Leveraging a Publish/Subscribe Fog System to Provide Collision Warnings in Vehicular Networks †

 ,
,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
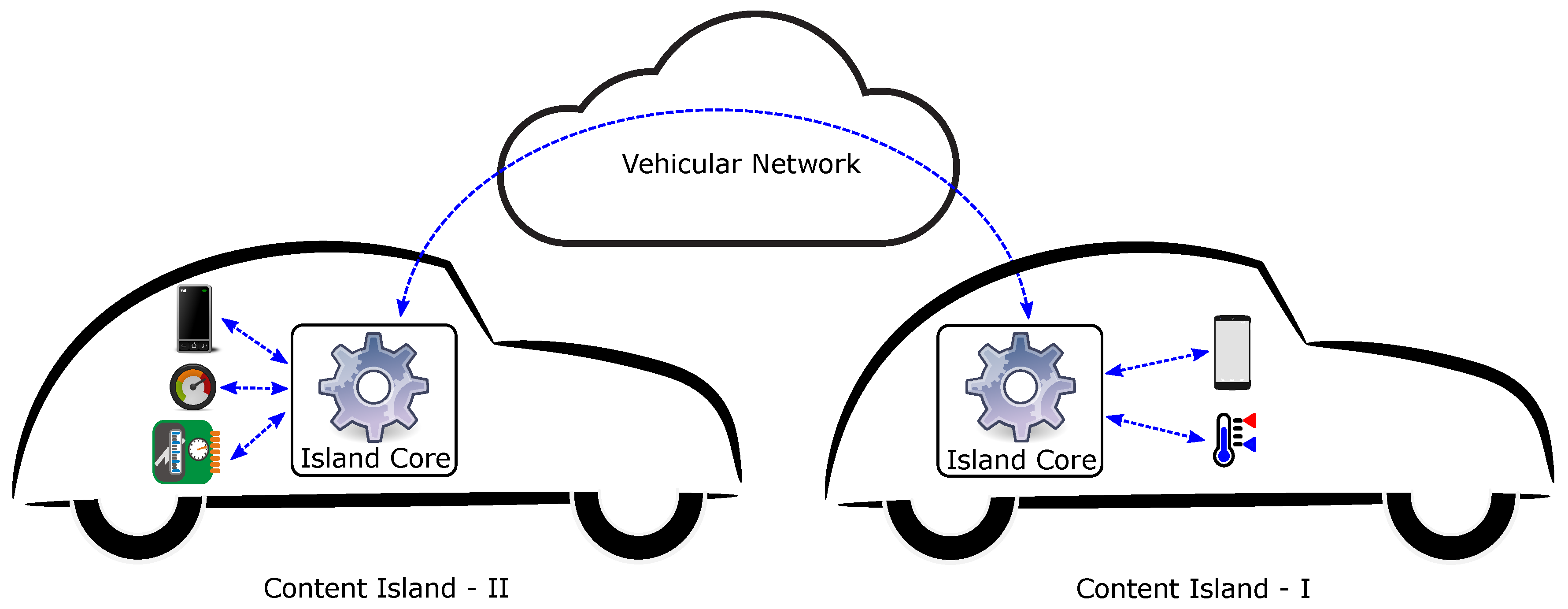
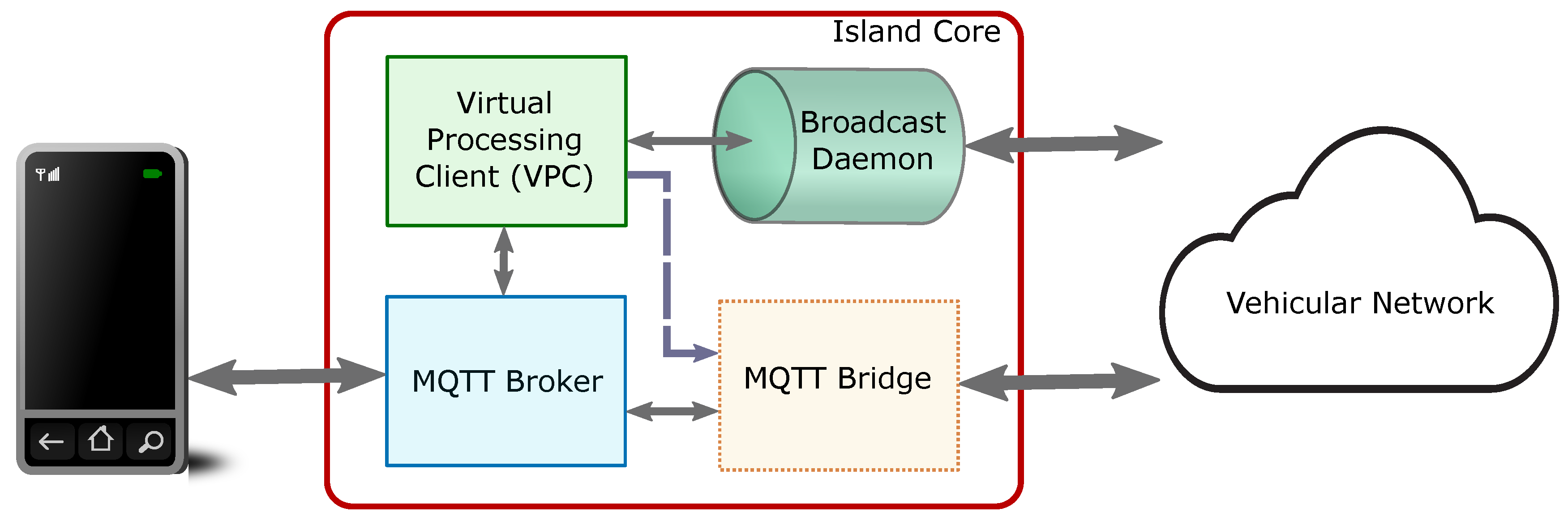
2. Proposed Architecture
3. An Application to Test the Architecture
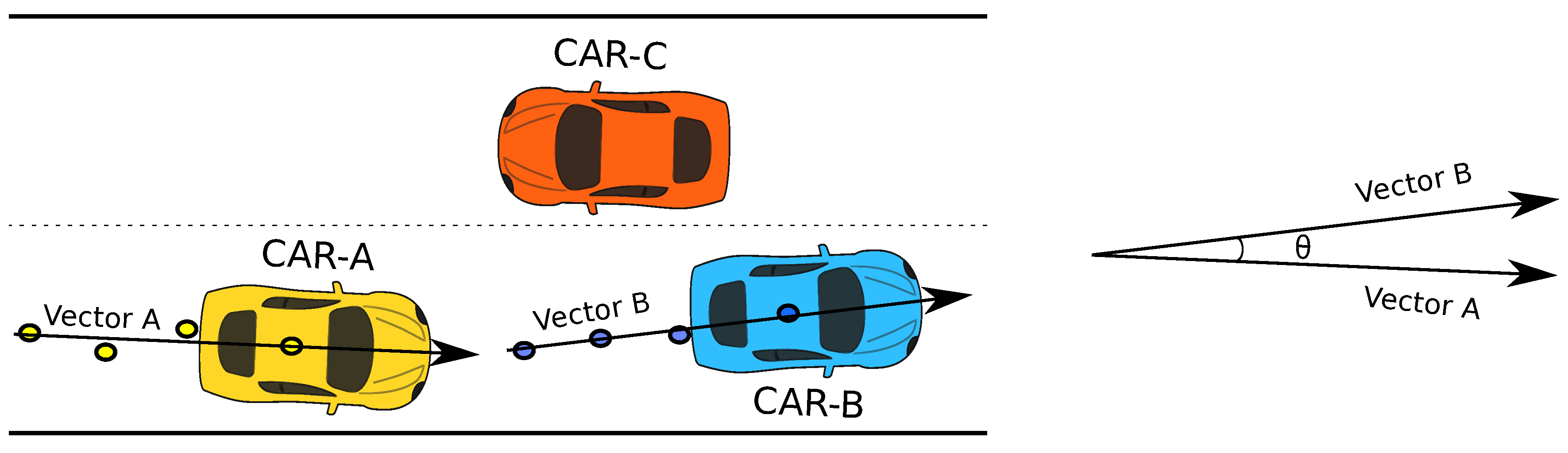
- Neighbour discovery: In this step, every smartphone running our application publishes an advertisement message to the island core. This message consists of an identifier, the actual license plate number of the vehicle within which the device is present, and the motion vector of the vehicle. At the same time, a device with our application running also subscribes to similar messages used for neighbour discovery. The island core, upon receiving such a message from a smartphone, appends its Internet Protocol (IP) address to the information, and shares it with other neighbouring islands. When a neighbouring island receives an advertisement message, it is forwarded to the device within that island and running our application. A list of suitable neighbours is prepared consisting of only those neighbours that are travelling in the same direction. Since the application has been designed to be used in scenarios involving two-laned roads with one lane per direction of traffic, we are left with neighbours travelling in the same direction that may be located ahead or behind the current vehicle.
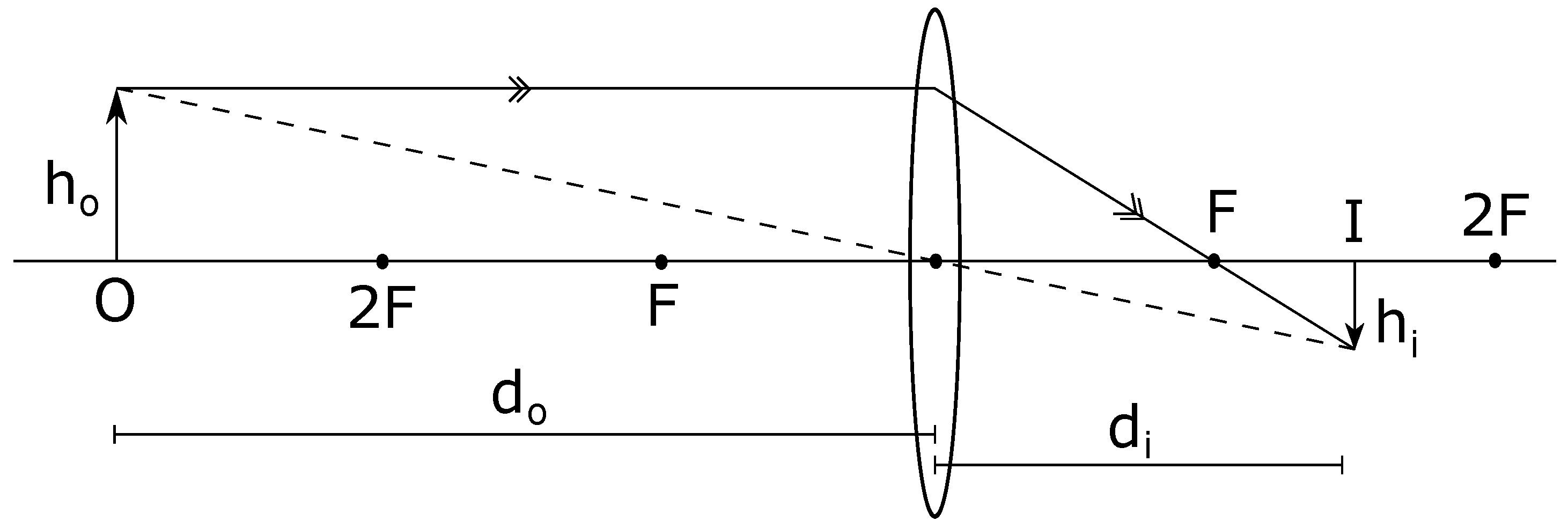
- Distance estimation: We rely on image processing for the estimation of distance between the two vehicles. Images captured continuously using the back camera of the dashboard mounted smartphone are analysed to recognise license plates appearing in them. Since the camera of the device faces the windshield, images contain vehicles present ahead, but that may be travelling in different directions. Comparing the identified plates with the entries in the neighbour list created in the previous step, which contains information regarding other vehicles travelling in the same direction, allows us to identify which vehicle is directly ahead. The size of the plate appearing in the images makes it possible to estimate the distance between the vehicles, and based on this estimate a decision about whether to generate a warning is made.
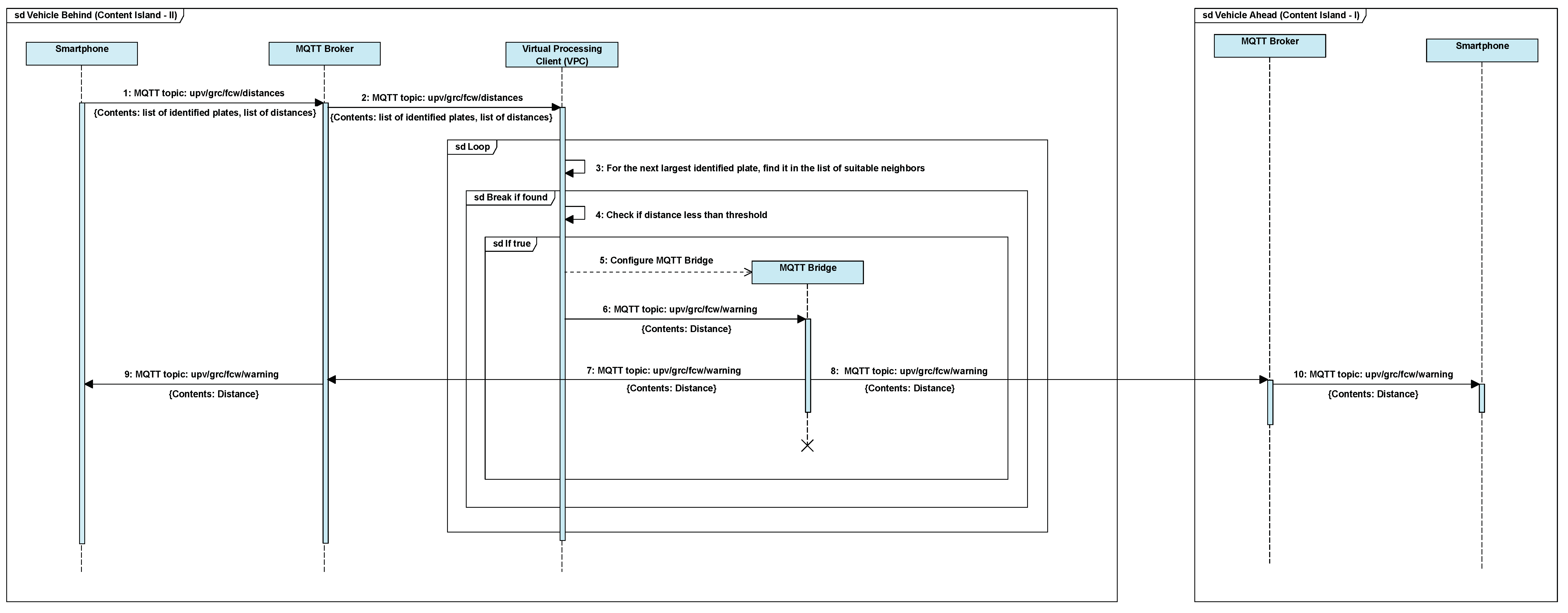
- Warning generation: If the distance between the license plate of the vehicle travelling ahead and the camera of the device present in the vehicle behind is less than a defined safe distance, the drivers of both the vehicles are alerted. A warning is displayed on the smartphone screen at the vehicle behind, and taking advantage of inter-island communication, the driver of the vehicle ahead is also notified. The IP address of the island core of the vehicle ahead is known as it was a part of advertisement messages being broadcasted by each vehicle or content island; this information would appear in the neighbour list prepared in the first step.
3.1. Neighbour Discovery
3.2. Distance Estimation
3.3. Warning Generation
4. Results
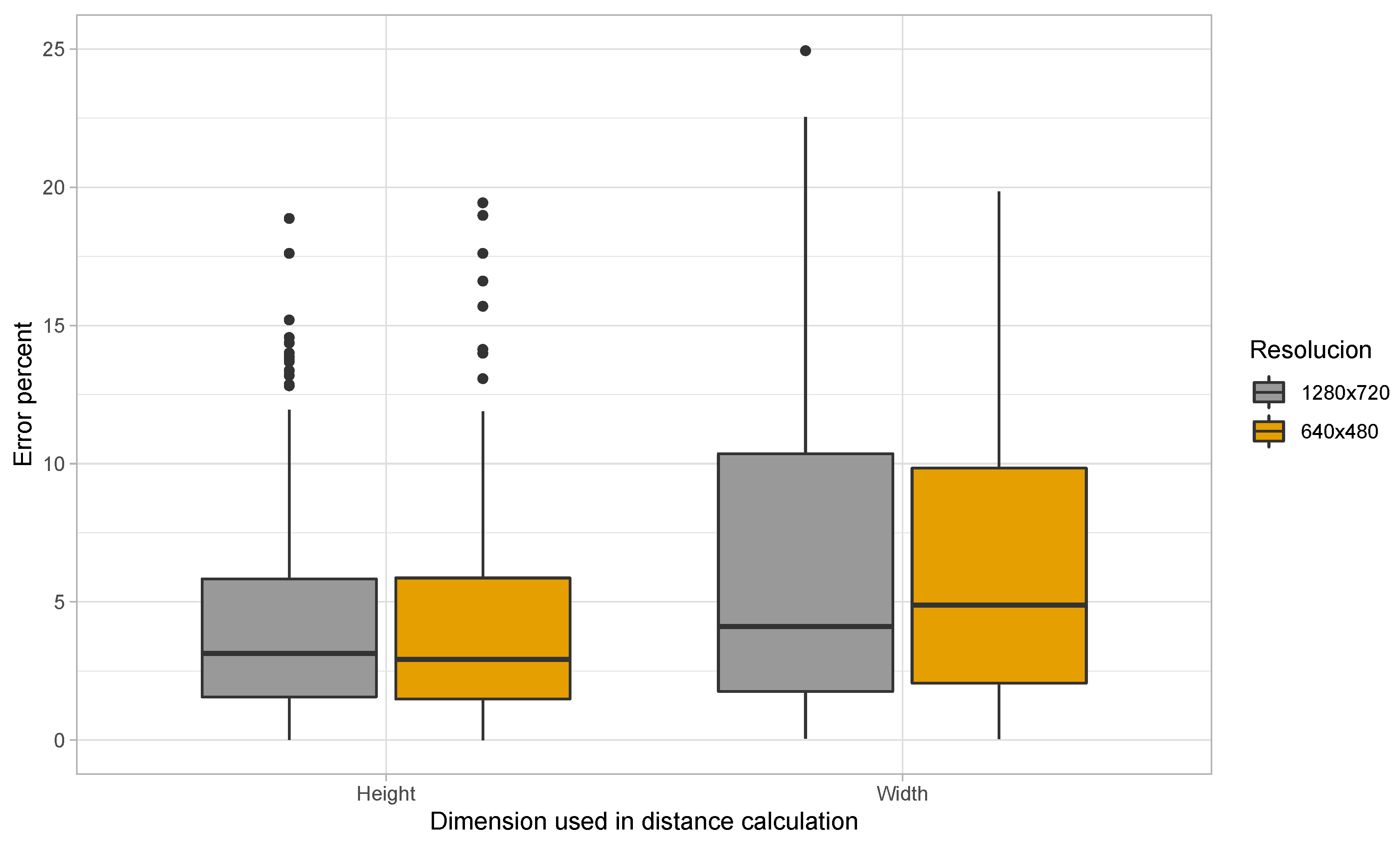
4.1. Validation of the Methodology
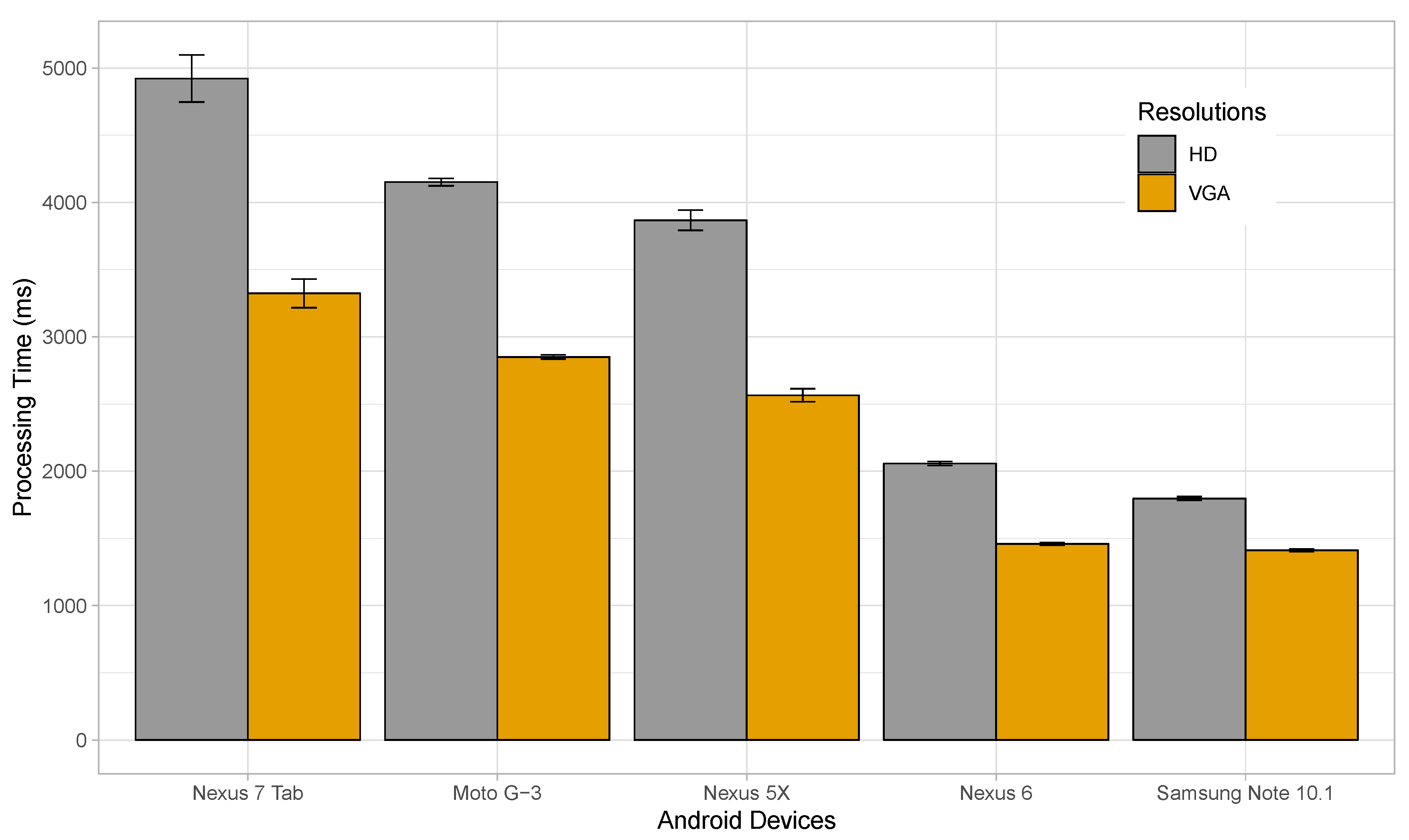
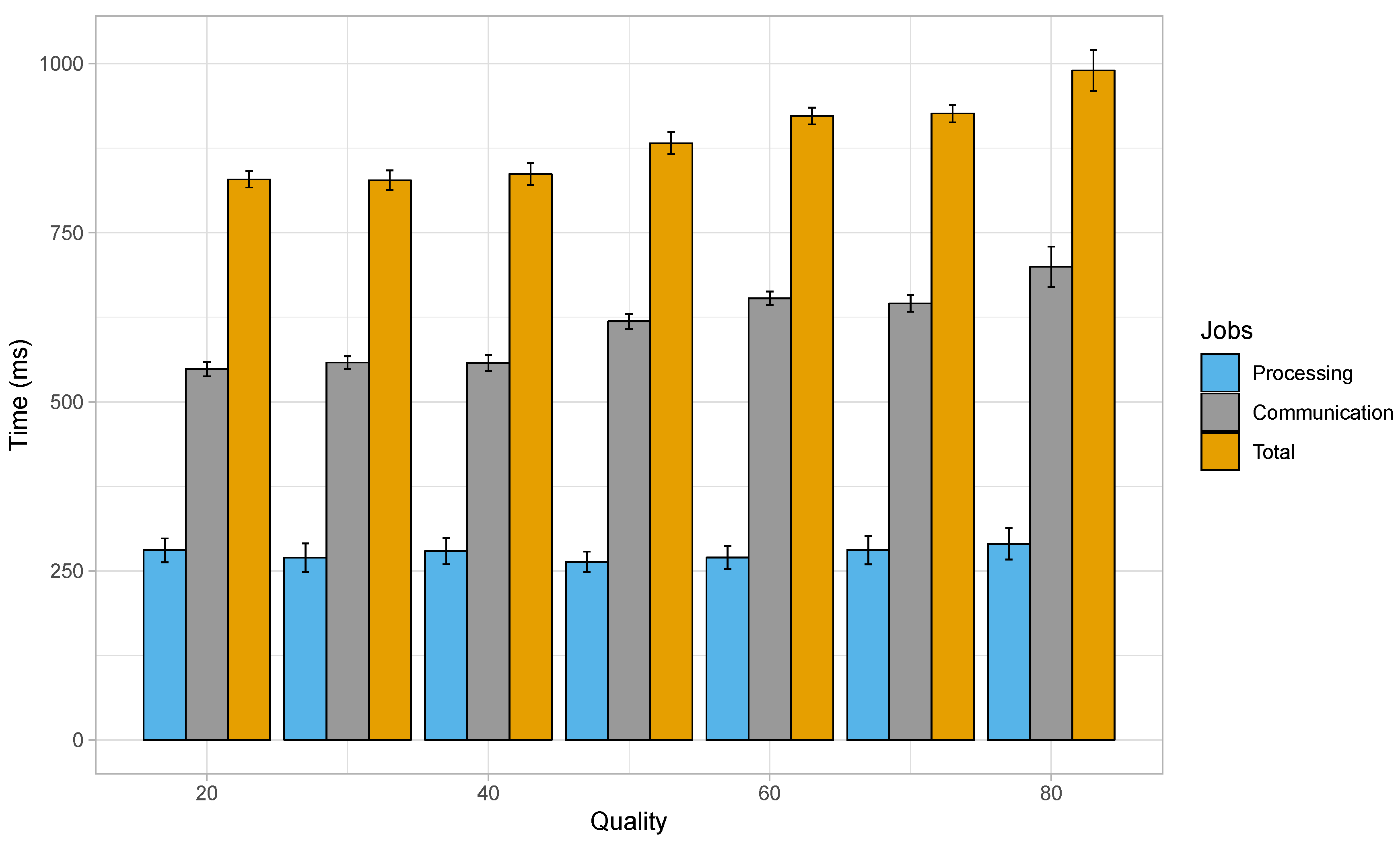
4.2. Delay Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 4G | 4th Generation (wireless/mobile communications) |
| API | Application Program Interface |
| AUTOSAR | AUTomotive Open System ARchitecture |
| BLOB | Binary Large OBject |
| CoAP | Constrained Application Protocol |
| FCW | Forward Collision Warning |
| GPS | Global Positioning System |
| HD | High Definition |
| HTTP | Hypertext Transfer Protocol |
| IEEE | Institute of Electrical and Electronics Engineers |
| IoT | Internet of Things |
| IP | Internet Protocol |
| ITS | Intelligent Transportation System |
| JPEG | Joint Photographic Experts Group |
| LBP | Local Binary Patterns |
| LiDAR | Light Detection and Ranging |
| LTE | Long-Term Evolution |
| MQTT | Message Queue Telemetry Transport |
| OBU | On-Board Unit |
| OS | Operating System |
| QVGA | Quarter Video Graphics Array |
| RAM | Random Access Memory |
| REST | REpresentational State Transfer |
| RSA | Road Safety Authority |
| RSUs | Roadside Units |
| SDN | Software-defined networking |
| UDP | User Datagram Protocol |
| VGA | Video Graphics Array |
| VNs | Vehicular Networks |
| VPC | Virtual Processing Client |
References
- Vaquero, L.M.; Rodero-Merino, L. Finding Your Way in the Fog: Towards a Comprehensive Definition of Fog Computing. SIGCOMM Comput. Commun. Rev. 2014, 44, 27–32. [Google Scholar] [CrossRef]
- Bonomi, F. Connected vehicles, the internet of things, and fog computing. In Proceedings of the Eighth ACM International Workshop on Vehicular Inter-Networking (VANET), Las Vegas, NV, USA, 23 September 2011; pp. 13–15. [Google Scholar]
- Bonomi, F.; Milito, R.; Natarajan, P.; Zhu, J. Fog computing: A platform for internet of things and analytics. In Big Data and Internet of Things: A Roadmap for Smart Environments; Springer: Cham, Germany, 2014; pp. 169–186. [Google Scholar]
- Stojmenovic, I.; Wen, S. The fog computing paradigm: Scenarios and security issues. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems, Warsaw, Poland, 7–10 September 2014; pp. 1–8. [Google Scholar]
- Stojmenovic, I. Fog computing: A cloud to the ground support for smart things and machine-to-machine networks. In Proceedings of the 2014 Australasian Telecommunication Networks and Applications Conference (ATNAC), Southbank, Australia, 26–28 November 2014; pp. 117–122. [Google Scholar]
- Hong, K.; Lillethun, D.; Ramachandran, U.; Ottenwälder, B.; Koldehofe, B. Mobile fog: A programming model for large-scale applications on the internet of things. In Proceedings of the Second ACM SIGCOMM Workshop on Mobile Cloud Computing, Hong Kong, China, 12 August 2013; pp. 15–20. [Google Scholar]
- Zhu, J.; Chan, D.S.; Prabhu, M.S.; Natarajan, P.; Hu, H.; Bonomi, F. Improving web sites performance using edge servers in fog computing architecture. In Proceedings of the 2013 IEEE Seventh International Symposium on Service-Oriented System Engineering, Redwood City, CA, USA, 25–28 March 2013; pp. 320–323. [Google Scholar]
- Aazam, M.; Huh, E.N. Fog computing and smart gateway based communication for cloud of things. In Proceedings of the 2014 International Conference on Future Internet of Things and Cloud, Barcelona, Spain, 27–29 August 2014; pp. 464–470. [Google Scholar]
- MQTT Version 3.1.1. Available online: http://docs.oasis-open.org/mqtt/mqtt/v3.1.1/os/mqtt-v3.1.1-os.doc (accessed on 14 May 2019).
- Aditya, G.T.; Prakash, N.K. Smart and Efficient Outdoor Lighting System. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 1598–1602. [Google Scholar]
- Nimmaka, B.; Prakasarao, A. Implementation of Indoor Pollution Monitoring Using MQTT Protocol. In Proceedings of the 2018 Second International Conference on Inventive Communication and Computational Technologies (ICICCT), Coimbatore, India, 20–21 April 2018; pp. 1316–1319. [Google Scholar]
- Ghosh, S.; Ghosh, S.; Dayani, M. Design of an Unlimited Range Web Browser Controlled Robot with Self-Adapting Fuzzy Logic Controller. In Proceedings of the 2018 Second International Conference on Inventive Communication and Computational Technologies (ICICCT), Coimbatore, India, 20–21 April 2018; pp. 1294–1300. [Google Scholar]
- Crisnapati, P.N.; Wulaning, P.D.; Hendrawan, I.N.R.; Bandanagara, A.A.K.B. Earthquake Damage Intensity Scaling System based on Raspberry Pi and Arduino Uno. In Proceedings of the 2018 6th International Conference on Cyber and IT Service Management (CITSM), Parapat, Indonesia, 7–9 August 2018; pp. 1–4. [Google Scholar]
- Rajan, V.; Sobhana, N.; Jayakrishnan, R. Machine Fault Diagnostics and Condition Monitoring Using Augmented Reality and IoT. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 910–914. [Google Scholar]
- Sultana, T.; Wahid, K.A. Choice of Application Layer Protocols for Next Generation Video Surveillance using Internet of Video Things. IEEE Access 2019, 7, 41607–41624. [Google Scholar] [CrossRef]
- Mehmood, F.; Ullah, I.; Ahmad, S.; Kim, D. Object detection mechanism based on deep learning algorithm using embedded IoT devices for smart home appliances control in CoT. J. Ambient. Intell. Humaniz. Comput. 2019, 1–17. [Google Scholar] [CrossRef]
- Šandor, R.; Stepanoviæ, M.; Bjelica, M.; Samardžija, D. Vehicle2X communication proposal for Adaptive AUTOSAR. In Proceedings of the 2018 IEEE 8th International Conference on Consumer Electronics-Berlin (ICCE-Berlin), Berlin, Germany, 2–5 September 2018; pp. 1–3. [Google Scholar]
- Fürst, S.; Mössinger, J.; Bunzel, S.; Weber, T.; Kirschke-Biller, F.; Heitkämper, P.; Kinkelin, G.; Nishikawa, K.; Lange, K. AUTOSAR–A Worldwide Standard is on the Road. In Proceedings of the 14th International VDI Congress Electronic Systems for Vehicles, Baden-Baden, Germany, 7–8 October 2009; p. 5. [Google Scholar]
- Madisa, M.K.; Joseph, M.K. Android and Cloud Based Traffic Control System. In Proceedings of the 2018 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Durban, South Africa, 6–7 August 2018; pp. 1–4. [Google Scholar]
- Taghizadeh, S.; Jamborsalamati, P.; Hossain, M.; Lu, J. Design and Implementation of an Advanced Vehicle-to-Vehicle (V2V) Power Transfer Operation Using Communications. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Laaroussi, Z.; Morabito, R.; Taleb, T. Service Provisioning in Vehicular Networks through Edge and Cloud: an Empirical Analysis. In Proceedings of the 2018 IEEE Conference on Standards for Communications and Networking (CSCN), Paris, France, 29–31 October 2018; pp. 1–6. [Google Scholar]
- Fielding, R.; Gettys, J.; Mogul, J.; Frystyk, H.; Masinter, L.; Leach, P.; Berners-Lee, T. Hypertext Transfer Protocol–HTTP/1.1. Technical Report. June 1999. Available online: https://tools.ietf.org/html/rfc2616 (accessed on 4 September 2019).
- Shelby, Z.; Hartke, K.; Bormann, C. The Constrained Application Protocol (CoAP). Technical Report. June 2014. Available online: https://tools.ietf.org/html/rfc7252 (accessed on 4 September 2019).
- Rakhonde, M.A.; Khoje, S.; Komati, R. Vehicle Collision Detection and Avoidance with Pollution Monitoring System Using IoT. In Proceedings of the 2018 IEEE Global Conference on Wireless Computing and Networking (GCWCN), Lonavala, India, 23–24 November 2018; pp. 75–79. [Google Scholar]
- Shaout, A.; Crispin, B. Cloud Based System for Detecting Children in Automobiles. In Proceedings of the 2018 International Arab Conference on Information Technology (ACIT), Werdanye, Lebanon, 28–30 November 2018; pp. 1–6. [Google Scholar]
- Woll, J.D. VORAD collision warning radar. In Proceedings of the International Radar Conference, Alexandria, VA, USA, 8–11 May 1995; pp. 369–372. [Google Scholar]
- Miller, R.; Huang, Q. An adaptive peer-to-peer collision warning system. In Proceedings of the Vehicular Technology Conference, VTC Spring 2002, Birmingham, AL, USA, 6–9 May 2002; pp. 317–321. [Google Scholar]
- Srinivasa, N. Vision-based vehicle detection and tracking method for forward collision warning in automobiles. In Proceedings of the Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; pp. 626–631. [Google Scholar]
- Srinivasa, N.; Chen, Y.; Daniell, C. A fusion system for real-time forward collision warning in automobiles. In Proceedings of the 2003 IEEE International Conference on Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; pp. 457–462. [Google Scholar]
- Dagan, E.; Mano, O.; Stein, G.P.; Shashua, A. Forward collision warning with a single camera. In Proceedings of the IEEE 2004 Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 37–42. [Google Scholar]
- Zhang, Y.; Kiselewich, S.J.; Bauson, W.A. Legendre and Gabor moments for vehicle recognition in forward collision warning. In Proceedings of the Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1185–1190. [Google Scholar]
- Lin, H.Y.; Chen, L.Q.; Lin, Y.H.; Yu, M.S. Lane departure and front collision warning using a single camera. In Proceedings of the 2012 International Symposium on Intelligent Signal Processing and Communications Systems (ISPACS), Taipei, Taiwan, 4–7 November 2012; pp. 64–69. [Google Scholar]
- Coelingh, E.; Jakobsson, L.; Lind, H.; Lindman, M. Collision warning with auto brake: A real-life safety perspective. In Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Lyon, France, 18–21 June 2007. [Google Scholar]
- Coelingh, E.; Eidehall, A.; Bengtsson, M. Collision warning with full auto brake and pedestrian detection-a practical example of automatic emergency braking. In Proceedings of the 2010 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010; pp. 155–160. [Google Scholar]
- Volvo Official Website. Available online: https://www.volvocars.com/ (accessed on 6 June 2018).
- Liu, J.F.; Su, Y.F.; Ko, M.K.; Yu, P.N. Development of a vision-based driver assistance system with lane departure warning and forward collision warning functions. In Proceedings of the Computing: Techniques and Applications, Canberra, Australia, 1–3 December 2008; pp. 480–485. [Google Scholar]
- Chang, B.R.; Tsai, H.F.; Young, C.P. Intelligent data fusion system for predicting vehicle collision warning using vision/GPS sensing. Expert Syst. Appl. 2010, 37, 2439–2450. [Google Scholar] [CrossRef]
- Misener, J.A.; Sengupta, R.; Krishnan, H. Cooperative collision warning: Enabling crash avoidance with wireless technology. In Proceedings of the 12th World Congress on ITS, San Francisco, CA, USA, 6–10 November 2005. [Google Scholar]
- Tan, H.S.; Huang, J. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints. IEEE Trans. Intell. Transp. Syst. 2006, 7, 415–428. [Google Scholar] [CrossRef]
- Lei, Z.; Jianqiang, W.; Keqiang, L. Forward collision warning system based on thasv-ii platform. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, ICVES 2006, Shanghai, China, 13–15 December 2006; pp. 255–258. [Google Scholar]
- Gelernter, D. Generative communication in Linda. ACM Trans. Program. Lang. Syst. (TOPLAS) 1985, 7, 80–112. [Google Scholar] [CrossRef]
- Raspberry Pi Official Website. Available online: https://www.raspberrypi.org/ (accessed on 4 September 2019).
- Postel, J. User Datagram Protocol. Technical Report. 28 August 1980. Available online: https://tools.ietf.org/html/rfc768 (accessed on 4 September 2019).
- Wallace, G.K. The JPEG still picture compression standard. Commun. ACM 1991, 34, 30–44. [Google Scholar] [CrossRef]
- Ahonen, T.; Hadid, A.; Pietikainen, M. Face description with local binary patterns: Application to face recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 2037–2041. [Google Scholar] [CrossRef] [PubMed]
- Wolf, C.; Jolion, J.M.; Chassaing, F. Text localization, enhancement and binarization in multimedia documents. In Proceedings of the 16th International Conference on Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002; pp. 1037–1040. [Google Scholar]
- Sauvola, J.; Pietikäinen, M. Adaptive document image binarization. Pattern Recognit. 2000, 33, 225–236. [Google Scholar] [CrossRef] [Green Version]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Road Safety Authority of Ireland Suggest the Use of Two Second Rule. Available online: http://www.rotr.ie/Rules_of_the_road.pdf (accessed on 7 June 2018).
- New York State Department of Motor Vehicles. Available online: https://dmv.ny.gov/about-dmv/chapter-8-defensive-driving (accessed on 8 June 2018).
- OpenALPR Cloud-API Website. Available online: https://www.openalpr.com/cloud-api.html (accessed on 10 July 2019).
- Patra, S.; Calafate, C.T.; Cano, J.; Manzoni, P. An ITS solution providing real-time visual overtaking assistance using smartphones. In Proceedings of the 2015 IEEE 40th Conference on Local Computer Networks (LCN), Clearwater Beach, FL, USA, 26–29 October 2015; pp. 270–278. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patra, S.; Manzoni, P.; T. Calafate, C.; Zamora, W.; Cano, J.-C. Leveraging a Publish/Subscribe Fog System to Provide Collision Warnings in Vehicular Networks. Sensors 2019, 19, 3852. https://doi.org/10.3390/s19183852
Patra S, Manzoni P, T. Calafate C, Zamora W, Cano J-C. Leveraging a Publish/Subscribe Fog System to Provide Collision Warnings in Vehicular Networks. Sensors. 2019; 19(18):3852. https://doi.org/10.3390/s19183852
Chicago/Turabian StylePatra, Subhadeep, Pietro Manzoni, Carlos T. Calafate, Willian Zamora, and Juan-Carlos Cano. 2019. "Leveraging a Publish/Subscribe Fog System to Provide Collision Warnings in Vehicular Networks" Sensors 19, no. 18: 3852. https://doi.org/10.3390/s19183852
APA StylePatra, S., Manzoni, P., T. Calafate, C., Zamora, W., & Cano, J. -C. (2019). Leveraging a Publish/Subscribe Fog System to Provide Collision Warnings in Vehicular Networks. Sensors, 19(18), 3852. https://doi.org/10.3390/s19183852