google Scholar] [CrossRef]
- LaRue, J.; Evans, R.; Sidney, M. Considerations for Variable Rate Irrigation. In Proceedings of the 24th Annual Central Plains Irrigation Conference, Colby, Kansas, 21–22 February 2012. [Google Scholar]
- Fattahi, K.; Babazadeh, H.; Najafi, P.; Sedghi, H. Scheduling Maize Irrigation Based on Crop Water Stress Index (CWSI). Appl. Ecol. Environ. Res. 2018, 16, 7535–7549. [Google Scholar] [CrossRef]
- da Silva, C.J.; da Silva, C.A.; de Freitas, C.A.; Golynski, A.; da Silva, L.F.; Frizzone, J.A. Tomato Water Stress Index as a Function of Irrigation Depths. Rev. Bras. De Eng. Agrícola E Ambient. 2018, 22, 95–100. [Google Scholar] [CrossRef]
- Pimpale, A.; Rajankar, P.; Wadatkar, S.; Wanjari, S.; Ramteke, I. Estimation of water requirement of wheat using multispectral vegetation indices. J. Agrometeorol. 2015, 17, 208–212. [Google Scholar]
- Al-Faraj, A.; Meyer, G.E.; Horst, G.L. A crop water stress index for tall fescue (Festuca arundinacea Schreb.) irrigation decision-making—A traditional method. Comput. Electron. Agric. 2001, 31, 107–124. [Google Scholar] [CrossRef]
- Salman, M.; Ozdemir, S.; Celebi, F. Fuzzy traffic control with vehicle-to-everything communication. Sensors 2018, 18, 368. [Google Scholar] [CrossRef]
- Thangavadivelu, S.; Colvin, T.S. Fuzzy-logic-based decision support system for scheduling tillage operations. Eng. Appl. Artif. Intell. 1997, 10, 463–472. [Google Scholar] [CrossRef]
- Han, W.T.; Shao, G.M.; Ma, D.J. Estimating method of crop coefficient of maize based on UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Mach. 2018, 49, 134–143. [Google Scholar] [CrossRef]
- Mendes, W.R.; Araújo, F.M.U.; Dutta, R.; Heeren, D.M. Fuzzy control system for variable rate irrigation using remote sensing. Expert Syst. Appl. 2019, 124, 13–24. [Google Scholar] [CrossRef]
- Berkan, R.C.; Trubatch, S. Fuzzy System Design Principles; Wiley-IEEE Press: Hoboken, NJ, USA, 1997. [Google Scholar]
- Hu S., Z. Analysis on Distribution Characteristics of The Reference Crops Evapotranspiration (ET0) Base on GIS in Inner Mongolia. Ph.D. Thesis, Inner Mongolia Agricultural University, Inner Mongolia, China, 2010. [Google Scholar]
- Hoffmann, H.; Jensen, R.; Thomsen, A.; Nieto, H.; Rasmussen, J.; Friborg, T. Crop Water Stress Maps for an Entire Growing Season from Visible and Thermal UAV Imagery. Biogeosciences 2016, 13, 6545. [Google Scholar] [CrossRef]
- Payero, J.; Neale, C.; Wright, J. Non-Water-Stressed Baselines for Calculating Crop Water Stress Index (CWSI) for Alfalfa and Tall Fescue Grass. Trans. ASAE 2005, 48, 653–661. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Bands | Blue (475 nm), Green (560 nm), Red (668 nm), Near infrared (Nir) (840 nm), Red-edge (717 nm) |
| Focal length | 5.5 mm (fixed lens) |
| Angle of view | 47.2° |
| Weight | 150 g |
| Image resolution | 1280 × 960 mm |
| n | Rule |
|---|---|
| 1 | (ETc==Low) & (Precipitation==Low) & (CWSI==F) => (Duty-cycle=ML) |
| 2 | (ETc==Low) & (Precipitation==Low) & (CWSI==S) => (Duty-cycle=N) |
| 3 | (ETc==Low) & (Precipitation==Low) & (CWSI==ES) => (Duty-cycle=MH) |
| ... | ... |
| 13 | (ETc==average) & (Precipitation==Normal) & (CWSI==F) => (Duty-cycle=ML) |
| 14 | (ETc==average) & (Precipitation==Normal) & (CWSI==S) => (Duty-cycle=N) |
| 15 | (ETc==average) & (Precipitation==Normal) & (CWSI==ES) => (Duty-cycle=MH) |
| ... | ... |
| 25 | (ETc==High) & (Precipitation==Normal) & (CWSI==ES) => (Duty-cycle=MH) |
| 26 | (ETc==High) & (Precipitation==High) & (CWSI==S) => (Duty-cycle=L) |
| 27 | (ETc==High) & (Precipitation==High) & (CWSI==ES) => (Duty-cycle=N) |
| Dependent Variable | Vegetation Index | Fitted Formulas | R2 | RMSE |
|---|---|---|---|---|
| Kc | NDVI | y = 6.237x − 4.534 | 0.67 | 0.1695 |
| SAVI | y = 6.164x − 3.016 | 0.57 | 0.1926 | |
| EVI | y = 3.500x − 1.681 | 0.37 | 0.2338 | |
| SR | y = 0.118x − 0.718 | 0.85 | 0.1142 | |
| GNDVI | y = 4.399x − 0.961 | 0.80 | 0.1311 | |
| VARI | y = 4.266x − 0.697 | 0.71 | 0.1569 | |
| CWSI | NDVI | y = −1.819x + 1.12 | 0.72 | 0.046 |
| SAVI | y = −1.69x + 0.361 | 0.81 | 0.037 |
| Type | Value | Set time | Source |
|---|---|---|---|
| Coordinate | 109.60718E | Fixed | GPS |
| 40.43338N | |||
| Treatment zone * | 24 (0–15°, ..., 345–360°) | Fixed | User |
| Treatment zone ** | 6 (4,13,23,32,42,51,60) | 2017.8.28 | User |
| Water application depth of 100% | 2.05 mm | Fixed | Sprinkler parameters |
| Speed rate | 20% | 2017.8.28 | Sprinkler parameters |
| Input image | red, nir, blue and green bands | Remote sensing image | |
| SR-Kc | y = 0.118x − 0.718 | 2017.6.11–2017.8.27 | Table 3 |
| SAVI-CWSI | y = −1.69x + 0.361 | Table 3 | |
| ET0 | 16.3 mm | Meteorological data Meteorological data | |
| Precipitation | 13.6 mm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Han, W.; Zhao, T.; Tang, J. Decision Support System for Variable Rate Irrigation Based on UAV Multispectral Remote Sensing. Sensors 2019, 19, 2880. https://doi.org/10.3390/s19132880
Shi X, Han W, Zhao T, Tang J. Decision Support System for Variable Rate Irrigation Based on UAV Multispectral Remote Sensing. Sensors. 2019; 19(13):2880. https://doi.org/10.3390/s19132880
Chicago/Turabian StyleShi, Xiang, Wenting Han, Ting Zhao, and Jiandong Tang. 2019. "Decision Support System for Variable Rate Irrigation Based on UAV Multispectral Remote Sensing" Sensors 19, no. 13: 2880. https://doi.org/10.3390/s19132880
APA StyleShi, X., Han, W., Zhao, T., & Tang, J. (2019). Decision Support System for Variable Rate Irrigation Based on UAV Multispectral Remote Sensing. Sensors, 19(13), 2880. https://doi.org/10.3390/s19132880