Development of an Open-Source Thermal Image Processing Software for Improving Irrigation Management in Potato Crops (Solanum tuberosum L.)

 ,
,  ,
, 
 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Plant Material and Study Area
2.2. Experimental Design and Crop Management
2.3. Image Acquisition and Analysis
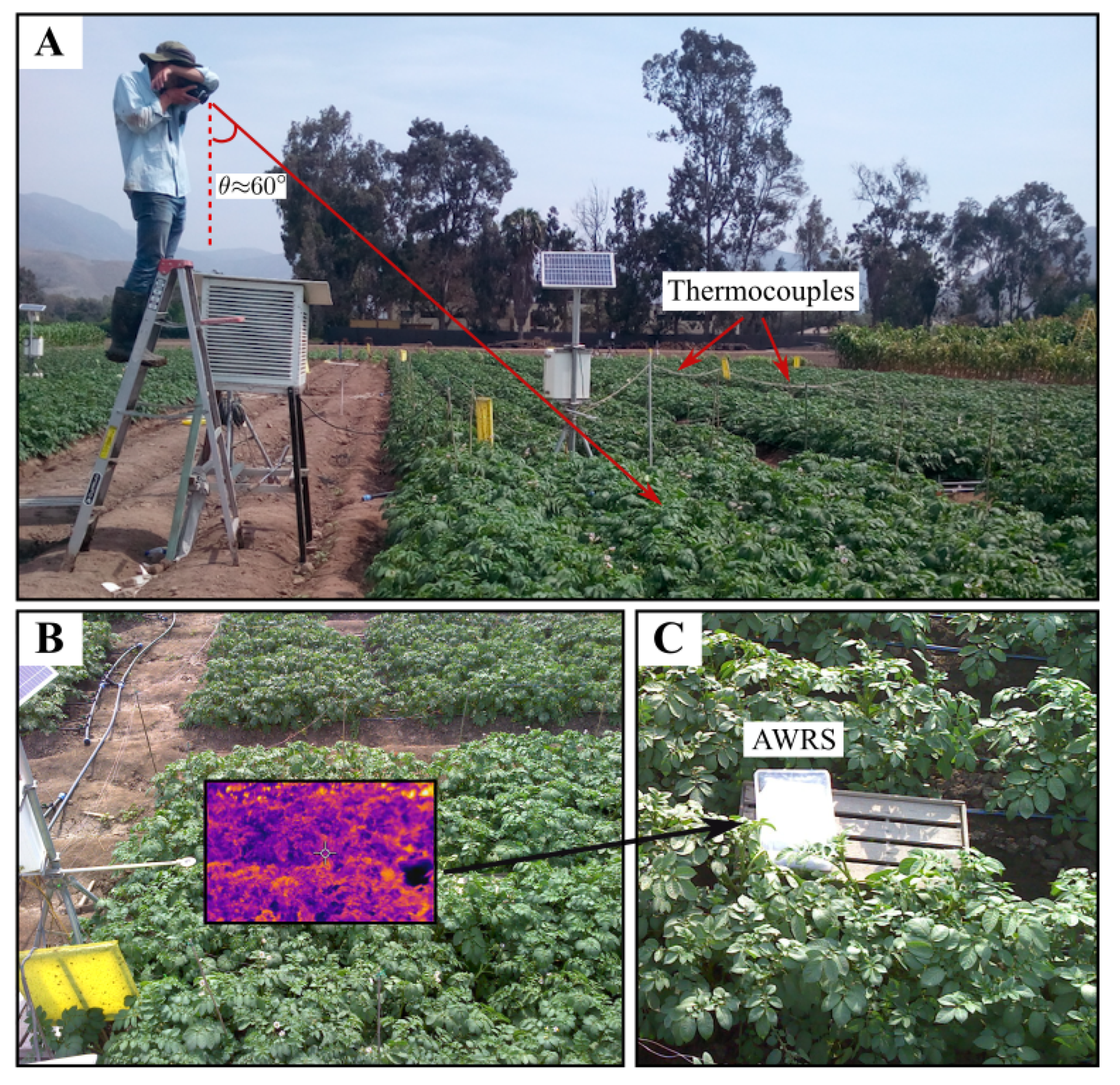
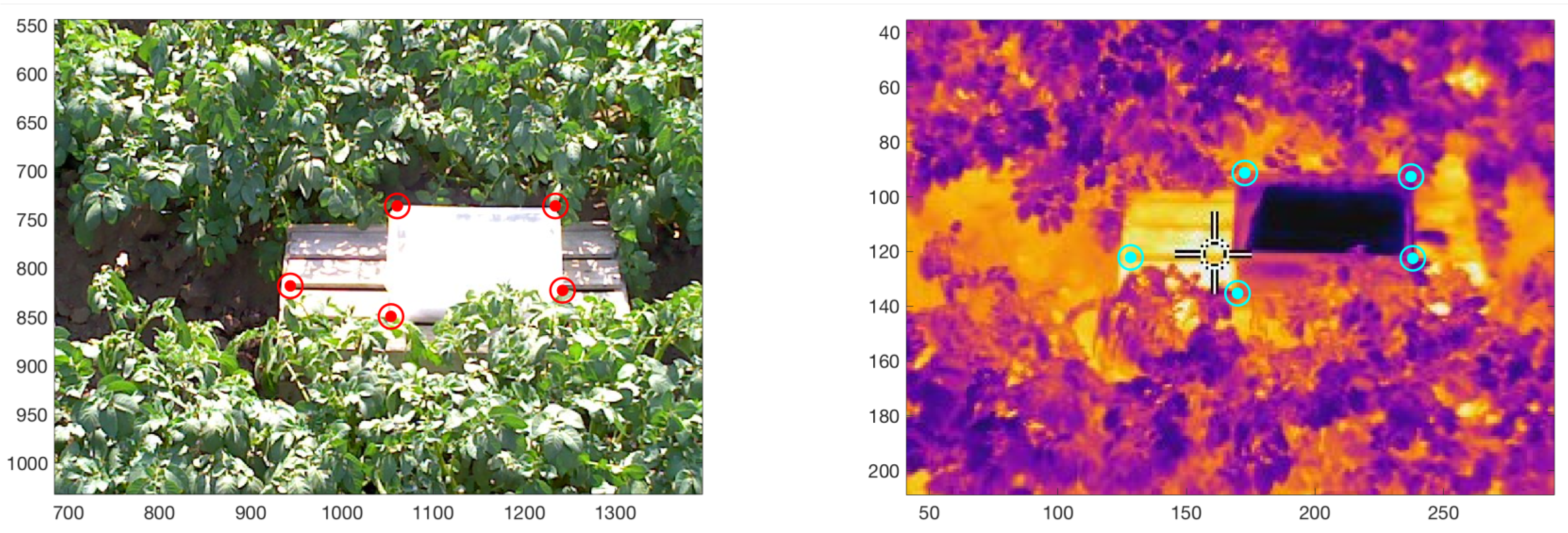
- Geometric Transformation: The IRT and RGB images acquired with the FLIR E60 camera have a horizontal and vertical displacement vector (units in pixels) due to the shift between both image sensor’s optics. In addition, there is an additional scaling factor (unitless) as a result of the different lenses’ FOV and the corresponding sensors’ spatial resolution (pixel quantity and size). Such parameters can be calculated a priori using a one-time calibration protocol based on the methodology described in [13]. Fifty pair of IRT and RGB images acquired with and m over the potato crop, and including the AWRS in the scene, were utilized for calibration. A MATLAB script was developed to allow the user to manually select correlated control points in both images through visual inspection, and consequently, provide averaged displacement vector and scaling factors (Figure 3). The presence of the AWRS in both images serves to locate additional control points due to its higher contrast (see Figure 3). The number of image pairs (50) helps overcome the inherent human error in the selection, and thus, reduce the measurement uncertainty. The resulting scaling factor is firstly applied to the RGB image (). Bi-linear interpolation in is allowed since it only serves to determine the canopy location in the scene. Then, the displacement vector is applied to the IRT image () with respect to . The coordinate origin is assumed to be the top left corner of . Furthermore, no scaling was applied, i.e., the interpolation process is carried out over to avoid altering the IRT sensor measurements. Figure 2 (Step 1) shows the resulting scaled and translated as a single false-color image, which also indicates the overlapping region to be analyzed.
- Color-Based Threshold Calculation: The green–red vegetation index (GRVI) is used to determine the presence of the potato canopy in the scene. As was thoroughly explained and assessed in [31], GRVI can serve as a threshold to determine the leaves’ location in an RGB image. After the geometric transformation procedure is performed, the overlapped region from the scaled RGB image is extracted; it is referred as from now on. Then, the GRVI is calculated for each pixel () using the following equation:where indicates the pixel located at the 2D coordinate in the layer (, and ). In [31], a value of = 0 can detect the early phase of leaf green-up over several forest species, such as deciduous broadleaf and deciduous coniferous, as well as grassland and a rice paddy field. In this study, additional experiments were conducted with the potato canopy, and it was found that a threshold value of can determine the presence of the potato canopy with a high level of accuracy when it is not affected by the crop senescence. Finally, the logical mask is generated and contains 1s when a given pixel yields a and 0 s otherwise.
- Morphological Operations: As a result of the linear interpolation of the RGB image , individual pixels do not conserve their spectral information, and the GRVI cannot detect them as part of the canopy, ultimately creating small holes (a group of 0s) in the mask M. For this reason, a set of mathematical morphological operations is used. First, dilation is applied to eliminate the noiselike structures over the potato canopy. Second, erosion is used to fully cover those regions that do not belong to the canopy, as shown in see Figure 2 (Step 3). Only those values with 1 s (white in the image) are used to calculated the averaged . Additionally, since the size of the image is fixed (320 × 240 pixels), a kernel size of 4 × 4 pixels was used for both operations. Finally, small regions with of the total mask area are removed.
- Correction with the FLIR Metadata and Average Temperature Calculation: The IRT image provided by FLIR E60 has units of Kelvin and its generation considers the total IR radiation that reached the detector during acquisition. Such radiation is composed of two components: the thermal radiation originated from the object and the radiation originating in the surroundings and reflected by the object. The fraction of the reflected radiation depends on the emissivity of the object , specifically, when , and should be removed from the measurement [7]. In order to perform the correction, the FLIR E60 provides the estimated total temperature in raw 16-bit format S and additional factory calibration parameters. Additionally, and [6,8] are utilized to estimate as follows:where , , F, O, and B are the so-called Planck calibration constants for FLIR cameras (and are set upon manufacturing), which can be extracted by the publicly-available EXIFTOOL application from the IRT image metadata. Furthermore, is the reflected temperature in Kelvin, is a 16-bit calculated value, S is the 16-bit raw value provided by the FLIR R60 camera, and is the object temperature in Kelvin. This procedure is performed for each pixel in the IRT image. Such values are then multiplied with the logical mask M and averaged to obtain the average canopy temperature . It is noteworthy that the noise likely induced by manual acquisition is highly reduced through the averaging of multiple pixels in five (5) IRT canopy images for a given treatment.
2.4. Response Variables
2.5. Statistical Analysis
3. Results
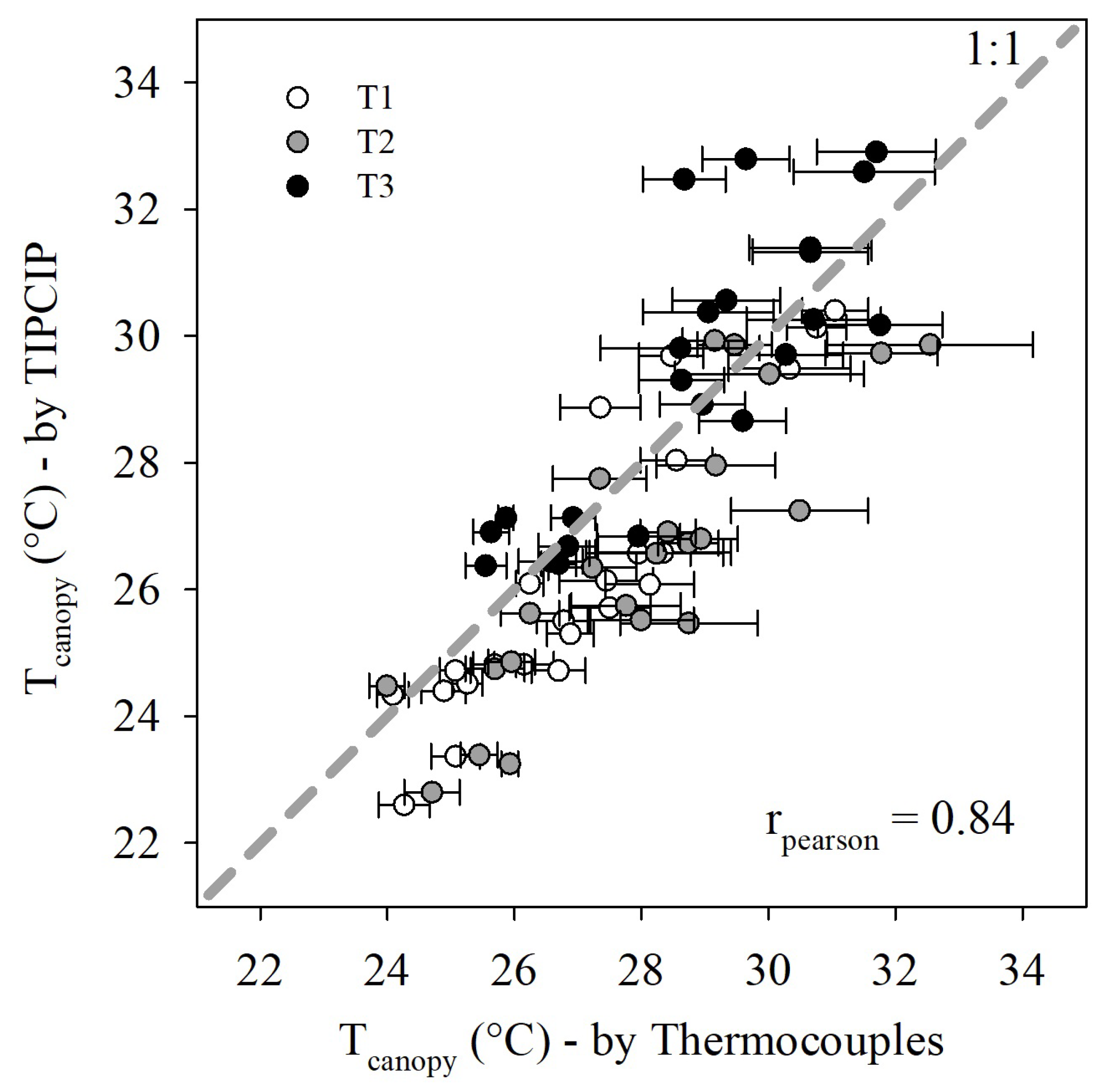
3.1. Accuracy of the Canopy Temperature Estimations
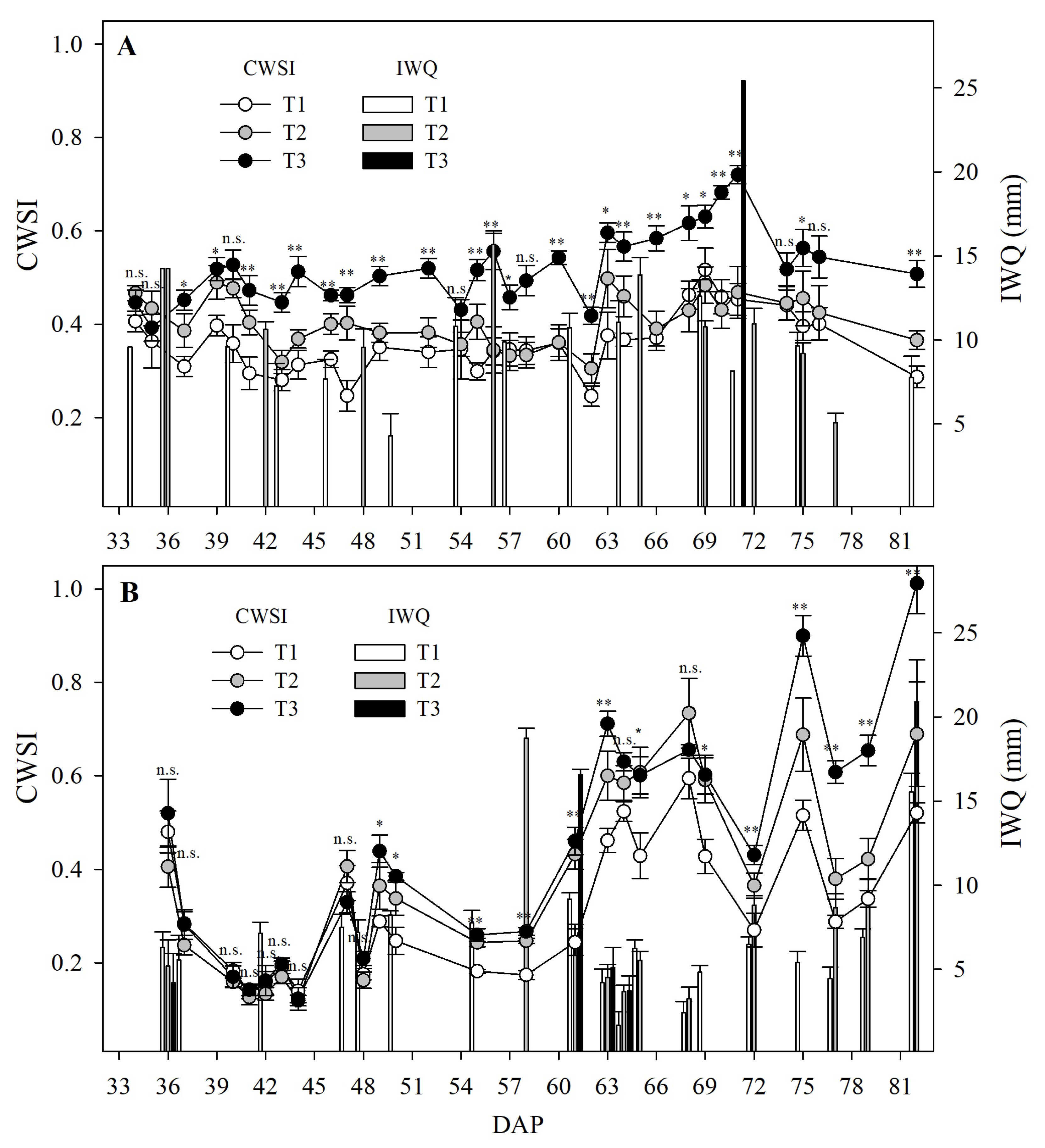
3.2. CWSI and Irrigation Treatments through the Growing Period
4. Discussion
4.1. Acquisition Configuration and Comparison with Instrumental Measurements
4.2. Thermography Usefulness for Irrigation Scheduling in Potato Crops in Humid Environments
4.3. Advantages and Disadvantages of the Developed Software (TIPCIP)
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kramer, P.J. 12—Water Deficits and Plant Growth. In Water Relations of Plants; Kramer, P.J., Ed.; Academic Press: Cambridge, MA, USA, 1983; pp. 342–389. [Google Scholar] [CrossRef]
- Steduto, P.; Hsiao, T.C.; Fereres, E.; Raes, D. Crop Yield Response to Water; FAO Irrigation and Drainage Paper 66; Food and Agriculture Organization of the United Nations: Rome, Italy, 2012. [Google Scholar]
- Medrano, H.; Escalona, J.M.; Bota, J.; Gulias, J.; Flexas, J. Regulation of Photosynthesis of C3 Plants in Response to Progressive Drought: Stomatal Conductance as a Reference Parameter. Ann. Bot. 2002, 89, 895–905. [Google Scholar] [CrossRef]
- Flexas, J.; Carriquí, M.; Coopman, R.E.; Gago, J.; Galmés, J.; Martorell, S.; Morales, F.; Diaz-Espejo, A. Stomatal and mesophyll conductances to CO2 in different plant groups: Underrated factors for predicting leaf photosynthesis responses to climate change? Plant Sci. 2014, 226, 41–48. [Google Scholar] [CrossRef]
- Flexas, J. Genetic improvement of leaf photosynthesis and intrinsic water use efficiency in C3 plants: Why so much little success? Plant Sci. 2016, 251, 155–161. [Google Scholar] [CrossRef]
- Ramírez, D.A.; Yactayo, W.; Rens, L.R.; Rolando, J.L.; Palacios, S.; Mendiburu, F.D.; Mares, V.; Barreda, C.; Loayza, H.; Monneveux, P.; et al. Defining biological thresholds associated to plant water status for monitoring water restriction effects: Stomatal conductance and photosynthesis recovery as key indicators in potato. Agric. Water Manag. 2016, 177, 369–378. [Google Scholar] [CrossRef]
- Jones, H.G. Application of Thermal Imaging and Infrared Sensing in Plant Physiology and Ecophysiology. In Incorporating Advances in Plant Pathology; Advances in Botanical Research; Academic Press: Cambridge, MA, USA, 2004; Volume 41, pp. 107–163. [Google Scholar] [CrossRef]
- Rinza, J.; Ramírez, D.A.; García, J.; de Mendiburu, F.; Yactayo, W.; Barreda, C.; Velasquez, T.; Mejía, A.; Quiroz, R. Infrared Radiometry as a Tool for Early Water Deficit Detection: Insights into Its Use for Establishing Irrigation Calendars for Potatoes Under Humid Conditions. Potato Res. 2019, 62, 109–122. [Google Scholar] [CrossRef] [Green Version]
- Food and Agriculture Organization of the United Nations Statistics Division (FAOSTAT). Available online: http://faostat.fao.org (accessed on 18 October 2019).
- Obidiegwu, J.; Bryan, G.; Jones, H.; Prashar, A. Coping with drought: Stress and adaptive responses in potato and perspectives for improvement. Front. Plant Sci. 2015, 6, 542. [Google Scholar] [CrossRef] [Green Version]
- Schafleitner, R.; Ramirez, J.; Jarvis, A.; Evers, D.; Gutierrez, R.; Scurrah, M. Adaptation of the Potato Crop to Changing Climates. In Crop Adaptation to Climate Change; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2011; Chapter 11; pp. 287–297. [Google Scholar] [CrossRef]
- Rud, R.; Cohen, Y.; Alchanatis, V.; Levi, A.; Brikman, R.; Shenderey, C.; Heuer, B.; Markovitch, T.; Dar, Z.; Rosen, C.; et al. Crop water stress index derived from multi-year ground and aerial thermal images as an indicator of potato water status. Prec. Agric. 2014, 15, 273–289. [Google Scholar] [CrossRef]
- Yang, M.D.; Su, T.C.; Lin, H.Y. Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors. Sensors 2018, 18, 2003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kozlowski, L.J.; Kosonocky, W.F. Infrared Detector Arrays In Handbook of Optics Volume I: Fundamentals, Techniques, and Design; McGraw Hill: New York, NY, USA, 1995; Chapter 23; ISBN 9780071498906. [Google Scholar]
- Dudzik, S.; Minkina, W. Infrared Thermography: Errors and Uncertainties; Wiley: Oxford, UK, 2009. [Google Scholar]
- Wang, H.; Yi, X.; Lai, J.; Li, Y. Fabricating Microbolometer Array on Unplanar Readout Integrated Circuit. Int. J. Infrared Millim. Waves 2005, 26, 751–762. [Google Scholar] [CrossRef]
- Wang, X.; Yang, W.; Wheaton, A.; Cooley, N.; Moran, B. Efficient registration of optical and IR images for automatic plant water stress assessment. Comput. Electron. Agric. 2010, 74, 230–237. [Google Scholar] [CrossRef]
- Jones, H.G.; Leinonen, I. Thermal Imaging for the Study of Plant Water Relations. J. Agric. Meteorol. 2003, 59, 205–217. [Google Scholar] [CrossRef] [Green Version]
- Pitarma, R.; Crisóstomo, J.; Ferreira, M.E. Contribution to Trees Health Assessment Using Infrared Thermography. Agriculture 2019, 9, 171. [Google Scholar] [CrossRef] [Green Version]
- Al-doski, J.; Mansor, S.; Shafri, H. Thermal Imaging For Pests Detecting—A Review. Int. J. Agric. For. Plant. 2016, 2, 10–30. [Google Scholar]
- Möller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of thermal and visible imagery for estimating crop water status of irrigated grapevine. J. Exp. Bot. 2006, 58, 827–838. [Google Scholar] [CrossRef] [Green Version]
- Meron, M.; Tsipris, J.; Orlov, V.; Alchanatis, V.; Cohen, Y. Crop water stress mapping for site-specific irrigation by thermal imagery and artificial reference surfaces. Prec. Agric. 2010, 11, 148–162. [Google Scholar] [CrossRef]
- Prashar, A.; Yildiz, J.; McNicol, J.W.; Bryan, G.J.; Jones, H.G. Infra-red Thermography for High Throughput Field Phenotyping in Solanum tuberosum. PLoS ONE 2013, 8, e65816. [Google Scholar] [CrossRef]
- Gutiérrez-Rosales, R.; Espinoza-Trelles, J.; Bonierbale, M. UNICA: Variedad Peruana para mercado fresco y papa frita con tolerancia y resistencia para condiciones climáticas adversas. Rev. Latinoam. De La Papa 2007, 14, 41–50. [Google Scholar]
- Servicio Nacional de Meteorolgía e Hidrología (SENAMHI). Available online: https://www.senamhi.gob.pe/ (accessed on 1 October 2019).
- Ramírez, D.; Rolando, J.; Yactayo, W.; Monneveux, P.; Mares, V.; Quiroz, R. Improving potato drought tolerance through the induction of long-term water stress memory. Plant Sci. 2015, 238, 26–32. [Google Scholar] [CrossRef]
- Jones, H.G.; Serraj, R.; Loveys, B.R.; Xiong, L.; Wheaton, A.; Price, A.H. Thermal infrared imaging of crop canopies for the remote diagnosis and quantification of plant responses to water stress in the field. Funct. Plant Biol. 2009, 36, 978–989. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.G. Use of infrared thermometry for estimation of stomatal conductance as a possible aid to irrigation scheduling. Agric. For. Meteorol. 1999, 95, 139–149. [Google Scholar] [CrossRef]
- Meron, M.; Tsipris, J.; Charitt, D. Remote mapping of crop water status to assess spatial variability of crop stress. In Precision Agriculture. Proceedings of the 4th European Conference on Precision Agriculture, Berlin, Germany, 15–19 June 2003; Academic Publishers: Berlin, Germany, 2003; pp. 405–410. [Google Scholar]
- Cohen, Y.; Alchanatis, V.; Meron, M.; Saranga, Y.; Tsipris, J. Estimation of leaf water potential by thermal imagery and spatial analysis. J. Exp. Bot. 2005, 56, 1843–1852. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Motohka, T.; Nasahara, K.N.; Oguma, H.; Tsuchida, S. Applicability of Green-Red Vegetation Index for Remote Sensing of Vegetation Phenology. Remote Sens. 2010, 2, 2369–2387. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Horiguchi, I.; Machimura, T. Emissivities in the Window Region for Plant Canopies and its Effects of Plant Cover Ratio and Others. J. Agric. Meteorol. 1994, 50, 177–183. [Google Scholar] [CrossRef] [Green Version]
- Usamentiaga, R.; Venegas, P.; Guerediaga, J.; Vega, L.; Molleda, J.; Bulnes, F.G. Infrared Thermography for Temperature Measurement and Non-Destructive Testing. Sensors 2014, 14, 12305–12348. [Google Scholar] [CrossRef] [Green Version]
- Ehleringer, J.R. Temperature and energy budgets. In Plant Physiological Ecology: Field Methods and Instrumentation; Pearcy, R.W., Ehleringer, J.R., Mooney, H.A., Rundel, P.W., Eds.; Springer: Dordrchte, The Netherlands, 2000; pp. 117–135. [Google Scholar] [CrossRef]
- R Core Team. R Foundation for Statistical Computing. Vienna, Austria. Available online: http://www.R-project.org/ (accessed on 13 January 2020).
- Luquet, D.; Vidal, A.; Dauzat, J.; Bégué, A.; Olioso, A.; Clouvel, P. Using directional TIR measurements and 3D simulations to assess the limitations and opportunities of water stress indices. Remote Sens. Environ. 2004, 90, 53–62. [Google Scholar] [CrossRef]
- Prashar, A.; Jones, H. Infra-Red Thermography as a high-throughput tool for field phenotyping. Agronomy 2014, 4, 397–417. [Google Scholar] [CrossRef]
- Jones, H.; Sirault, X. Scaling of thermal images at different spatial resolution: The mixed pixel problem. Agronomy 2014, 4, 380–396. [Google Scholar] [CrossRef] [Green Version]
- Erdem, T.; Halim Orta, A.; Erdem, Y.; Okursoy, H. Crop water stress index for potato under furrow and drip irrigation systems. Potato Res. 2005, 48, 49–58. [Google Scholar] [CrossRef]
- Zaninelli, P.G.; Menéndez, C.G.; Falco, M.; López-Franca, N.; Carril, A.F. Future hydroclimatological changes in South America based on an ensemble of regional climate models. Clim. Dyn. 2019, 52, 819–830. [Google Scholar] [CrossRef]
- Walter, H.; Breckle, S.W. The Peruvian-Chilean Desert. In Ecological Systems of the Geobiosphere: 2 Tropical and Subtropical Zonobiomes; Springer: Berlin/Heidelberg, Germany, 1986; pp. 262–273. [Google Scholar] [CrossRef]
- Schemenauer, R.S.; Cereceda, P. Meteorological conditions at a coastal fog collection site in Peru. Atmosfera 1993, 6, 175–188. [Google Scholar]
- Rundel, P.W.; Dillon, M.O.; Palma, B.; Mooney, H.A.; Gulmon, S.; Ehleringer, J. The Phytogeography and Ecology of the Coastal Atacama and Peruvian Deserts. Aliso J. Syst. Evol. Bot. 1991, 13, 1–49. [Google Scholar] [CrossRef] [Green Version]
- Bowen, W.T. Water Productivity and Potato Cultivation. In Water Productivity in Agriculture: Limits and Opportunities for Improvement; Kijne, J., Barker, R., Molden, D., Eds.; CABI: Cambridge, MA, USA, 2003. [Google Scholar]
- SENAMHI. Regionalización Estadística de Escenarios Climáticos en Perú; AMICAF: Miraflores, Peru, 2014; pp. 1–24. [Google Scholar]
- Cucho, G.; Palacios, S.; Loayza, H.; Rinza, J.; Ramirez, D. Thermal Images Processor (TIPCIP); International Potato Center: Lima, Peru, 2018. [Google Scholar] [CrossRef]
- Cucho, G.; Palacios, S.; Loayza, H.; Rinza, J.; Ramirez, D. TIPCIP Software V1.3 Source Code; International Potato Center: Lima, Peru, 2019. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| October | November | December | January | |
|---|---|---|---|---|
| Minimum Temperature (°C) | 14.6 ± 0.08 | 15.4 ± 0.19 | 17.5 ± 0.18 | 19.7 ± 0.10 |
| Maximum Temperature (°C) | 21.5 ± 0.27 | 22.2 ± 0.26 | 24.1 ± 0.32 | 27.5 ± 0.21 |
| Average Temperature (°C) | 16.8 ± 0.13 | 17.8 ± 0.18 | 20.0 ± 0.22 | 22.7 ± 0.13 |
| Relative Humidity (%) | 83.4 ± 0.49 | 80.6 ± 0.54 | 81.0 ± 0.73 | 74.4 ± 0.66 |
| Solar Radiation (MJ m−2 day−1) | 17.2 ± 0.63 | 15.9 ± 0.73 | 14.4 ± 0.95 | 18.5 ± 0.65 |
| Average VPD (kPa) | 0.35 ± 0.01 | 0.42 ± 0.01 | 0.48 ± 0.03 | 0.76 ± 0.03 |
| Maximum VPD (kPa) | 0.84 ± 0.03 | 0.92 ± 0.03 | 0.99 ± 0.05 | 1.51 ± 0.05 |
| June | July | August | September | |
|---|---|---|---|---|
| Minimum Temperature (°C) | 14.8 ± 0.09 | 14.4 ± 0.06 | 13.9 ± 0.07 | 14.3 ± 0.08 |
| Maximum Temperature (°C) | 17.8 ± 0.28 | 18.6 ± 0.37 | 18.9 ± 0.27 | 20.4 ± 0.28 |
| Average Temperature (°C) | 15.8 ± 0.09 | 15.7 ± 0.10 | 15.5 ± 0.10 | 16.3 ± 0.11 |
| Relative Humidity (%) | 85.9 ± 0.56 | 84.9 ± 0.61 | 82.5 ± 0.64 | 80.2 ± 0.59 |
| Solar Radiation (MJ m−2 day−1) | 3.2 ± 0.38 | 5.2 ± 0.53 | 7.5 ± 0.66 | 10.7 ± 0.68 |
| Average VPD (kPa) | 0.26 ± 0.01 | 0.28 ± 0.01 | 0.32 ± 0.01 | 0.39 ± 0.01 |
| Maximum VPD (kPa) | 0.47 ± 0.03 | 0.58 ± 0.05 | 0.68 ± 0.04 | 0.85 ± 0.04 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cucho-Padin, G.; Rinza, J.; Ninanya, J.; Loayza, H.; Quiroz, R.; Ramírez, D.A. Development of an Open-Source Thermal Image Processing Software for Improving Irrigation Management in Potato Crops (Solanum tuberosum L.). Sensors 2020, 20, 472. https://doi.org/10.3390/s20020472
Cucho-Padin G, Rinza J, Ninanya J, Loayza H, Quiroz R, Ramírez DA. Development of an Open-Source Thermal Image Processing Software for Improving Irrigation Management in Potato Crops (Solanum tuberosum L.). Sensors. 2020; 20(2):472. https://doi.org/10.3390/s20020472
Chicago/Turabian StyleCucho-Padin, Gonzalo, Javier Rinza, Johan Ninanya, Hildo Loayza, Roberto Quiroz, and David A. Ramírez. 2020. "Development of an Open-Source Thermal Image Processing Software for Improving Irrigation Management in Potato Crops (Solanum tuberosum L.)" Sensors 20, no. 2: 472. https://doi.org/10.3390/s20020472
APA StyleCucho-Padin, G., Rinza, J., Ninanya, J., Loayza, H., Quiroz, R., & Ramírez, D. A. (2020). Development of an Open-Source Thermal Image Processing Software for Improving Irrigation Management in Potato Crops (Solanum tuberosum L.). Sensors, 20(2), 472. https://doi.org/10.3390/s20020472