1. Introduction
Japan is facing an aging society, and it is important to respect senior citizens and to promote the creation of a prosperous city for all people. Meanwhile, vehicles driven by elderly people are considered to be risk factors, and traffic accidents caused by them have become a serious social problem in Japan [
1,
2]. Although people over 70 years old should attach signs that indicate elderly drivers to their cars in Japan, the detection of these signs is not necessarily easy. Moreover, vehicles cannot be detected if they are in non-line-of-sight (NLoS) areas from pedestrians. Therefore, a system to alert pedestrians should be desirable for pedestrians, especially for children, who tend to engage in unpredictable behaviors, and their associated parents or teachers.
This paper proposes a technique to detect an approaching vehicle in order to alert a pedestrian, especially at a residential area where the visibility of roads is very limited. Assuming a pedestrian is carrying a beacon device, the detection technique is carried out by the received signal strength indicator (RSSI) of the repeatedly radiated beacons, called alert beacons, from the vehicle’s device under multipath environment. In the proposed system, the approach of the target is detected by the Student’s t-test for a linear regression coefficient, i.e., the slope of the successive RSSI samples. Since the above passive method, in which the pedestrian’s device behaves only as a receiver, consumes much battery energy by opening the receiver window all the time, we further propose the neighbor-discovery-based (ND-based) method. In the ND-based method, the beacon called an advertising beacon, is first transmitted from the pedestrian’s device. Then the vehicle’s device returns an alert beacon when it receives the advertising beacon. Since the proposed technique does not require additional functions such as cloud servers or infrastructural facilities, an alert system for pedestrians could be realized cost-effectively.
Also, the detection error rate of the proposed technique with given parameters is theoretically analyzed.
Please note that this work is a substantial extension of our initial work [
3], in which the approach is detected only by the hard decision of the slope of RSSI samples with zero-thresholding in the framework of the passive method. Moreover, the detection was carried out at the vehicle side for a driver assistant system in the previous work. This paper employs a Student’s
t-test to enhance the reliability of the system. Moreover, the ND-based method is proposed to improve the detection performance by doubling the number of RSSI samples and contributes to reducing the device’s energy consumption, assuming that an approaching vehicle is detected at the pedestrian side.
The rest of this paper is organized as follows. In
Section 2, we review related work on collision avoidance systems and mobile speed estimation techniques.
Section 3 gives an overview of the proposed system based on the passive method.
Section 4 describes the proposed approach detection technique based on RSSI samples.
Section 5 introduces the ND-based method to double the number of RSSI samples employed for the detection. Numerical evaluations of the detection performance are given in
Section 6.
Section 7 introduces our prototype devices, and
Section 8 concludes this work.
2. Related Work
Vehicle-approach detection techniques based on radar scanner and visual imaging cameras are well-matured solutions for collision avoidance systems. There are a variety of proposals in the past literature, and they are well surveyed in [
4,
5,
6]. Keller et al. [
7] developed a vehicle control system that is integrated with pedestrian recognition by stereo vision trending to self-driving cars. Jeong et al. [
8] proposed a method to detect a pedestrian during summer nights by a far-infrared (FIR) camera on a vehicle. Such techniques are useful for alerting an
emergency hazard to the drivers. However, the application of the above systems is limited to situations where targets are directly visible from the vehicle. Moreover, there is a lack of a system that can alert a pedestrian side, not a vehicle side, in the literature.
TOYOTA has brought an intelligent transport system known as “ITS connect [
9]” to avoid the traffic accidents with pedestrians in blind spots or at poor-visibility intersections. In such a system, pedestrians crossing roads are detected by specific devices deployed around the intersections, and that information is notified to drivers. However, it would be difficult to build these comparatively expensive infrastructural systems widely in residential streets. Considering that the situation where pedestrians such as children or elderly people are keeping some beaconing devices for safe and secure purposes becomes common, especially, in Japan, the proposed system is much more feasible in terms of cost-effectiveness.
There are proposals to estimate the mobile speed and the direction based on the Doppler frequency of received signals, e.g., in [
10,
11,
12,
13]. Still, they require the physical layer level implementations, and thus they are difficult to be implemented in practical applications. Since obtaining RSSI in the upper layer is relatively easy, the applications to localization systems have attracted much attention [
14,
15,
16,
17]. However, they seem to be still challenging because they need to deploy more than one access point to estimate the correct location of the targets as well as the exact channel propagation characteristics. Nevertheless, if the goal is limited to detect the target approach assuming the target is carrying any beaconing device, the system should be in more practical, and there is no need to estimate channel propagation characteristics in the proposed system.To the best of our knowledge, our work is the first trial to employ RSSI for the approach detection of vehicles and pedestrians.
Although the global positioning system (GPS) would be helpful to implement the functions mentioned above, the devices would be more costly, and the obtained precision would get low under building shadow. Moreover, the system employing a GPS tend to consume battery energy more quickly; the current consumption by a typical GPS module is about 14.4 mA, and thus the battery life of the device becomes only about 15 h if we employ a coin battery with the capacity of 220 mAh [
18]. RSSI-based detection with the proposed ND-based method overcomes the issue of battery exhaustion, which will be described in
Section 7.
5. ND-Based Vehicle-Approach Detection
We have mentioned that there is a trade-off between the detection performance and the detection delay. The latter directly stems from the number of RSSI samples employed in the approach detection for a specific . This section describes a new scheme that can double the number of RSSI samples by applying the ND-based method to the approach detection scenario.
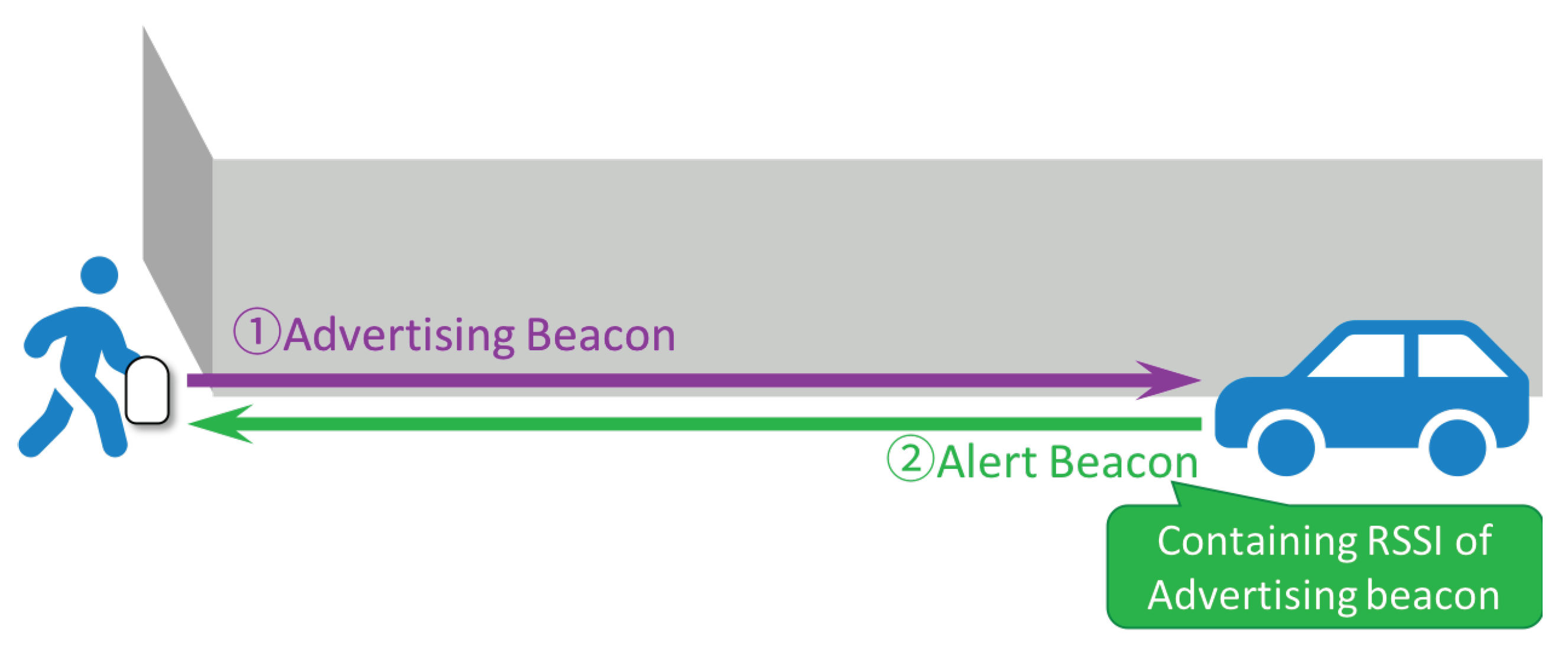
Figure 3 illustrates the proposed ND-based method. Unlike the passive method, the pedestrian’s device first transmits specific beacons, called
advertising beacons, repeatedly in every
seconds.
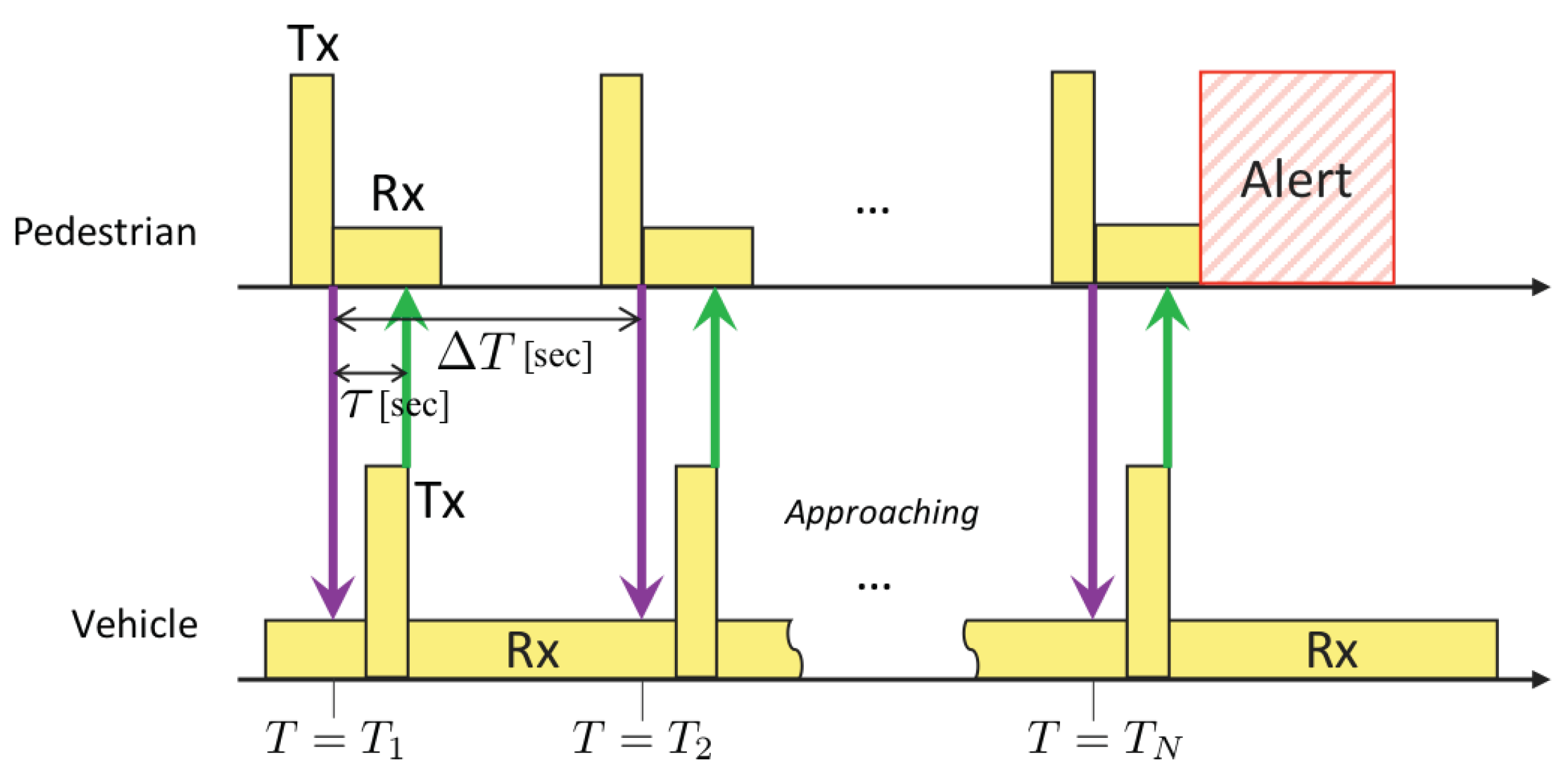
Once a vehicle receives an advertising beacon, it returns an alert beacon containing the RSSI value of the advertising beacon inside the payload of the packet. The vehicle returns alert beacons to the pedestrian side every time it receives advertising beacons.
We now denote that the total number of advertising beacons by M, which is equivalent to that of alert beacons. Since we can employ the RSSI values of both the advertising beacons and the alert beacons at the pedestrian side, the total number of RSSI samples can be doubled such that .
The initial time
, in this case, is defined by the time when a vehicle receives an advertising beacon for the first time. The response lag from the reception of an advertising beacon to the transmission of an alert beacon is denoted by
in seconds. The timestamp of the RSSI sample
can be represented by
for
. After receiving
M alert beacons responding to
M advertising beacons, the detection finishes at the time
. If the system detects an approaching vehicle, the system alerts the pedestrian. A sequence diagram of the above process is shown in
Figure 4.
The ND-based method also has the advantage of prolonging the battery life of the pedestrian’s device compared to the passive method. According to [
18],
instantaneous current consumption per beacon transmission is about 94.4
mAsec while the reception process
continuously consumes 5.4 mA, which is more dominant than that of the transmission process if the reception process lasts long. In the ND-based method, the device can open the receiver window only while it waits for an alert beacon such that we can limit the duration time of the reception process. As a consequence, the battery life of the ND-based method is seven times longer than that of the passive method. A more detailed analysis of the power consumption can be seen in [
18]. Although the ND-based method has a secondary advantage that we can also alert the driver side about the approaching pedestrian, this topic is beyond the scope of this paper.
6. Results
In practice, and v are random variables. The final goal of this study is to suitably design system parameters , , N and to accommodate typical values of and v. This section shows numerical results on several scenarios of and v.
Figure 5 shows the relationship between the detection error rate and the detection delay
for both passive and ND-based methods with any combinations of system parameters
, 0.5 and 1 s and
, 0.25 and 0.1. Each figure includes the results for the vehicle velocities
40, 20 and −40 km/h with
m. These parameters stem from the legal speeds for vehicles in residential areas and the communication range of beacons [
18]. The parameters related to the propagation model are set as
and
, and the response lag
in the ND-based method is set as
s. The simulation values are obtained by a Monte Carlo method, in which RSSI samples are generated randomly according to the PDF (
5). We also derived the theoretical error rate, which is described in the
Appendix A. The difference between the simulation values and the theoretical curves stems from the assumption in (
13), i.e., the mismatch between the true distribution of
and the Gaussian distribution. Please note that the results for
km/h and 20 km/h show the probability of Type-I errors and those for
km/h show the probability of Type-II errors.
It can be first shown in
Figure 5 that the detection error rate decreases as
increases in all cases; the performance is improved as the value of
N increases for any combination of
and
. However, we should remember that the more
increases, the closer the vehicle approaches to the pedestrian when
. It is also shown that the ND-based method is effective for reducing the detection error rate, and the detection delay can be shortened by almost one second to achieve the error rate of
in all cases.
When we compare the different values of
for a fixed
, e.g.,
Figure 5a–c, a trade-off can be seen between the probabilities of Type-I errors and Type-II errors; Type-I errors reduce as
decreases while Type-II errors increase. For variable
with a fixed
, e.g.,
Figure 5a,d,g, as
increases, the detection performance is degraded for all
v.
From the results in
Figure 5, one can see that the ND-based method with
s is the best option among the others, but the pedestrian’s device highly consumes battery energy in such a system. On the other hand, the system with
s increases the detection delay when compared to the same detection error rate level. For example, in the case that
km/h, the ND-based method with
and
achieves the detection error rate of
at
s, in which the distance between the vehicle and the pedestrian is
m. To achieve the equivalent level of the above detection error rate,
of 5.6 and 6.1 s are required for
s and 1 s.
Based on the above observations, we analyze the ND-based method with
s more in detail in what follows.
Figure 6 illustrates the relationship between the detection error rate and the vehicle velocity
v for the ND-based method with
s and various
M, i.e.,
, 11, 17 and 21, which correspond to
, 5.1, 8.1 and 10.1 s, respectively. The significance level
is set as 0.5, 0.4, 0.3 and 0.2 for
Figure 6a–d respectively. We again note that the results for
and
respectively correspond to the probabilities of Type-I errors and Type-II errors. As designed, we can see the detection error rate, or the probability of Type-II errors, for
km/h is equal to
.
The asymmetry of curves around the boundary of
km/h is observed in all figures. It is because the mean of RSSI varies in
order with respect to the distance
d as shown in (
A1) while
d changes linearly. Comparing
Figure 6b to
Figure 6a, i.e.,
to 0.5, the detection performance for
is improved. The effectiveness is much obvious around
km/h, while some degradation of the performance for
, i.e., the increase of the probability of Type-II errors, can be seen. This degradation is more significant as
decreases as shown in
Figure 6c,d. For example, when
km/h, the detection error rate for
is less than
in
Figure 6a–c, but it is almost equal to
in
Figure 6d.
We now assume is the allowable detection error rate for km/h. If we consider , the techniques with , 0.3 and 0.2 can achieve the detection error rate of . However, as we decrease , the probability of Type-II errors increases, as mentioned above. In this case, the ND-based method with becomes an appropriate design.
It turns out that it is challenging to determine M to a unique value since the performance fluctuates depending on the random variable v and . Nevertheless, the design of a stepwise detection and alert system could be still possible with several predefined values of M, which would be the most feasible and reliable application for our scenario.
8. Conclusions
This paper proposed an RSSI-based low-power vehicle-approach detection technique that alerts neighboring pedestrians. There are two approaches. A passive method applies a simple linear regression to estimate the slope of the RSSI samples and conducts a Student’s t-test from a limited number of received packets.
This paper also proposed the ND-based method that can significantly improve the detection performance by increasing the number of RSSI samples employed for the detection and reduce the power consumption of the pedestrian’s device.
The main findings of this paper are: (1) The ND-based method can shorten the detection delay by one second compared to the passive method to achieve the error rate of in all cases. (2) There is a trade-off between the Type-I error rate and the Type-II error rate depending on the significance level in the Student’s t-test. (3) The ND-based method with the significance level and the beacon interval s seems to be an appropriate design in the simulations, and the stepwise detection could be the most reasonable implementation for our scenario.
The proposed technique does not require any prior knowledge, such as the speed of vehicles, the distance between the pedestrian and the vehicle, and the channel information for beacons. Therefore, the proposed technique can be adapted to situations where these parameters randomly vary. The analysis for more realistic conditions and the evaluation of actual detection performance in real-field experiments using the prototype devices are left as our future work.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






