Experimental Evaluation of an RSSI-Based Localization Algorithm on IoT End-Devices



Abstract
:1. Introduction
2. Related Work
3. Proposed Algorithm
3.1. Fuzzy Ring-Overlapping Range-Free Algorithm
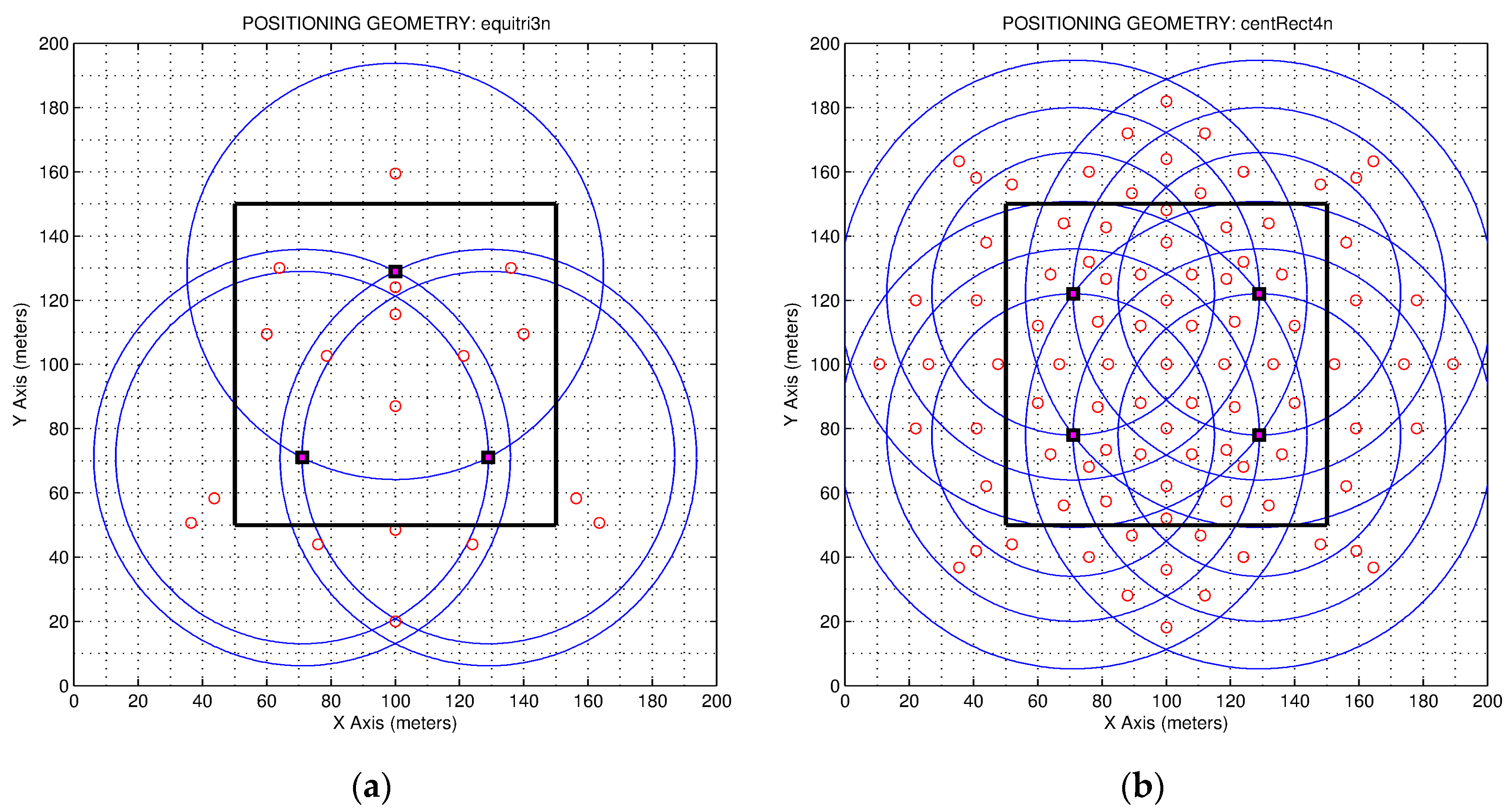
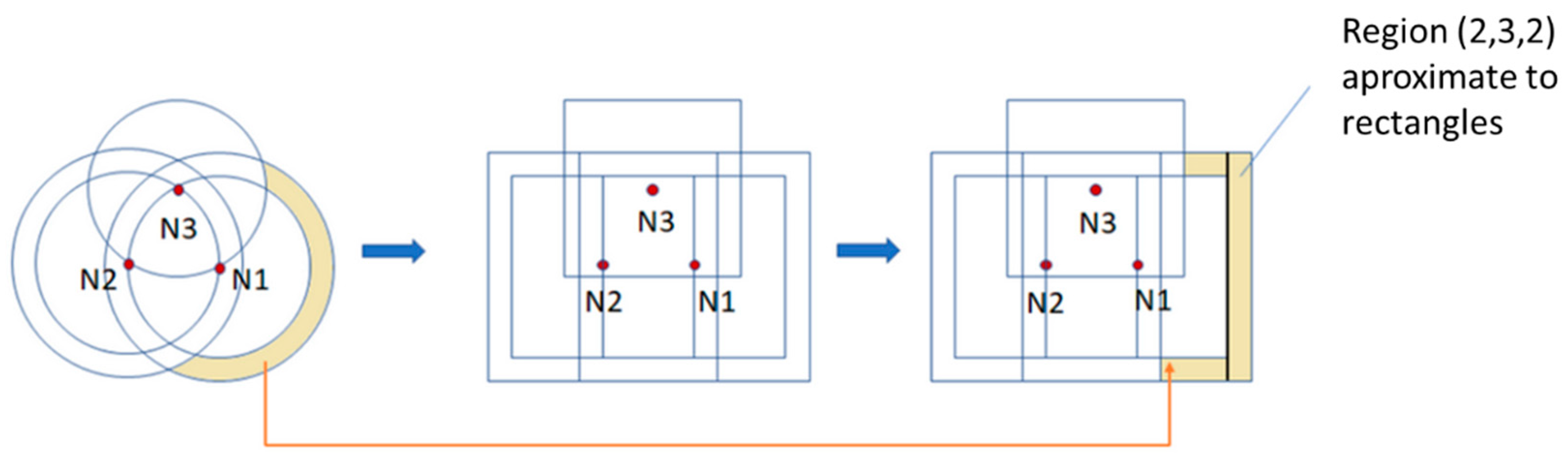
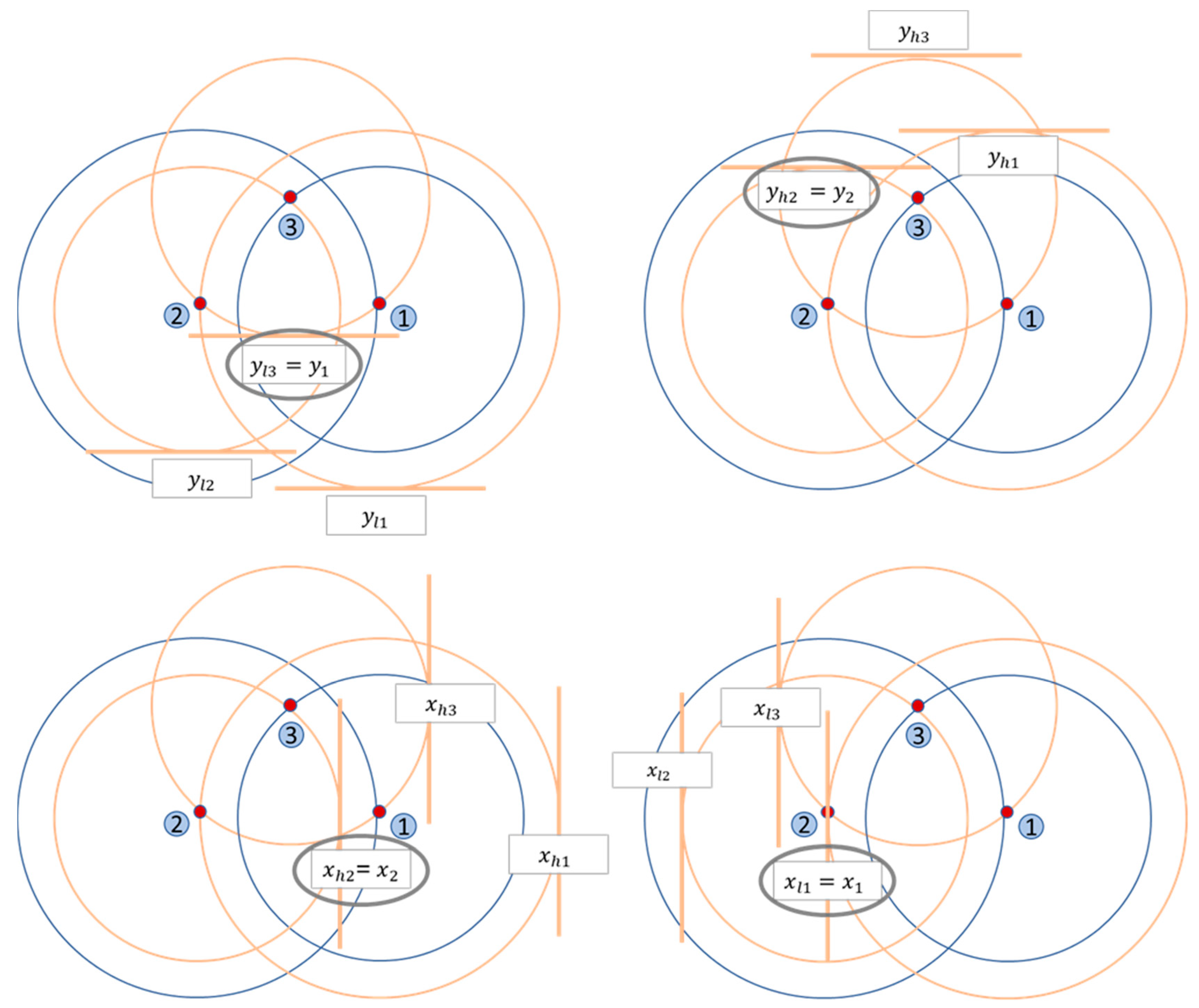
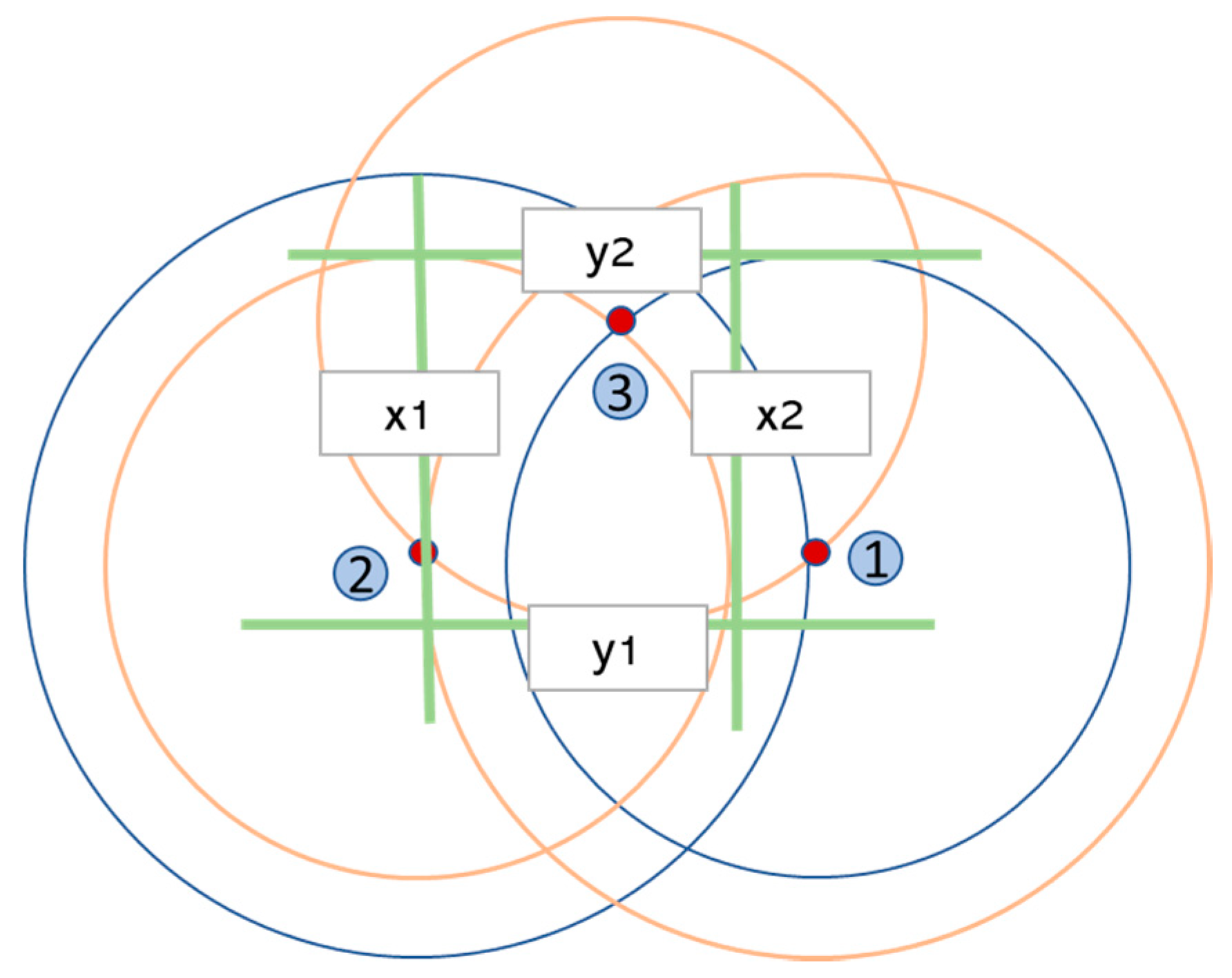
- Distance between anchor nodes: Each anchor node traces N-1 circles, N being the number of anchor nodes. The radius of those circles or rings are the distances between each pair of nodes and are numbered from 1 to N, with the interior ring being the first. The numbering of the interior area of a ring will be defined by its circle number as shown in Figure 1.
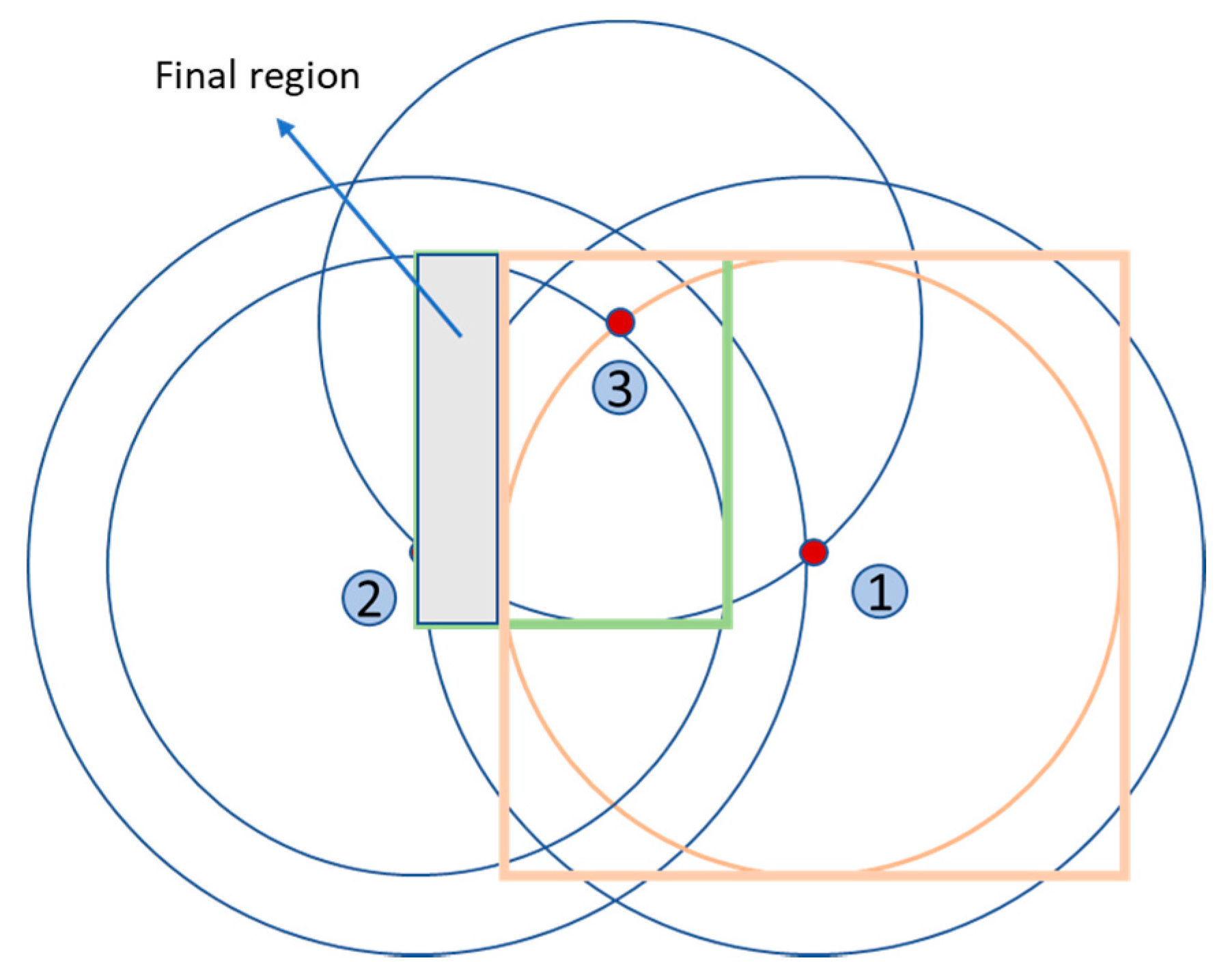
- Localization regions: The intersections between the different rings divide the space into the different localization regions. Each one of these regions is associated with a unique area number to differentiate them from each other.
- Area codes: This code is composed of the sequence of numbers of the rings that make up the region. Figure 2. Regions and area codes show two shaded regions, regions 1 and 2. The region 1 code is (3,3,1) which is the intersection of rings 3, 3 and 1 of nodes 1, 2 and 3 respectively. In the case of region 2, it is inside ring 2 of node 1 and inside the ring 1 of the nodes 2 and 3, so its code is (2,1,1). Finally, the regionalization map consists of the set of all the possible area codes.
- corresponds to the distance between the sensor node and the anchor node n;
- corresponds to the radius of the ring i of the anchor node n.
- is a positive real-value corresponding to the radius of the exterior ring as shown in the Figure 3;
- is a positive real-value corresponding to the radius of the interior ring as shown in the Figure 3;
- is a positive real-value corresponding to the estimated distance between the node to be located and the anchor node as shown in the Figure 3;
- is the level of fuzzification, a value between 0 and 1 that controls the width of the fuzzy region in the vicinity of ring boundaries, and .
- is the code of the region;
- is the degree of belonging to the region with code c defined as .
3.2. FRORF Implementation
- [mW] is the received signal power;
- [mW] is the transmitted signal power;
- [m] is the wavelength of the signal in meters;
- [m] is the distance between the receiver and the transmitter in meters;
- is the coefficient that represents the propagation loss as a function of the direction.
- The estimated distance between the node to be located and the anchor nodes is larger than the radius of all exterior rings.
- The area code obtained does not correspond to any region, because the rings that compose it do not intersect.
4. Materials and Methods
4.1. Hardware and Software
4.2. Methodology
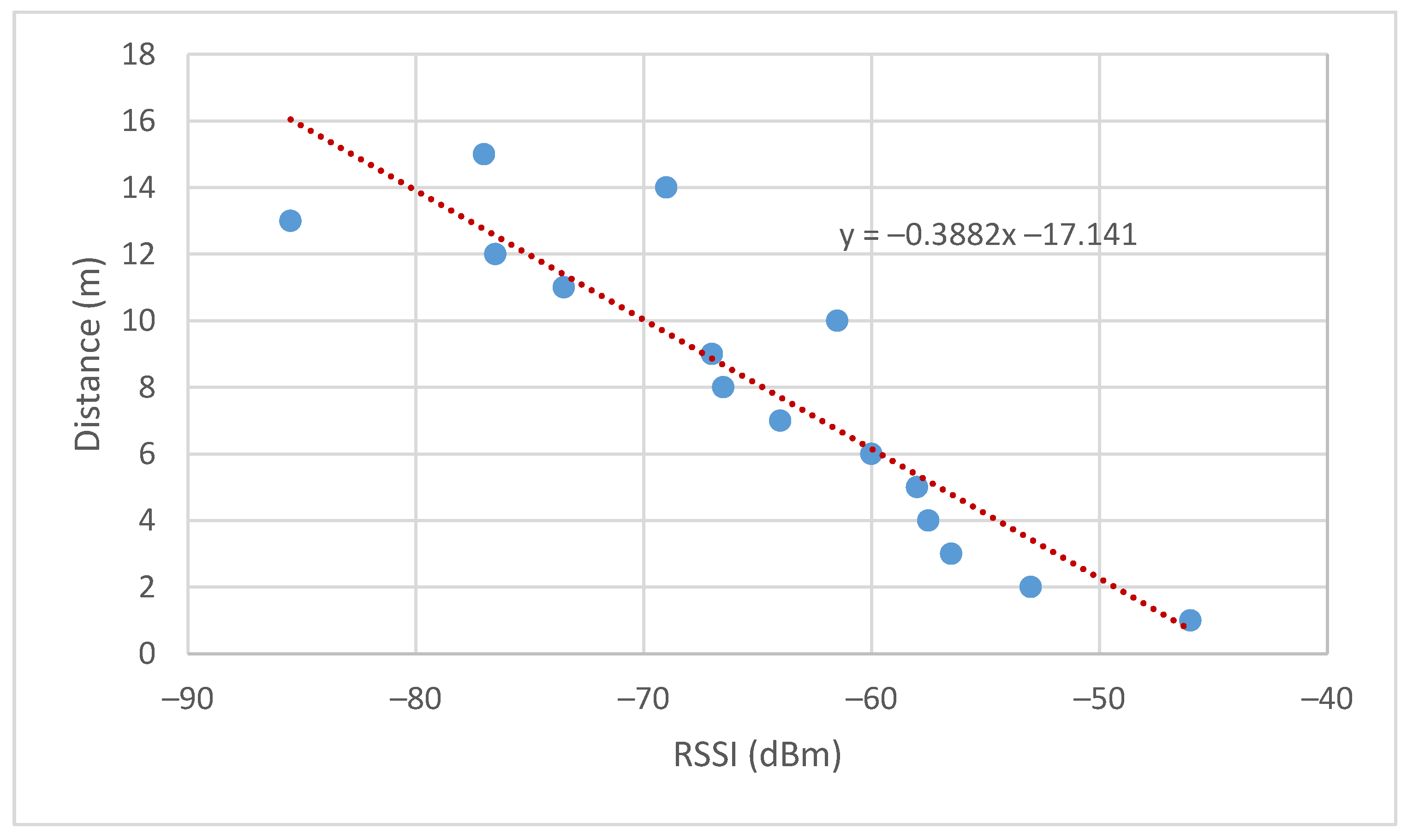
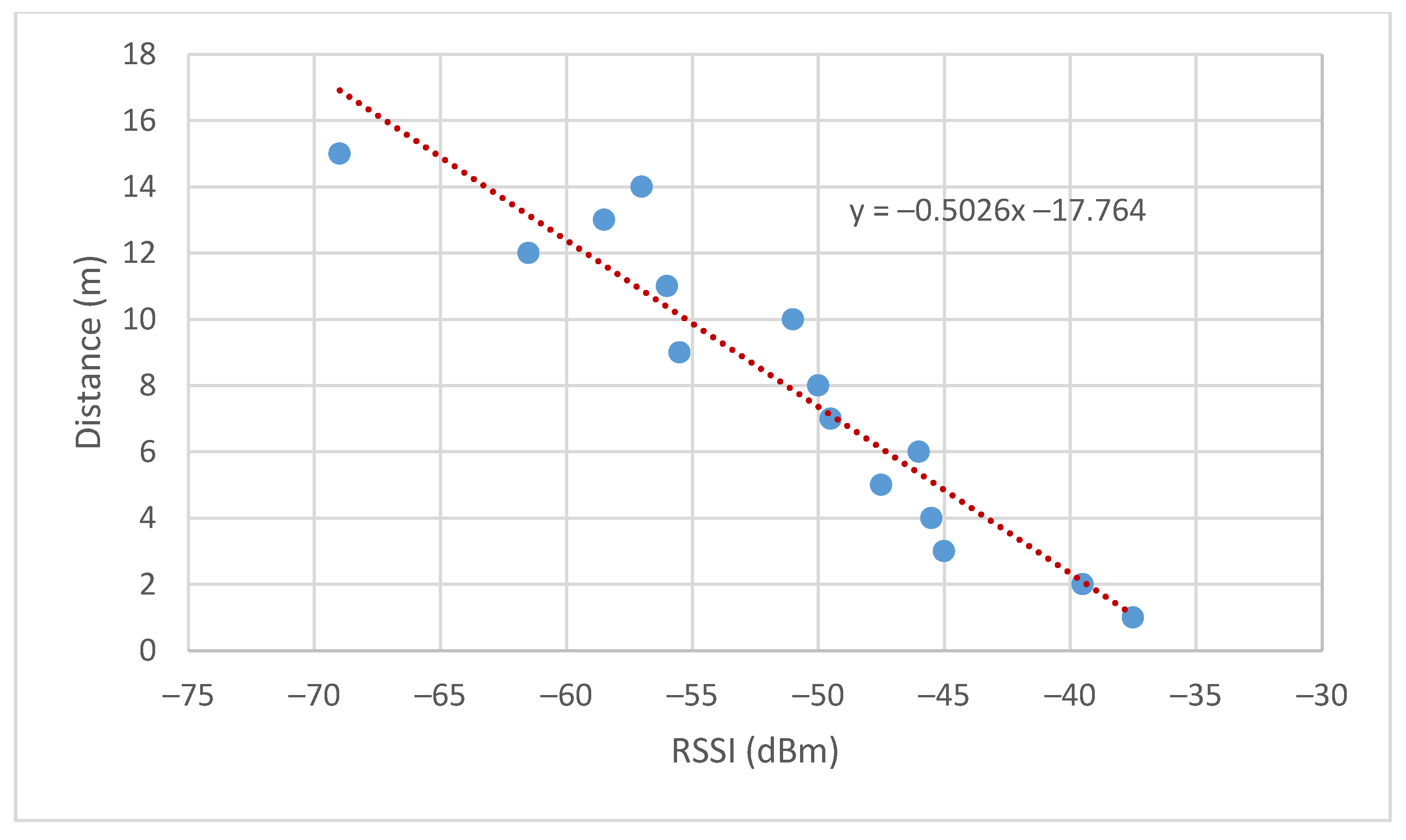
4.2.1. Distance Calculations
- PL corresponds to the total propagation loss measured in decibels (dB);
- PTxdBm corresponds to the transmitted power in dBm;
- PRxdBm corresponds to the received power in dBm;
- PL0 corresponds to the total propagation loss measured in a reference distance d0;
- d [m] corresponds to the distance between transmitter and receiver;
- d0 [m] corresponds to the reference distance used to measure PL0;
- corresponds to the propagation loss exponent;
- corresponds to the parameter that reflects the attenuation caused by the plane fade. In this case it is assumed to equal to zero.
- corresponds to the signal power in dBm received by anchor node Bi from another anchor node Bk;
- corresponds to the distance between Bi and Bk.
- corresponds to the signal power in dBm received by an anchor node Bi from the node to be located S;
- corresponds to the distance between Bi and S.
- FRORF implementation.
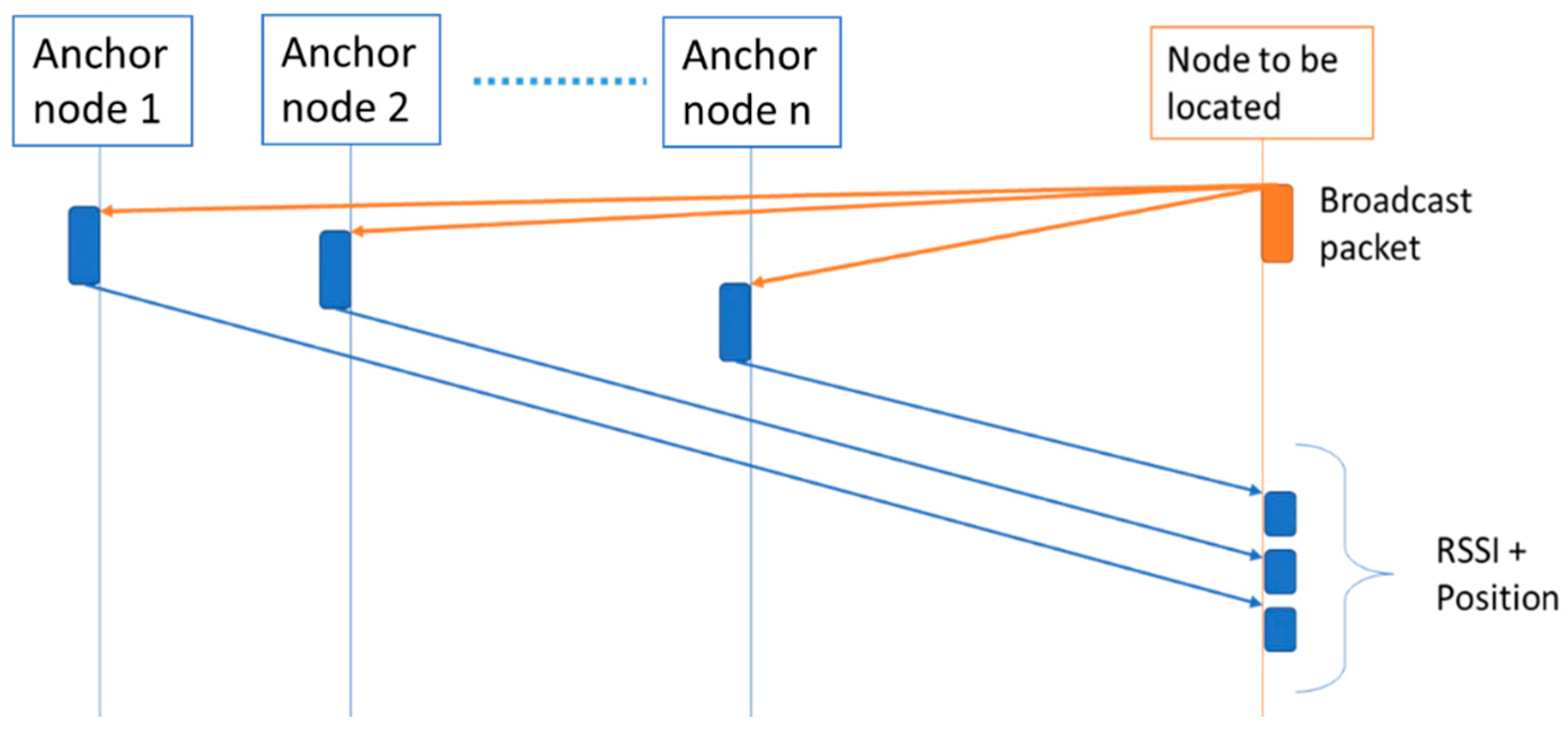
4.2.2. Localization Algorithm Procedure
- Sensor node: It sends a data request broadcast packet for all the anchor nodes in range and waits for their responses. When a fixed time of 40 ms is reached, the sensor node should have received the response packet of the anchor nodes containing their position as well as the RSSI values. Then, based on the received data, the sensor node executes the full localization algorithm explained before to obtain a position. We have assumed that the sensor node has no previous data of the anchor nodes’ positions, so the localization algorithm must be fully executed each time. In this way, we have selected a flexible approach (i.e., the anchor nodes may be mobile, or the sensor node may be also mobile in an unknown anchor nodes’ infrastructure), that should provide the worst-case results in terms of processing load.
- Anchor nodes: These nodes are always listening. When a data request broadcast packet is received, they send a reply with their position data, the address and the RSSI of the received packet.
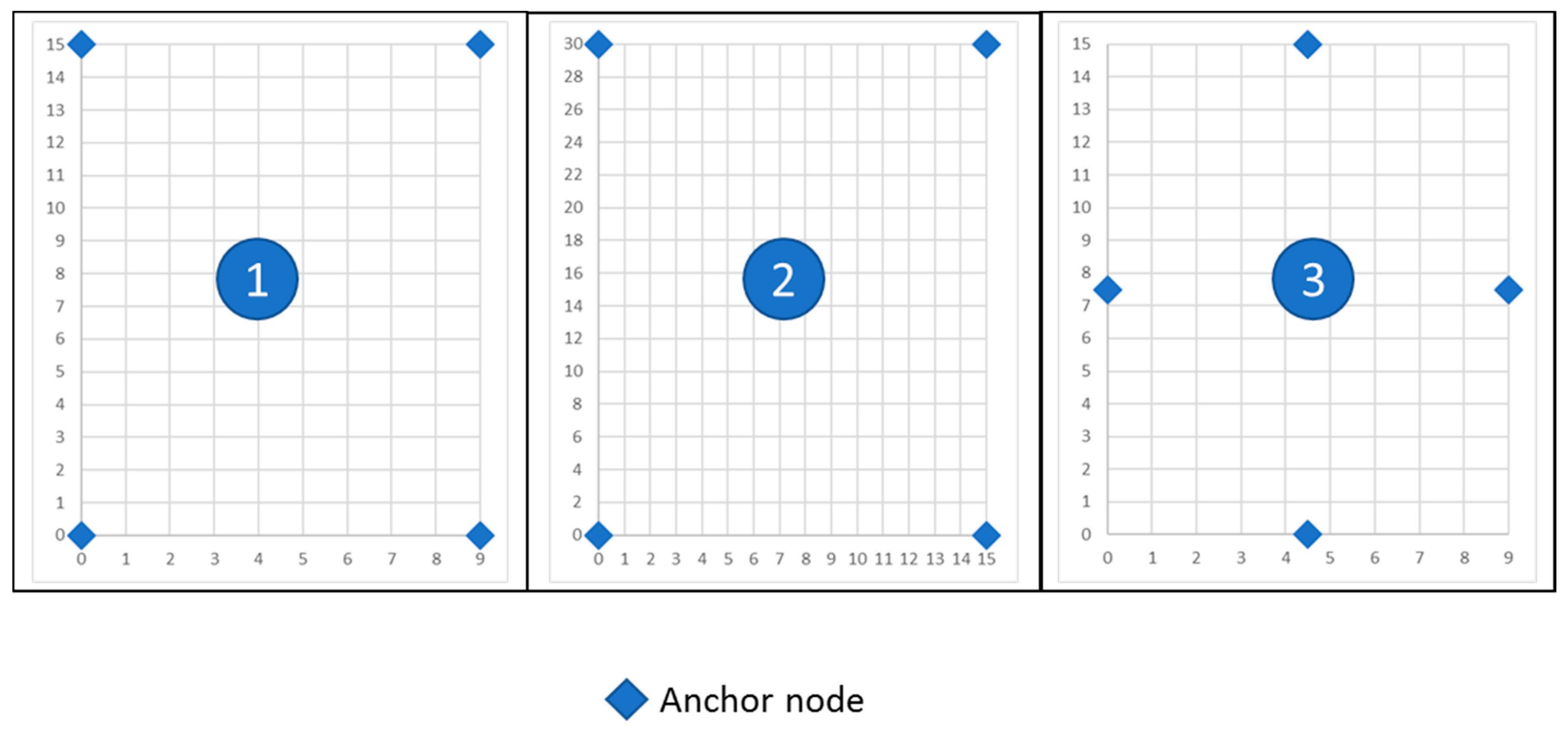
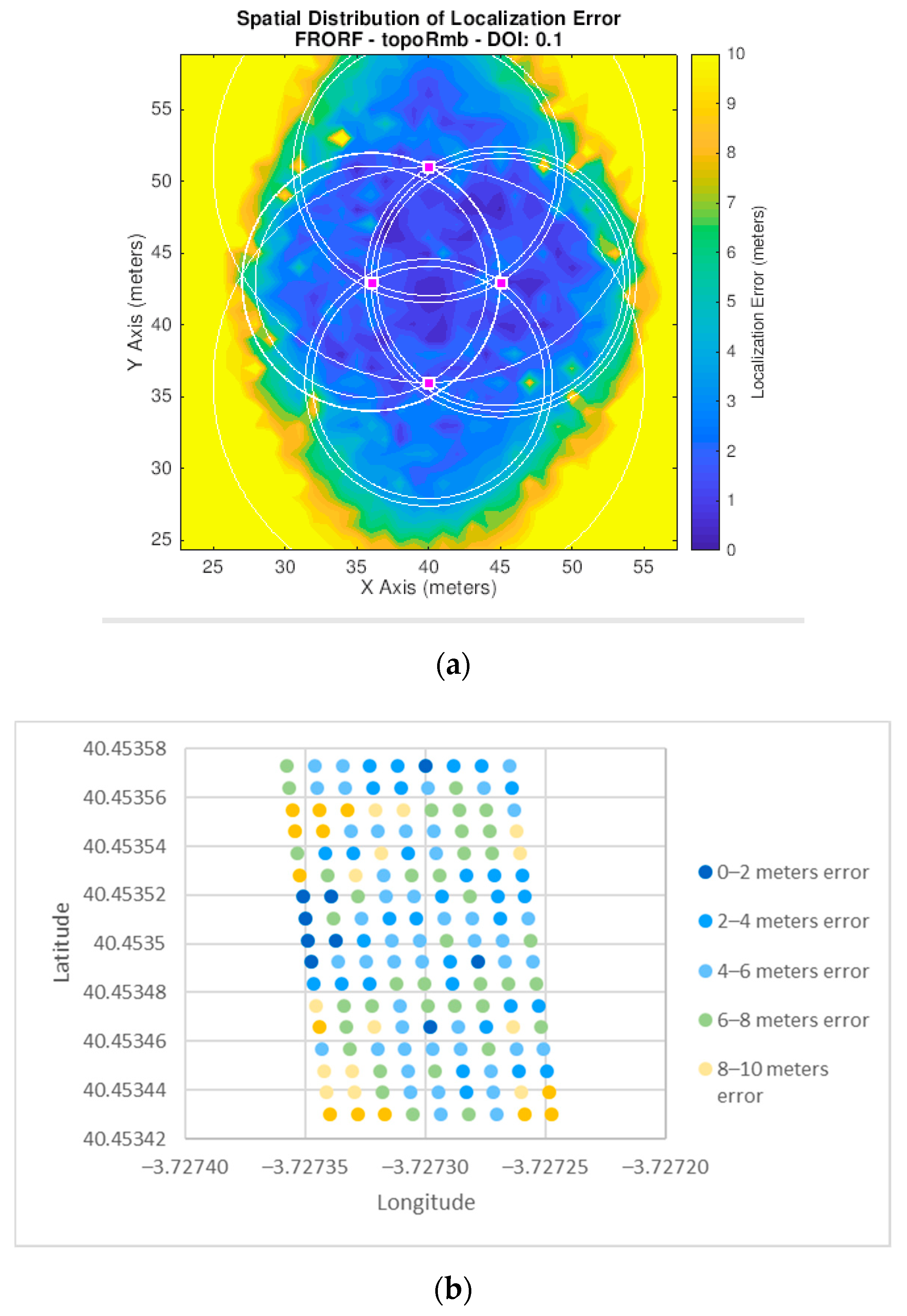
4.2.3. Experimental Scenarios
5. Results
6. Discussion
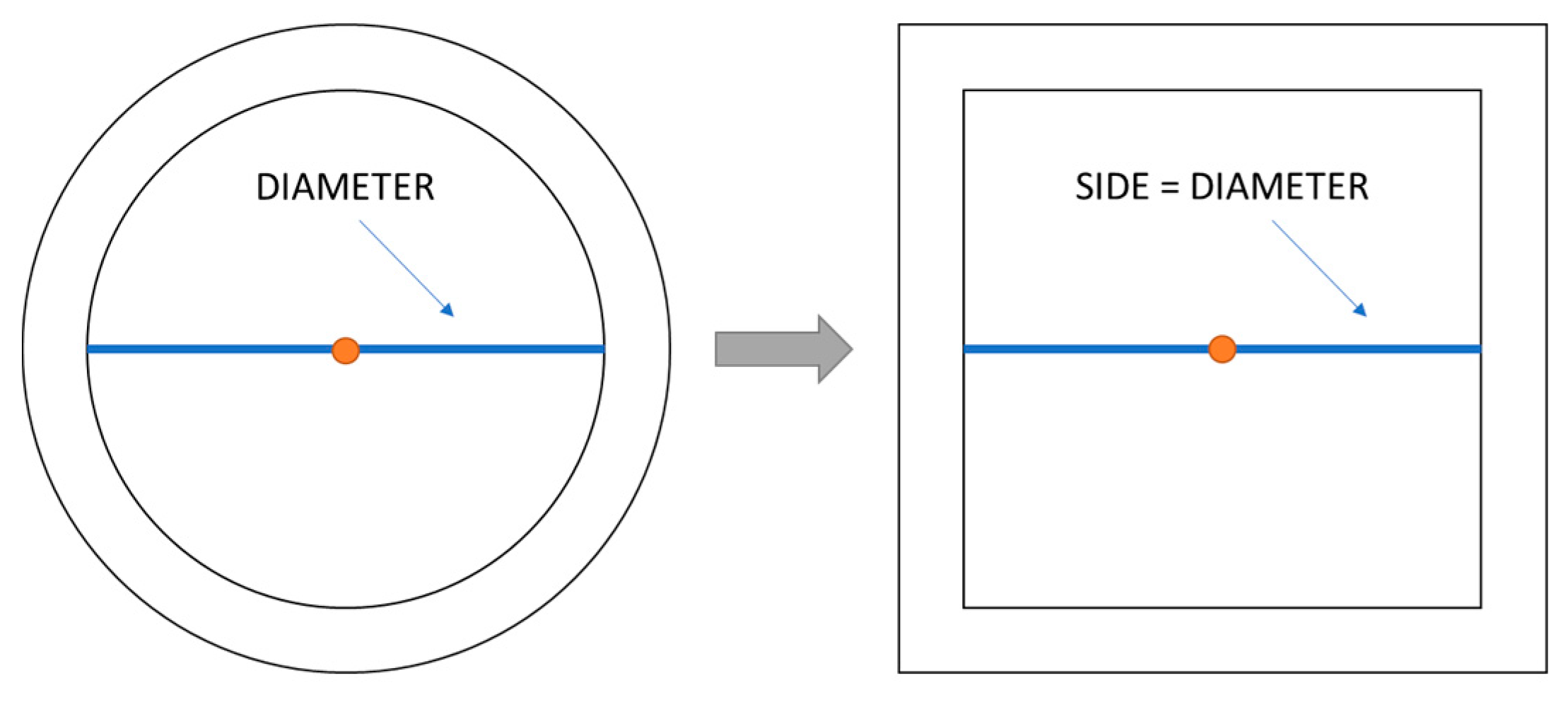
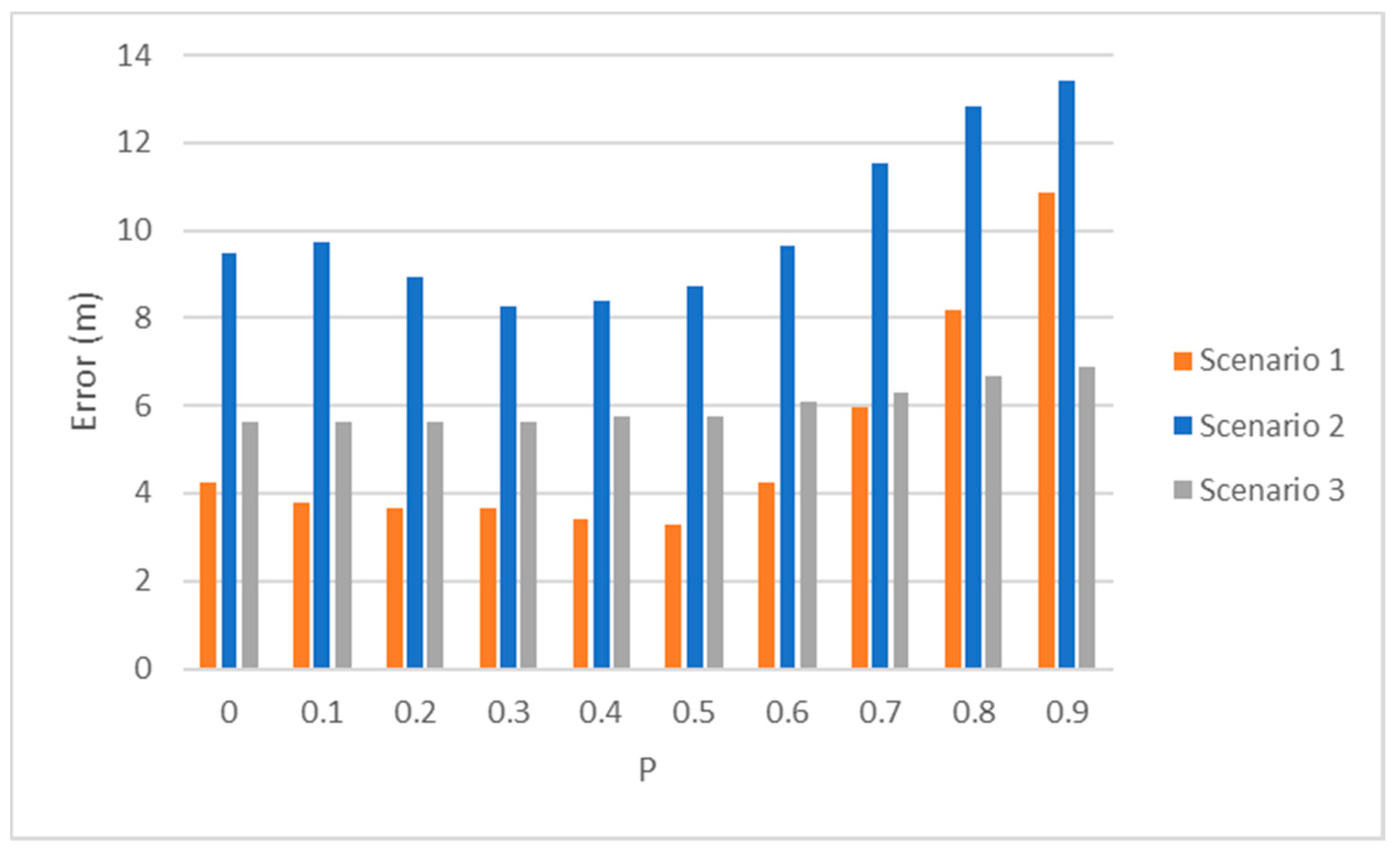
- Methodology for calculating distance: The simulator uses a more complex method for calculating the distance between nodes, as presented in Section 4.2.1, and the more accurate these distances are, the better the position obtained.
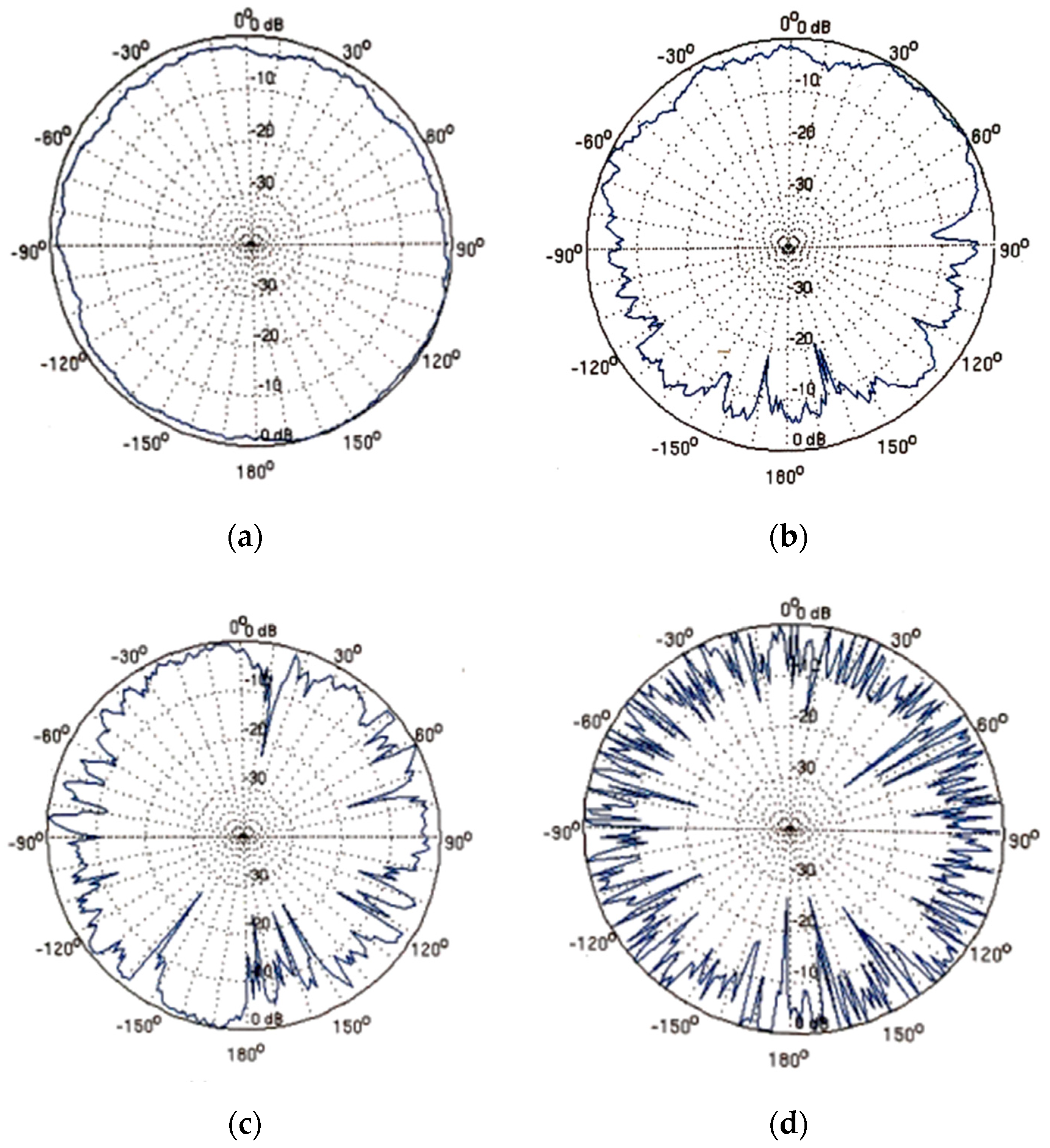
- Methodology to estimate the RSSI: The simulator estimates the RSSI values using the DOI model, where the RSSI variations follow a uniform random distribution. Nevertheless, that is not the case, since there are many propagation phenomena that are very difficult to estimate and simulate.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mainetti, L.; Patrono, L.; Vilei, A. Evolution of wireless sensor networks towards the Internet of Things: A survey. In Proceedings of the SoftCOM 2011, 19th International Conference on Software, Telecommunications and Computer Networks, Split, Croatia, 15–17 September 2011; pp. 1–6. [Google Scholar]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Han, G.; Xu, H.; Duong, T.Q.; Jiang, J.; Hara, T. Localization algorithms of Wireless Sensor Networks: A survey. Telecommun. Syst. 2013, 52, 2419–2436. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D.O. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Pandey, S.; Agrawal, P. A survey on localization techniques for wireless networks. J. Chin. Inst. Eng. 2006, 29, 1125–1148. [Google Scholar] [CrossRef]
- Alrajeh, N.A.; Bashir, M.; Shams, B. Localization Techniques in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2013, 9, 304628. [Google Scholar] [CrossRef]
- Mistry, H.P.; Mistry, N.H. RSSI Based Localization Scheme in Wireless Sensor Networks: A Survey. In Proceedings of the 2015 Fifth International Conference on Advanced Computing & Communication Technologies, Haryana, India, 21–22 February 2015; pp. 647–652. [Google Scholar]
- Oguejiofor, O.S.; Aniedu, A.; Ejiofor, H.C.; Okolibe, A.U. Trilateration Based localization Algorithm for Wireless Sensor Network. Int. J. Sci. Mod. Eng. 2013, 1, 12319–16386. [Google Scholar]
- Liu, C.; Wu, K.; He, T. Sensor localization with Ring Overlapping based on Comparison of Received Signal Strength Indicator. In Proceedings of the 2004 IEEE International Conference on Mobile Ad-hoc and Sensor Systems (IEEE Cat. No.04EX975), Fort Lauderdale, FL, USA, 25–27 October 2004; pp. 516–518. [Google Scholar]
- Cassano, E.; Florio, F.; De Rango, F.; Marano, S. A performance comparison between ROC-RSSI and trilateration localization techniques for WPAN sensor networks in a real outdoor testbed. In Proceedings of the 2009 Wireless Telecommunications Symposium, Prague, Czech Republic, 22–24 April 2009; pp. 1–8. [Google Scholar]
- Velimirovic, A.S.; Djordjevic, G.L.; Velimirovic, M.M.; Jovanovic, M.D. Fuzzy ring-overlapping range-free (FRORF) localization method for wireless sensor networks. Comput. Commun. 2012, 35, 1590–1600. [Google Scholar] [CrossRef]
- Paul, A.; Sato, T.; Paul, A.K.; Sato, T. Localization in Wireless Sensor Networks: A Survey on Algorithms, Measurement Techniques, Applications and Challenges. J. Sens. Actuator Netw. 2017, 6, 24. [Google Scholar] [CrossRef]
- Cai, X.; Wang, P.; Du, L.; Cui, Z.; Zhang, W.; Chen, J. Multi-objective 3-Dimensional DV-Hop Localization Algorithm with NSGA-II. IEEE Sens. J. 2019, 1. [Google Scholar] [CrossRef]
- Mukhopadhyay, B.; Sarangi, S.; Kar, S. Performance evaluation of localization techniques in wireless sensor networks using RSSI and LQI. In Proceedings of the 2015 Twenty First National Conference on Communications (NCC), Mumbai, India, 27 February–1 March 2015; pp. 1–6. [Google Scholar]
- Guvenc, I.; Chong, C.-C. A Survey on TOA Based Wireless Localization and NLOS Mitigation Techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Wielandt, S.; Van Nieuwenhuyse, A.; Goemaere, J.-P.; Nauwelaers, B.; De Strycker, L. Evaluation of angle of arrival estimation for localization in multiple indoor environments. In Proceedings of the 2014 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christ, TX, USA, 20–21 November 2014; pp. 36–43. [Google Scholar]
- Cheikhrouhou, O.; Bhatti, G.M.; Alroobaea, R. A Hybrid DV-Hop Algorithm Using RSSI for Localization in Large-Scale Wireless Sensor Networks. Sensors 2018, 18, 1469. [Google Scholar] [CrossRef] [PubMed]
- Sahu, P.K.; Wu, E.H.-K.; Sahoo, J. DuRT: Dual RSSI Trend Based Localization for Wireless Sensor Networks. IEEE Sens. J. 2013, 13, 3115–3123. [Google Scholar] [CrossRef]
- Wang, Y.; Ye, Q.; Cheng, J.; Wang, L. RSSI-Based Bluetooth Indoor Localization. In Proceedings of the 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 16–18 December 2015; pp. 165–171. [Google Scholar]
- Goldoni, E.; Prando, L.; Vizziello, A.; Savazzi, P.; Gamba, P. Experimental data set analysis of RSSI-based indoor and outdoor localization in LoRa networks. Internet Technol. Lett. 2019, 2, 75. [Google Scholar] [CrossRef]
- Passafiume, M.; Maddio, S.; Cidronali, A.; Passafiume, M.; Maddio, S.; Cidronali, A. An Improved Approach for RSSI-Based only Calibration-Free Real-Time Indoor Localization on IEEE 802.11 and 802.15.4 Wireless Networks. Sensors 2017, 17, 717. [Google Scholar] [CrossRef] [PubMed]
- Luo, X.; O’Brien, W.J.; Julien, C.L. Comparative evaluation of Received Signal-Strength Index (RSSI) based indoor localization techniques for construction jobsites. Adv. Eng. Inform. 2011, 25, 355–363. [Google Scholar] [CrossRef]
- Rodriguez-Zurrunero, R.; Utrilla, R.; Rozas, A.; Araujo, A.; Rodriguez-Zurrunero, R.; Utrilla, R.; Rozas, A.; Araujo, A. Process Management in IoT Operating Systems: Cross-Influence between Processing and Communication Tasks in End-Devices. Sensors 2019, 19, 805. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Chen, J.; Sun, Y. Grid Scan: A Simple and Effective Approach for Coverage Issue in Wireless Sensor Networks. In Proceedings of the 2006 IEEE International Conference on Communications, Istanbul, Turkey, 11–15 June 2006; pp. 3480–3484. [Google Scholar]
- Rodriguez-Zurrunero, R.; Utrilla, R.; Romero, E.; Araujo, A. An adaptive scheduler for real-time Operating Systems to extend WSN nodes lifetime. Wirel. Commun. Mob. Comput. 2018, 2018, 1–10. [Google Scholar] [CrossRef]
- Rodriguez-Zurrunero, R.; Tirado-Andres, F.; Araujo, A. YetiOS: An adaptive operating system for wireless sensor networks. In Proceedings of the 43rd Annual IEEE Conference on Local Computer Networks, LCN Workshops 2018, Chicago, IL, USA, 1–4 October 2019. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Distance between Positions (x-axis) | Distance between Positions (y-axis) | Number of Measures per Position |
|---|---|---|---|
| 1 | 1 m | 1 m | 10 |
| 2 | 1 m | 2 m | 100 |
| 3 | 1 m | 1 m | 100 |
| Scenario | Simulation with Squares (DOI = 0.1) | Simulation with Circles (DOI = 0.1) | Simulation with Circles (DOI = 0.2) | Simulation with Circles (DOI = 1) | Real Set-Up |
|---|---|---|---|---|---|
| 1 | 2.601 m | 2.535 m | 3.077 m | 4.857 m | 3.28 m |
| 2 | 5.182 m | 4.909 m | 6.736 m | 8.302 m | 8.73 m |
| 3 | 2.671 m | 2.515 m | 3.175 m | 4.088 m | 5.76 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pita, R.; Utrilla, R.; Rodriguez-Zurrunero, R.; Araujo, A. Experimental Evaluation of an RSSI-Based Localization Algorithm on IoT End-Devices. Sensors 2019, 19, 3931. https://doi.org/10.3390/s19183931
Pita R, Utrilla R, Rodriguez-Zurrunero R, Araujo A. Experimental Evaluation of an RSSI-Based Localization Algorithm on IoT End-Devices. Sensors. 2019; 19(18):3931. https://doi.org/10.3390/s19183931
Chicago/Turabian StylePita, Rosa, Ramiro Utrilla, Roberto Rodriguez-Zurrunero, and Alvaro Araujo. 2019. "Experimental Evaluation of an RSSI-Based Localization Algorithm on IoT End-Devices" Sensors 19, no. 18: 3931. https://doi.org/10.3390/s19183931
APA StylePita, R., Utrilla, R., Rodriguez-Zurrunero, R., & Araujo, A. (2019). Experimental Evaluation of an RSSI-Based Localization Algorithm on IoT End-Devices. Sensors, 19(18), 3931. https://doi.org/10.3390/s19183931