Sensorless Control of the Permanent Magnet Synchronous Motor



Abstract
:1. Introduction
2. Sensorless Control
2.1. Estimation Vector
2.2. Mathematical Model of PMSM
3. The Kalman Filter Sensorless Control
Unscented Kalman Filter
4. Control Structure for Low-Speed Range Using the Reference Model
4.1. Position Observer
4.2. Modified Control Structure
- Adder for the reference speed modifier
- Reference model of the drive
- Reference modifying speed gain
- Rotator
- Inverse Clarke transformation unit
- Inverter unit
- Transformer
- Current sensors
- Controlled motor
- Clarke transformation unit
- Park transformation unit
- Position observer
- Current corrector
- Adder for the correction circuit for current
- Load estimator
- Adder for the load estimator
- Rate limiter
5. Results
5.1. Unscented Kalman Filter
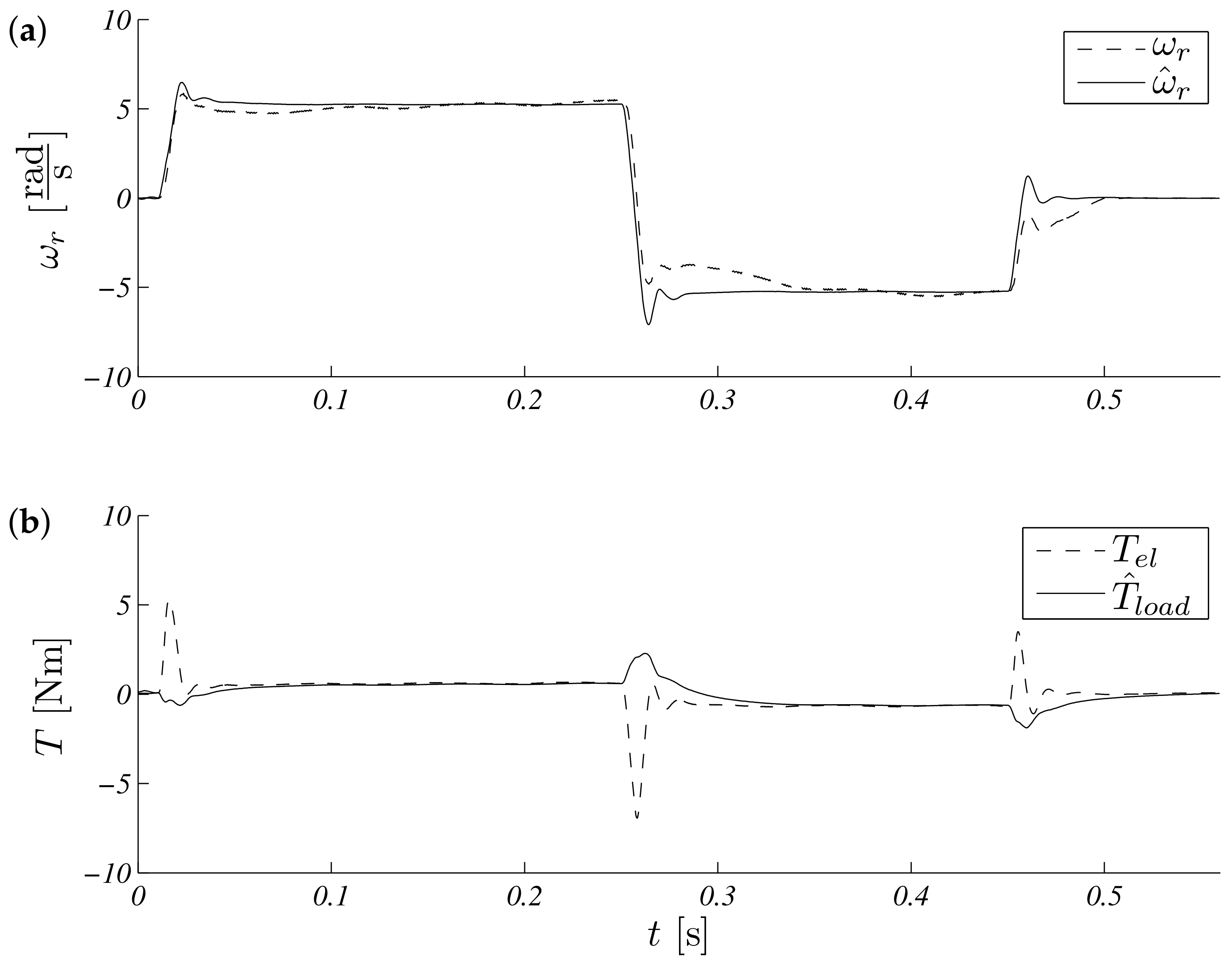
5.1.1. Speed Control
5.1.2. Load Torque
5.2. Low-Speed Structure Using the Reference Model
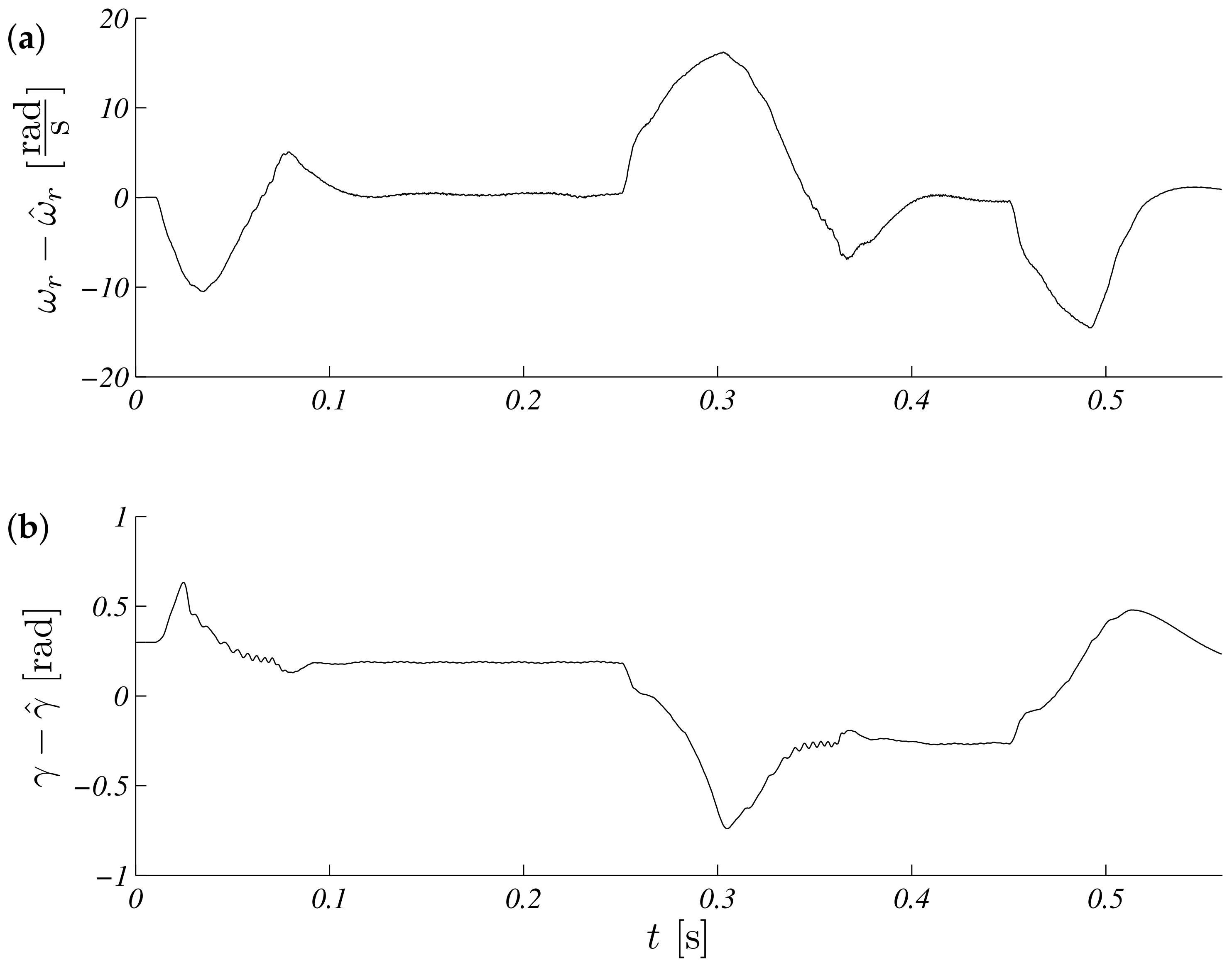
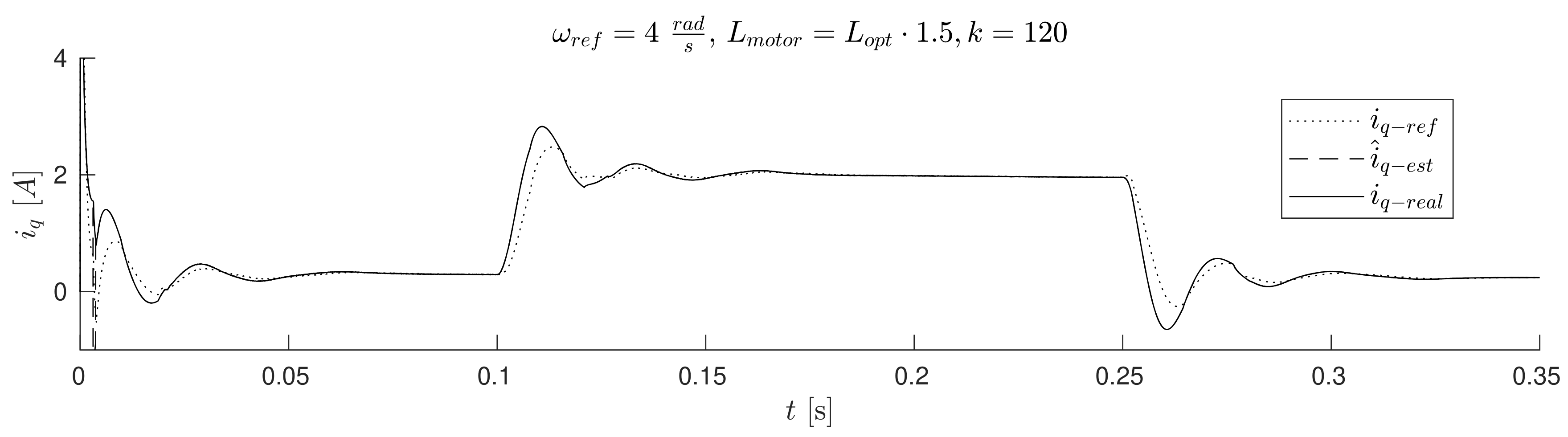
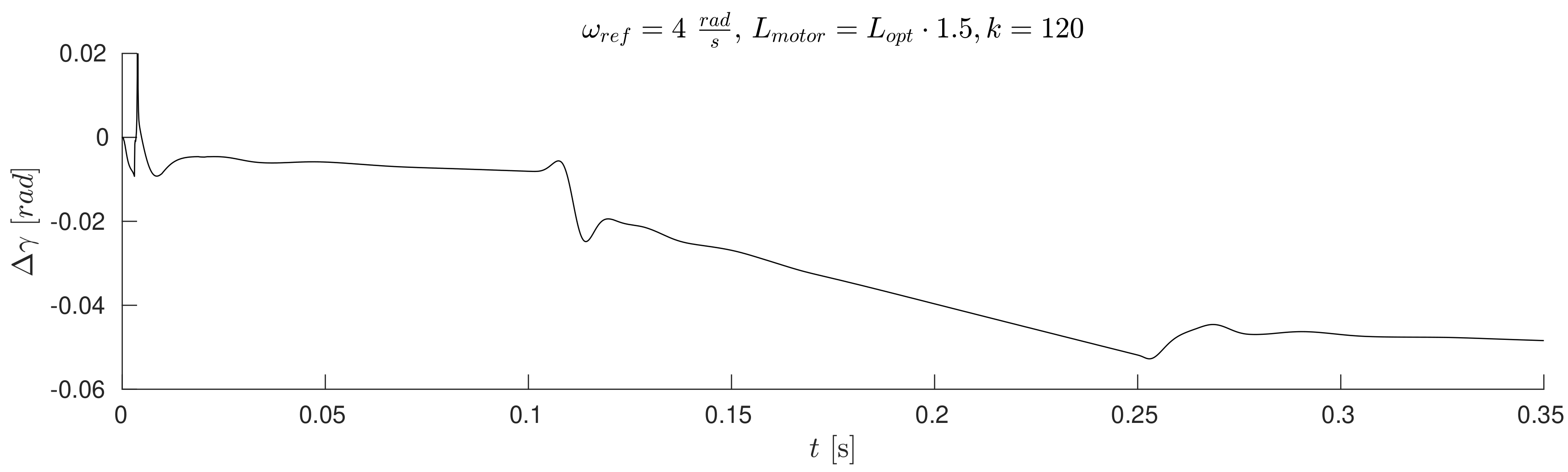
5.2.1. Simulations Research








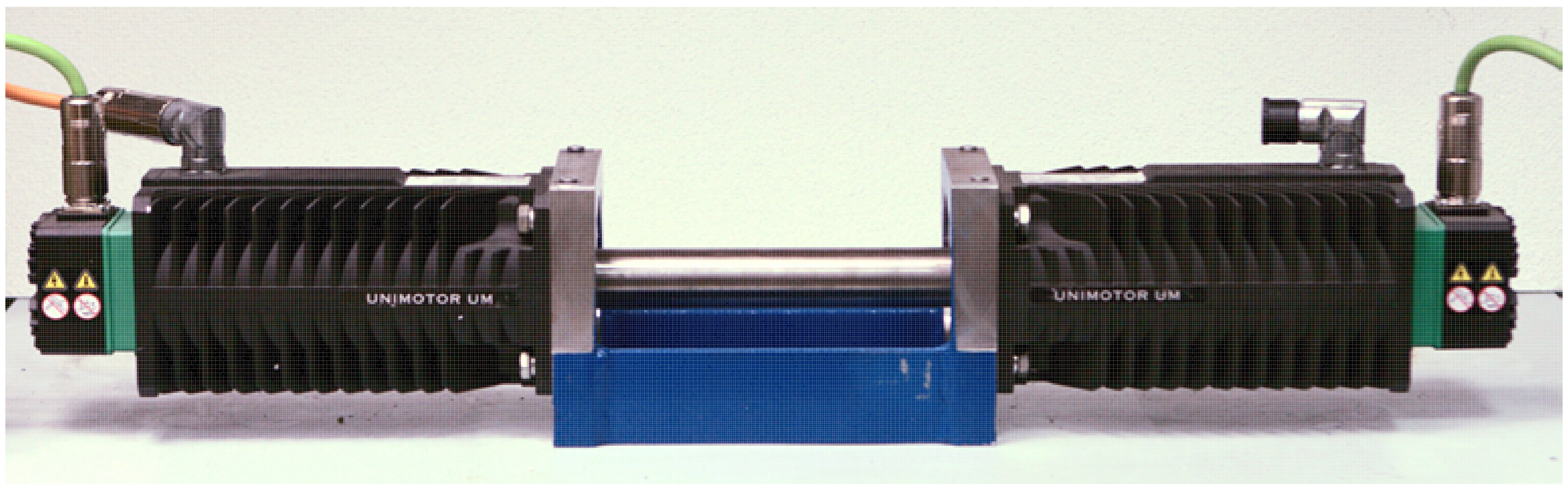
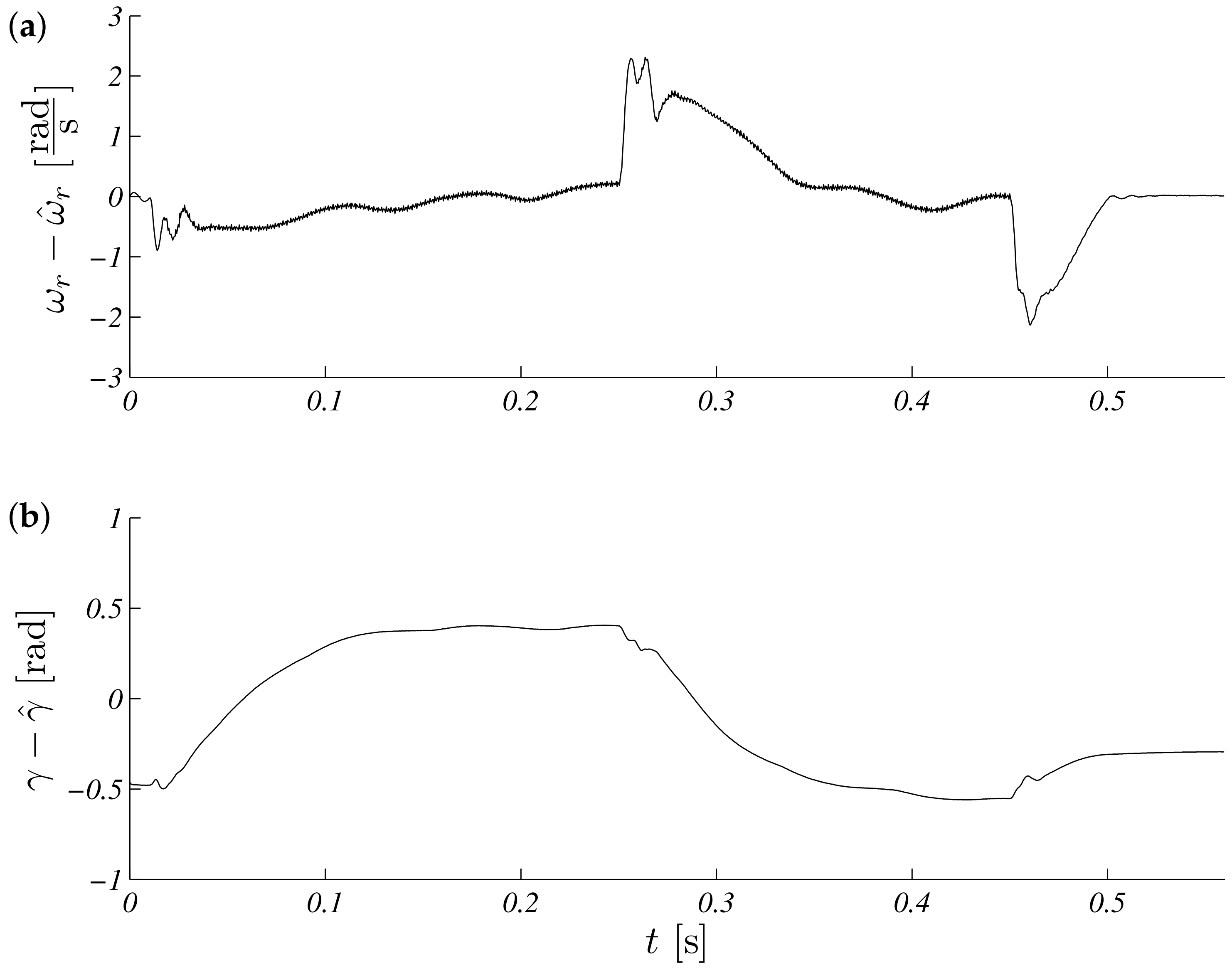
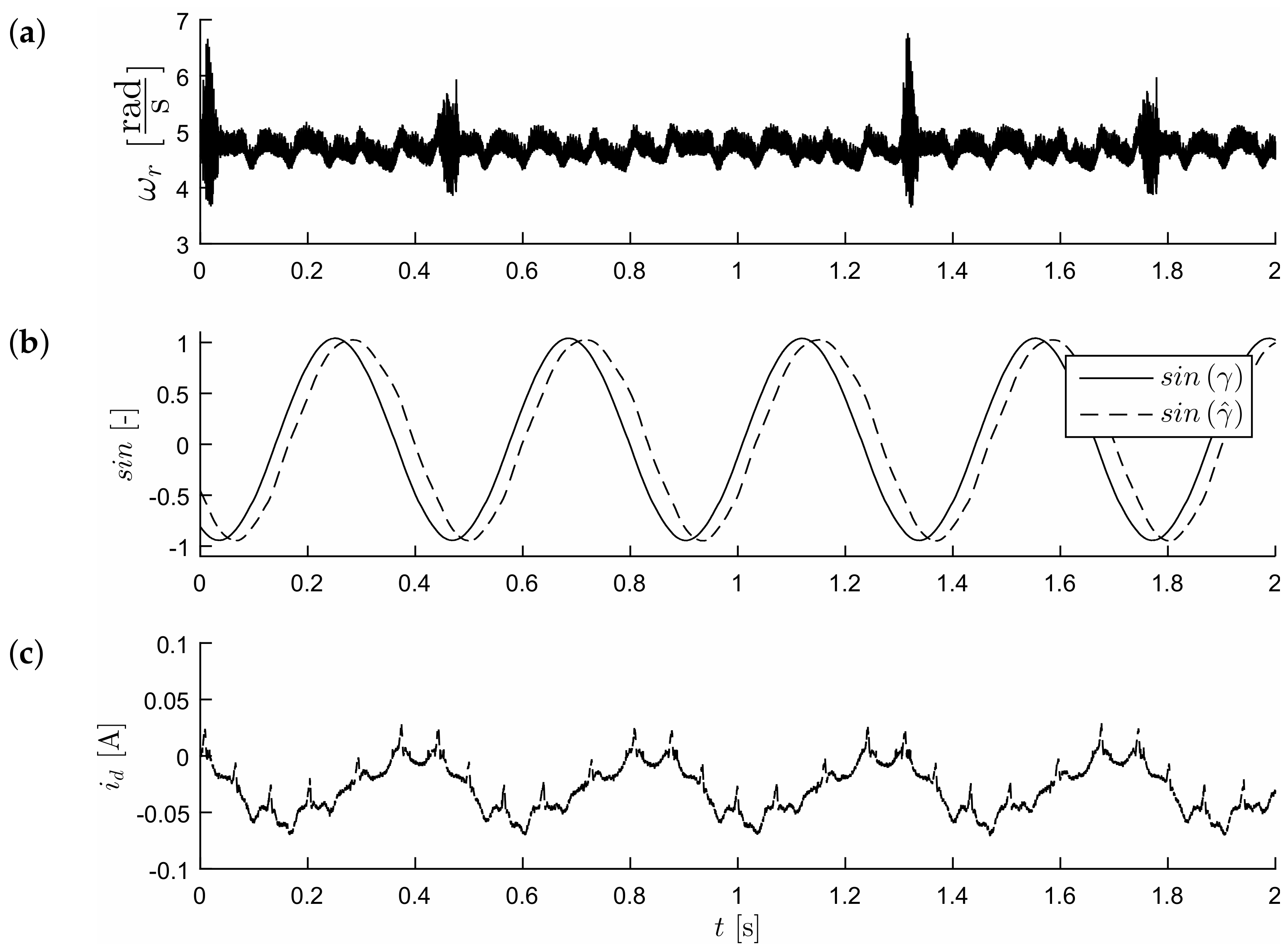
5.2.2. Experimental Research
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Units | Value |
|---|---|---|
| P | kW | 1.23 |
| Nm | 3.9 | |
| 1.15 | ||
| mH | 6.8 | |
| mH | 6.8 | |
| Wb | 0.254 |
References
- Vas, P. Vector Control of AC Machines; Monographs in Electrical and Electronic Engineering; Oxford University Press: New York, NY, USA, 1990. [Google Scholar]
- Vas, P. Sensorless Vector and Direct Torque Control; Monographs in Electrical and Electronic Engineering Number 42; Oxford University Press: New York, NY, USA, 1998. [Google Scholar]
- Dhaouadi, R.; Mohan, N.; Norum, L. Design and implementation of an extended Kalman filter for the state estimation of a permanent magnet synchronous motor. IEEE Trans. Power Electron. 1991, 6, 491–497. [Google Scholar] [CrossRef]
- Grzesiak, L.; Kazmierkowski, M. Improving flux and speed estimators for sensorless AC drives. IEEE Ind. Electron. Mag. 2007, 1, 8–19. [Google Scholar] [CrossRef]
- Janiszewski, D. Unscented Kalman Filter for sensorless PMSM drive with output filter fed by PWM converter. In Proceedings of the IECON 2012—38th Annual Conf. IEEE Industrial Electronics Society, Monteral, QC, Canada, 25–28 October 2012; pp. 4660–4665. [Google Scholar] [CrossRef]
- Comanescu, M. Rotor position estimation of PMSM by Sliding Mode EMF observer under improper speed. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 1474–1478. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New Sliding Mode Observer for Position Sensorless Control of Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2012, 60, 710–719. [Google Scholar] [CrossRef]
- Briz, F.; Degner, M.W. Rotor Position Estimation. IEEE Ind. Electron. Mag. 2011, 5, 24–36. [Google Scholar] [CrossRef]
- Qu, B.; Lin, H. Chapter Design of Sensorless Permanent Magnet Synchronous Motor Control System. In Electronics and Signal Processing: Selected Papers from the 2011 International Conference on Electric and Electronics (EEIC 2011) in Nanchang, China on 20–22 June 2011; Springer: Berlin/Heidelberg, Germany, 2011; Volume 1, pp. 533–539. [Google Scholar] [CrossRef]
- Hrbáč, Z.; Sova, V.; Grepl, R. Chapter Sensorless Speed Control of BLDC Motor using EKF with Computed Inputs and Disturbance. In Advanced Mechatronics Solutions; Springer International Publishing: Cham, Switzerland, 2016; pp. 45–50. [Google Scholar] [CrossRef]
- Urbanski, K.; Zawirski, K. Improved Method for Position Estimation Using a Two-Dimensional Scheduling Array. Autom. J. Control Meas. Electron. Comput. Commun. 2015, 53, 331–340. [Google Scholar] [CrossRef]
- Janiszewski, D. Load torque estimation in sensorless PMSM drive using Unscented Kalman Filter. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 643–648. [Google Scholar] [CrossRef]
- Zhu, G.; Dessaint, L.A.; Akhrif, O.; Kaddouri, A. Speed tracking control of a permanent-magnet synchronous motor with state and load torque observer. IEEE Trans. Ind. Electron. 2000, 47, 346–355. [Google Scholar] [CrossRef]
- Urbanski, K. Sensorless control of PMSM high dynamic drive at low speed range. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 728–732. [Google Scholar] [CrossRef]
- Jarzebowicz, L.; Karwowski, K.; Kulesza, W.J. Sensorless algorithm for sustaining controllability of IPMSM drive in electric vehicle after resolver fault. Control Eng. Pract. 2017, 58, 117–126. [Google Scholar] [CrossRef]
- Yuan, Q.; Yang, Z.; Cui, L.; Hu, T.; Lin, F. Chapter A Position Estimation Method Based on Modified Integrator of PMSM Sensorless Control forHigh-Speed Vehicles. In Proceedings of the 1st International Workshop on High-Speed and Intercity Railways; Springer: Berlin/Heidelberg, Germany, 2012; Volume 2, pp. 9–18. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Urbanski, K. Estimation of Back EMF for PMSM at Low Speed Range. MM Modern Mach. Sci. J. 2015, 564–569. [Google Scholar] [CrossRef]
- Nagarajan, V.S.; Balaji, M.; Kamaraj, V. Chapter Back-Emf-Based Sensorless Field-Oriented Control of PMSM Using Neural-Network-Based Controller with a Start-Up Strategy. In Artificial Intelligence and Evolutionary Algorithms in Engineering Systems: Proceedings of ICAEES 2014; Springer: New Delhi, India, 2015; Volume 2, pp. 449–457. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, H. Sensorless speed control including zero speed of non salient PM synchronous drives. Bull. Pol. Acad. Sci. Tech. Sci. 2006, 54, 293–298. [Google Scholar]
- Wisniewski, J.; Koczara, W. The sensorless rotor position identification and low speed operation of the axial flux permanent magnet motor controlled by the novel PIPCRM method. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 1502–1507. [Google Scholar] [CrossRef]
- Yan, T.; Liu, J.; Zhang, H. Chapter Sensorless Vector Control of PMSM in Wide Speed Range. In Computational Intelligence, Networked Systems and Their Applications: International Conference of Life System Modeling and Simulation, LSMS 2014 and International Conference on Intelligent Computing for Sustainable Energy and Environment, ICSEE 2014, Shanghai, China, 20–23 September 2014, Proceedings, Part II; Springer: Berlin/Heidelberg, Germany, 2014; pp. 363–369. [Google Scholar] [CrossRef]
- Urbanski, K. Sensorless control of PMSM fed through the sinusoidal filter. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Janiszewski, D.; Kielczewski, M. Kalman filter sensor fusion for multi-head position encoder. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. P.1–P.7. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, Q.; Ye, Y.; Lu, K.; Fang, Y. Investigation of PMSM Back-EMF using Sensorless Control with Parameter Variations and Measurement Errors. Przeglad Elektrotechniczny 2012, 88, 182–186. [Google Scholar]
- Flieh, H.; Slininger, T.; Lorenz, R.D.; Totoki, E. Self-Sensing via Flux Injection with Servo Dynamics including a Smooth Transition to Back-EMF Tracking. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 1762–1769. [Google Scholar] [CrossRef]
- Kazmierkowski, M.; Franquelo, L.; Rodriguez, J.; Perez, M.; Leon, J. High-Performance Motor Drives. IEEE Ind. Electron. Mag. 2011, 5, 6–26. [Google Scholar] [CrossRef] [Green Version]
- Janiszewski, D. Load torque estimation for sensorless PMSM drive with output filter fed by PWM converter. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 2953–2959. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.; Trzynadlowski, A. A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives. IEEE Trans. Power Electron. 2003, 18, 1390–1396. [Google Scholar] [CrossRef]
- Krishnan, R.; Irwin, J.D.; Kazmierkowski, M.P.; Blaabjerg, F. Control in Power Electronics: Selected Problems; Academic Press Series in Engineering; Academic Press: Burlington, MA, USA, 2002. [Google Scholar] [CrossRef]
- Brock, S. Chapter Robust Integral Sliding Mode Tracking Control of a Servo Drives with Reference Trajectory Generator. In Analysis and Simulation of Electrical and Computer Systems; Springer International Publishing: Cham, Switzerland, 2015; pp. 305–313. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Tunia, H. Automatic Control of Converter-Fed Drives; Elsevier Science & Technology: Amsterdam, The Netherlands, 1994. [Google Scholar]
- De Angelo, C.; Bossio, G.; Solsona, J.; Garcia, G.; Valla, M. Mechanical sensorless speed control of permanent-magnet AC motors driving an unknown load. IEEE Trans. Ind. Electron. 2006, 53, 406–414. [Google Scholar] [CrossRef]
- Szabat, K.; Orlowska-Kowalska, T. Application of the Kalman Filters to the High-Performance Drive System With Elastic Coupling. IEEE Trans. Ind. Electron. 2012, 59, 4226–4235. [Google Scholar] [CrossRef]
- Pillay, P.; Krishnan, R. Modeling, simulation, and analysis of permanent-magnet motor drives. I. The permanent-magnet synchronous motor drive. IEEE Trans. Ind. Appl. 1989, 25, 265–273. [Google Scholar] [CrossRef]
- Simon, D. Using Nonlinear Kalman Filtering to Estimate Signals. Embed. Syst. Design 2006, 19, 38–53. [Google Scholar]
- Simon, D. Kalman Filtering. Embed. Syst. Program. 2001, 14, 72–79. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. A new extension of the Kalman filter to nonlinear systems. In Proceedings of the International Symposium on Aerospace/Defense Sensing, Simulation and Controls, Orlando, FL, USA, 21–25 April 1997; Volume 3, p. 12. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Z.; Li, B. Sensor Fault Detection and System Reconfiguration for DC-DC Boost Converter. Sensors 2018, 18, 1375. [Google Scholar] [CrossRef] [PubMed]
- Dong, X.; Tianmiao, W.; Hongxing, W.; Jingmeng, L. Adaptive model following speed control method of permanent magnet synchronous motor. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 721–725. [Google Scholar] [CrossRef]
- Kang, J.; Zeng, X.; Wu, Y.; Hu, D. Study of position sensorless control of PMSM based on MRAS. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Mustafa, R.; Ibrahim, Z.; Lazi, J.M. Sensorless adaptive speed control for PMSM drives. In Proceedings of the 2010 4th International Power Engineering and Optimization Conference (PEOCO), Shah Alam, Malaysia, 23–24 June 2010; pp. 511–516. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbanski, K.; Janiszewski, D. Sensorless Control of the Permanent Magnet Synchronous Motor. Sensors 2019, 19, 3546. https://doi.org/10.3390/s19163546
Urbanski K, Janiszewski D. Sensorless Control of the Permanent Magnet Synchronous Motor. Sensors. 2019; 19(16):3546. https://doi.org/10.3390/s19163546
Chicago/Turabian StyleUrbanski, Konrad, and Dariusz Janiszewski. 2019. "Sensorless Control of the Permanent Magnet Synchronous Motor" Sensors 19, no. 16: 3546. https://doi.org/10.3390/s19163546
APA StyleUrbanski, K., & Janiszewski, D. (2019). Sensorless Control of the Permanent Magnet Synchronous Motor. Sensors, 19(16), 3546. https://doi.org/10.3390/s19163546