Modeling and Control of a Six Degrees of Freedom Maglev Vibration Isolation System


Abstract
:1. Introduction
2. Modeling
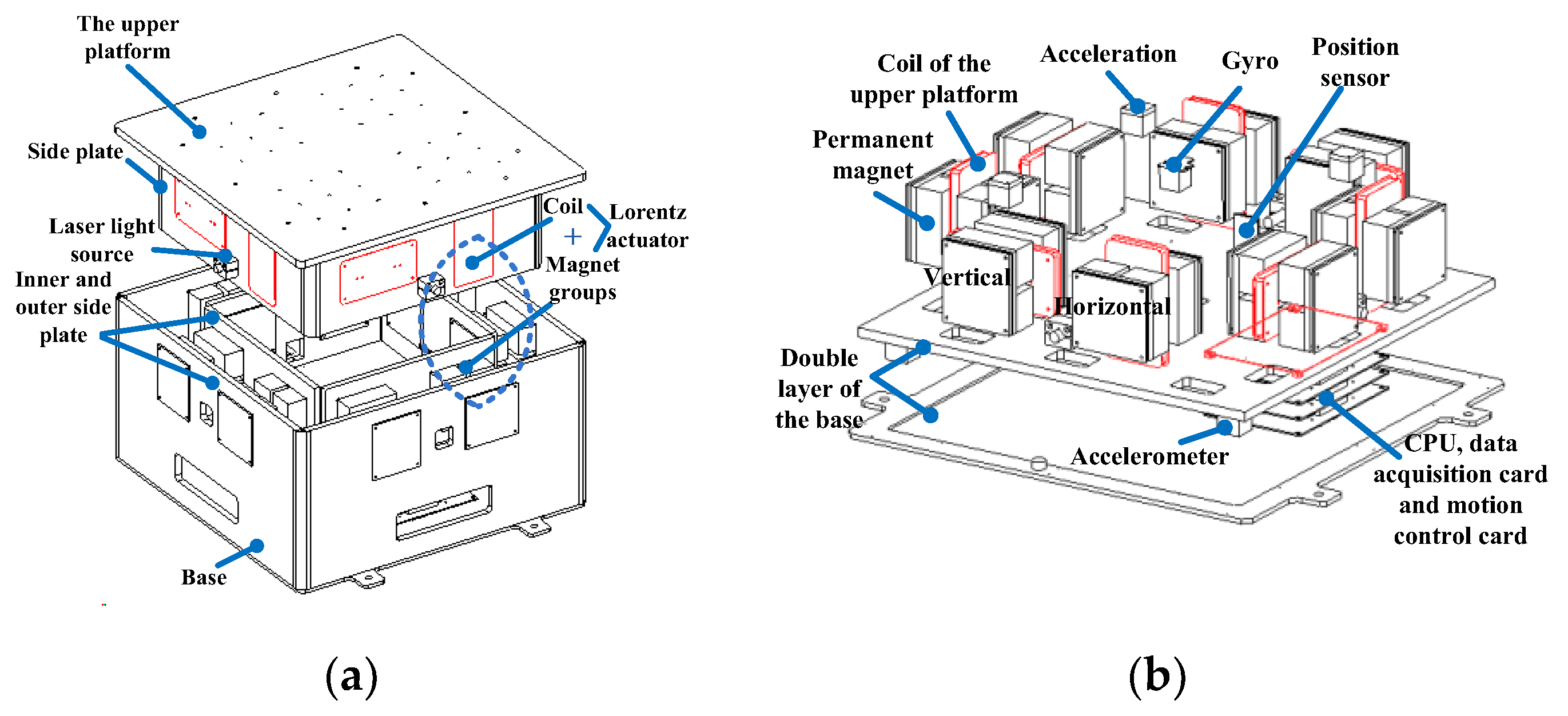
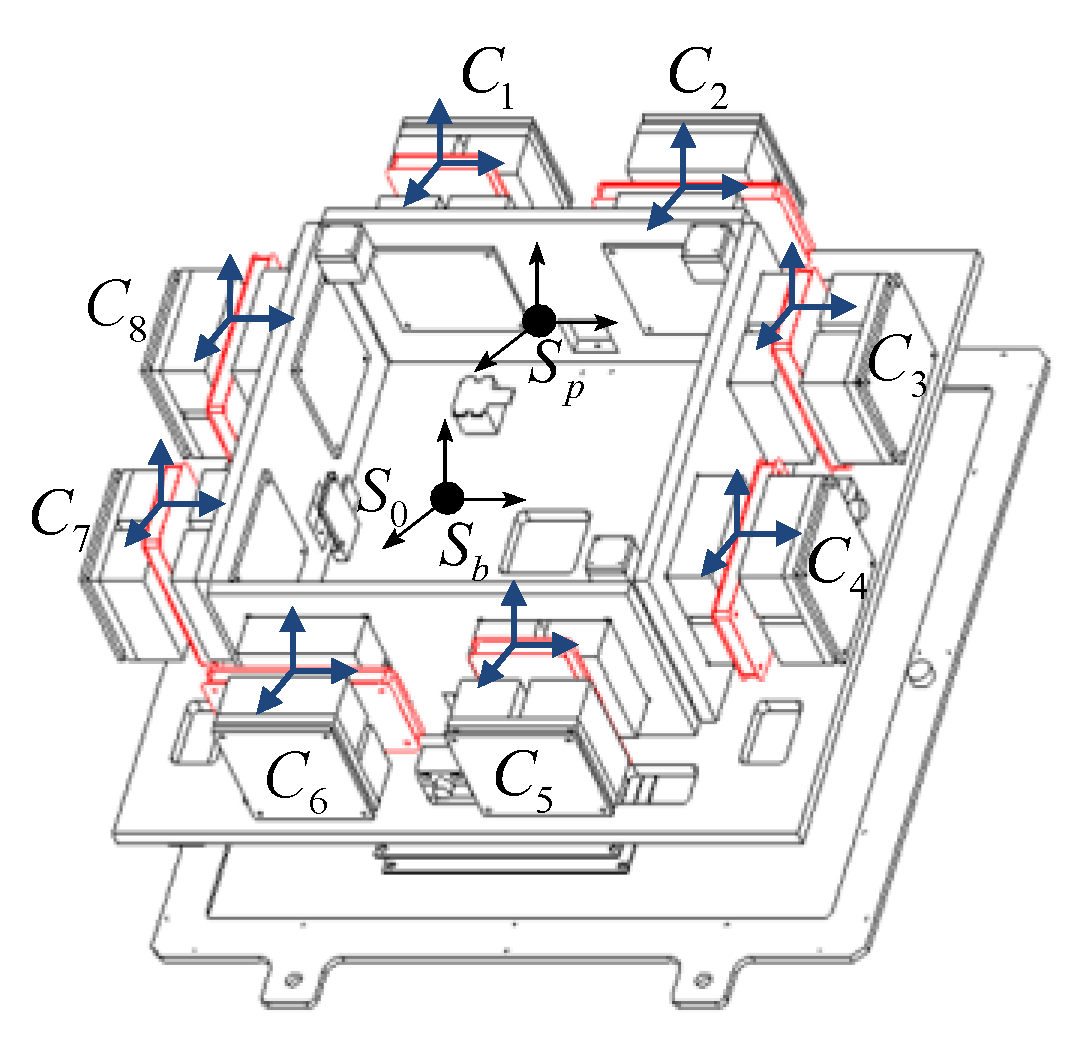
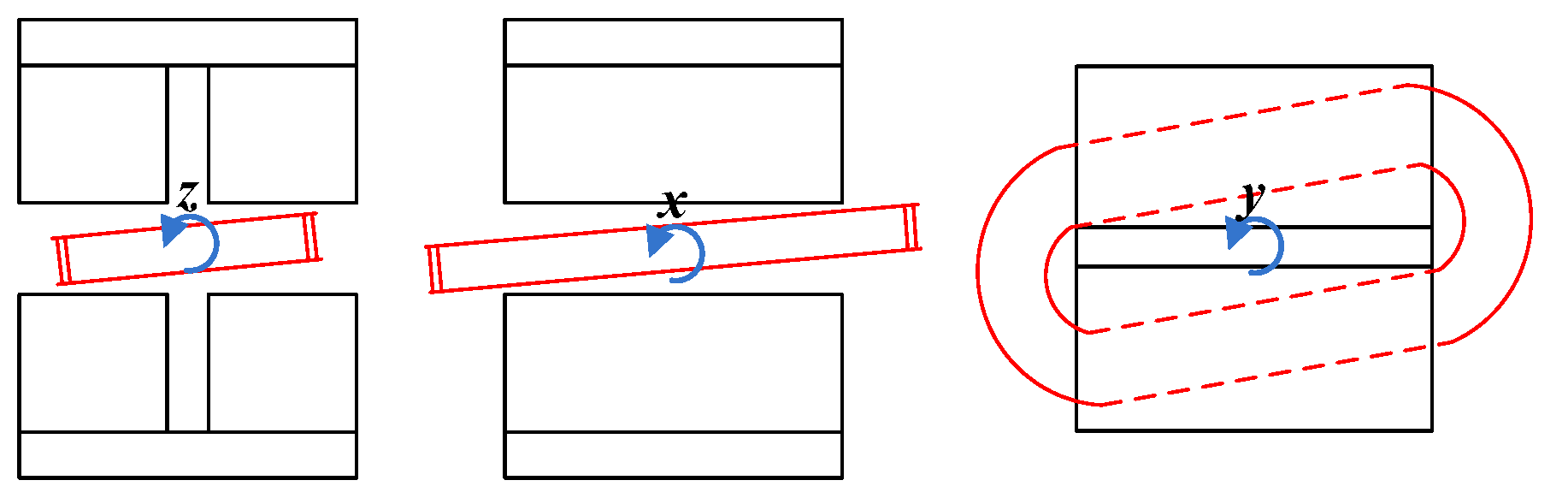
2.1. The Principle of the Maglev Vibration Isolation Platform
2.2. Differential Equation of Motion for the Upper Platform
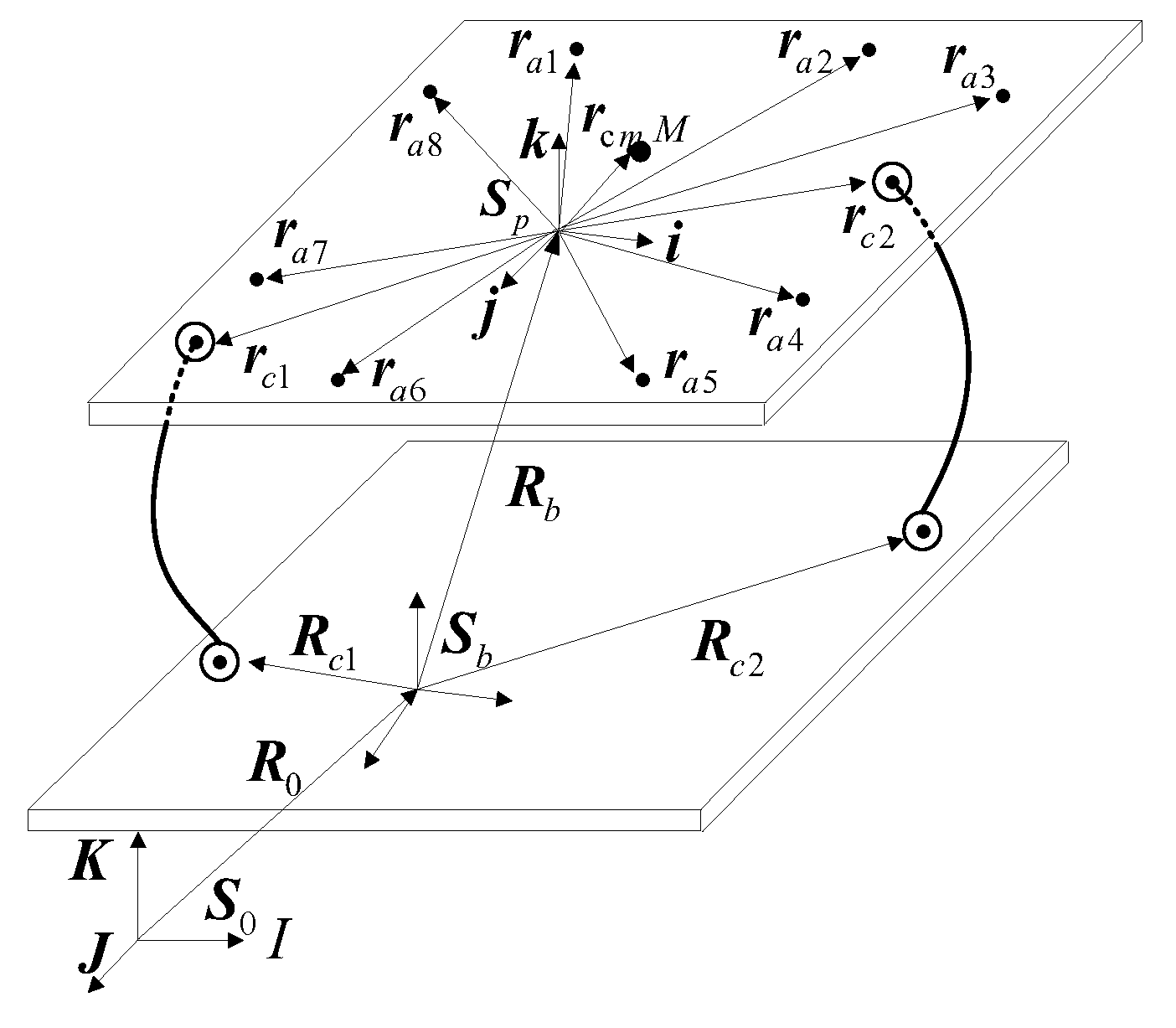
2.2.1. Establishment of Coordinate Systems and Transformation Matrix
2.2.2. Definition and Description of Position Vectors
2.2.3. Translational Equation of Motion and Rotational Equation of Motion
2.2.4. Forces and Moments on the Platform
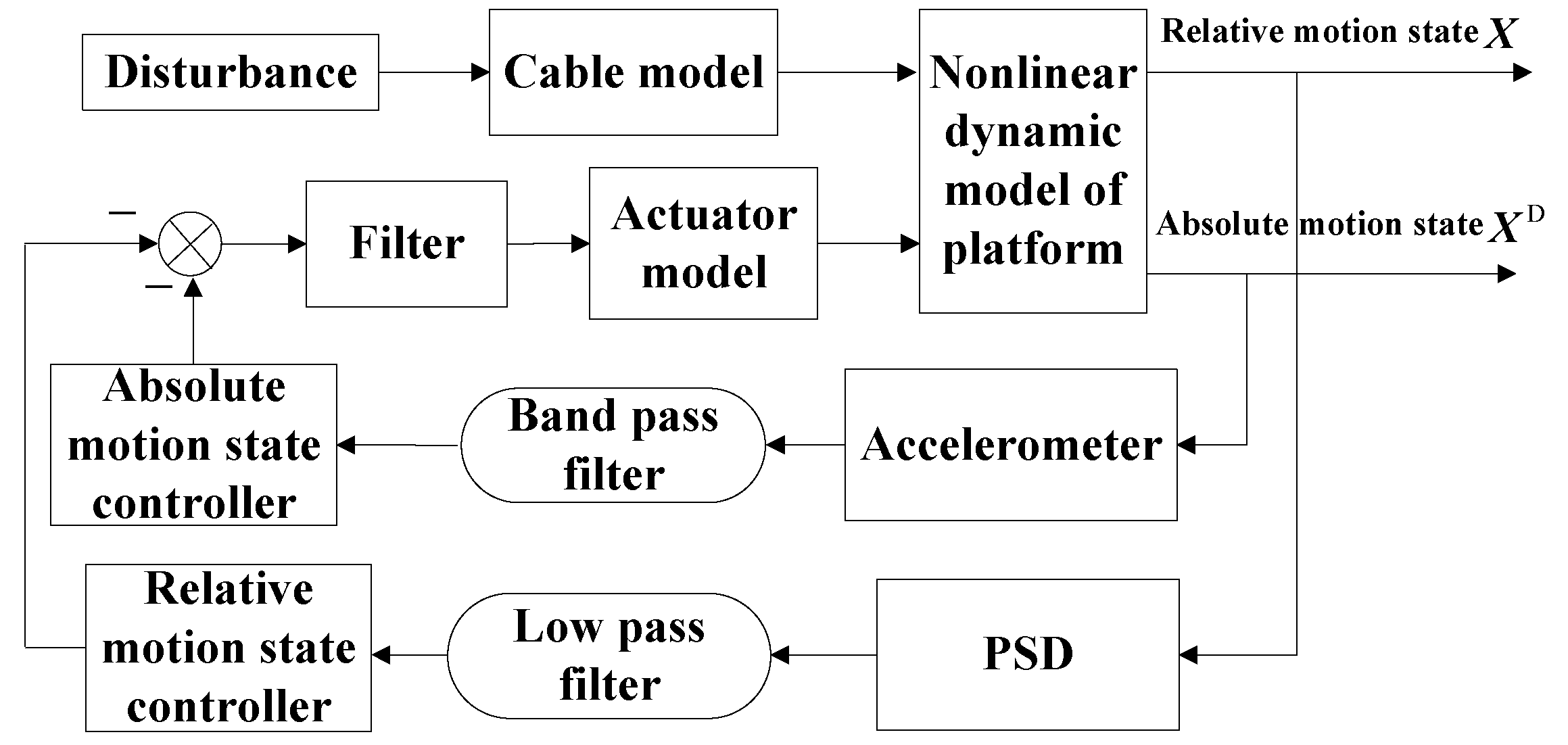
3. Control Strategy for the Maglev Vibration Isolation System
4. Simulation and Analysis
4.1. The Principle of the Maglev Vibration Isolation Platform
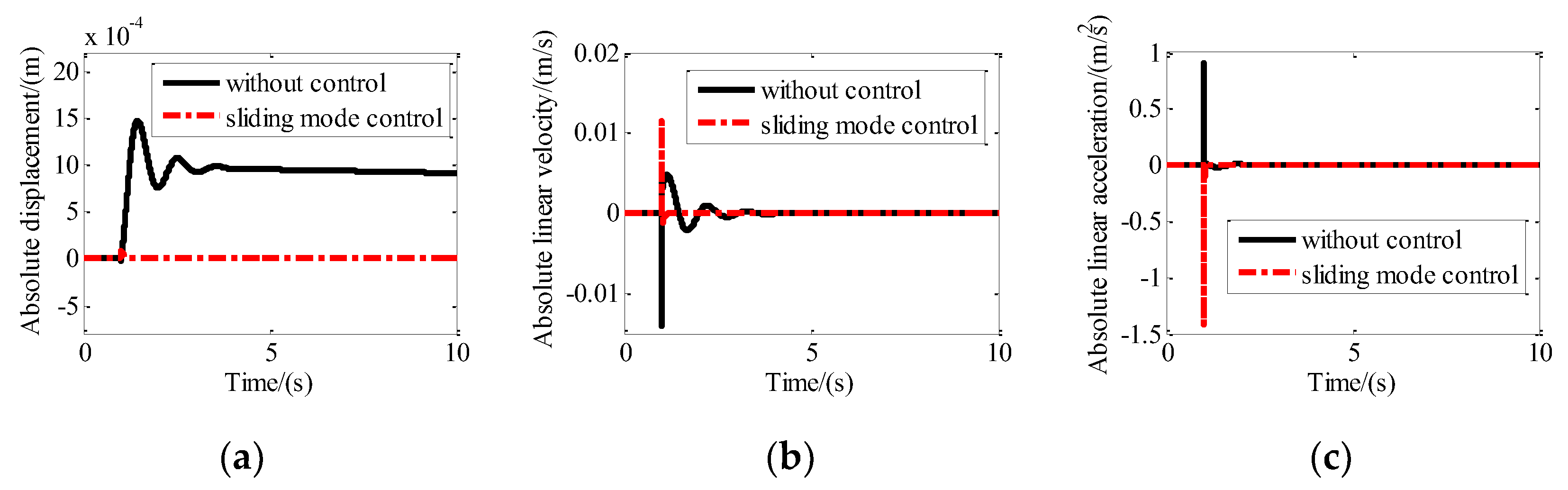
4.2. Vibration Isolation Control Simulation Under Step Disturbance
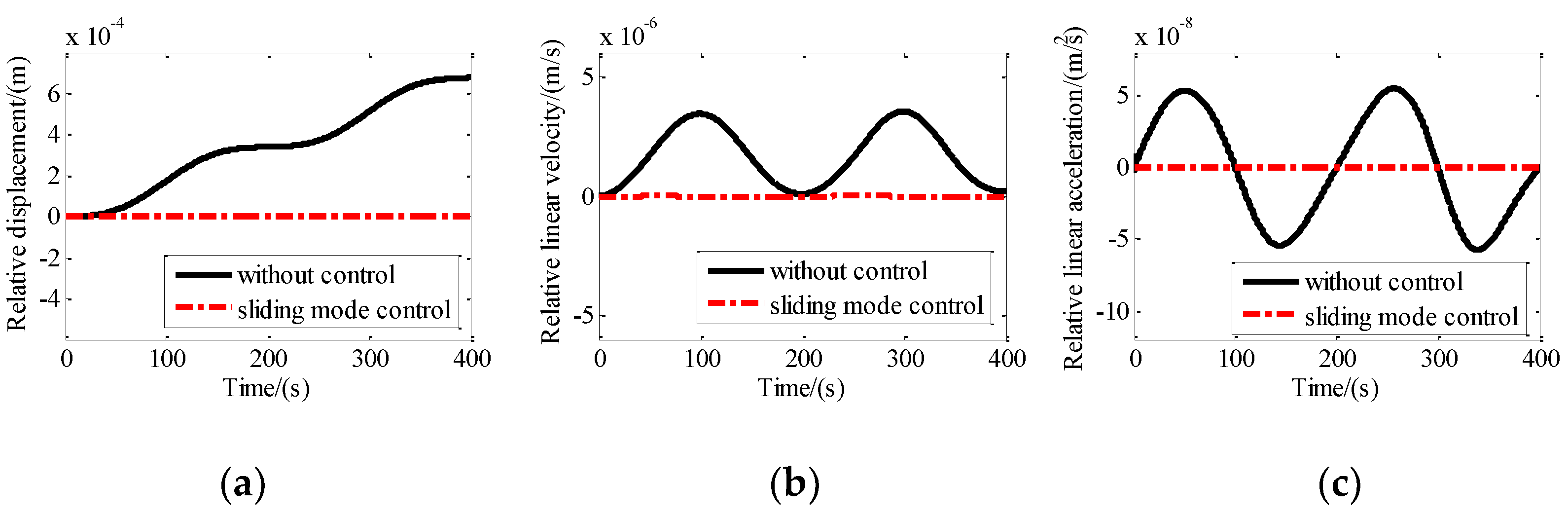
4.3. Tracking Control Simulation Under Sinusodial Disturbance
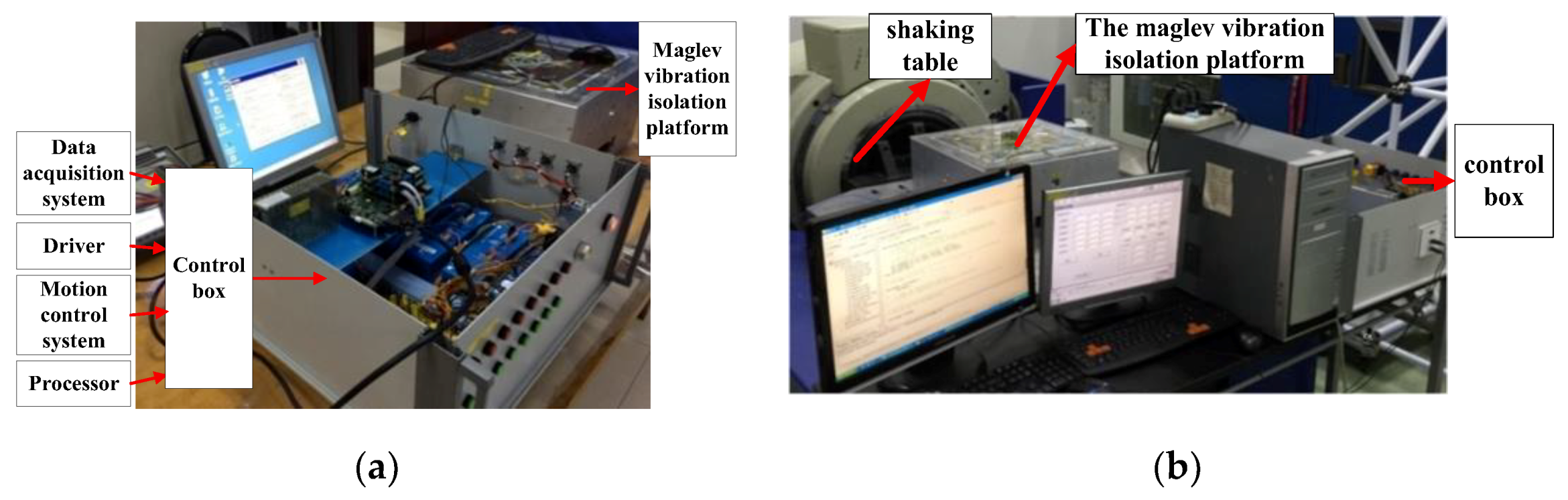
5. Experiments
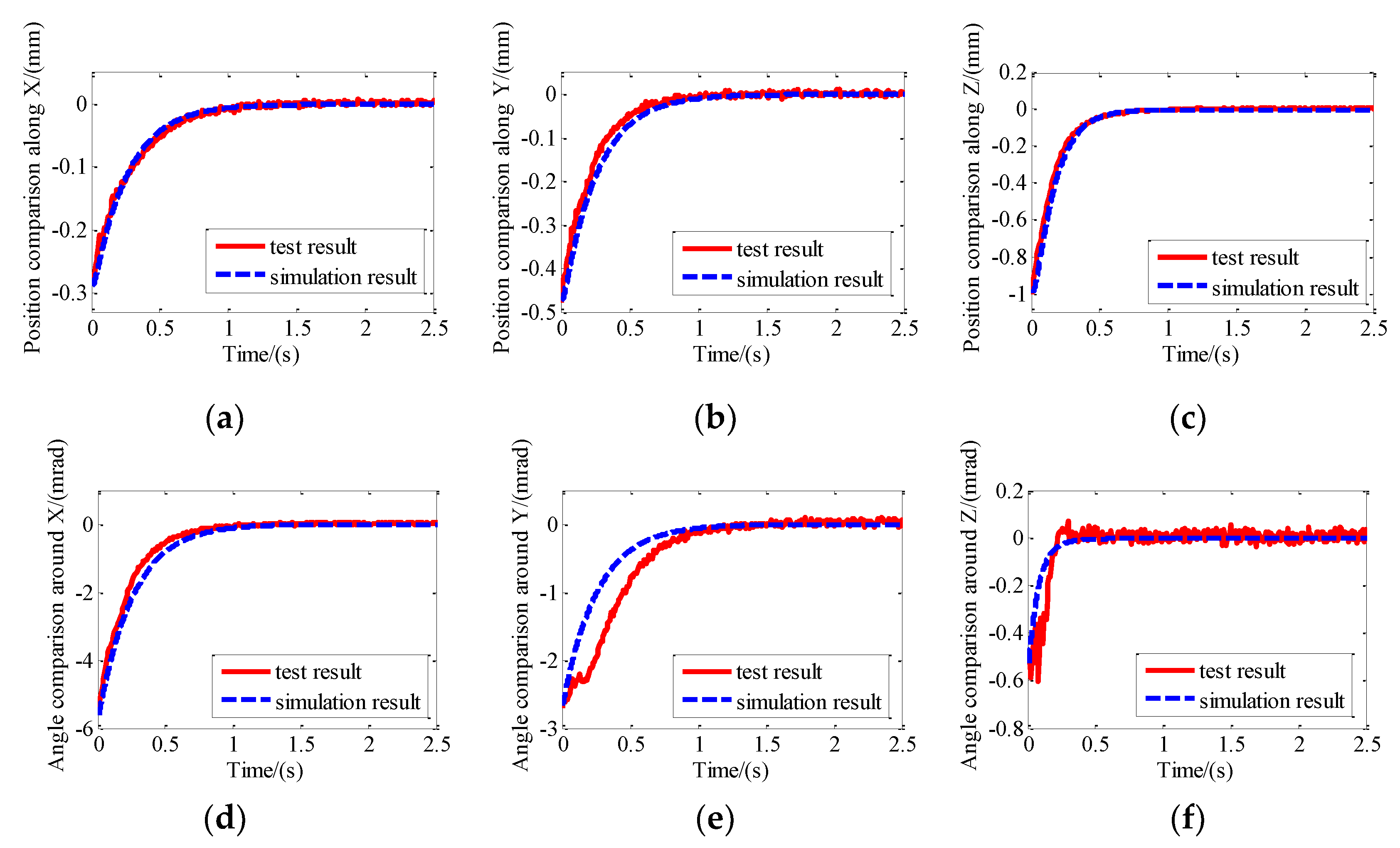
5.1. Verification of the Dynamic Model of the Maglev Vibration Isolation Platform
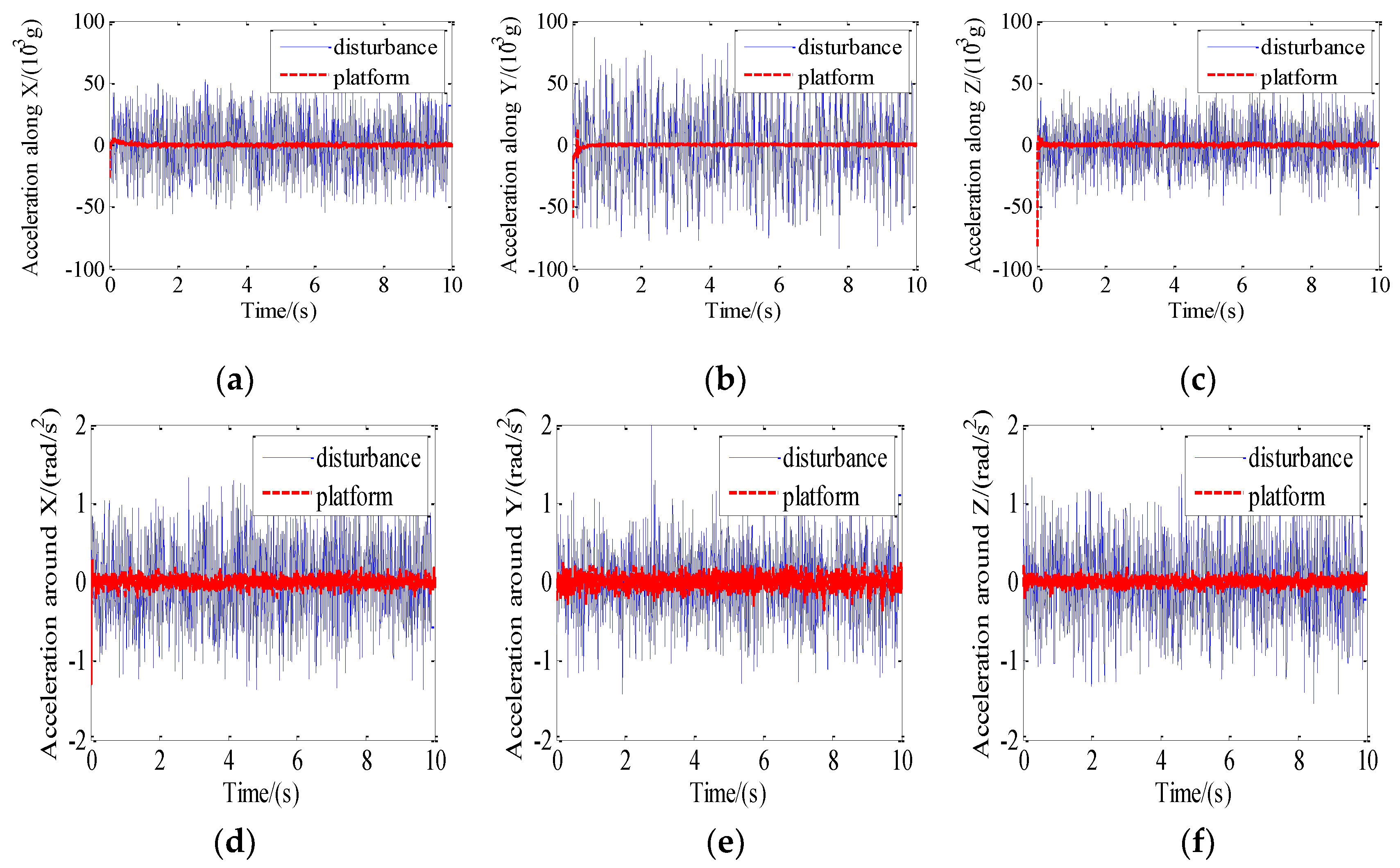
5.2. Vibration Isolation of the Maglev Vibration Isolation Platform
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jia, T.; Chen, S.; Peng, J.; Yong, W. Active disturbance rejection control for microgravity active vibration isolation system in space station. Inf. Control 2017, 46, 304–310. [Google Scholar]
- Sinha, A.; Kao, C.K.; Grodsinsky, C. A new approach to controller design for microgravity isolation systems. Acta Astronaut. 1990, 21, 771–775. [Google Scholar] [CrossRef]
- Wu, Q.; Yue, H.; Liu, R.; Zhang, X.; Ding, L.; Liang, T.; Deng, Z. Measurement model and precision analysis of accelerometers for maglev vibration isolation platforms. Sensors 2015, 15, 20053–20068. [Google Scholar] [CrossRef] [PubMed]
- Bushnell, G.S.; Fialho, I.J.; Allen, J.L.; Quraishi, N. Flight performance of the International Space Station active rack isolation system. J. Acoust. Soc. Am. 2003, 114, 2383–2384. [Google Scholar] [CrossRef]
- Grodsinsky, C.M.; Whorton, M.S. Survey of active vibration isolation systems for microgravity applications. J. Spacecr. Rocket. 2000, 37, 586–596. [Google Scholar] [CrossRef]
- Zhu, W.H.; Tryggvason, B.; Piedboeuf, J.C. On active acceleration control of vibration isolation systems. Control Eng. Pract. 2006, 14, 863–873. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, B.; Cui, N.; Yue, H.; Liu, R. Dynamic analysis of umbilical cables for maglev vibration isolation systems. AIAA J. 2019, 57, 1752–1762. [Google Scholar] [CrossRef]
- Hong, J.; Park, K. Design and control of six degree-of-freedom active vibration isolation table. Rev. Sci. Instrum. 2010, 81, 35106. [Google Scholar] [CrossRef] [PubMed]
- Bock, T.; Jousten, K. Offset scatter reduction of spinning rotor gauges by vibration isolation. Vacuum 2006, 81, 106–113. [Google Scholar] [CrossRef]
- Zhang, T.; Yang, B.T.; Li, H.G.; Meng, G. Dynamic modeling and adaptive vibration control study for giant magnetostrictive actuators. Sens. Actuators A Phys. 2013, 190, 96–105. [Google Scholar] [CrossRef]
- Berardi, U. Modelling and testing of a dielectic electro-active polymer (DEAP) actuator for active vibration control. J. Mech. Sci. Technol. 2013, 27, 1–7. [Google Scholar] [CrossRef]
- Chen, H.Y.; Liang, J.W. Adaptive wavelet neural network controller for active suppression control of a diaphragm-type pneumatic vibration isolator. Int. J. Control Autom. 2017, 15, 1456–1465. [Google Scholar] [CrossRef]
- Preumont, A.; Horodinca, M.; Romanescu, I.; Marneffe, B.D.; Avraam, M.; Deraemaeker, A. A six-axis single-stage active vibration isolator based on Stewart platform. J. Sound Vib. 2007, 300, 644–661. [Google Scholar] [CrossRef]
- Ying, W.; Yu, K.; Jian, J.; Zhao, R. Dynamic modeling and robust nonlinear control of a six-DOF active micro-vibration isolation manipulator with parameter uncertainties. Mech. Mach. Theory 2015, 92, 407–435. [Google Scholar]
- Wang, C.; Xie, X.; Chen, Y.; Zhang, Z. Investigation on active vibration isolation of a Stewart platform with piezoelectric actuators. J. Sound Vib. 2016, 383, 1–19. [Google Scholar] [CrossRef]
- Zhu, T.; Cazzolato, B.; Robertson, W.S.P.; Zander, A. Vibration isolation using six degree-of-freedom quasi-zero stiffness magnetic levitation. J. Sound Vib. 2015, 358, 48–73. [Google Scholar] [CrossRef]
- Kim, M.; Kim, H.; Gweon, D. Design and optimization of voice coil actuator for six degree of freedom active vibration isolation system using Halbach magnet array. Rev. Sci. Instrum. 2012, 83, 105–117. [Google Scholar] [CrossRef] [PubMed]
- Muller, T.; Hurlebaus, S.; Stobener, U.; Gaul, L. Modeling and control of an active vibration isolation. In Proceedings of the International Modal Analysis Conference IMAC, Orlando, FL, USA, 31 January–3 February 2005. [Google Scholar]
- Kerber, F.; Hurlebaus, S.; Beadle, B.M.; Stöbener, U. Control concepts for an active vibration isolation system. Mech. Syst. Signal Process. 2007, 21, 3042–3059. [Google Scholar] [CrossRef]
- Zenga, A.L.Y. Iterative SISO feedback design for an active vibration isolation system. Traineesh. Rep. 2005, 2005, 43. [Google Scholar]
- Hampton, R.; Tryggvason, B.; Decarufel, J.; Townsend, M.A.; Wagar, W.O. The Microgravity Vibration Isolation Mount: A Dynamic Model for Optimal Controller Design; NASA Technical Memorandum 107478; NASA: Washington, DC, USA, 1997.
- Kim, Y.K.; Whorton, M.S. Equations of Motion for the g-LIMIT Microgravity Vibration Isolation System; NASA Technical Memorandum 20010109677; NASA: Washington, DC, USA, 2001.
- Liu, J.; Li, Y.; Zhang, Y.; Gao, Q.; Zuo, B. Dynamics and control of a parallel mechanism for active vibration isolation in space station. Nonlinear Dynam. 2014, 76, 1737–1751. [Google Scholar] [CrossRef]
- Fenn, R.C.; Downer, J.R.; Gondhalekar, V.; Johnson, B.G. An active magnetic suspension for space-based micro-gravity vibration isolation. Act. Noise Vib. Control 1990, 8, 49–56. [Google Scholar]
- Hu, Y.; Chen, C.; Wu, H.; Song, C. Study on structural optimization design and cascade PID control of maglev actuator for active vibration isolation system. J. Vib. Control 2018, 24, 1829–1847. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Shuai, C.G. Nonlinearity of maglev actuator and adaptive vibration control using improved FxLMS algorithm. Appl. Mech. Mater. 2013, 390, 434–439. [Google Scholar] [CrossRef]
- Yang, B.J.; Calise, A.; Craig, J.; Whorton, M. Adaptive Control for a Microgravity Vibration Isolation System; Cambridge University Press: Cambridge, UK, 2013; pp. 1559–1567. [Google Scholar]
- Hampton, R.D.; Knospe, C.; Grodsinsky, C.; Allaire, P.E.; Lewis, D.W. Microgravity Vibration Isolation: Optimal Preview and Feedback Control; NASA Technical Memorandum 105673; NASA: Washington, DC, USA, 1992.
- Xie, L.; Qiu, Z.; Zhang, X. Development of a 3-PRR precision tracking system with full closed-loop measurement and control. Sensors 2019, 19, 1756. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| m/Kg | 16 |
| rc/mm | [10;10;2] |
| ru1/mm | [−133.8;−204.16;38.09] |
| ru2/mm | [133.8;204.16;38.09] |
| rd/mm | [51.48;−49.45;59.31] |
| rF1M/mm | [−77.4;191.29;32.91] |
| rF2M/mm | [80.2;192.29;32.91] |
| Moment of the inertia tensor J/kg mm2 | [3.81e5 −571.84 −659.74; |
| −571.84 3.81e5 −855.16; | |
| −659.74 −855.16 6.89e5] |
| Direction | Peak-Peak Acceleration of Disturbance | Peak-Peak Acceleration of the Platform | Vibration Isolation Ratio |
|---|---|---|---|
| Along X (mg) | 108.16 | 5.49 | 94.92% |
| Along Y (mg) | 159.29 | 5.76 | 96.38% |
| Along Z (mg) | 113.37 | 5.12 | 95.48% |
| Around X (rad/s2) | 2.684 | 0.385 | 85.66% |
| Around Y(rad/s2) | 3.051 | 0.412 | 86.5% |
| Around Z(rad/s2) | 2.906 | 0.368 | 87.34% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Cui, N.; Zhao, S.; Zhang, H.; Liu, B. Modeling and Control of a Six Degrees of Freedom Maglev Vibration Isolation System. Sensors 2019, 19, 3608. https://doi.org/10.3390/s19163608
Wu Q, Cui N, Zhao S, Zhang H, Liu B. Modeling and Control of a Six Degrees of Freedom Maglev Vibration Isolation System. Sensors. 2019; 19(16):3608. https://doi.org/10.3390/s19163608
Chicago/Turabian StyleWu, Qianqian, Ning Cui, Sifang Zhao, Hongbo Zhang, and Bilong Liu. 2019. "Modeling and Control of a Six Degrees of Freedom Maglev Vibration Isolation System" Sensors 19, no. 16: 3608. https://doi.org/10.3390/s19163608
APA StyleWu, Q., Cui, N., Zhao, S., Zhang, H., & Liu, B. (2019). Modeling and Control of a Six Degrees of Freedom Maglev Vibration Isolation System. Sensors, 19(16), 3608. https://doi.org/10.3390/s19163608