An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning


Abstract
:1. Introduction
2. Data Collection
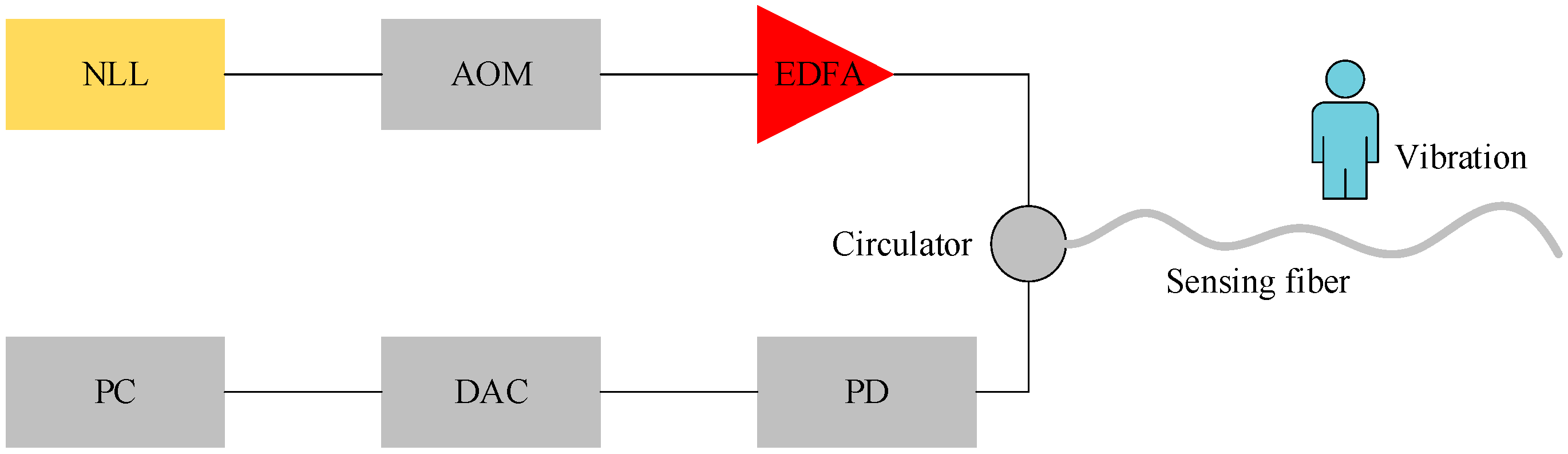
2.1. The Distributed Optical Fiber Sensing System
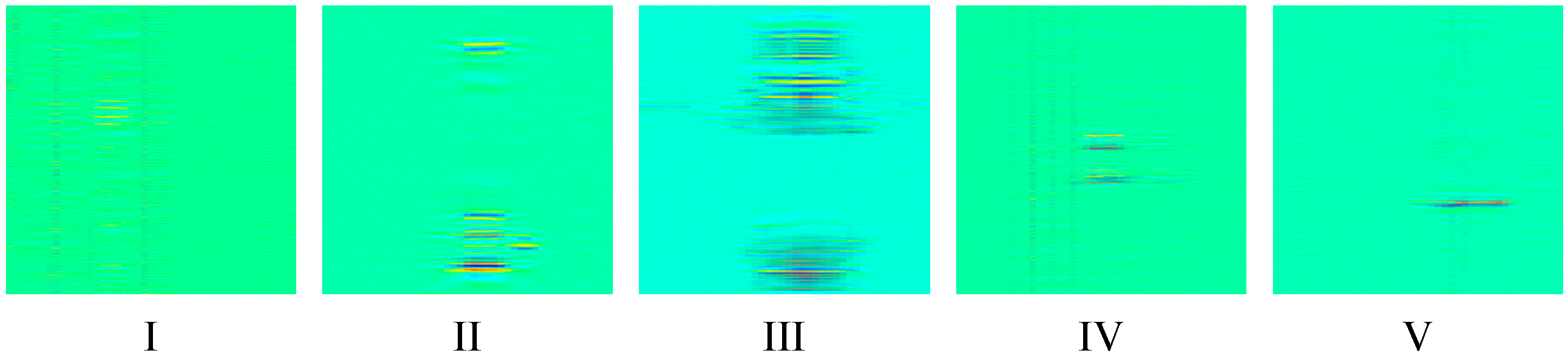
- I.
- BackgroundInstead of artificially adding disturbance, just collecting the noise of the environment.
- II.
- WalkingOne person walks near the sensing fiber. The walking speed is about 1.2 m per second.
- III.
- JumpingOne person jumps near the sensing fiber at a rate of about once a second.
- IV.
- Beating with a shovelOne person takes a shovel to tap earth surface near the sensing fiber at a rate of about once a second.
- V.
- Digging with a shovelOne person takes a shovel to dig near the sensing fiber at a rate of about once a second.
2.2. Data Pre-Processing
3. Event Recognition
3.1. Comparison of Common CNNs
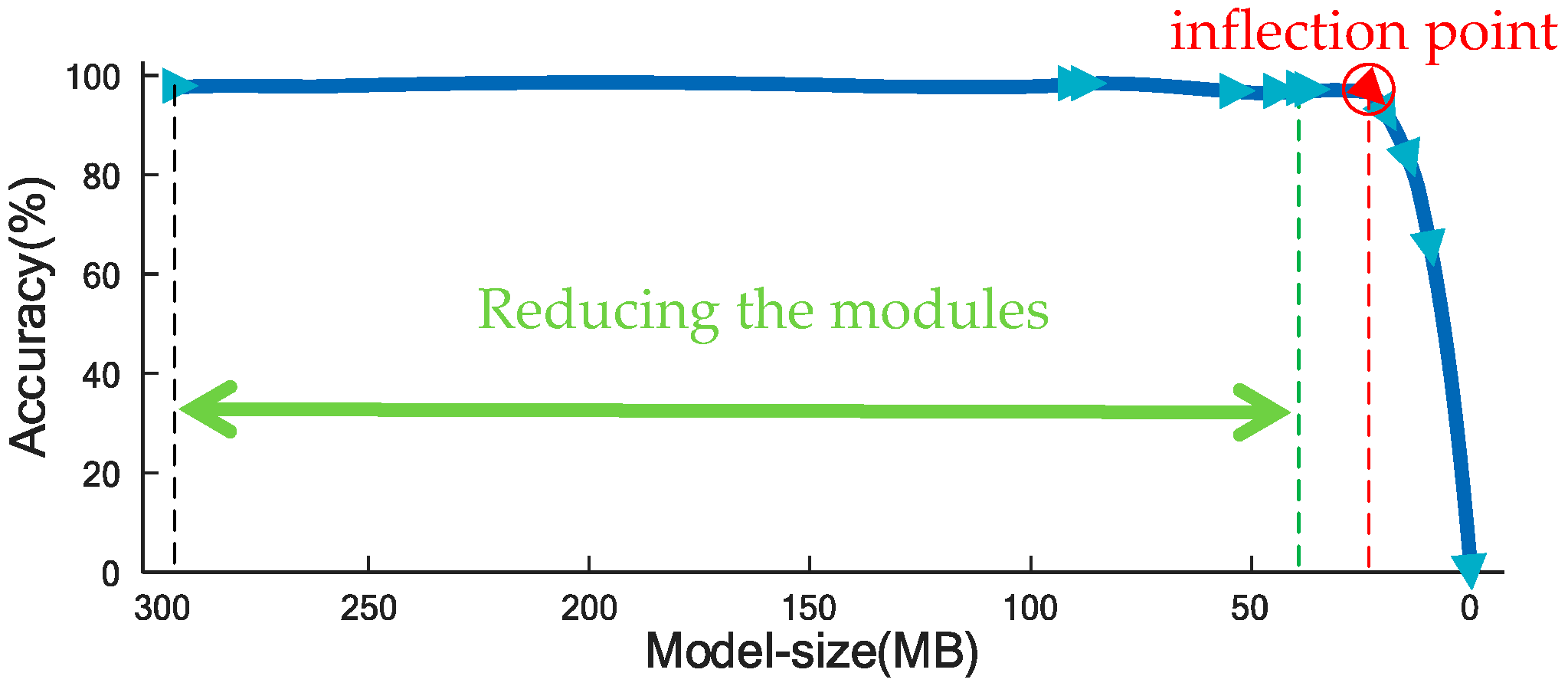
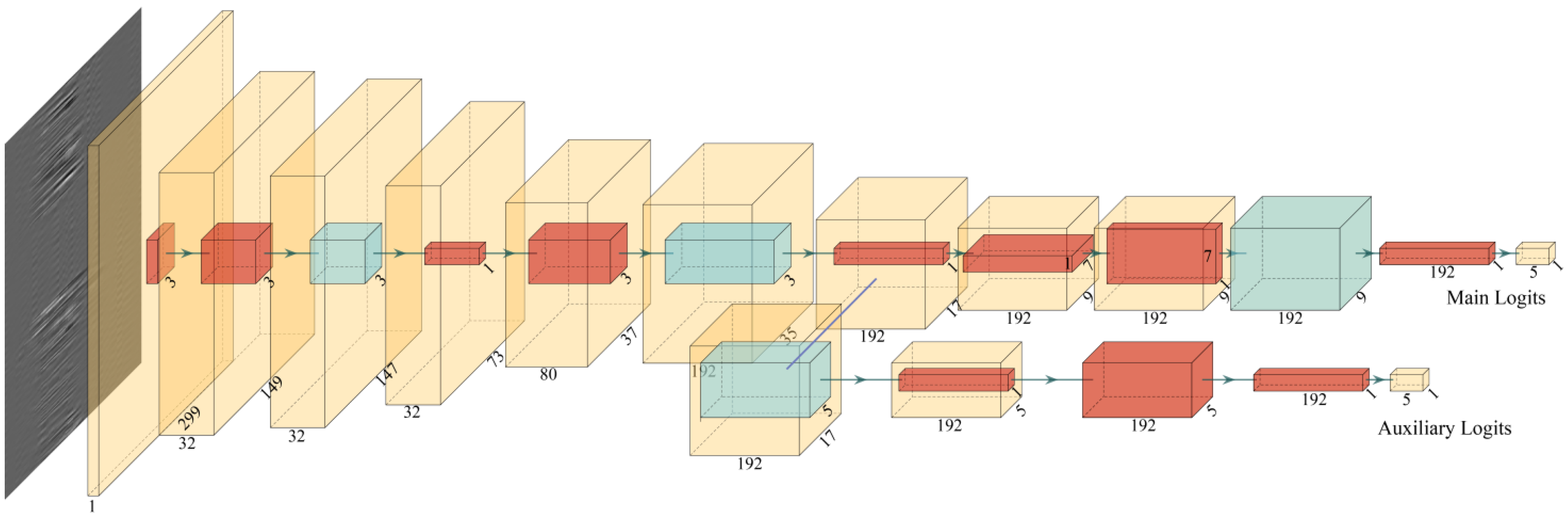
3.2. Optimization of CNN
4. Analysis of Classification Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed Fiber-Optic Intrusion Sensor System. J. Lightwave Technol. 2005, 23, 2081–2087. [Google Scholar] [CrossRef]
- Tejedor, J.; Martins, H.F.; Piote, D.; Macias-Guarasa, J.; Pastor-Graells, J.; Martin-Lopez, S.; Guillén, P.C.; De Smet, F.; Postvoll, W.; González-Herráez, M. Towards Prevention of Pipeline Integrity Threats using a Smart Fiber Optic Surveillance System. J. Lightwave Technol. 2016, 34, 4445–4453. [Google Scholar] [CrossRef]
- Juarez, J.C.; Taylor, H.F. Field test of a distributed fiber-optic intrusion sensor system for long perimeters. Appl. Opt. 2007, 46, 1968–1971. [Google Scholar] [CrossRef] [PubMed]
- Lv, A.; Jing, L. On-line monitoring system of 35 kV 3-core submarine power cable based on φ-OTDR. Sens. Actuators A Phys. 2018, 273, 134–139. [Google Scholar] [CrossRef]
- Fu, Y.; Wang, Z.; Zhu, R.; Xue, N.; Jiang, J.; Lu, C.; Zhang, B.; Yang, L.; Atubga, D.; Rao, Y. Ultra-Long-Distance Hybrid BOTDA/Φ-OTDR. Sensors 2018, 18, 976. [Google Scholar] [CrossRef] [PubMed]
- Ma, G.M.; Shi, C.; Qin, W.Q.; Li, Y.; Zhou, H.; Li, C.R. A Non-Intrusive Electrical Discharge Localization Method for Gas Insulated Line Based on Phase-Sensitive OTDR and Michelson Interferometer. IEEE Trans. Power Deliv. 2019, 34, 1324–1331. [Google Scholar] [CrossRef]
- Liehr, S.; Münzenberger, S.; Krebber, K. Wavelength-scanning coherent OTDR for dynamic high strain resolution sensing. Opt. Express 2018, 26, 10573–10588. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Fan, X.; Liu, Q.; He, Z. Frequency Response Enhancement of Direct-detection Phase-Sensitive OTDR by using Frequency Division Multiplexing. J. Lightwave Technol. 2018, 36, 1197–1203. [Google Scholar] [CrossRef]
- Vries, J. A low-cost fence impact classification system with neural networks. In Proceedings of the 7th AFRICON Conferencein Africa, Gaborone, Botswana, 15–17 September 2004; pp. 131–136. [Google Scholar]
- Jiang, L.H.; Liu, X.M.; Zhang, F. Multi-target recognition used in airpoty fiber fence warning system. In Proceedings of the 2010 International Conference on Machine Learning and Cybernetics, Qingdao, China, 11–14 July 2010; pp. 1126–1129. [Google Scholar]
- Min, H.K.; Lee, C.Y.; Lee, J.S.; Park, C.H. Abnormal signal detection in gas pipes using neural networks. In Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 2503–2508. [Google Scholar]
- Zhu, H.; Pan, C.; Sun, X. Vibration pattern recognition and classification in OTDR based distributed optical-fiber vibration sensing system. In Proceedings of the Smart Sensor Phenomena, Technology, Networks, and Systems Integration 2014, San Diego, CA, USA, 9 March 2014. [Google Scholar]
- Zhang, Y.; Lou, S.; Liang, S.; Wang, P. Study of pattern recognition based on multicharacteristic parameters for φ-OTDR distributed optical fiber sensing system. Chin. J. Lasers 2015, 42, 134–142. [Google Scholar]
- Jiang, F.; Li, H.; Zhang, Z.; Zhang, X. An event recognition method for fiber distributed acoustic sensing systems based on the combination of MFCC and CNN. In Proceedings of the International Conference on Optical Instruments and Technology: Advanced Optical Sensors and Applications, Beijing, China, 10 January 2018; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10618, p. 1061804. [Google Scholar]
- Sun, Q.; Feng, H.; Yan, X.; Zeng, Z. Recognition of a Phase-Sensitivity OTDR Sensing System Based on Morphologic Feature Extraction. Sensors 2015, 15, 15179–15197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, P. Graphic Deep Learning and Neural Network; Electronic Industry Press: Beijing, China, 2018. [Google Scholar]
- Liehr, S.; Jäger, L.A.; Karapanagiotis, C.; Münzenberger, S.; Kowarik, S. Real-time dynamic strain sensing in optical fibers using artificial neural networks. Opt. Express 2019, 27, 7405–7425. [Google Scholar] [CrossRef] [PubMed]
- Aktas, M.; Akgun, T.; Demircin, M.U.; Buyukaydin, D. Deep learning based multi-threat classification for phase-OTDR fiber optic distributed acoustic sensing applications. SPIE Commer. Sci. Sens. Imaging 2017, 10208, 102080. [Google Scholar]
- Wu, H.; Chen, J.; Liu, X.; Xiao, Y.; Wang, M.; Zheng, Y.; Rao, Y.J. 1-D CNN based intelligent recognition of vibrations in pipeline monitoring with DAS. J. Lightwave Technol. 2019, 37. [Google Scholar] [CrossRef]
- Shiloh, L.; Eyal, A.; Giryes, R. Deep learning approach for processing fiber-optic DAS seismic data. In Proceedings of the 26th International Conference on Optical Fiber Sensors (Optical Society of America, 2018), Lausanne, Switzerland, 24–28 September 2018. [Google Scholar]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Corredera, P.; Martin-Lopez, S. Machine Learning Methods for Pipeline Surveillance Systems Based on Distributed Acoustic Sensing: A Review. Appl. Sci. 2017, 7, 841. [Google Scholar] [CrossRef]
- Wu, H.; Zhao, C.; Liao, R.; Chang, Y.; Tang, M. Performance enhancement of ROTDR using deep convolutional neural networks. In Proceedings of the 26th International Conference on Optical Fiber Sensors (Optical Society of America, 2018), Lausanne, Switzerland, 24–28 September 2018. [Google Scholar]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Yazan, E.; Talu, M.F. Comparison of the stochastic gradient descent based optimization techniques. In Proceedings of the 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event Type | I | II | III | IV | V |
|---|---|---|---|---|---|
| Training Set | 307 | 1122 | 1101 | 1237 | 748 |
| Validation Set | 77 | 280 | 275 | 310 | 187 |
| Total Number | 384 | 1402 | 1376 | 1547 | 935 |
| Model Name | Model Size (MB) | Training Speed (step/s) | Classification Accuracy (%) | Top 2 (%) |
|---|---|---|---|---|
| LeNet | 39.3 | 90.9 | 60 | 86.5 |
| AlexNet | 554.7 | 19.6 | 94.25 | 99.08 |
| VggNet | 1638.4 | 2.53 | 95.25 | 100 |
| GoogLeNet | 292.2 | 4.1 | 97.08 | 99.25 |
| ResNet | 282.4 | 7.35 | 91.9 | 97.75 |
| Type of Accuracy | I | II | III | IV | V |
|---|---|---|---|---|---|
| Accuracy (%) | 98.02 | 98.67 | 100 | 92.1 | 95.5 |
| Top 2 accuracy (%) | 100 | 100 | 100 | 99 | 100 |
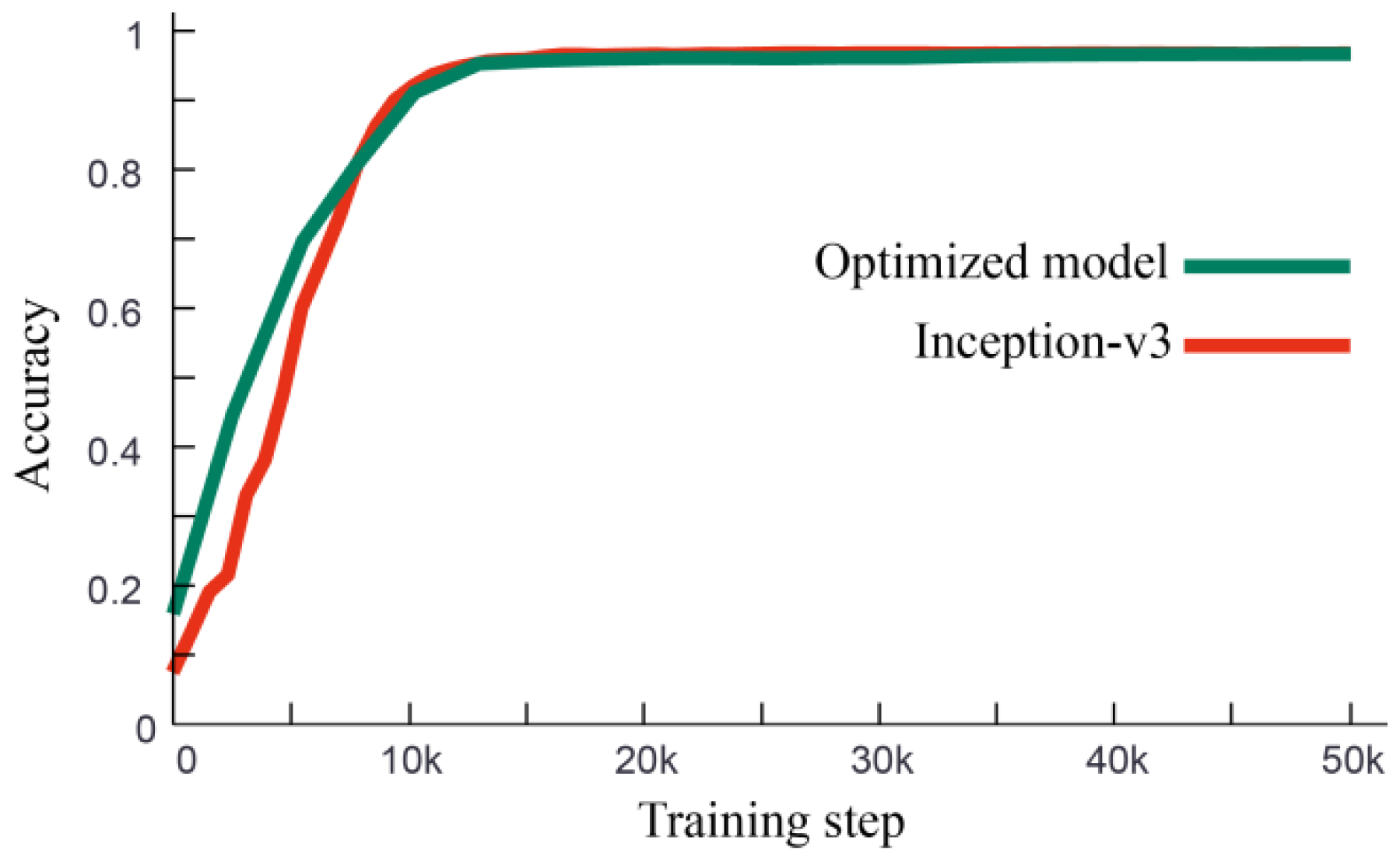
| Network | Accuracy (%) | Top 2 Accuracy (%) | Training Speed (steps/s) | Model Size (MB) |
|---|---|---|---|---|
| The optimized network | 96.67 | 99.75 | 35.61 | 20 |
| Inception-v3 | 97.08 | 99.25 | 4.35 | 292.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Wang, Y.; Zhao, L.; Fan, Z. An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning. Sensors 2019, 19, 3421. https://doi.org/10.3390/s19153421
Shi Y, Wang Y, Zhao L, Fan Z. An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning. Sensors. 2019; 19(15):3421. https://doi.org/10.3390/s19153421
Chicago/Turabian StyleShi, Yi, Yuanye Wang, Lei Zhao, and Zhun Fan. 2019. "An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning" Sensors 19, no. 15: 3421. https://doi.org/10.3390/s19153421
APA StyleShi, Y., Wang, Y., Zhao, L., & Fan, Z. (2019). An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning. Sensors, 19(15), 3421. https://doi.org/10.3390/s19153421