Sensor Networks for Aerospace Human-Machine Systems †


 ,
, 
 , and
, and
Abstract
:1. Introduction
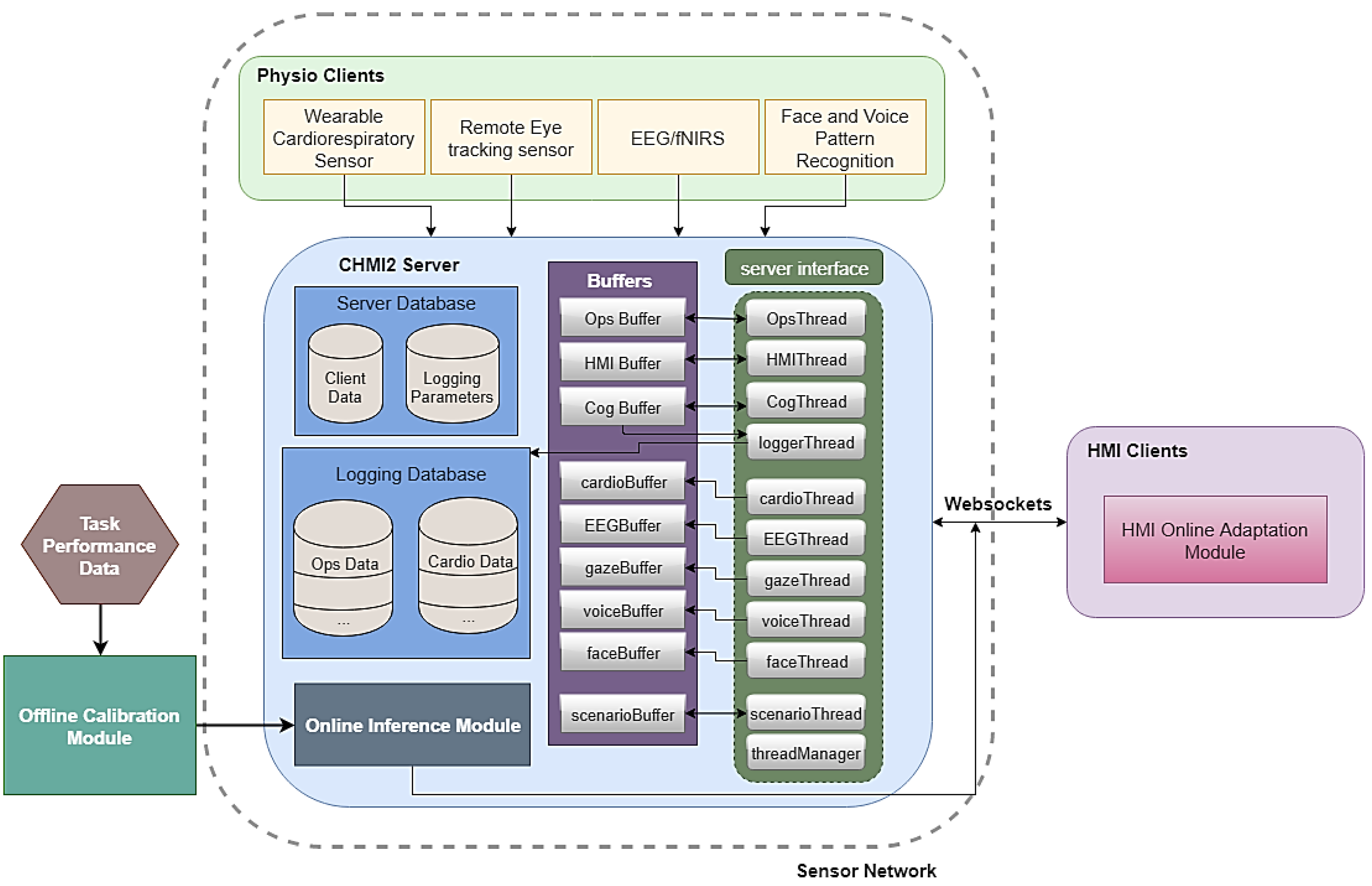
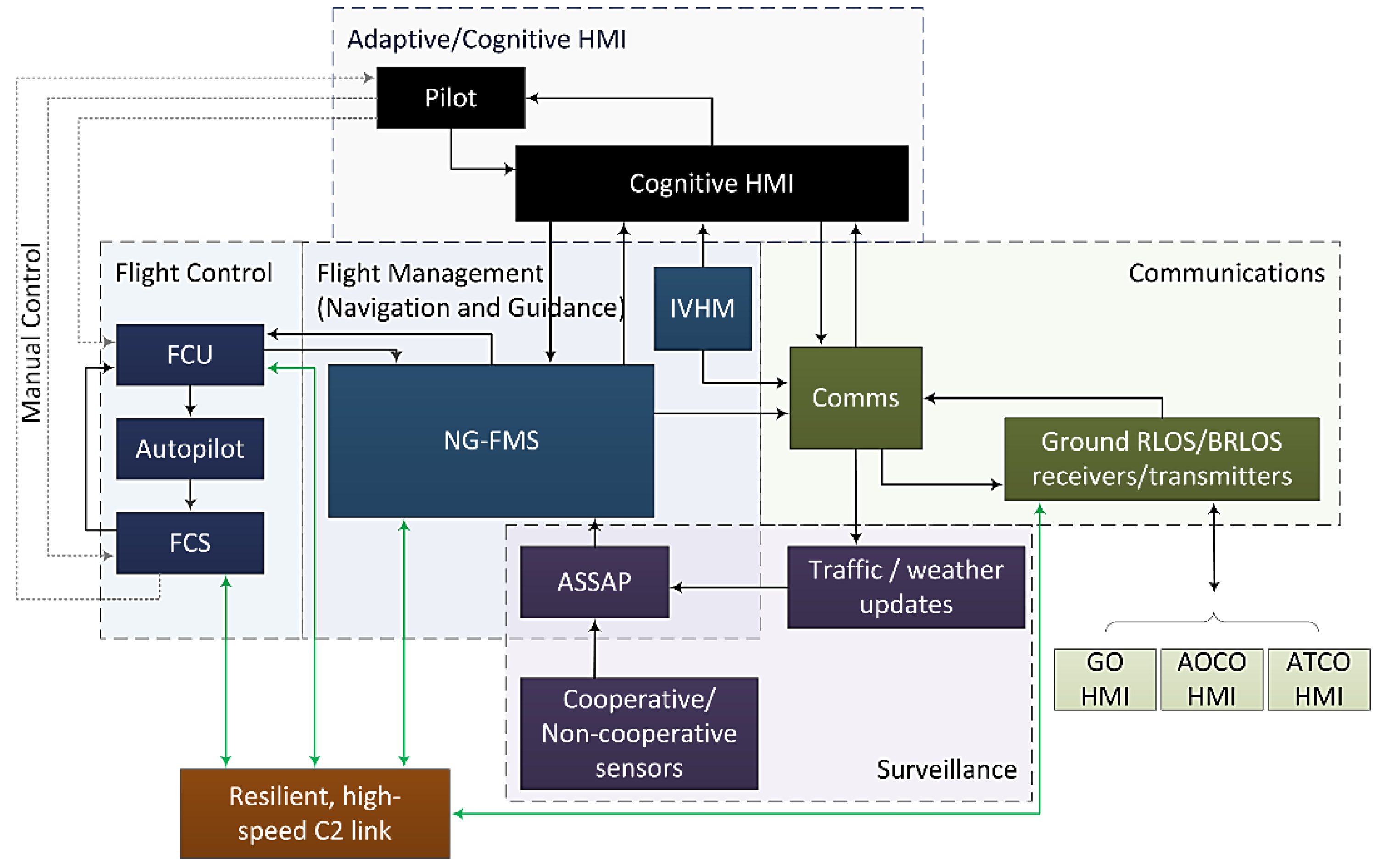
2. Sensor Networks in CHMI2 Framework
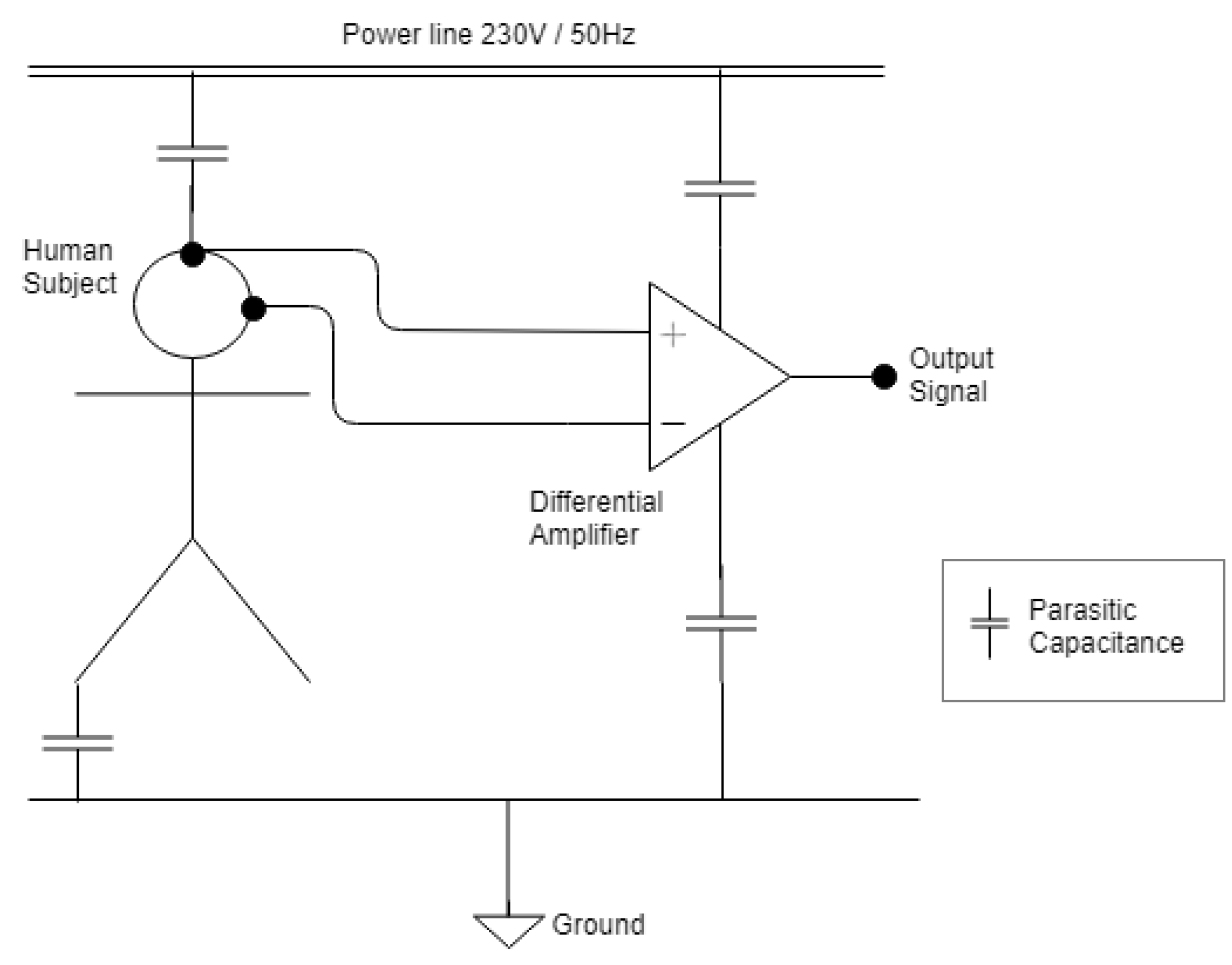
3. Neurophysiological Sensors
3.1. Eye Tracking Sensors
3.2. Cardiorespiratory Sensors
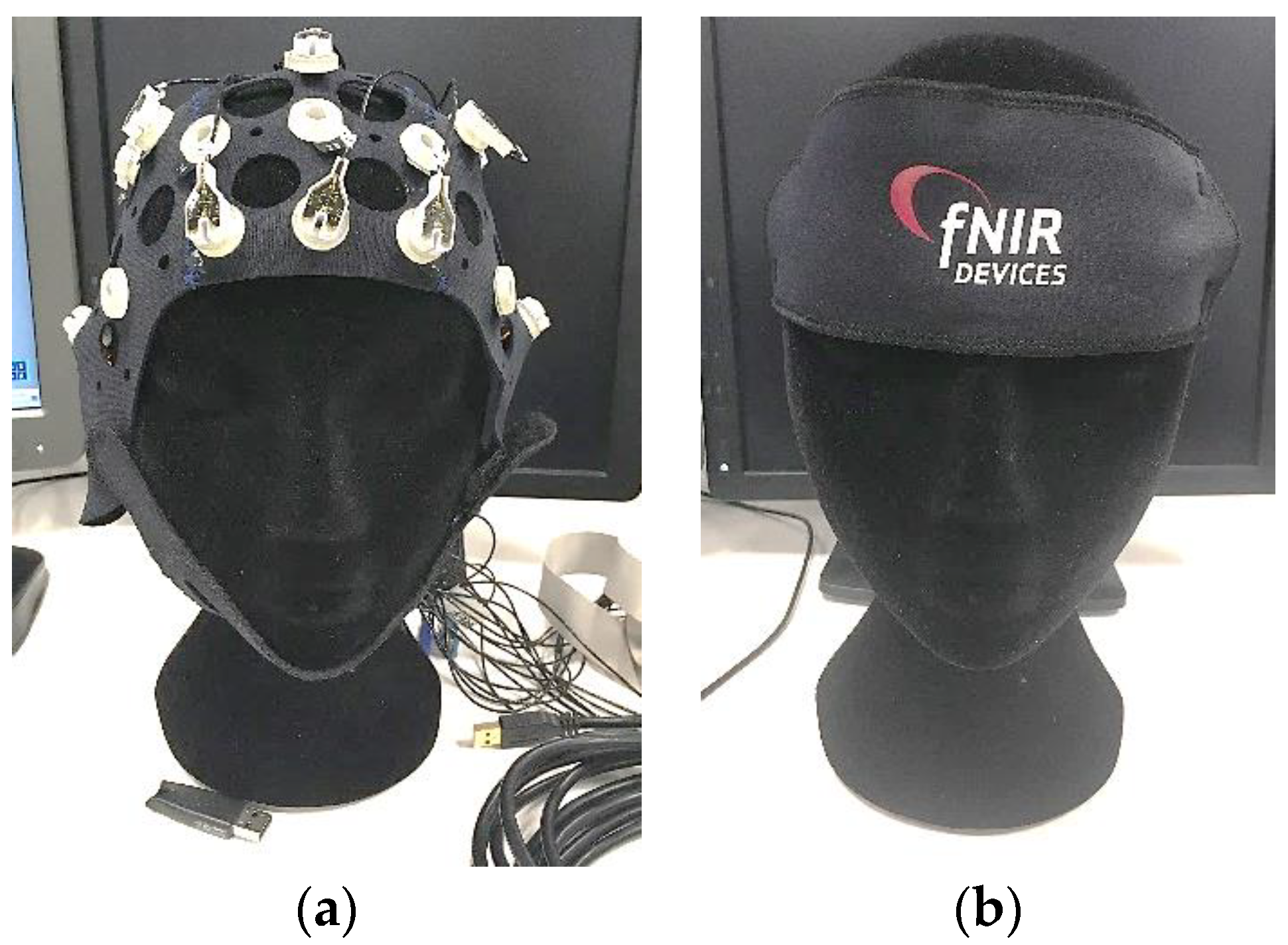
3.3. Neuroimaging Sensors
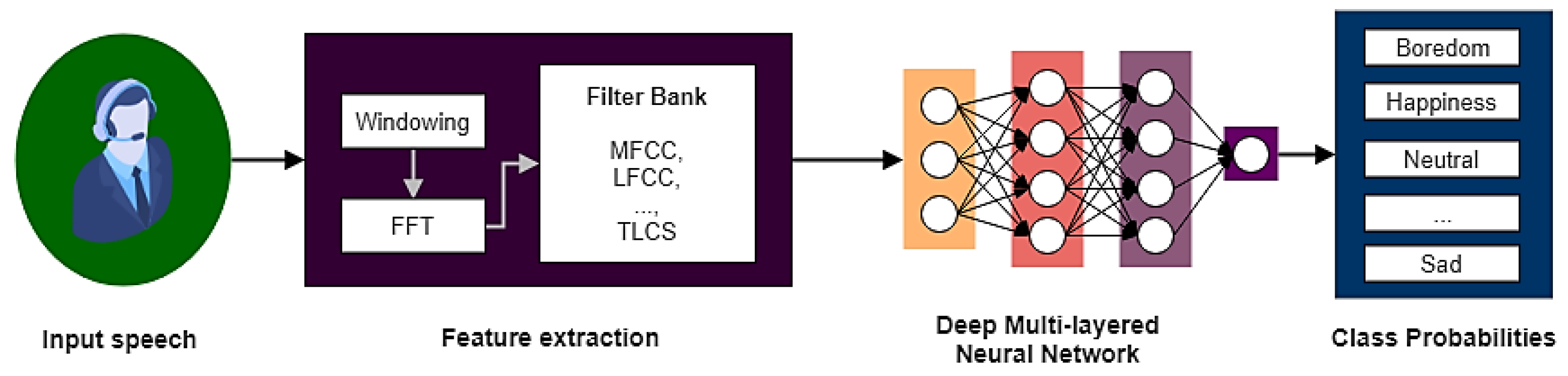
3.4. Voice Patterns
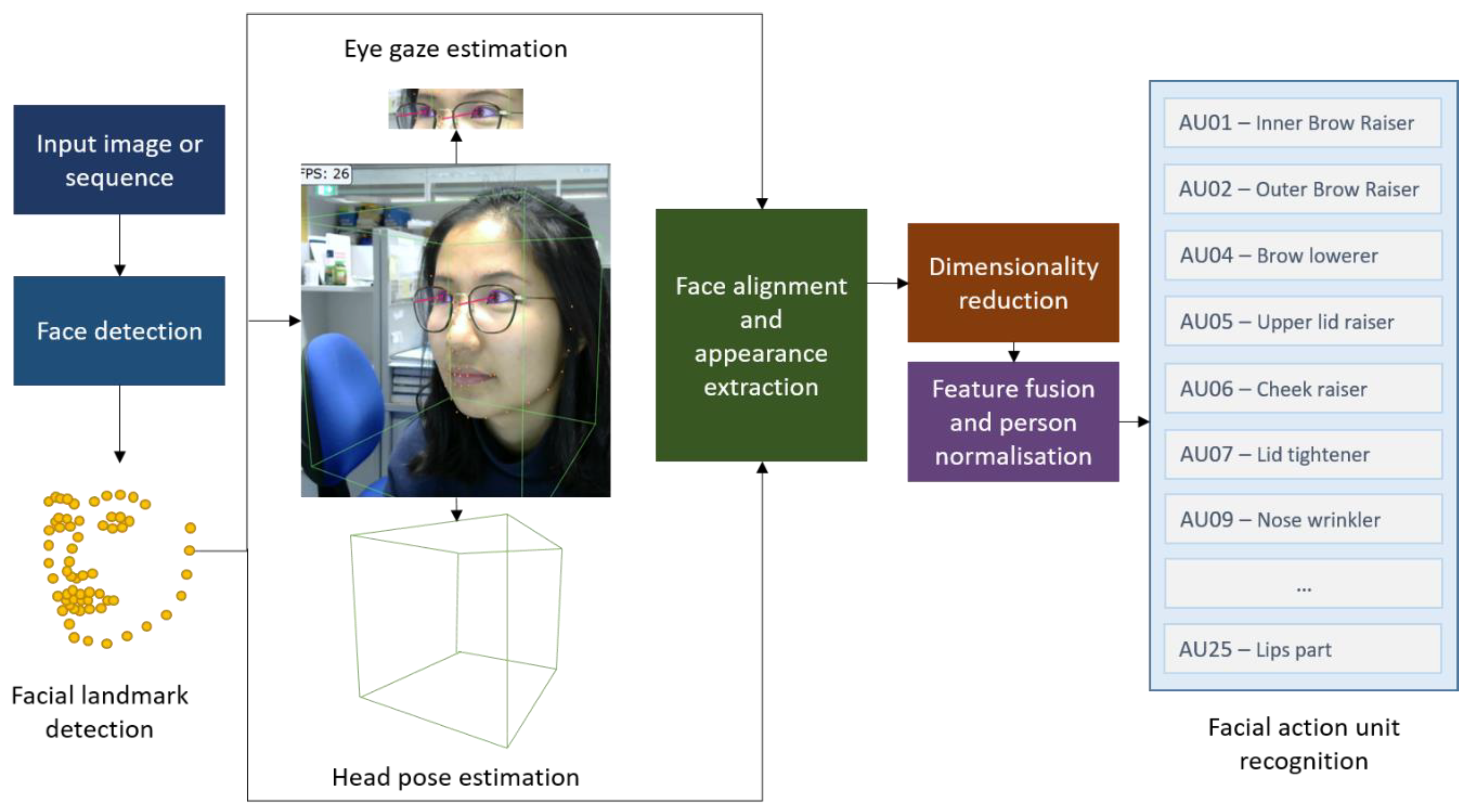
3.5. Face Expressions
4. Machine Learning in Estimation Modules
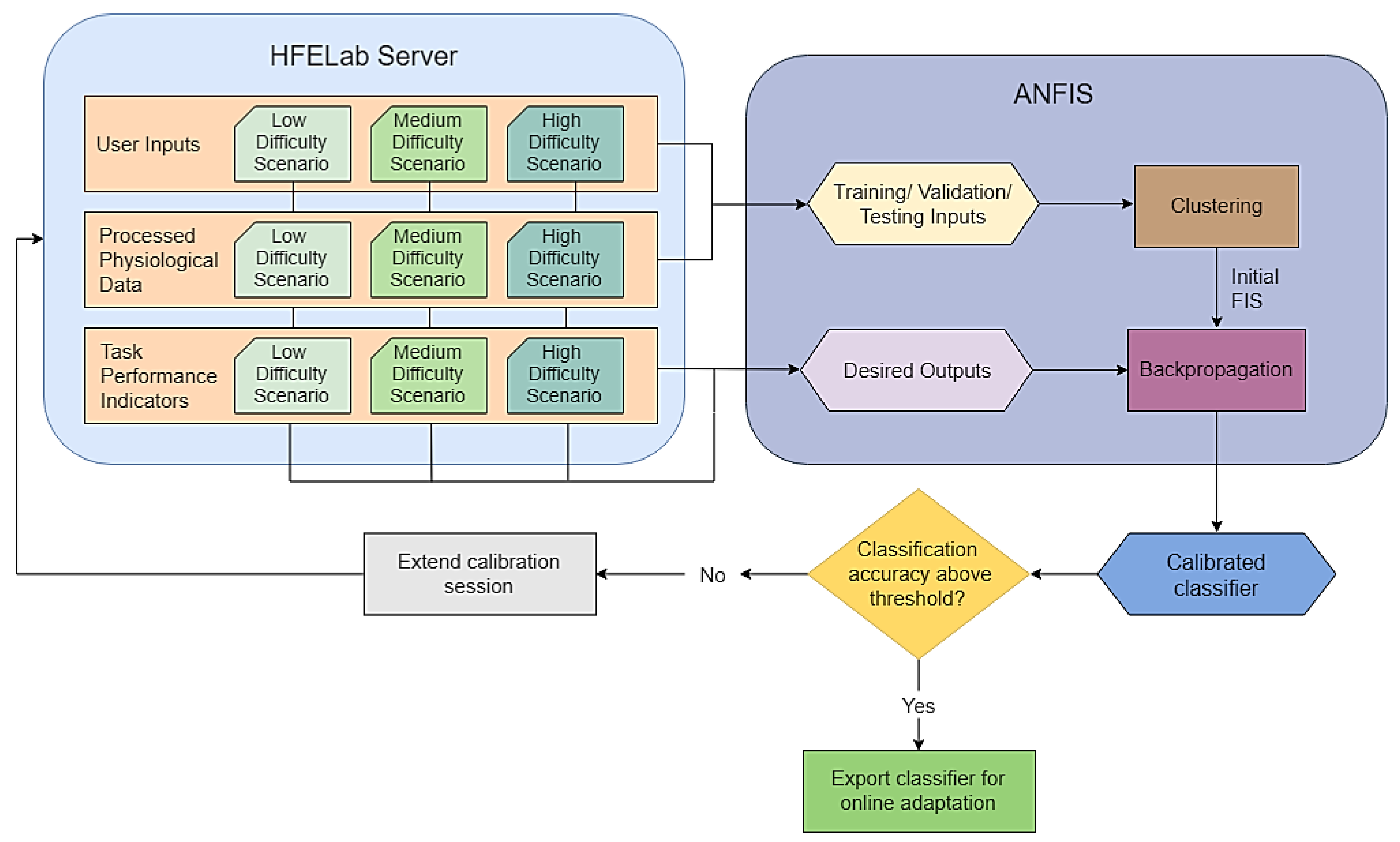
4.1. Neuro-Fuzzy Inference Concept
- MWL has a probability of 0.15 to be high and 0.85 to be medium.
- MWL is high to a degree of 0.15 and medium to a degree of 0.85.
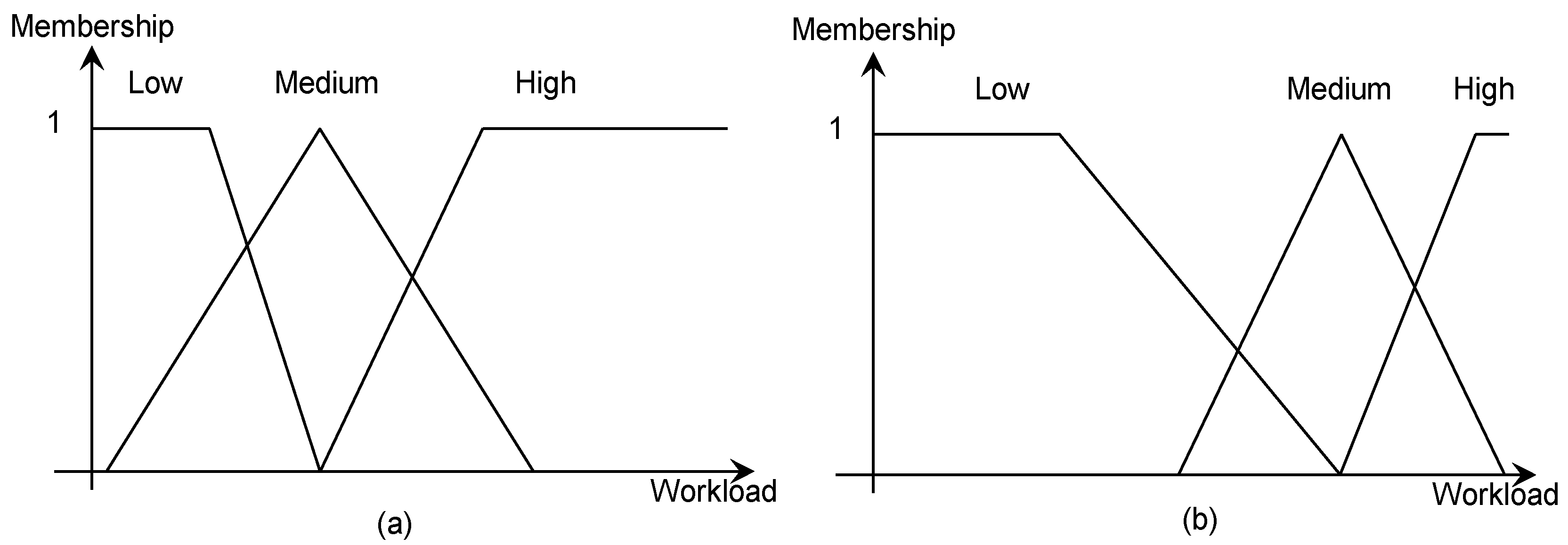
4.2. Fuzzy Sets
- R1: IF [(HR is Low) AND (BLR is High) AND (DT is High)] THEN [(MFA is High)]
- R2: IF [(HR is High) AND (BLR is Low) AND (DT is High)] THEN [(MWL is High)]
4.3. Neuro-Fuzzy Networks
- Input layer: each node passes the input values to the next layer.
- Antecedent layer: each node fuzzifies the inputs using a membership function. The node output is the fuzzy set membership for a given input parameter.
- Rule layer: each node combines the fuzzified inputs using a fuzzy AND operator. The node output is the rule firing strength. For example, K Sugeno-type rules, where the rules can be formulated as [9]:where Ain is the nth membership function of input xi, fj is the output node function associated with output j and pki denotes the coefficients of this node function for rule k and input i.Rule k: If x1 is A1n and x2 is A2n and … and xi is Ain then fj = pk0 + pk1×1 + pk2x2 + … + pkixi
- Consequent layer: each node combines the fired rules using a fuzzy OR operator. The node output is the membership value of the output parameter.
- Output layer: each node acts as a defuzzifier for the consequent nodes to obtain a crisp output.
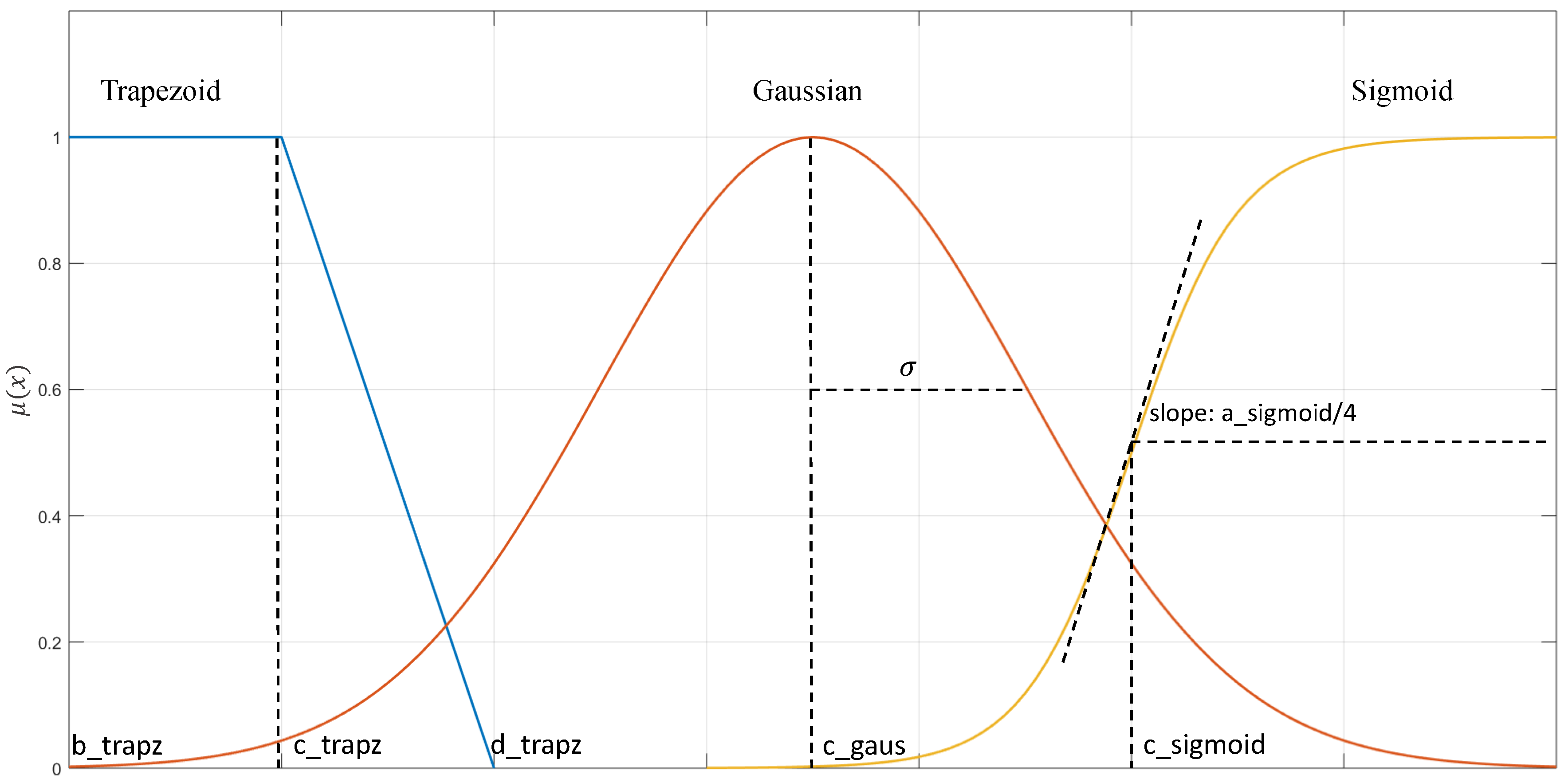
4.4. Membership Functions
5. Sensor Performance Characterisation
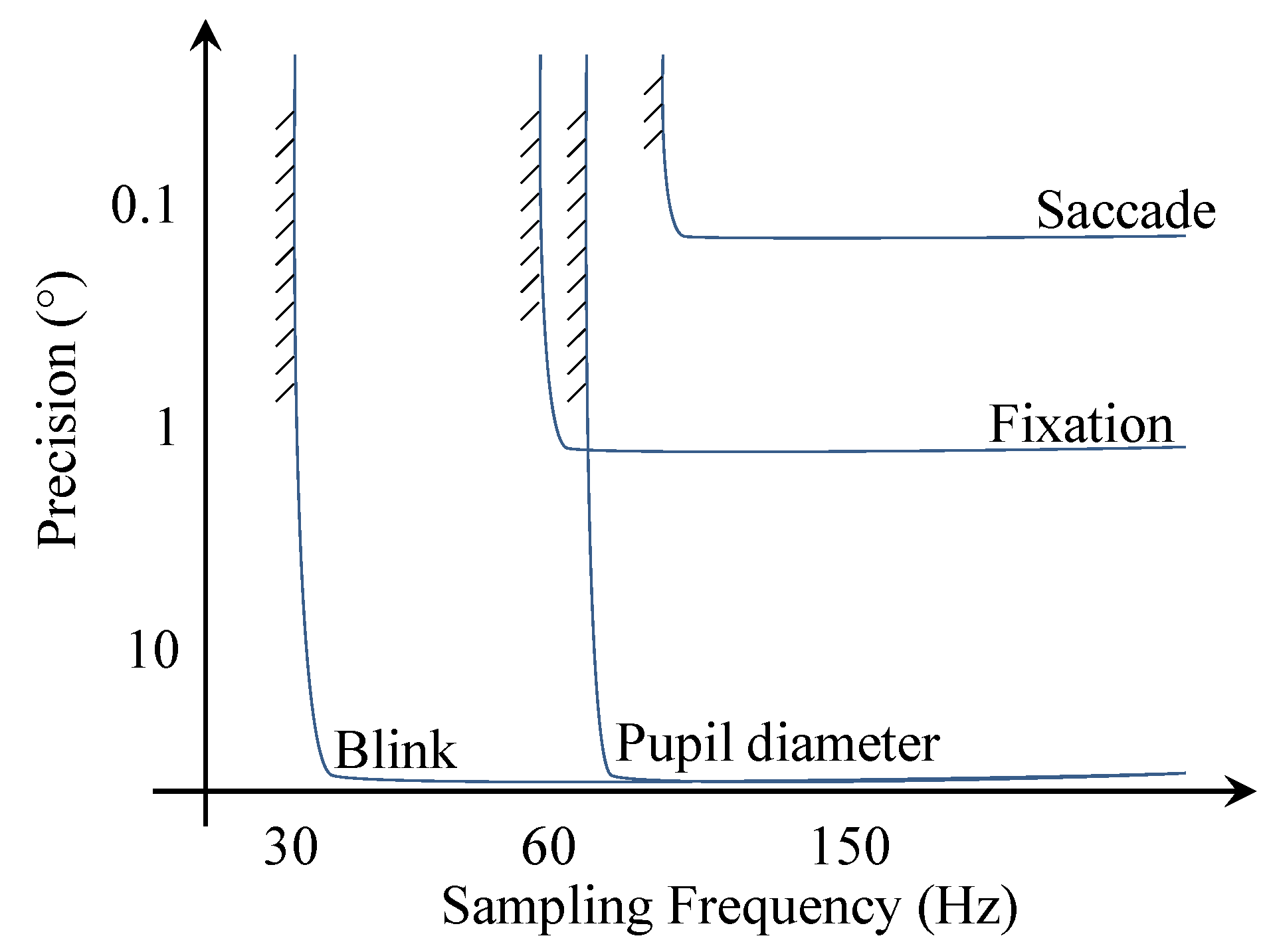
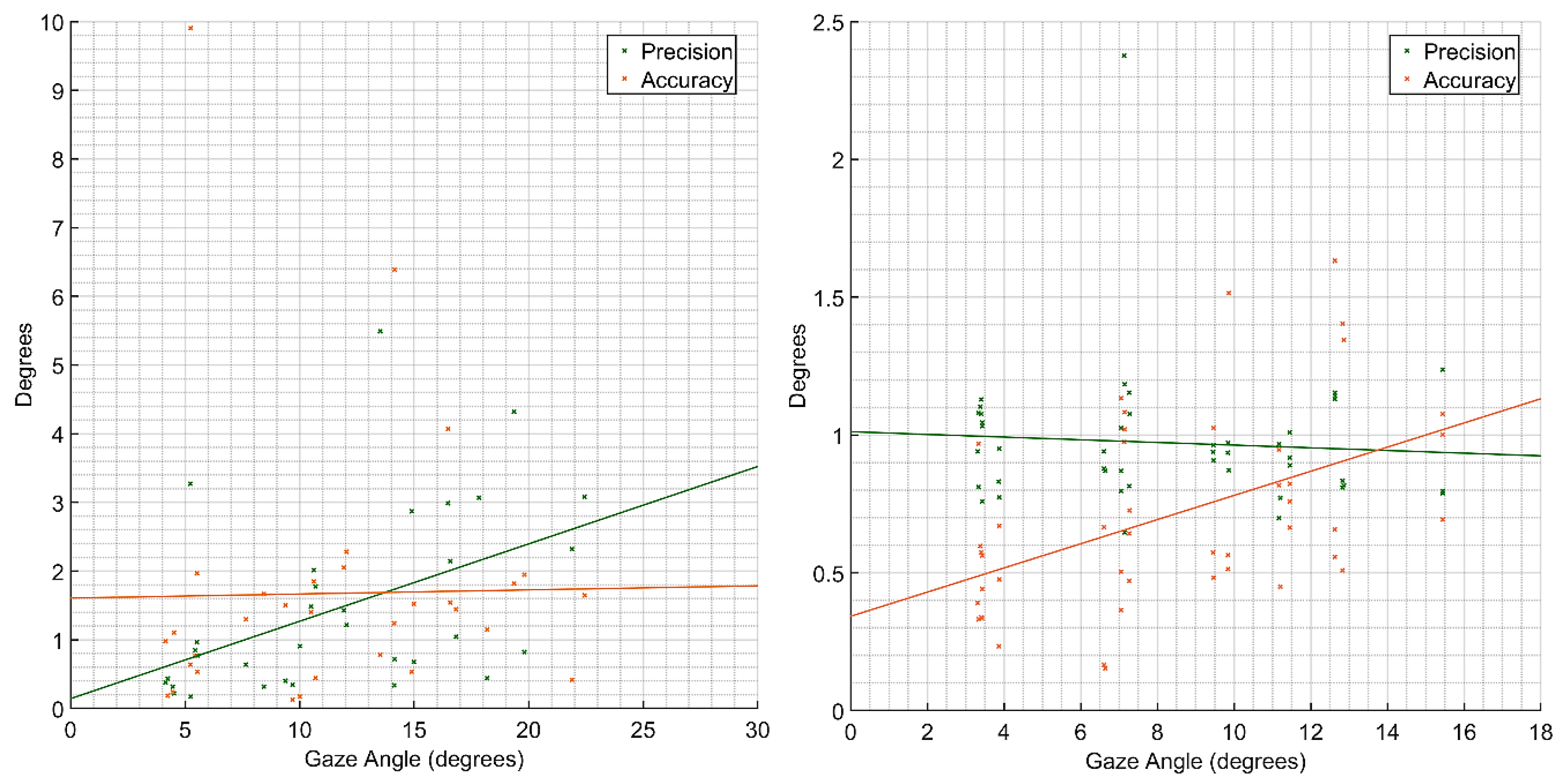
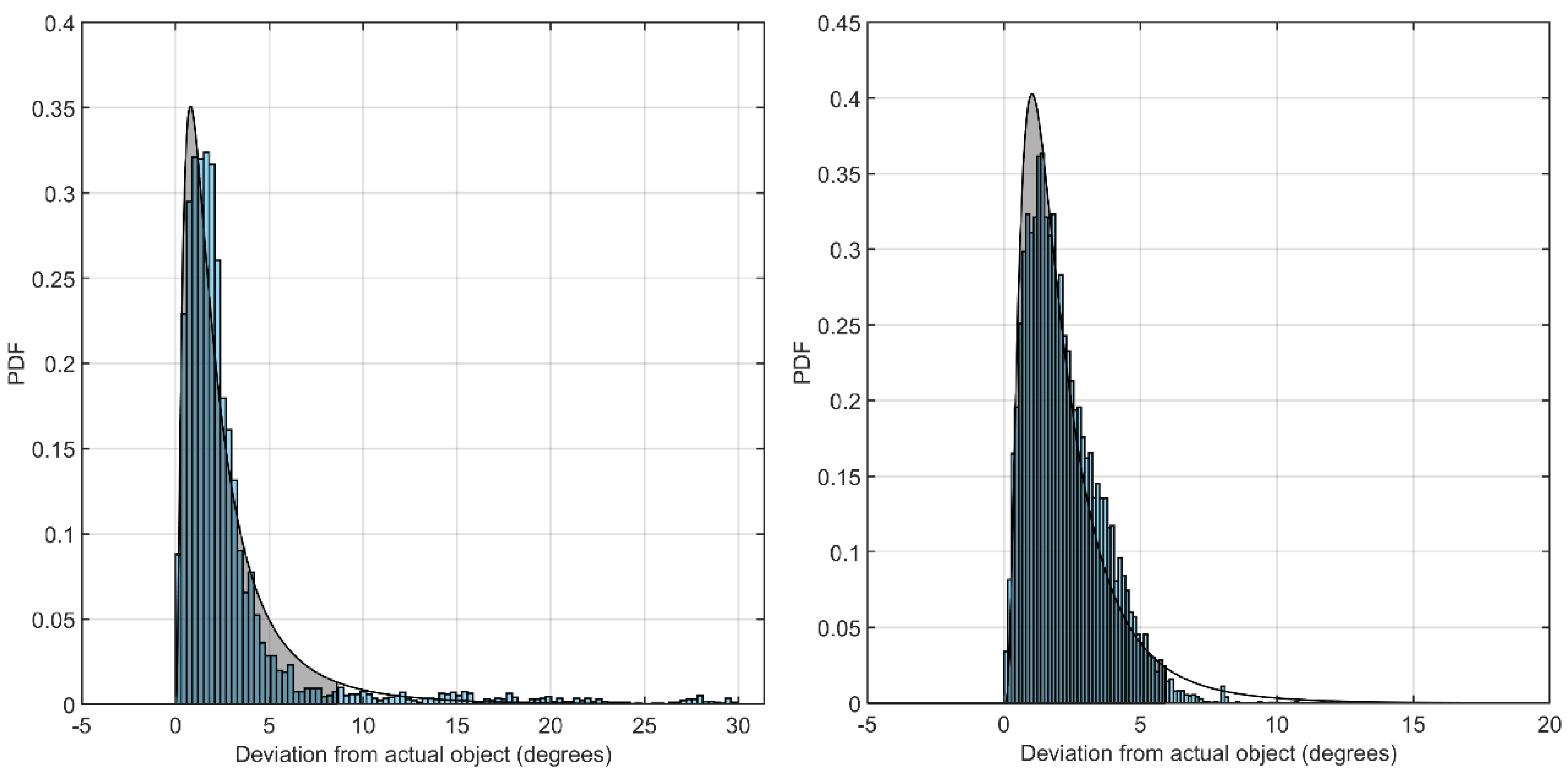
5.1. Eye-Tracking Sensors
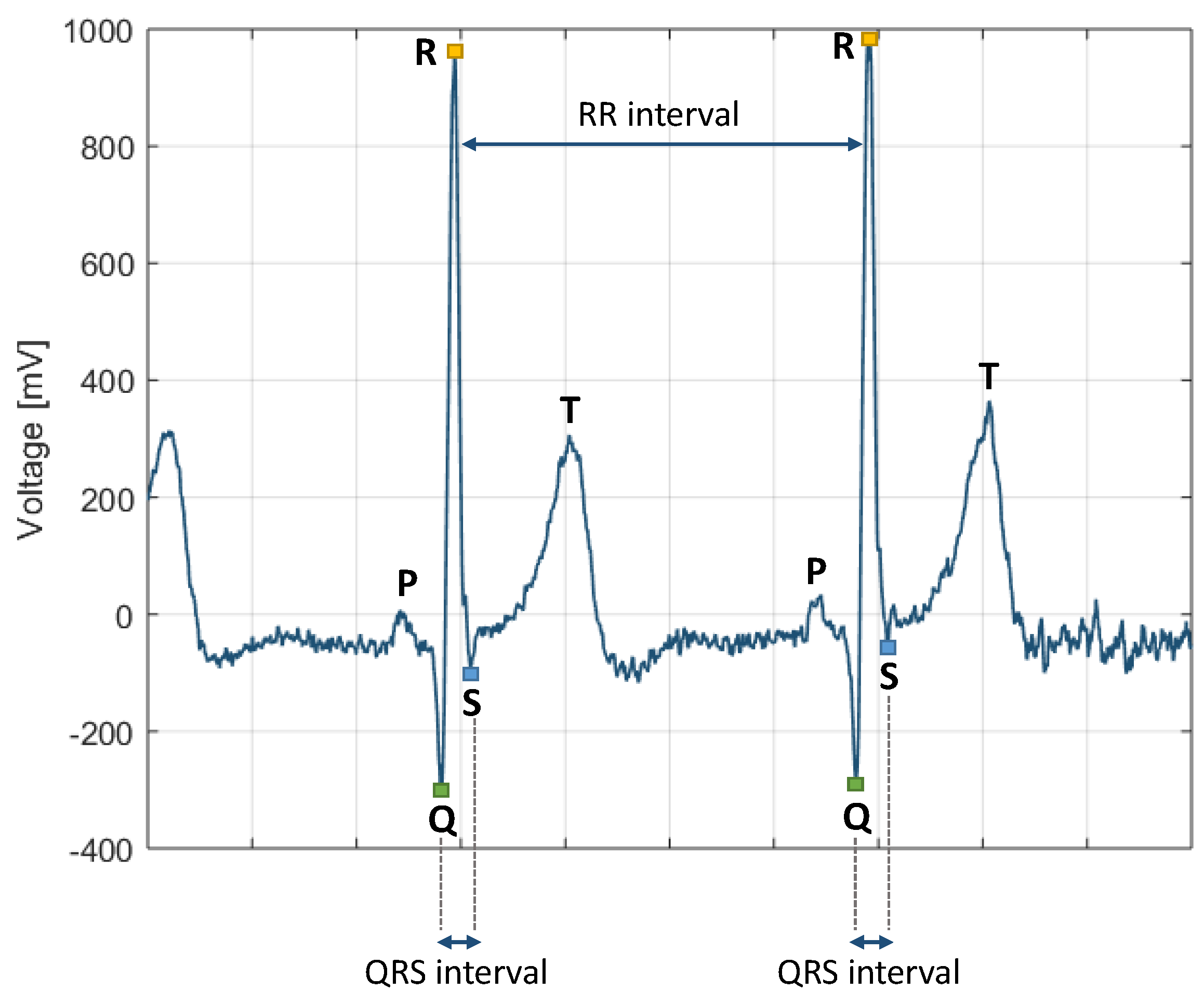
5.2. Cardiac Sensors
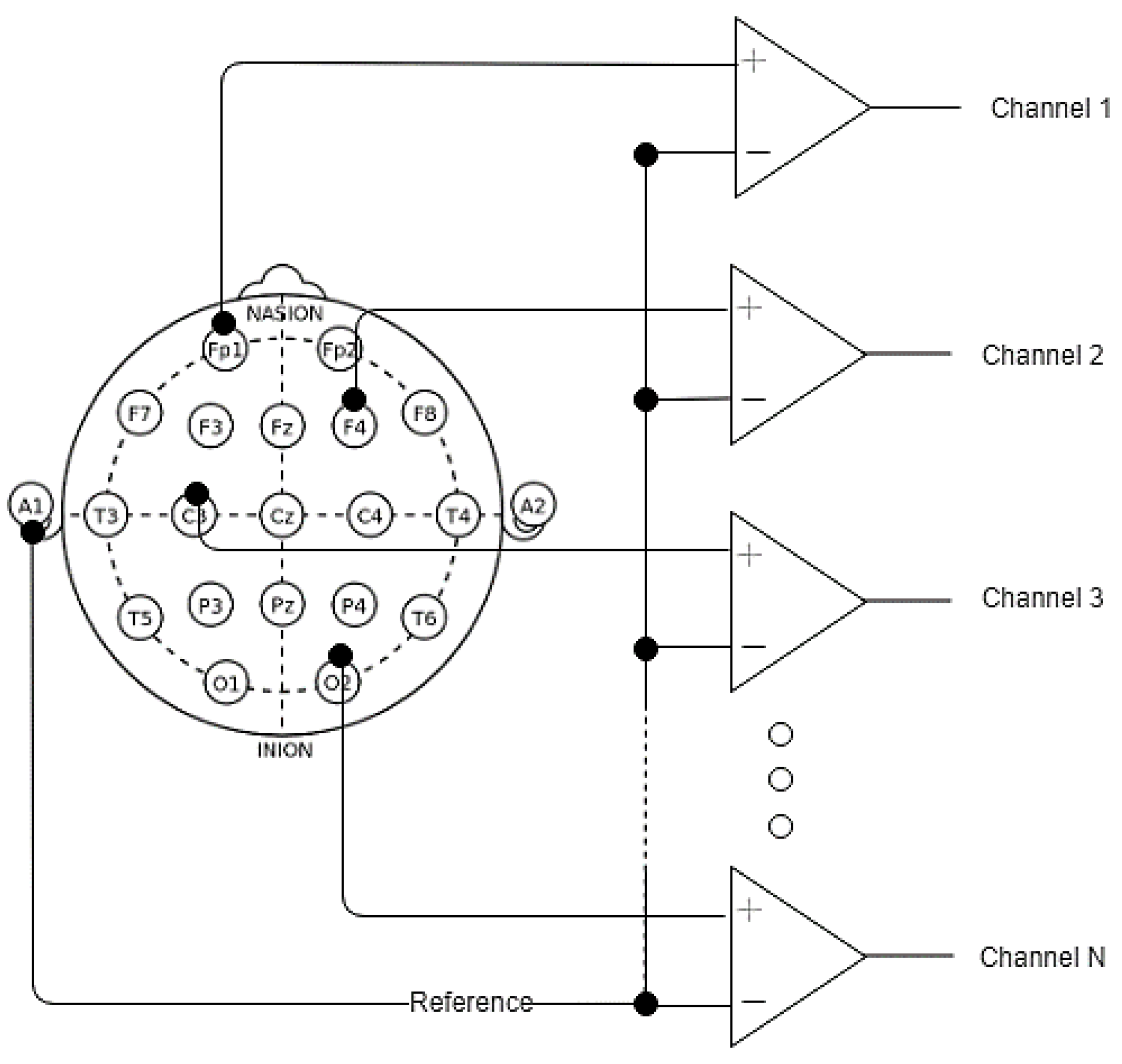
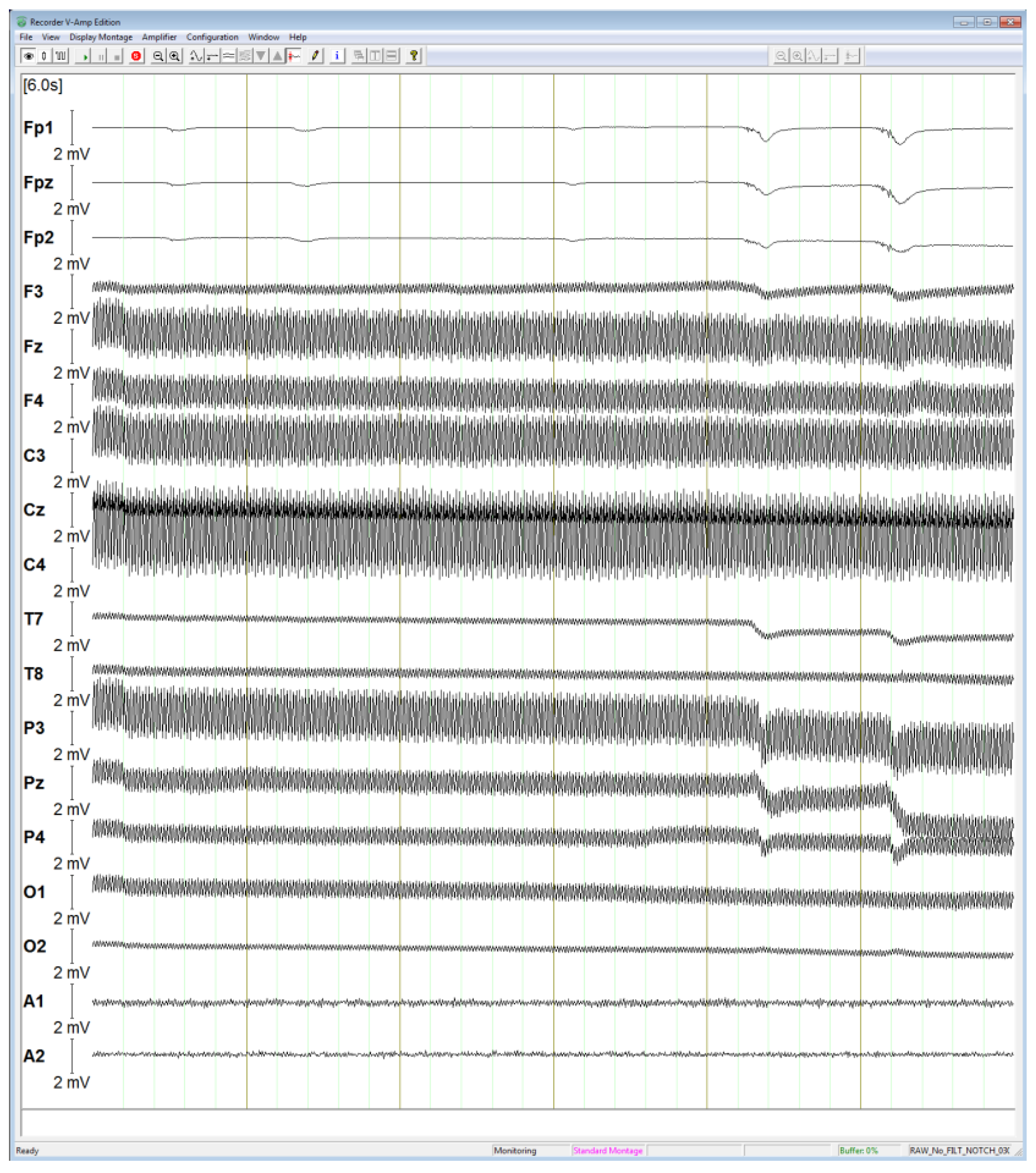
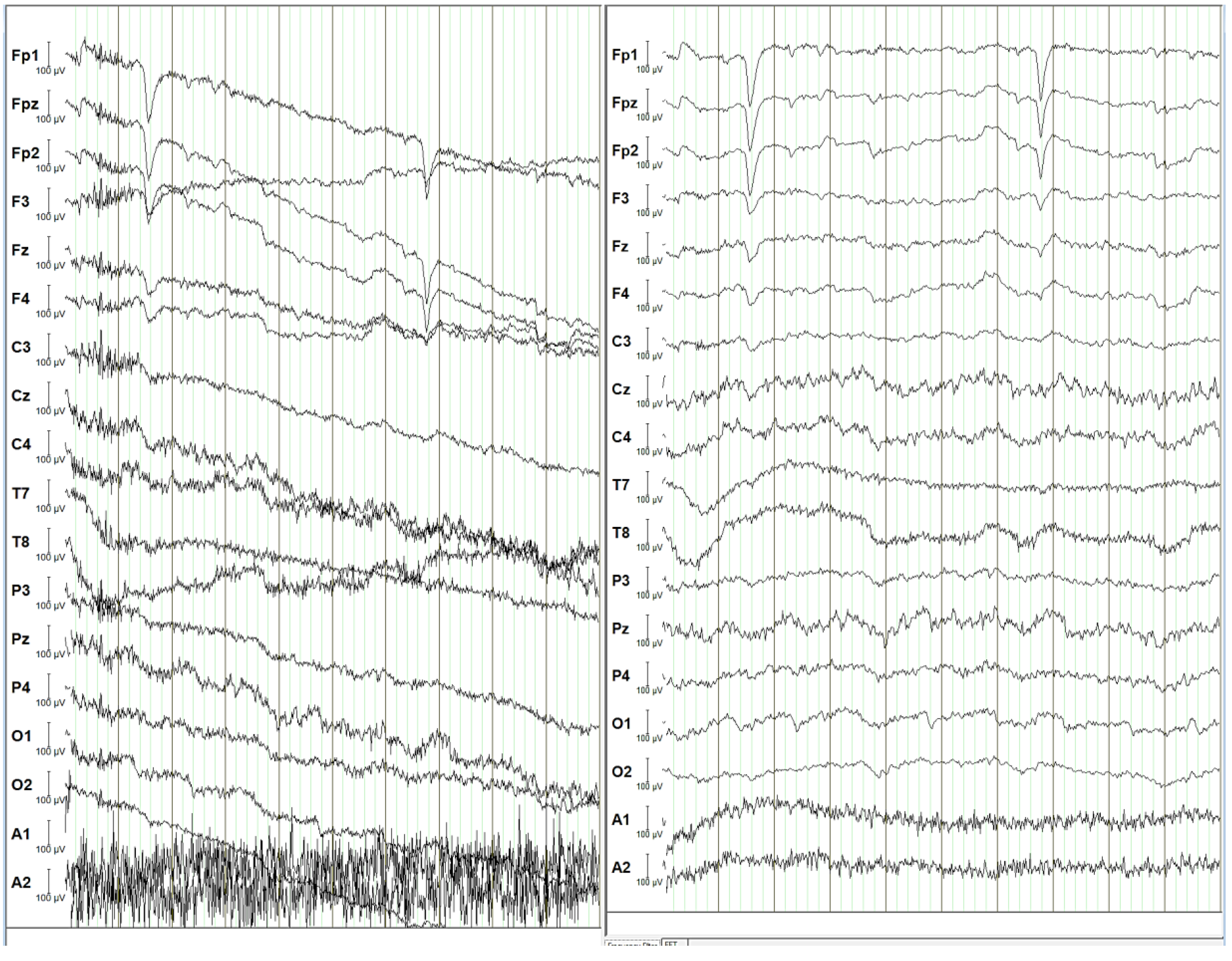
5.3. EEG Sensors
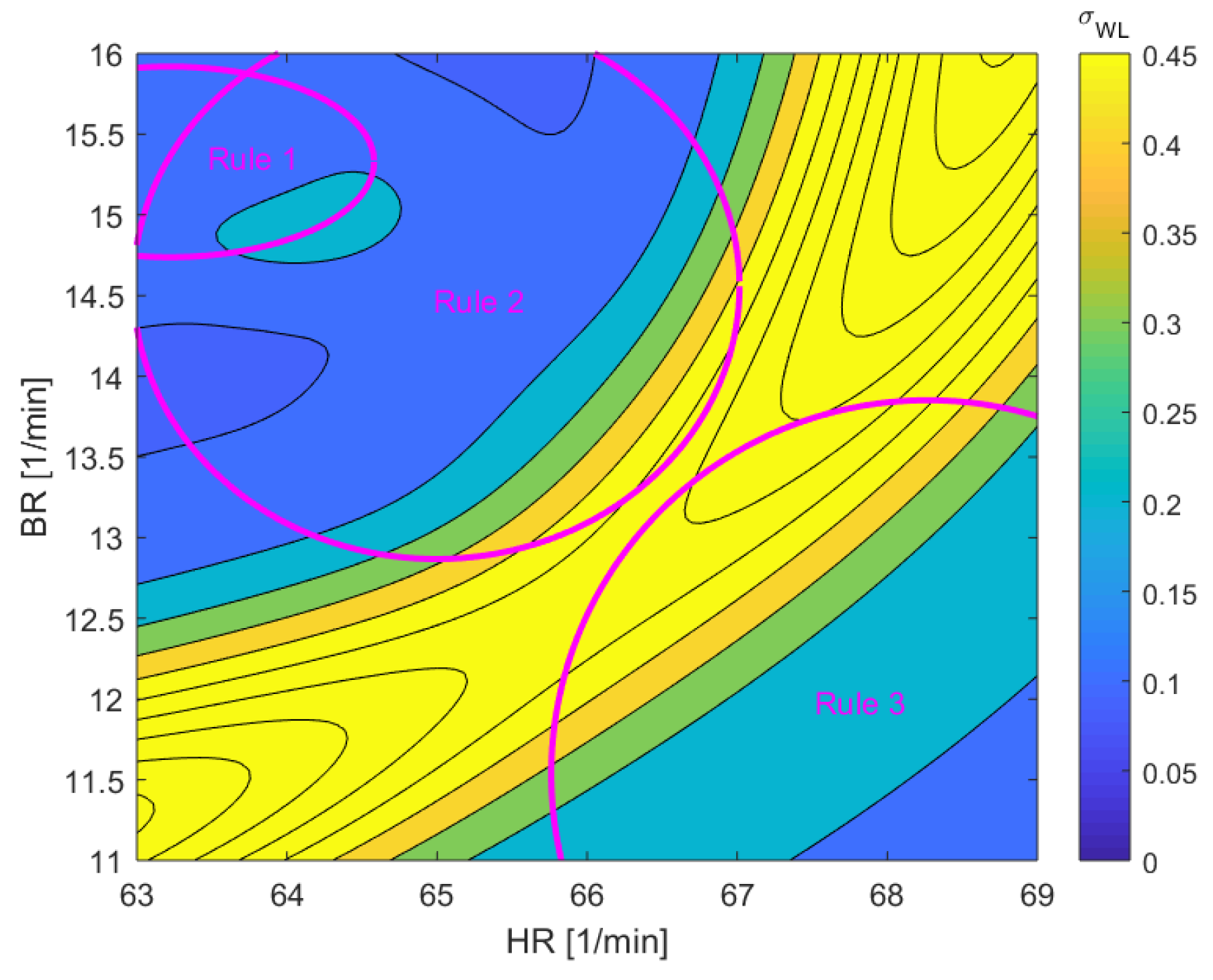
5.4. Propagation of Uncertainty
- If HR is high and BR is low, then MWL = 1
- If HR is mid and BR is mid then MWL = 0.5
- If HR is low and BR is high, then MWL = 0.1
6. Aerospace Applications
6.1. Single Pilot Operation and Unmanned Aircraft Systems
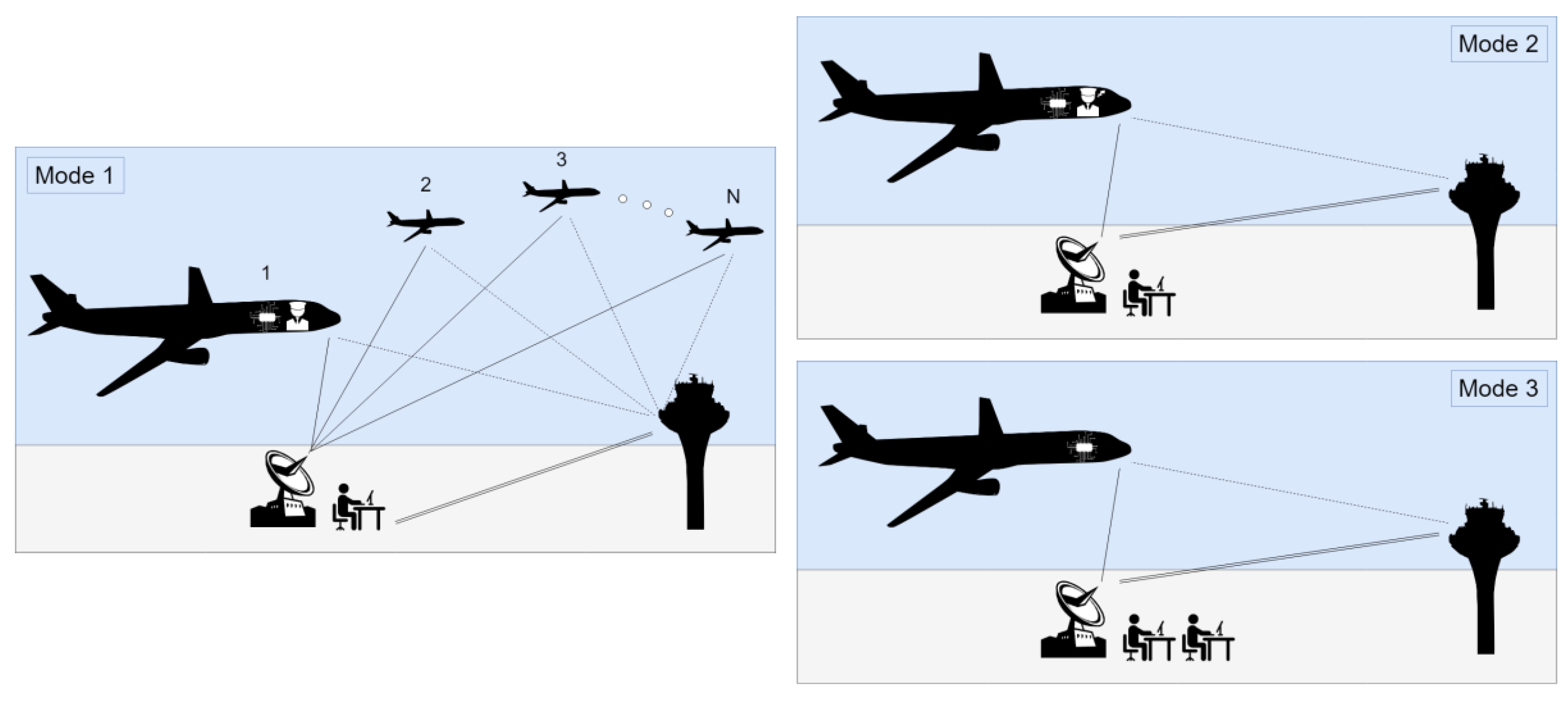
6.2. One-to-Many and Air Traffic Management
6.3. Space Applications
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gardi, A.; Ramasamy, S.; Kistan, T.; Sabatini, R. UAS in the Terminal Area: Challenges and Opportunities. In Encyclopedia of Aerospace Engineering; Blockley, R., Shyyeds, W., Eds.; John Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Hilton, S.; Sabatini, R.; Gardi, A.; Ogawa, H.; Teofilatto, P. Space traffic management: Towards safe and unsegregated space transport operations. Prog. Aerosp. Sci. 2019, 105, 98–125. [Google Scholar] [CrossRef]
- Lim, Y.; Gardi, A.; Sabatini, R.; Ramasamy, S.; Kistan, T.; Ezer, N.; Vince, J.; Bolia, R. Avionics Human-Machine Interfaces and Interactions for Manned and Unmanned Aircraft. Prog. Aerosp. Sci. 2018, 102, 1–46. [Google Scholar] [CrossRef]
- Kistan, T.; Gardi, A.; Sabatini, R. Machine Learning and Cognitive Ergonomics in Air Traffic Management: Recent Developments and Considerations for Certification. Aerospace 2018, 5, 103. [Google Scholar] [CrossRef]
- Liu, J.; Gardi, A.G.M.; Ramasamy, S.; Lim, Y.; Sabatini, R. Cognitive pilot-aircraft interface for single-pilot operations. Knowl.-Based Syst. 2016, 112, 37–53. [Google Scholar] [CrossRef]
- Lim, Y.; Ramasamy, S.; Gardi, A.; Kistan, T.; Sabatini, R. Cognitive Human-Machine Interfaces and Interactions for Unmanned Aircraft. J. Intell. Robot. Syst. 2018, 91, 755–774. [Google Scholar] [CrossRef]
- Charles, R.L.; Nixon, J. Measuring mental workload using physiological measures: A systematic review. Appl. Ergon. 2019, 74, 221–232. [Google Scholar] [CrossRef] [PubMed]
- Lim, Y.; Gardi, A.; Ramasamy, S.; Vince, J.; Pongracic, H.; Kistan, T.; Sabatini, R. A novel simulation environment for cognitive human factors engineering research. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–8. [Google Scholar]
- Lim, Y.; Gardi, A.; Pongsakornsathien, N.; Sabatini, R.; Ezer, N.; Kistan, T. Experimental characterisation of eye-tracking sensors for adaptive human-machine systems. Measurement 2019, 140, 151–160. [Google Scholar] [CrossRef]
- Gilland, J. Driving, Eye-Tracking and Visual Entropy: Exploration of Age and Task Effects; University of South Dakota: Vermillion, SD, USA, 2008. [Google Scholar]
- Dehais, F.; Peysakhovich, V.; Scannella, S.; Fongue, J.; Gateau, T. “Automation Surprise” in Aviation. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015; pp. 2525–2534. [Google Scholar]
- Di Nocera, F.; Camilli, M.; Terenzi, M. A random glance at the flight deck: Pilots’ scanning strategies and the real-time assessment of mental workload. J. Cogn. Eng. Decis. Mak. 2007, 1, 271–285. [Google Scholar] [CrossRef]
- Harris, R.L., Sr.; Glover, B.J.; Spady, A.A., Jr. Analytical Techniques of Pilot Scanning Behavior and Their Application; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 1986.
- Jacob, R.; Karn, K.S. Eye tracking in human-computer interaction and usability research: Ready to deliver the promises. Mind Eye 2003, 2, 573–605. [Google Scholar]
- Glaholt, M.G. Eye Tracking in the Cockpit: A Review of the Relationships between Eye Movements and the Aviator’s Cognitive State; Defence Research and Development Canada: Toronto, Canada, 2014.
- Jessee, M.S. Examining the Convergent and Discriminant Validity of Visual and Mental Workload Using Ocular Activity Variables; Army Research Laboratory: Adelphi, MD, USA, 2010. [Google Scholar]
- Salvucci, D.D.; Goldberg, J.H. Identifying fixations and saccades in eye-tracking protocols. In Proceedings of the 2000 Symposium on Eye Tracking Research & Applications, Palm Beach Gardens, FL, USA, 6–8 November 2000; pp. 71–78. [Google Scholar]
- McKinley, R.A.; McIntire, L.K.; Schmidt, R.; Repperger, D.W.; Caldwell, J.A. Evaluation of eye metrics as a detector of fatigue. Hum. Factors J. Hum. Factors Ergon. Soc. 2011, 53, 403–414. [Google Scholar] [CrossRef]
- Trutschel, U.; Sirois, B.; Sommer, D.; Golz, M.; Edwards, D. PERCLOS: An alertness measure of the past. In Proceedings of the Sixth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Olympic Valley-Lake Tahoe, CA, USA, 27–30 June 2011; pp. 172–179. [Google Scholar]
- Sommer, D.; Golz, M. Evaluation of PERCLOS based current fatigue monitoring technologies. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Buenos Aires, Argentina, 31 August–4 September 2010; pp. 4456–4459. [Google Scholar]
- Zhang, Z.; Zhang, J. A new real-time eye tracking based on nonlinear unscented Kalman filter for monitoring driver fatigue. J. Control Theory Appl. 2010, 8, 181–188. [Google Scholar] [CrossRef]
- Holmqvist, K.; Nyström, M.; Andersson, R.; Dewhurst, R.; Jarodzka, H.; Van de Weijer, J. Eye Tracking: A Comprehensive Guide to Methods and Measures; OUP Oxford: Oxford, UK, 2011. [Google Scholar]
- Kar, A.; Corcoran, P. Performance Evaluation Methods in Consumer Platforms. IEEE Access 2017, 5, 16495–16519. [Google Scholar] [CrossRef]
- Ashley EA, N.J. Cardiology Explained; Remedica: London, UK, 2004. [Google Scholar]
- Shaffer, F.; Ginsberg, J.P. An Overview of Heart Rate Variability Metrics and Norms. Front. Public Health 2017, 5, 258. [Google Scholar] [CrossRef] [PubMed]
- Malik, M. Heart rate variability standards of measurement, physiological interpretation, and clinical use. Eur. Heart J. 1996, 17, 354–381. [Google Scholar] [CrossRef]
- Brennan, M.; Palaniswami, M.; Kamen, P. Do existing measures of Poincare plot geometry reflect nonlinear features of heart rate variability? IEEE Trans. Biomed. Eng. 2001, 48, 1342–1347. [Google Scholar] [CrossRef] [PubMed]
- Hailstone, J.; Kilding, A.E. Reliability and Validity of the Zephyr BioHarness to Measure Respiratory Responses to Exercise. Meas. Phys. Educ. Exerc. Sci. 2011, 15, 293–300. [Google Scholar] [CrossRef]
- James, A.J.; Paul, A.F.; Gerwyn, H.; Tim, W.; Andrew, T.G. Bioharness multivariable monitoring device: Part I: Validity. J. Sports Sci. Med. 2012, 11, 400–408. [Google Scholar]
- Johnstone, J.A.; Ford, P.A.; Hughes, G.; Watson, T.; Garrett, A.T. Bioharness Multivariable Monitoring Device: Part II: Reliability. J. Sports Sci. Med. 2012, 11, 409–417. [Google Scholar]
- Nazari, G.; MacDermid, J.C.; Sinden, K.E.; Richardson, J.; Tang, A.; Kin, K.E.S.R. Reliability of Zephyr Bioharness and Fitbit Charge Measures of Heart Rate and Activity at Rest, During the Modified Canadian Aerobic Fitness Test and Recovery. J. Strength Cond. Res. 2019, 33, 559–571. [Google Scholar] [CrossRef]
- Nunan, D.; Donovan, G.A.Y.; Jakovljevic, D.G.; Hodges, L.D.; Sandercock, G.R.; Brodie, D.A. Validity and Reliability of Short-Term Heart-Rate Variability from the Polar S810. Med. Sci. Sports Exerc. 2009, 41, 243–250. [Google Scholar] [CrossRef]
- Mansikka, H.; Virtanen, K.; Harris, D.; Simola, P. Fighter pilots’ heart rate, heart rate variation and performance during an instrument flight rules proficiency test. Appl. Ergon. 2016, 56, 213–219. [Google Scholar] [CrossRef] [PubMed]
- Grassmann, M.; Vlemincx, E.; Von Leupoldt, A.; Mittelstädt, J.M.; Van den Bergh, O. Respiratory changes in response to cognitive load: A systematic review. Neural Plast. 2016, 2016, 8146809. [Google Scholar] [CrossRef] [PubMed]
- Fallahi, M.; Motamedzade, M.; Heidarimoghadam, R.; Soltanian, A.R.; Miyake, S. Effects of mental workload on physiological and subjective responses during traffic density monitoring: A field study. Appl. Ergon. 2016, 52, 95–103. [Google Scholar] [CrossRef] [PubMed]
- Sauvet, F.; Jouanin, J.C.; Langrume, C.; Van Beers, P.; Papelier, Y.; Dussault, C. Heart Rate Variability in Novice Pilots During and After a Multi-Leg Cross-Country Flight. Aviat. Space Environ. Med. 2009, 80, 862–869. [Google Scholar] [CrossRef] [PubMed]
- Backs, R.W.; Navidzadeh, H.T.; Xu, X. Cardiorespiratory Indices of Mental Workload during Simulated Air Traffic Control. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Diego, CA, USA, 30 July–4 August 2000; Volume 44, pp. 89–92. [Google Scholar]
- Vlemincx, E.; Taelman, J.; De Peuter, S.; Van Diest, I.; Van den Bergh, O. Sigh rate and respiratory variability during mental load and sustained attention. Psychophysiology 2010, 48, 117–120. [Google Scholar] [CrossRef] [PubMed]
- Mehta, R.K.; Parasuraman, R. Neuroergonomics: A review of applications to physical and cognitive work. Front. Hum. Neurosci. 2013, 7, 889. [Google Scholar] [CrossRef] [PubMed]
- Niedermeyer, E.; da Silva, F.L. Electroencephalography: Basic Principles, Clinical Applications, and Related Fields; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2005. [Google Scholar]
- Bunce, S.; Izzetoglu, M.; Izzetoglu, K.; Onaral, B.; Pourrezaei, K. Functional near-infrared spectroscopy. IEEE Eng. Med. Boil. Mag. 2006, 25, 54–62. [Google Scholar] [CrossRef]
- Ariely, D.; Berns, G.S. Neuromarketing: The hope and hype of neuroimaging in business. Nat. Rev. Neurosci. 2010, 11, 284–292. [Google Scholar] [CrossRef]
- Klimesch, W. Memory processes, brain oscillations and EEG synchronization. Int. J. Psychophysiol. 1996, 24, 61–100. [Google Scholar] [CrossRef]
- Duschek, S.; Schandry, R. Functional transcranial Doppler sonography as a tool in psychophysiological research. Psychophysiology 2003, 40, 436–454. [Google Scholar] [CrossRef]
- Ferrari, M.; Quaresima, V. A brief review on the history of human functional near-infrared spectroscopy (fNIRS) development and fields of application. Neuroimage 2012, 63, 921–935. [Google Scholar] [CrossRef] [PubMed]
- Stroobant, N.; Vingerhoets, G. Transcranial Doppler ultrasonography monitoring of cerebral hemodynamics during performance of cognitive tasks: A review. Neuropsychol. Rev. 2000, 10, 213–231. [Google Scholar] [CrossRef] [PubMed]
- Aguirre, G.; Zarahn, E.; D’Esposito, M. The variability of human, BOLD hemodynamic responses. Neuroimage 1998, 8, 360–369. [Google Scholar] [CrossRef] [PubMed]
- Burle, B.; Spieser, L.; Roger, C.; Casini, L.; Hasbroucq, T.; Vidal, F. Spatial and temporal resolutions of EEG: Is it really black and white? A scalp current density view. Int. J. Psychophysiol. 2015, 97, 210–220. [Google Scholar] [CrossRef] [PubMed]
- Katona, J.; Kővári, A. The Evaluation of BCI and PEBL-based Attention Tests. Acta Polytech. Hung. 2018, 15, 225–249. [Google Scholar]
- Katona, J.; Kővári, A. A Brain–Computer Interface Project Applied in Computer Engineering. IEEE Trans. Educ. 2016, 59, 319–326. [Google Scholar] [CrossRef]
- Borghini, G.; Aricò, P.; Di Flumeri, G.; Salinari, S.; Colosimo, A.; Bonelli, S.; Napoletano, L.; Ferreira, A.; Babiloni, F. Avionic technology testing by using a cognitive neurometric index: A study with professional helicopter pilots. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 6182–6185. [Google Scholar]
- Bailey, N.R.; Scerbo, M.W.; Freeman, F.G.; Mikulka, P.J.; Scott, L.A. Comparison of a brain-based adaptive system and a manual adaptable system for invoking automation. Hum. Factors J. Hum. Factors Ergon. Soc. 2006, 48, 693–709. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Hope, R.M.; Wang, Z.; Ji, Q.; Gray, W.D. Cross-subject workload classification with a hierarchical Bayes model. NeuroImage 2012, 59, 64–69. [Google Scholar] [CrossRef] [PubMed]
- Saha, P.K.; Tiwari, T.; Singh, I.L. Percieved Mental Workload in a Simulated Task: Psychophysiological Evidence. J. Indian Acad. Appl. Psychol. 2012, 38, 220–233. [Google Scholar]
- Dussault, C.; Jouanin, J.-C.; Philippe, M.; Guezennec, C.-Y. EEG and ECG changes during simulator operation reflect mental workload and vigilance. Aviat. Space Environ. Med. 2005, 76, 344–351. [Google Scholar]
- Sterman, M.B.; Mann, C.A.; Kaiser, D.A.; Suyenobu, B.Y. Multiband topographic EEG analysis of a simulated visuomotor aviation task. Int. J. Psychophysiol. 1994, 16, 49–56. [Google Scholar] [CrossRef]
- Brookings, J.B.; Wilson, G.F.; Swain, C.R. Psychophysiological responses to changes in workload during simulated air traffic control. Biol. Psychol. 1996, 42, 361–377. [Google Scholar] [CrossRef]
- Hankins, T.C.; Wilson, G.F. A comparison of heart rate, eye activity, EEG and subjective measures of pilot mental workload during flight. Aviat. Space Environ. Med. 1998, 69, 360–367. [Google Scholar] [PubMed]
- Fournier, L.R.; Wilson, G.F.; Swain, C.R. Electrophysiological, behavioral, and subjective indexes of workload when performing multiple tasks: Manipulations of task difficulty and training. Int. J. Psychophysiol. 1999, 31, 129–145. [Google Scholar] [CrossRef]
- Mann, C.A.; Kaiser, D.A.; Sterman, M.B. Quantitative EEG patterns of differential in-flight workload. In Proceedings of the Sixth Annual Workshop on Space Operations Applications and Research (SOAR 1992), Houston, TX, USA, 4–6 August 1992; NASA Johnson Space Center: Houston, TX, USA, 1993; pp. 466–473. [Google Scholar]
- Ryu, K.; Myung, R. Evaluation of mental workload with a combined measure based on physiological indices during a dual task of tracking and mental arithmetic. Int. J. Ind. Ergon. 2005, 35, 991–1009. [Google Scholar] [CrossRef]
- Chandra, S.; Sharma, G.; Verma, K.L.; Mittal, A.; Jha, D. EEG based cognitive workload classification during NASA MATB-II multitasking. Int. J. Cogn. Res. Sci. Eng. Educ. 2015, 3, 35–41. [Google Scholar]
- Christensen, J.C.; Estepp, J.R. Co-adaptive aiding and automation enhance operator performance. Hum. Factors J. Hum. Factors Ergon. Soc. 2013, 55, 965–975. [Google Scholar] [CrossRef]
- Wilson, G.F.; Russell, C.A. Performance enhancement in an uninhabited air vehicle task using psychophysiologically determined adaptive aiding. Hum. Factors 2007, 49, 1005–1018. [Google Scholar] [CrossRef]
- Wilson, G.F.; Russell, C.A.; Monnin, J.W.; Estepp, J.; Christensen, J.C. How does day-to-day variability in psychophysiological data affect classifier accuracy? In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Francisco, CA, USA, 27 September–1 October 2010; pp. 264–268. [Google Scholar]
- East, J.A.; Bauer, K.W., Jr.; Lanning, J.W. Feature selection for predicting pilot mental workload: A feasibility study. Int. J. Smart Eng. Syst. Des. 2002, 4, 183–193. [Google Scholar] [CrossRef]
- Laine, T.; Bauer, K.; Lanning, J.; Russell, C.; Wilson, G. Selection of input features across subjects for classifying crewmember workload using artificial neural networks. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2002, 32, 691–704. [Google Scholar] [CrossRef]
- McDonald, N.J.; Soussou, W. Quasar’s qstates cognitive gauge performance in the cognitive state assessment competition 2011. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 6542–6546. [Google Scholar]
- Smith, M.E.; Gevins, A. Neurophysiologic monitoring of mental workload and fatigue during operation of a flight simulator. Def. Secur. 2005, 5797, 116–126. [Google Scholar]
- Gevins, A.; Brown, H.; Karnik, A.; Du, R.; Smith, M.E. Monitoring task loading with multivariate EEG measures during complex forms of human-computer interaction. Hum. Factors J. Hum. Factors Ergon. Soc. 2001, 43, 366–380. [Google Scholar]
- Aricò, P.; Borghini, G.; Di Flumeri, G.; Colosimo, A.; Bonelli, S.; Golfetti, A.; Pozzi, S.; Imbert, J.-P.; Granger, G.; Benhacene, R.; et al. Adaptive automation triggered by EEG-based mental workload index: A passive brain-computer interface application in realistic air traffic control environment. Front. Hum. Neurosci. 2016, 10, 539. [Google Scholar] [CrossRef]
- Aricò, P.; Borghini, G.; Graziani, I.; Imbert, J.P.; Granger, G.; Benhacene, R.; Pozzi, S.; Napoletano, L.; Di Flumeri, G.; Colosimo, A.; et al. Air-traffic-controllers (ATCO): Neurophysiological analysis of training and workload. Ital. J. Aerosp. Med. 2015, 12, 18–34. [Google Scholar]
- Aricò, P.; Borghini, G.; Di Flumeri, G.; Colosimo, A.; Graziani, I.; Imbert, J.-P.; Granger, G.; Benhacene, R.; Terenzi, M.; Pozzi, S.; et al. Reliability over time of EEG-based mental workload evaluation during Air Traffic Management (ATM) tasks. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 7242–7245. [Google Scholar]
- Borghini, G.; Aricὸ, P.; Graziani, I.; Salinari, S.; Babiloni, F.; Imbert, J.P.; Granger, G.; Benhacene, R.; Napoletano, L.; Terenzi, M.; et al. Analysis of neurophysiological signals for the training and mental workload assessment of ATCos. In Proceedings of the SESAR 2014, 4th SESAR Innovation Days, Madrid, Spain, 25–27 November 2014. [Google Scholar]
- Poythress, M.; Russell, C.; Siegel, S.; Tremoulet, P.D.; Craven, P.L.; Berka, C.; Levendowski, D.J.; Chang, D.; Baskin, A.; Champney, R.; et al. Correlation between Expected Workload and EEG Indices of Cognitive Workload and Task Engagement. In Proceedings of the 2nd Annual Augmented Cognition International Conference, San Francisco, CA, USA, 15–20 October 2006. [Google Scholar]
- Berka, C.; Levendowski, D.J.; Ramsey, C.K.; Davis, G.; Lumicao, M.N.; Stanney, K.; Reeves, L.; Regli, S.H.; Tremoulet, P.D.; Stibler, K. Evaluation of an EEG workload model in an Aegis simulation environment. Def. Secur. 2005, 5797, 90–99. [Google Scholar]
- Pope, A.T.; Bogart, E.H.; Bartolome, D.S. Biocybernetic system evaluates indices of operator engagement in automated task. Biol. Psychol. 1995, 40, 187–195. [Google Scholar] [CrossRef]
- Freeman, F.G.; Mikulka, P.J.; Prinzel, L.J.; Scerbo, M.W. Evaluation of an adaptive automation system using three EEG indices with a visual tracking task. Biol. Psychol. 1999, 50, 61–76. [Google Scholar] [CrossRef]
- Prinzel, L.J.; Freeman, F.G.; Scerbo, M.W.; Mikulka, P.J.; Pope, A.T. A closed-loop system for examining psychophysiological measures for adaptive task allocation. Int. J. Aviat. Psychol. 2000, 10, 393–410. [Google Scholar] [CrossRef]
- Fairclough, S.H.; Venables, L.; Tattersall, A. The influence of task demand and learning on the psychophysiological response. Int. J. Psychophysiol. 2005, 56, 171–184. [Google Scholar] [CrossRef]
- Senoussi, M.; Verdiere, K.J.; Bovo, A.; Chanel, C.P.C.; Roy, R.N.; Dehais, F. Pre-stimulus antero-posterior EEG connectivity predicts performance in a UAV monitoring task. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1167–1172. [Google Scholar]
- Zhang, G.; Wang, W.; Pepe, A.; Xu, R.; Schnell, T.; Anderson, N.; Heitkamp, D.; Li, J.; Li, F.; McKenzie, F. A systematic approach for real-time operator functional state assessment. In Proceedings of the MODSIM World 2011 Conference and Expo., Virginia Beach, VA, USA, 11 October 2012; pp. 190–199. [Google Scholar]
- Zhang, G.; Xu, R.; Wang, W.; Pepe, A.A.; Li, F.; Li, J.; McKenzie, F.; Schnell, T.; Anderson, N.; Heitkamp, D. Model Individualization for Real-Time Operator Functional State Assessment. In Advances in Human Aspects of Aviation; CRC Press: Boca Raton, FL, USA, 2012; p. 417. [Google Scholar]
- Harrivel, A.R.; Stephens, C.L.; Milletich, R.J.; Heinich, C.M.; Last, M.C.; Napoli, N.J.; Abraham, N.; Prinzel, L.J.; Motter, M.A.; Pope, A.T. Prediction of cognitive states during flight simulation using multimodal psychophysiological sensing. In Proceedings of the AIAA Information Systems-AIAA Infotech, Grapevine, TX, USA, 2017; p. 1135. [Google Scholar]
- Berka, C.; Levendowski, D.J.; Cvetinovic, M.M.; Petrovic, M.M.; Davis, G.; Lumicao, M.N.; Zivkovic, V.T.; Popovic, M.V.; Olmstead, R. Real-time analysis of EEG indexes of alertness, cognition, and memory acquired with a wireless EEG headset. Int. J. Hum.-Comput. Interact. 2004, 17, 151–170. [Google Scholar] [CrossRef]
- Çakır, M.P.; Şenyiğit, A.M.; Akay, D.M.; Ayaz, H.; İşler, V. Evaluation of UAS Camera Operator Interfaces in a Simulated Task Environment: An Optical Brain Imaging Approach. In Proceedings of the International Conference on Brain Inspired Cognitive Systems, Shenyang, China, 11–14 July 2012; pp. 62–71. [Google Scholar]
- Çakır, M.P.; Vural, M.; Koç, S.Ö.; Toktaş, A.; Schmorrow, D.D.; Fidopiastis, C.M. Real-Time Monitoring of Cognitive Workload of Airline Pilots in a Flight Simulator with fNIR Optical Brain Imaging Technology. In Proceedings of the International Conference on Augmented Cognition, Toronto, ON, Canada, 17–22 July 2016; pp. 147–158. [Google Scholar]
- Durantin, G.; Gagnon, J.-F.; Tremblay, S.; Dehais, F. Using near infrared spectroscopy and heart rate variability to detect mental overload. Behav. Brain Res. 2014, 259, 16–23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harrison, J.; Izzetoglu, K.; Ayaz, H.; Willems, B.; Hah, S.; Woo, H.; Shewokis, P.A.; Bunce, S.C.; Onaral, B. Human performance assessment study in aviation using functional near infrared spectroscopy. In Proceedings of the International Conference on Augmented Cognition, Las Vegas, NV, USA, 21–26 July 2013; pp. 433–442. [Google Scholar]
- Ahlstrom, U.; Dworsky, M. Effects of Weather Presentation Symbology on General Aviation Pilot Behavior, Workload, and Visual Scanning; DOT/FAA/TC-14/41; Federal Aviation Administration (FAA): Washington, DC, USA, 2012.
- Menda, J.; Hing, J.T.; Ayaz, H.; Shewokis, P.A.; Izzetoglu, K.; Onaral, B.; Oh, P. Optical brain imaging to enhance UAV operator training, evaluation, and interface development. J. Intell. Robot. Syst. 2011, 61, 423–443. [Google Scholar] [CrossRef]
- Ayaz, H.; Willems, B.; Bunce, S.; Shewokis, P.A.; Izzetoglu, K.; Hah, S.; Deshmukh, A.; Onaral, B. Estimation of Cognitive Workload during Simulated Air Traffic Control Using Optical Brain Imaging Sensors. In Proceedings of the International Conference on Foundations of Augmented Cognition, Orlando, FL, USA, 9–14 July 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 549–558. [Google Scholar]
- Afergan, D.; Peck, E.M.; Solovey, E.T.; Jenkins, A.; Hincks, S.W.; Brown, E.T.; Chang, R.; Jacob, R.J. Dynamic difficulty using brain metrics of workload. In Proceedings of the 32nd Annual ACM Conference on Human Factors in Computing Systems, Toronto, Canada, 26 April–1 May 2014; pp. 3797–3806. [Google Scholar]
- McKendrick, R.; Parasuraman, R.; Murtza, R.; Formwalt, A.; Baccus, W.; Paczynski, M.; Ayaz, H. Into the Wild: Neuroergonomic Differentiation of Hand-Held and Augmented Reality Wearable Displays during Outdoor Navigation with Functional Near Infrared Spectroscopy. Front. Hum. Neurosci. 2016, 10, 216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Izzetoglu, K.; Bunce, S.; Onaral, B.; Pourrezaei, K.; Chance, B. Functional optical brain imaging using near-infrared during cognitive tasks. Int. J. Hum.-Comput. Interact. 2004, 17, 211–227. [Google Scholar] [CrossRef]
- Verdière, K.J.; Roy, R.N.; Dehais, F. Detecting Pilot’s Engagement Using fNIRS Connectivity Features in an Automated vs. Manual Landing Scenario. Front. Hum. Neurosci. 2018, 12, 6. [Google Scholar] [CrossRef] [PubMed]
- Durantin, G.; Scannella, S.; Gateau, T.; Delorme, A.; Dehais, F. Processing Functional Near Infrared Spectroscopy Signal with a Kalman Filter to Assess Working Memory during Simulated Flight. Front. Hum. Neurosci. 2016, 9, 707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gateau, T.; Durantin, G.; Lancelot, F.; Scannella, S.; Dehais, F. Real-time state estimation in a flight simulator using fNIRS. PLoS ONE 2015, 10, e0121279. [Google Scholar] [CrossRef] [PubMed]
- Ayaz, H.; Onaral, B.; Izzetoglu, K.; Shewokis, P.A.; McKendrick, R.; Parasuraman, R. Continuous monitoring of brain dynamics with functional near infrared spectroscopy as a tool for neuroergonomic research: Empirical examples and a technological development. Front. Hum. Neurosci. 2013, 7, 871. [Google Scholar] [CrossRef]
- Ahn, S.; Nguyen, T.; Jang, H.; Kim, J.G.; Jun, S.C. Exploring Neuro-Physiological Correlates of Drivers’ Mental Fatigue Caused by Sleep Deprivation Using Simultaneous EEG, ECG, and fNIRS Data. Front. Hum. Neurosci. 2016, 10, 219. [Google Scholar] [CrossRef]
- Urigüen, J.A.; García-Zapirain, B. EEG artifact removal—State-of-the-art and guidelines. J. Neural Eng. 2015, 12, 031001. [Google Scholar] [CrossRef]
- Usakli, A.B. Improvement of EEG Signal Acquisition: An Electrical Aspect for State of the Art of Front End. Comput. Intell. Neurosci. 2010, 2010, 630649. [Google Scholar] [CrossRef] [PubMed]
- Sweeney, K.T.; Ward, T.E.; McLoone, S.F. Artifact Removal in Physiological Signals—Practices and Possibilities. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 488–500. [Google Scholar] [CrossRef] [PubMed]
- Weston, D. Electromagnetic Compatability: Principles and Applications; Marcel Dekker: New York, NY, USA, 1991. [Google Scholar]
- Fayek, H.M.; Lech, M.; Cavedon, L. Evaluating deep learning architectures for Speech Emotion Recognition. Neural Netw. 2017, 92, 60–68. [Google Scholar] [CrossRef] [PubMed]
- Huang, Z.; Dong, M.; Mao, Q.; Zhan, Y. Speech Emotion Recognition Using CNN. In Proceedings of the 22nd ACM international conference on Multimedia, Orlando, FL, USA, 3–7 November 2014. [Google Scholar]
- Lim, W.; Jang, D.; Lee, T. Speech Emotion Recognition Using Convolutional and Recurrent Neural Networks. In Proceedings of the 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Jeju, Korea, 13–16 December 2016. [Google Scholar]
- Mao, Q.R.; Dong, M.; Huang, Z.W.; Zhan, Y.Z. Learning Salient Features for Speech Emotion Recognition Using Convolutional Neural Networks. IEEE Trans. Multimed. 2014, 16, 2203–2213. [Google Scholar] [CrossRef]
- Mirsamadi, S.; Barsoum, E.; Zhang, C. Automatic speech emotion recognition using recurrent neural networks with local attention. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 2227–2231. [Google Scholar]
- Sahidullah, M.; Saha, G. Design, analysis and experimental evaluation of block based transformation in MFCC computation for speaker recognition. Speech Commun. 2012, 54, 543–565. [Google Scholar] [CrossRef]
- Mohammadi, M.; Mohammadi, H.R.S. Robust features fusion for text independent speaker verification enhancement in noisy environments. In Proceedings of the 2017 Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017. [Google Scholar]
- Amarakeerthi, S.; Morikawa, C.; Nwe, T.L.; De Silva, L.C.; Cohen, M. Cascaded Subband Energy-Based Emotion Classification. IEEJ Trans. Electron. Inf. Syst. 2013, 133, 200–210. [Google Scholar] [CrossRef]
- Lech, M.; Stolar, M.; Bolia, R.; Skinner, M. Amplitude-Frequency Analysis of Emotional Speech Using Transfer Learning and Classification of Spectrogram Images. Adv. Sci. Technol. Eng. Syst. J. 2018, 3, 363–371. [Google Scholar] [CrossRef]
- Vukovic, M.; Sethu, V.; Parker, J.; Cavedon, L.; Lech, M.; Thangarajah, J. Estimating cognitive load from speech gathered in a complex real-life training exercise. Int. J. Hum.-Comput. Stud. 2019, 124, 116–133. [Google Scholar] [CrossRef]
- Ko, B.C. A Brief Review of Facial Emotion Recognition Based on Visual Information. Sensors 2018, 18, 401. [Google Scholar] [CrossRef] [PubMed]
- Essa, I.; Pentland, A. Coding, analysis, interpretation, and recognition of facial expressions. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 757–763. [Google Scholar] [CrossRef]
- Zhang, L.; Tong, Y.; Ji, Q. Active Image Labeling and Its Application to Facial Action Labeling. In Proceedings of the European Conference on Computer Vision 2008, Marseille, France, 12–18 October 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 706–719. [Google Scholar]
- Tian, Y.-L.; Kanade, T.; Cohn, J.F. Recognizing action units for facial expression analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 97–115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fydanaki, A.; Geradts, Z. Evaluating OpenFace: An open-source automatic facial comparison algorithm for forensics. Forensic Sci. Res. 2018, 3, 202–209. [Google Scholar] [CrossRef] [PubMed]
- Baltrusaitis, T.; Robinson, P.; Morency, L.-P. OpenFace: An open source facial behavior analysis toolkit. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–9 March 2016; pp. 1–10. [Google Scholar]
- Du, S.; Tao, Y.; Martinez, A.M. Compound facial expressions of emotion. Proc. Natl. Acad. Sci. USA 2014, 111, E1454–E1462. [Google Scholar] [CrossRef] [PubMed]
- Kumar, M.; Weippert, M.; Vilbrandt, R.; Kreuzfeld, S.; Stoll, R. Fuzzy evaluation of heart rate signals for mental stress assessment. IEEE Trans. Fuzzy Syst. 2007, 15, 791–808. [Google Scholar] [CrossRef]
- Said, R.N.; Loukia, H. Applying the concept of experton to fuzzy mental workload modeling. Fuzzy Econ. Rev. 2003, 8, 39–63. [Google Scholar]
- Berka, C.; Levendowski, D.J.; Lumicao, M.N.; Yau, A.; Davis, G.; Zivkovic, V.T.; E Olmstead, R.; Tremoulet, P.D.; Craven, P.L. EEG correlates of task engagement and mental workload in vigilance, learning, and memory tasks. Aviat. Space Environ. Med. 2007, 78, B231–B244. [Google Scholar] [PubMed]
- Besson, P.; Bourdin, C.; Bringoux, L.; Dousset, E.; Maiano, C.; Marqueste, T.; Mestre, D.R.; Gaetan, S.; Baudry, J.-P.; Vercher, J.-L. Effectiveness of physiological and psychological features to estimate helicopter pilots’ workload: A Bayesian network approach. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1872–1881. [Google Scholar] [CrossRef]
- Liang, Y.; Lee, J.D. A hybrid Bayesian Network approach to detect driver cognitive distraction. Transp. Res. Part C Emerg. Technol. 2014, 38, 146–155. [Google Scholar] [CrossRef] [Green Version]
- Ke, Y.; Qi, H.; Zhang, L.; Chen, S.; Jiao, X.; Zhou, P.; Zhao, X.; Wan, B.; Ming, D. Towards an effective cross-task mental workload recognition model using electroencephalography based on feature selection and support vector machine regression. Int. J. Psychophysiol. 2015, 98, 157–166. [Google Scholar] [CrossRef]
- Stansinoupolos, P.; Smith, M.H.; Hargroves, K.; Desha, C. Whole System Design: An Integrated Approach to Sustainable Engineering; Routledge: Abingdon, UK, 2013. [Google Scholar]
- Yin, Z.; Zhang, J.; Wang, R. Neurophysiological Feature-Based Detection of Mental Workload by Ensemble Support Vector Machines. In Advances in Cognitive Neurodynamics; Springer: New York City, NY, USA, 2016; pp. 469–475. [Google Scholar]
- Abraham, A. Adaptation of fuzzy inference system using neural learning. In Fuzzy Systems Engineering; Springer: Berlin/Heidelberg, Germany, 2005; pp. 53–83. [Google Scholar]
- Vieira, J.; Dias, F.M.; Mota, A. Neuro-fuzzy systems: A survey. In Proceedings of the 5th WSEAS NNA International Conference, Udine, Italy, 25–27 March 2004. [Google Scholar]
- Puma, S.; Matton, N.; Paubel, P.-V.; Raufaste, É.; El-Yagoubi, R. Using theta and alpha band power to assess cognitive workload in multitasking environments. Int. J. Psychophysiol. 2018, 123, 111–120. [Google Scholar] [CrossRef]
- Jang, J.-S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- ICAO. Global and Regional 20-Year Forecasts; ICAO: Montreal, QC, Canada, 2011. [Google Scholar]
- Comerford, D.; Brandt, S.L.; Lachter, J.B.; Wu, S.C.; Mogford, R.H.; Battiste, V.; Johnson, W.W. NASA’s Single-Pilot Operations Technical Interchange Meeting: Proceedings and Findings; NASA, Ames Research Center: Moffett Field, CA, USA, 2013.
- Lim, Y.; Bassien-Capsa, V.; Ramasamy, S.; Liu, J.; Sabatini, R. Commercial airline single-pilot operations: System design and pathways to certification. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 4–21. [Google Scholar] [CrossRef]
- Wolter, C.A.; Gore, B.F. A Validated Task Analysis of the Single Pilot Operations Concept; NASA/TM-2015-218480; NASA Ames Research Center: Moffett Field, CA, USA, 2015.
- Scott, S.D.; Mercier, S.; Cummings, M.L.; Wang, E. Assisting Interruption Recovery in Supervisory Control of Multiple Uavs. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2006, 50, 699–703. [Google Scholar] [CrossRef] [Green Version]
- Ruff, H.A.; Calhoun, G.L.; Draper, M.H.; Fontejon, J.V.; Guilfoos, B.J. Exploring Automation Issues in Supervisory Control of Multiple UAVs; Sytronics Inc.: Dayton, OH, USA, 2004. [Google Scholar]
- Lim, Y.; Ranasinghe, K.; Gardi, A.; Ezer, N.; Sabatini, R. Human-machine interfaces and interactions for multi UAS operations. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences (ICAS 2018), Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Lim, Y.; Samreeloy, T.; Chantaraviwat, C.; Ezer, N.; Gardi, A.; Sabatini, R. Cognitive Human-Machine Interfaces and Interactions for Multi-UAV Operations. In Proceedings of the 18th Australian International Aerospace Congress (AIAC18), Melbourne, Australia, 24–28 February 2019. [Google Scholar]
- Athènes, S.; Averty, P.; Puechmorel, S.; Delahaye, D.; Collet, C. ATC complexity and controller workload: Trying to bridge the gap. In Proceedings of the International Conference on Human-Computer Interaction in Aeronautics (HCI-02), Cambridge, MA, USA, 23–25 October 2002. [Google Scholar]
- Boyce, P.R. Sinus Arrhythmia as a Measure of Mental Load. Ergonomics 1974, 17, 177–183. [Google Scholar] [CrossRef]
- Alonso, R.; Causse, M.; Vachon, F.; Parise, R.; Dehais, F.; Terrier, P. Evaluation of head-free eye tracking as an input device for air traffic control. Ergonomics 2013, 56, 246–255. [Google Scholar] [CrossRef] [Green Version]
- Wickens, C.; Mavor, A.S.; Mcgee, J.P. Flight to the Future: Human Factors in Air Traffic Control; National Academies Press: Washington, DC, USA, 1997. [Google Scholar]
- Luckowski, S.M. Bioinstrumentation: Biomedical Results of Apollo; NASA Johnson Space Center: Houston, TX, USA, 1975.
- Cupples, J.S.; Johnson, B.J. Future Space Bioinstrumentation Systems; SAE Technical Paper: Warrendale, PA, USA, 2005. [Google Scholar]
- National Aeronautics and Space Administration, CHeCS Hardware Catalog; NASA Medical Operations; NASA Johnson Space Center: Houston, TX, USA, 2011.
- Kanas, N.; Manzey, D. Space Psychology and Psychiatry; Springer Science & Business Media: Berlin, Germany, 2008; Volume 22. [Google Scholar]
- Gabriel, G.; Navas, J.M.M.; Bozal, R.G. Neurocognitive performance using the Windows spaceflight cognitive assessment tool (WinSCAT) in human spaceflight simulations. Aerosp. Sci. Technol. 2014, 35, 87–92. [Google Scholar]
- Mundt, C.W.; Montgomery, K.N.; Udoh, U.E.; Barker, V.N.; Thonier, G.C.; Tellier, A.M.; Ricks, R.D.; Darling, R.B.; Cagle, Y.D.; Cabrol, N.A.; et al. A multiparameter wearable physiologic monitoring system for space and terrestrial applications. IEEE Trans. Inf. Technol. Biomed. 2005, 9, 382–391. [Google Scholar] [CrossRef]
- Board, S.S.; Council, N.R. A Risk Reduction Strategy for Human Exploration of Space: A Review of NASA’s Bioastronautics Roadmap; National Academies Press: Washington, DC, USA, 2006. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Derived Metrics | Equation | Equation Number |
|---|---|---|---|---|
| Fixation | The state of a gaze that is focused (fixated) on an object. | Fixation (duration, frequency, count) | (1) | |
| Time to first fixation | (2) | |||
| Saccade | Small, rapid, involuntary eye movements between fixations, usually lasting 30 to 80 ms. | Saccadic length/amplitude, frequency | with and | (3) |
| Saccade velocity (mean/peak) | (4) | |||
| Explore/exploit ratio (REE) | (5) | |||
| Dwell | Eye movements comprising a series of fixation-saccade-fixation movements, usually with reference to (or within) a given area of interest. | Dwell count | (6) | |
| Dispersion [17] | (7) | |||
| Transition | The change of dwell from one area of interest to another and is usually represented in the form of a matrix. | One-/two-way transition probability Transition frequency | e.g., | (8) |
| Scan path | The series of eye movements in accomplishing a specified task. A scan path can include elements of fixations, saccades, dwells and transitions. | Visual entropy [10] | (9) | |
| Nearest Neighbour Index (NNI) [12] | , where | (10) | ||
| Pupillo-metry | Measures of pupil size and reactivity. | Pupil dilation spectral power | (11) | |
| Blink | Measures of partial or full eye closure. | Blink rate (BLR) | (12) | |
| Percentage closure [18,19,20,21] | (13) |
| Variable | Mental Workload | Attention | Fatigue |
|---|---|---|---|
| Fixation | ↑ | ↑ | ↑ |
| Blink rate | ↑ | ↓ | ↑ |
| Saccades | ↓ | ↓ | - |
| Pupil diameter | ↑ | ↑ | ↓ |
| Visual entropy | ↓ | ↑ | - |
| Dwell time | ↓ | ↑ | - |
| Parameter (Unit) | Description | Equation | Equation Number |
|---|---|---|---|
| SDRR (ms) | Standard deviation of RR intervals | (15) | |
| SDNN (ms) | Standard deviation of NN intervals | (16) | |
| pNN50 (%) | Percentage of successive NN intervals that differ by more than 50 ms | (17) | |
| RMSSD (ms) | Root mean square of successive RR interval differences | (18) |
| Parameter (Unit) | Description | Equation | Equation Number |
|---|---|---|---|
| ULF power (ms2) | Absolute power of the ultra-low-frequency band (≤0.003 Hz) | (19) | |
| VLF power (ms2) | Absolute power of the very-low-frequency band (0.003–0.04 Hz) | (20) | |
| LF power (ms2) | Absolute power of the low-frequency band (0.04–0.15 Hz) | (21) | |
| LF power (%) | Relative power of the low-frequency band | (22) | |
| HF power (ms2) | Absolute power of the high-frequency band (0.15–0.4 Hz) | (23) | |
| HF power (%) | Relative power of the high-frequency band | (24) | |
| LF/HF (%) | Ratio of LF-to-HF power | (25) |
| Variables (Unit) | Description | Equation | Equation Number |
|---|---|---|---|
| BR (1/min) | Number of breaths per minute. | (29) | |
| TV (mL) | Amount of air inspired in one respiratory cycle | (30) | |
| MV (L/min) | Amount of air inhaled within one minute | (31) |
| Variable | Mental Workload | Attention | Fatigue |
|---|---|---|---|
| HR | ↑ | ↑ | ↑ |
| SDNN | ↓ | ↑ | ↑ |
| SDRR | ↓ | ↑ | ↑ |
| RMSSD | ↑ | ↑ | ↓ |
| pNN50 | ↓ | - | ↓ |
| LF | ↑ | - | - |
| HF | ↓ | - | - |
| LF/HF | ↑ | - | ↓ |
| Poincare axes | ↓ | - | - |
| BR | ↓ | ↓ | ↓ |
| TV | - | - | ↓ |
| MV | - | - | ↓ |
| Category | Electrical Response | Hemodynamic Response |
|---|---|---|
| Temporal resolution | High (limited by sampling frequency) [42,43] | Limited (limited by sampling frequency) [44,45] |
| Temporal sensitivity | High (limited by sampling frequency) [42,43] | Limited (limited by the hemodynamic response of the brain) [46,47] |
| Spatial sensitivity | Limited (depends on no. of electrodes) [42,48] | High (fNIRS) [45] |
| Sensitive to movement | Sensitive to eye, head, body and etc. movement. Noise filtering algorithms are required. | Might need to filter out heart activity from the raw measurements. |
| Intrusiveness | More intrusive [42] | Low |
| Mental Workload | Engagement/Attention/ Vigilance | Working Memory | Fatigue | |
|---|---|---|---|---|
| EEG | Spectral ratio [51,52,53] Spectral bands [54,55,56,57,58,59,60] Regression [61] Bayesian modelling [53] Neural networks [62,63,64,65,66,67] Multivariate analysis [68,69,70] Discriminant analysis [66,71,72,73,74,75,76] | Spectral ratio [77,78,79] Spectral bands [52,56,80,81] Committee machines [82,83,84] Discriminant analysis [75,85] | - | Multivariate analysis [69] Discriminant analysis [75] |
| fNIRS | oxy-hemoglobin (HbO), deoxy-hemoglobin (HbR) [86,87,88,89,90,91,92,93,94] | Oxygenation wave size [91,95,96] | HbO, HbR [97,98,99] | HbO, HbR [100] |
| Subject | Physical Testing | Mental Testing | ||
|---|---|---|---|---|
| RMS Error | CC | RMS Error | CC | |
| 1 | 0.0953 | 0.9153 | 0.0345 | 0.7878 |
| 2 | 0.0276 | 0.8839 | 0.0148 | 0.8997 |
| 3 | 0.1386 | 0.6312 | 0.1113 | 0.7008 |
| HR (L/min) | BR (L/min) | |
|---|---|---|
| Low | 63.2 | 11.5 |
| Medium | 64.9 | 14.6 |
| High | 68.3 | 15.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pongsakornsathien, N.; Lim, Y.; Gardi, A.; Hilton, S.; Planke, L.; Sabatini, R.; Kistan, T.; Ezer, N. Sensor Networks for Aerospace Human-Machine Systems. Sensors 2019, 19, 3465. https://doi.org/10.3390/s19163465
Pongsakornsathien N, Lim Y, Gardi A, Hilton S, Planke L, Sabatini R, Kistan T, Ezer N. Sensor Networks for Aerospace Human-Machine Systems. Sensors. 2019; 19(16):3465. https://doi.org/10.3390/s19163465
Chicago/Turabian StylePongsakornsathien, Nichakorn, Yixiang Lim, Alessandro Gardi, Samuel Hilton, Lars Planke, Roberto Sabatini, Trevor Kistan, and Neta Ezer. 2019. "Sensor Networks for Aerospace Human-Machine Systems" Sensors 19, no. 16: 3465. https://doi.org/10.3390/s19163465
APA StylePongsakornsathien, N., Lim, Y., Gardi, A., Hilton, S., Planke, L., Sabatini, R., Kistan, T., & Ezer, N. (2019). Sensor Networks for Aerospace Human-Machine Systems. Sensors, 19(16), 3465. https://doi.org/10.3390/s19163465