Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Subjects Information and Experimental Procedure
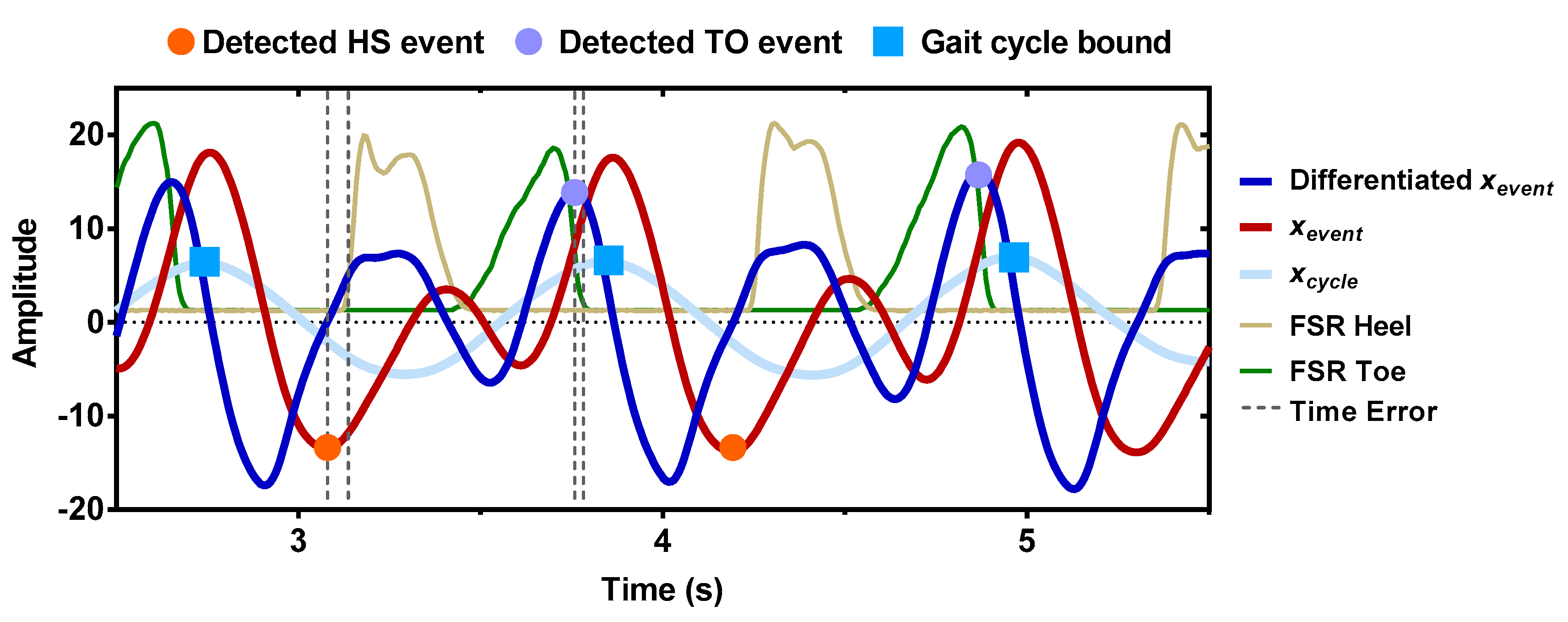
2.2. CWT Based Gait Event Detection Algorithm
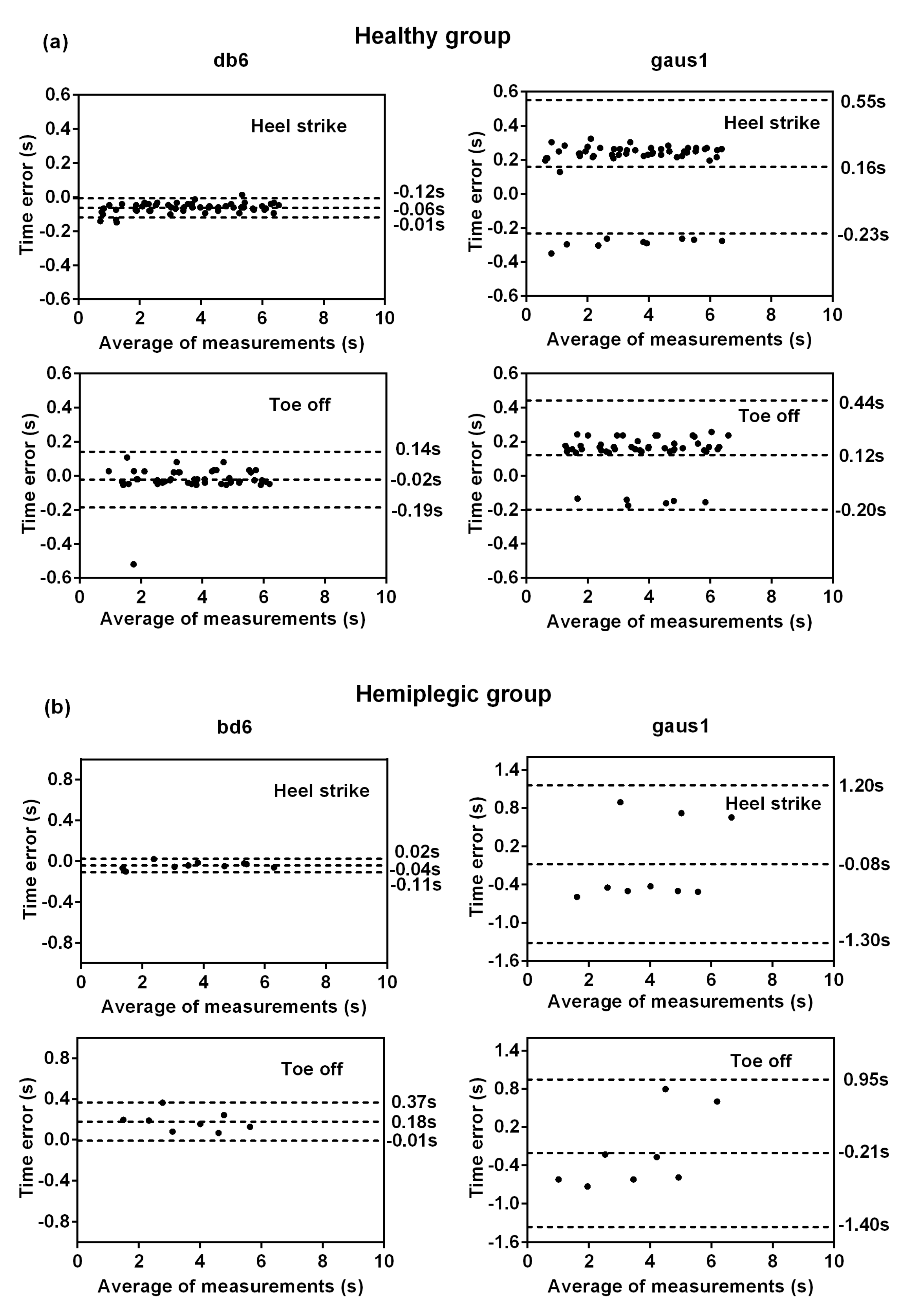
2.3. Verification of the CWT Based Gait Event Detection Algorithm
2.4. Appropriate Mother Wavelet Selection
2.5. Statistical Analysis
3. Results
3.1. Appropriate Mother Wavelet Selection Based on Accuracy Criteria
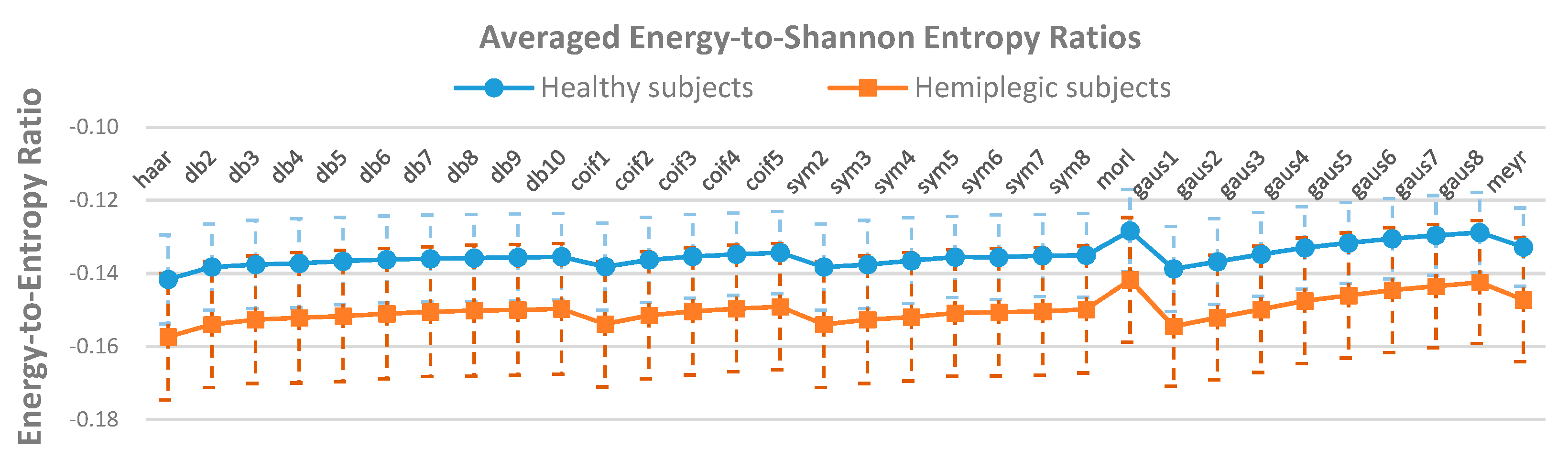
3.2. Appropriate Mother Wavelet Selection Based on Quantitative Criteria
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cui, C.; Bian, G.B.; Hou, Z.G.; Zhao, J.; Su, G.; Zhou, H.; Peng, L.; Wang, W. Simultaneous Recognition and Assessment of Post-Stroke Hemiparetic Gait by Fusing Kinematic, Kinetic, and Electrophysiological Data. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 24, 856–864. [Google Scholar] [CrossRef] [PubMed]
- Lyons, G.M.; Sinkjaer, T.; Burridge, J.H.; Wilcox, D.J. A review of portable FES-based neural orthoses for the correction of drop foot. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 10, 260–279. [Google Scholar] [CrossRef] [PubMed]
- Kotiadis, D.; Hermens, H.J.; Veltink, P.H. Inertial Gait Phase Detection for control of a drop foot stimulator Inertial sensing for gait phase detection. Med. Eng. Phys. 2010, 32, 287–297. [Google Scholar] [CrossRef] [PubMed]
- Rueterbories, J.; Spaich, E.G.; Andersen, O.K. Gait event detection for use in FES rehabilitation by radial and tangential foot accelerations. Med. Eng. Phys. 2014, 36, 502–508. [Google Scholar] [CrossRef] [PubMed]
- Skelly, M.M.; Chizeck, H.J. Real-time gait event detection for paraplegic FES walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 9, 59–68. [Google Scholar] [CrossRef] [PubMed]
- Damasevicius, R.; Vasiljevas, M.; Salkevicius, J.; Wozniak, M. Human Activity Recognition in AAL Environments Using Random Projections. Comput. Math. Methods Med. 2016, 4073584. [Google Scholar] [CrossRef]
- Mannini, A.; Sabatini, A.M. Machine Learning Methods for Classifying Human Physical Activity from on-Body Accelerometers. Sensors 2010, 10, 1154–1175. [Google Scholar] [CrossRef]
- Lopezmeyer, P.; Fulk, G.D.; Sazonov, E.S. Automatic Detection of Temporal Gait Parameters in Poststroke Individuals. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Sant’Anna, A.; Wickström, N. A symbol-based approach to gait analysis from acceleration signals: Identification and detection of gait events and a new measure of gait symmetry. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1180–1187. [Google Scholar] [CrossRef]
- Bejarano, N.C.; Ambrosini, E.; Pedrocchi, A.; Ferrigno, G.; Monticone, M.; Ferrante, S. A Novel Adaptive, Real-Time Algorithm to Detect Gait Events from Wearable Sensors. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 413–422. [Google Scholar] [CrossRef]
- Encarna, M.A.M.; Idsart, K.; Erik, A.; Stefan, W.; Martijn, N.; Van, L.R.C.; Van, D.J.H. A novel accelerometry-based algorithm for the detection of step durations over short episodes of gait in healthy elderly. J. Neuroeng. Rehabil. 2016, 13, 38. [Google Scholar] [CrossRef]
- Williamson, R.; Andrews, B.J. Gait event detection for FES using accelerometers and supervised machine learning. IEEE Trans. Rehabil. Eng. 2000, 8, 312–319. [Google Scholar] [CrossRef]
- Khandelwal, S.; Wickstrom, N. Gait Event Detection in Real-World Environment for Long-Term Applications: Incorporating Domain Knowledge into Time-Frequency Analysis. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1363–1372. [Google Scholar] [CrossRef]
- Lai, D.T.; Begg, R.K.; Palaniswami, M. Computational intelligence in gait research: A perspective on current applications and future challenges. IEEE Trans. Inf. Technol. Biomed. 2009, 13, 687–702. [Google Scholar] [CrossRef]
- Singh, B.N.; Tiwari, A.K. Optimal selection of wavelet basis function applied to ECG signal denoising. Digit. Signal Process. 2006, 16, 275–287. [Google Scholar] [CrossRef]
- Shadevsky, A.; Petrovsky, A. Bio-inspired voice activity detector based on the human speech properties in the modulation domain. In Information Processing and Security Systems; Saeed, K., Pejas, J., Eds.; Springer Science Business Media, Inc.: New York, NY, USA, 2005; pp. 43–54. [Google Scholar]
- Al-Qazzaz, N.K.; Ali, S.H.B.M.; Ahmad, S.A.; Islam, M.S.; Escudero, J. Selection of Mother Wavelet Functions for Multi-Channel EEG Signal Analysis during a Working Memory Task. Sensors 2015, 15, 29015–29035. [Google Scholar] [CrossRef]
- Salyers, J.B.; Dong, Y.; Gai, Y. Continuous Wavelet Transform for Decoding Finger Movements from Single-Channel EEG. IEEE Trans. Biomed. Eng. 2018. [Google Scholar] [CrossRef]
- Beritelli, F.; Capizzi, G.; Sciuto, G.L.; Napoli, C.; Wozniak, M. A novel training method to preserve generalization of RBPNN classifiers applied to ECG signals diagnosis. Neural Netw. 2018, 108, 331–338. [Google Scholar] [CrossRef]
- Mccamley, J.; Donati, M.; Grimpampi, E.; Mazzà, C. An enhanced estimate of initial contact and final contact instants of time using lower trunk inertial sensor data. Gait Posture 2012, 36, 316–318. [Google Scholar] [CrossRef]
- Khandelwal, S.; Wickström, N. Novel methodology for estimating Initial Contact events from accelerometers positioned at different body locations. Gait Posture 2018, 59, 278–285. [Google Scholar] [CrossRef]
- Pham, M.H.; Elshehabi, M.; Haertner, L.; Del, D.S.; Srulijes, K.; Heger, T.; Synofzik, M.; Hobert, M.A.; Faber, G.S.; Hansen, C. Validation of a Step Detection Algorithm during Straight Walking and Turning in Patients with Parkinson’s Disease and Older Adults Using an Inertial Measurement Unit at the Lower Back. Front. Neurol. 2017, 8, 457. [Google Scholar] [CrossRef]
- Glowinski, S.; Blazejewski, A.; Krzyzynski, T. Human Gait Feature Detection Using Inertial Sensors Wavelets. Wearable Robot. Chall. Trends 2017, 16, 397–401. [Google Scholar] [CrossRef]
- Aung, M.S.; Thies, S.B.; Kenney, L.P.; Howard, D.; Selles, R.W.; Findlow, A.H.; Goulermas, J.Y. Automated detection of instantaneous gait events using time frequency analysis and manifold embedding. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 908–916. [Google Scholar] [CrossRef]
- Forsman, P.M.; Toppila, E.M.; Haeggstrom, E.O. Wavelet analysis to detect gait events. In Proceedings of the 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society: Engineering the Future of Biomedicine (EMBC), Minneapolis, MN, USA, 2–6 September 2009; pp. 424–427. [Google Scholar]
- Zhou, H.; Ji, N.; Samuel, O.W.; Cao, Y.; Zhao, Z.; Chen, S.; Li, G. Towards Real-Time Detection of Gait Events on Different Terrains Using Time-Frequency Analysis and Peak Heuristics Algorithm. Sensors 2016, 16, 1634. [Google Scholar] [CrossRef]
- Saba, R.; Lockhart, T.E. Towards Real-Time Detection of Freezing of Gait Using Wavelet Transform on Wireless Accelerometer Data. Sensors 2016, 16, 475. [Google Scholar] [CrossRef]
- Khandelwal, S.; Wickström, N. Evaluation of the performance of accelerometer-based gait event detection algorithms in different real-world scenarios using the MAREA gait database. Gait Posture 2016, 51, 84–90. [Google Scholar] [CrossRef]
- Chau, T. A review of analytical techniques for gait data. Part 2: Neural network and wavelet methods. Gait Posture 2001, 13, 102–120. [Google Scholar] [CrossRef]
- Ngui, W.K.; Leong, M.S.; Hee, L.M.; Abdelrhman, A.M. Wavelet Analysis: Mother Wavelet Selection Methods. Appl. Mech. Mater. 2013, 393, 953–958. [Google Scholar] [CrossRef]
- Rafiee, J.; Rafiee, M.A.; Prause, N.; Schoen, M.P. Wavelet basis functions in biomedical signal processing. Expert Syst. Appl. 2011, 38, 6190–6201. [Google Scholar] [CrossRef]
- Mojsilović, A.; Popović, M.V.; Rackov, D.M. On the selection of an optimal wavelet basis for texture characterization. IEEE Trans. Image Process. 2000, 9, 2043–2050. [Google Scholar] [Green Version]
- Soubra, R.; Diab, M.O.; Moslem, B. A mother wavelet selection study for vertical ground reaction force signals. In Proceedings of the 2nd International Conference on Bio-Engineering for Smart Technologies, Paris, France, 30 August–1 September 2017; pp. 1–5. [Google Scholar]
- Cho, K.H.; Lee, J.Y.; Lee, K.J.; Kang, E.K. Factors Related to Gait Function in Post-stroke Patients. J. Phys. Ther. Sci. 2014, 26, 1941–1944. [Google Scholar] [CrossRef] [Green Version]
- Orellana, J.N.; Sixto, A.S.; Torres, B.; Cachadina, E.S.; Martin, P.F.; Rosa, F.J. Multiscale time irreversibility: Is it useful in the analysis of human gait? Biomed. Signal Process. Control 2018, 39, 431–434. [Google Scholar] [CrossRef]
- González, R.C.; López, A.M.; Rodriguez-Uría, J.; Alvarez, D.; Alvarez, J.C. Real-time gait event detection for normal subjects from lower trunk accelerations. Gait Posture 2010, 31, 322–325. [Google Scholar] [CrossRef]
- Catalfamo, P.; Moser, D.; Ghoussayni, S.; Ewins, D. Detection of gait events using an F-Scan in-shoe pressure measurement system. Gait Posture 2008, 28, 420–426. [Google Scholar] [CrossRef]
- Sprager, S.; Juric, M.B. Robust Stride Segmentation of Inertial Signals Based on Local Cyclicity Estimation. Sensors 2018, 18, 1091. [Google Scholar] [CrossRef]
- Yan, R. Base Wavelet Selection Criteria for Non-Stationary Vibration Analysis in Bearing Health Diagnosis. Ph.D. Thesis, University of Massachusetts Amherst, Amherst, MA, USA, May 2007. [Google Scholar]
- Sota, K.; Uchiyama, Y.; Ochi, M.; Matsumoto, S.; Hachisuka, K.; Domen, K. Examination of factors related to the effect of improving gait speed with functional electrical stimulation intervention for patients with stroke. PM&R 2018, 10, 798–805. [Google Scholar] [CrossRef]
- Chen, G.; Patten, C.; Kothari, D.H.; Zajac, F.E. Gait differences between individuals with post-stroke hemiparesis and non-disabled controls at matched speeds. Gait Posture 2005, 22, 51–56. [Google Scholar] [CrossRef]
- Lilly, J.M.; Olhede, S.C. Higher-Order Properties of Analytic Wavelets. IEEE Trans. Signal Process. 2009, 57, 146–160. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Subject | Sensor Position | Sensor Type | Wavelet | Detected Gait Parameters |
|---|---|---|---|---|---|
| [13] | Healthy subjects | Left and right ankles | Tri-axial accelerometer | Morlet (morl) | HS and TO events |
| [20] | Healthy subjects | Waist | Tri-axial accelerometer | Gaussian (gaus1) | HS and TO events |
| [21] | Healthy subjects | Ankle, thigh, waist, chest, upper arm and wrist | Tri-axial accelerometer | Morlet (morl) | HS and TO events |
| [22] | Parkinson’s disease (PD) patients | Lower back | Tri-axial accelerometer | Gaussian (gaus1) | HS and TO events |
| [24] | Healthy subjects | Foot, ankle, shank and waist | Tri-axial accelerometer | Daubechies (db2) | HS and TO events |
| [26] | Healthy subjects | Tibialis anterior muscle of the lower leg | Tri-axial accelerometer | Morlet (morl) | HS and TO events |
| [27] | Parkinson’s disease (PD) patients | Shank, thigh and lower back | Tri-axial accelerometer | Daubechies (db4) | Freezing of gait |
| No. | Age | Height (cm) | Weight (kg) | State of Illness | Brunnstrom Stage (Lower Limb) | Diagnosis | Symptom |
|---|---|---|---|---|---|---|---|
| 1 | 59 | 163 | 78 | 12 months | V | Cerebral Ischemic Stroke | Left limb hemiplegia |
| 2 | 44 | 171 | 54 | 6 months | IV | Cerebral Ischemic Stroke | Right limb hemiplegia |
| 3 | 53 | 167 | 61 | 7 months | IV | Cerebral Ischemic Stroke | Right limb hemiplegia |
| Wavelet Family | Order N | Orthogonality | Symmetry | Explicit Expression |
|---|---|---|---|---|
| Haar | db 1 | Orthogonal | Symmetric | |
| Daubechies | db 2–10 | Orthogonal | Asymmetric | No |
| Coiflets | coif 1–5 | Orthogonal | Near symmetric | No |
| Symlets | sym 2–8 | Orthogonal | Near symmetric | No |
| Gaussian | gaus 1–8 | No | Symmetric | |
| Morlet | morl | No | Symmetric | |
| Meyer | meyr | No | Symmetric |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, N.; Zhou, H.; Guo, K.; Samuel, O.W.; Huang, Z.; Xu, L.; Li, G. Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals. Sensors 2019, 19, 3462. https://doi.org/10.3390/s19163462
Ji N, Zhou H, Guo K, Samuel OW, Huang Z, Xu L, Li G. Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals. Sensors. 2019; 19(16):3462. https://doi.org/10.3390/s19163462
Chicago/Turabian StyleJi, Ning, Hui Zhou, Kaifeng Guo, Oluwarotimi Williams Samuel, Zhen Huang, Lisheng Xu, and Guanglin Li. 2019. "Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals" Sensors 19, no. 16: 3462. https://doi.org/10.3390/s19163462
APA StyleJi, N., Zhou, H., Guo, K., Samuel, O. W., Huang, Z., Xu, L., & Li, G. (2019). Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals. Sensors, 19(16), 3462. https://doi.org/10.3390/s19163462