Author Contributions
Conceptualization, C.-L.C. and S.-T.C.; methodology, C.-L.C.; software, Y.-C.J.; validation, C.-L.C., S.-T.C., and C.-Y.C.; formal analysis, S.-T.C.; investigation, Y.-C.J.; resources, Y.-C.J.; data curation, C.-Y.C.; writing—original draft preparation, S.-T.C.; writing—review and editing, S.-T.C.; visualization, C.-Y.C.; supervision, C.-Y.C.; project administration, C.-Y.C.; funding acquisition, C.-Y.C. All authors have read and agreed to the published version of the manuscript.
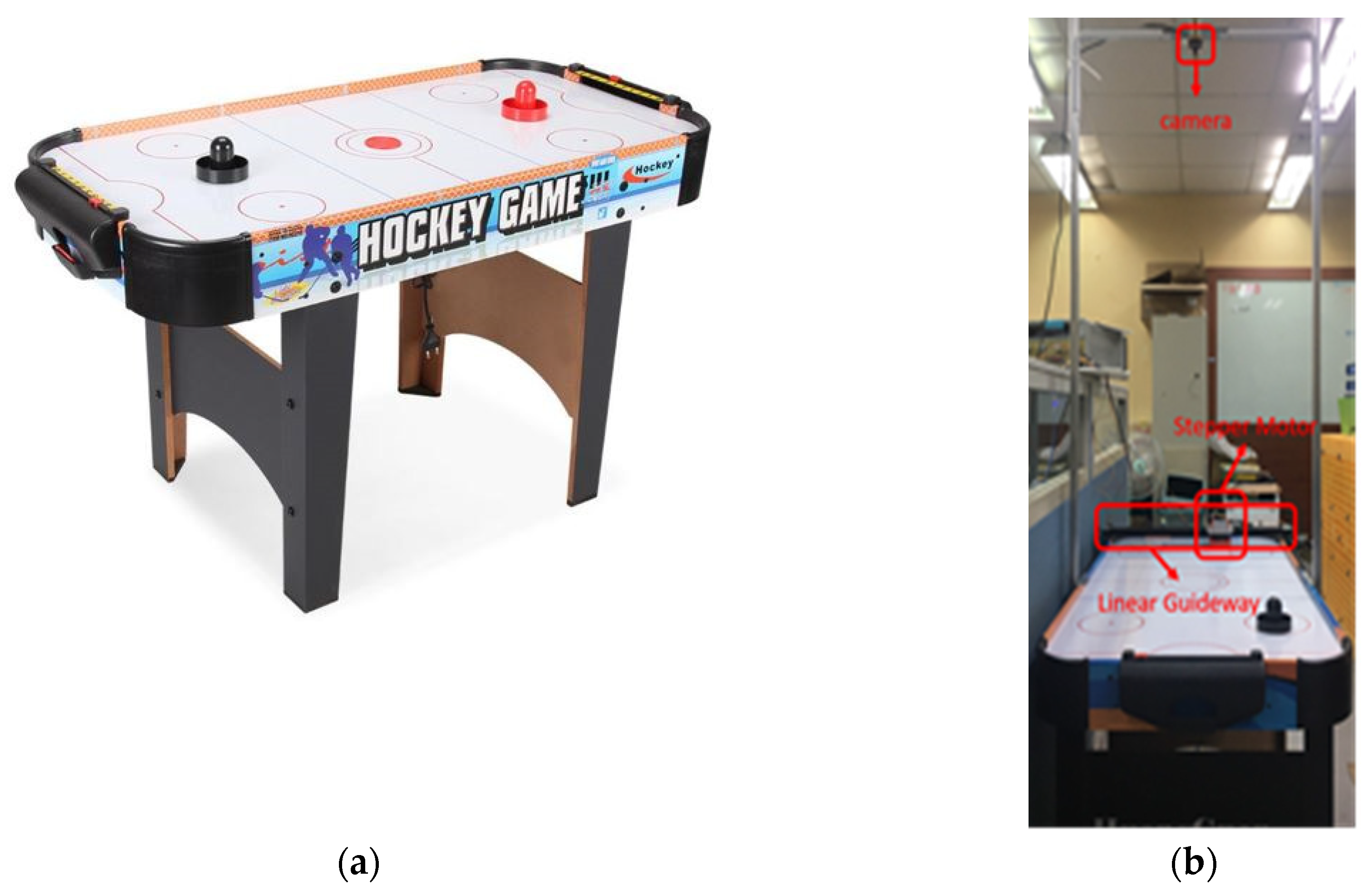
Figure 1.
(a) Full picture of an air hockey table. (b) The air hockey table is set up with a stepper motor, a linear guideway, and a camera above.
Figure 1.
(a) Full picture of an air hockey table. (b) The air hockey table is set up with a stepper motor, a linear guideway, and a camera above.
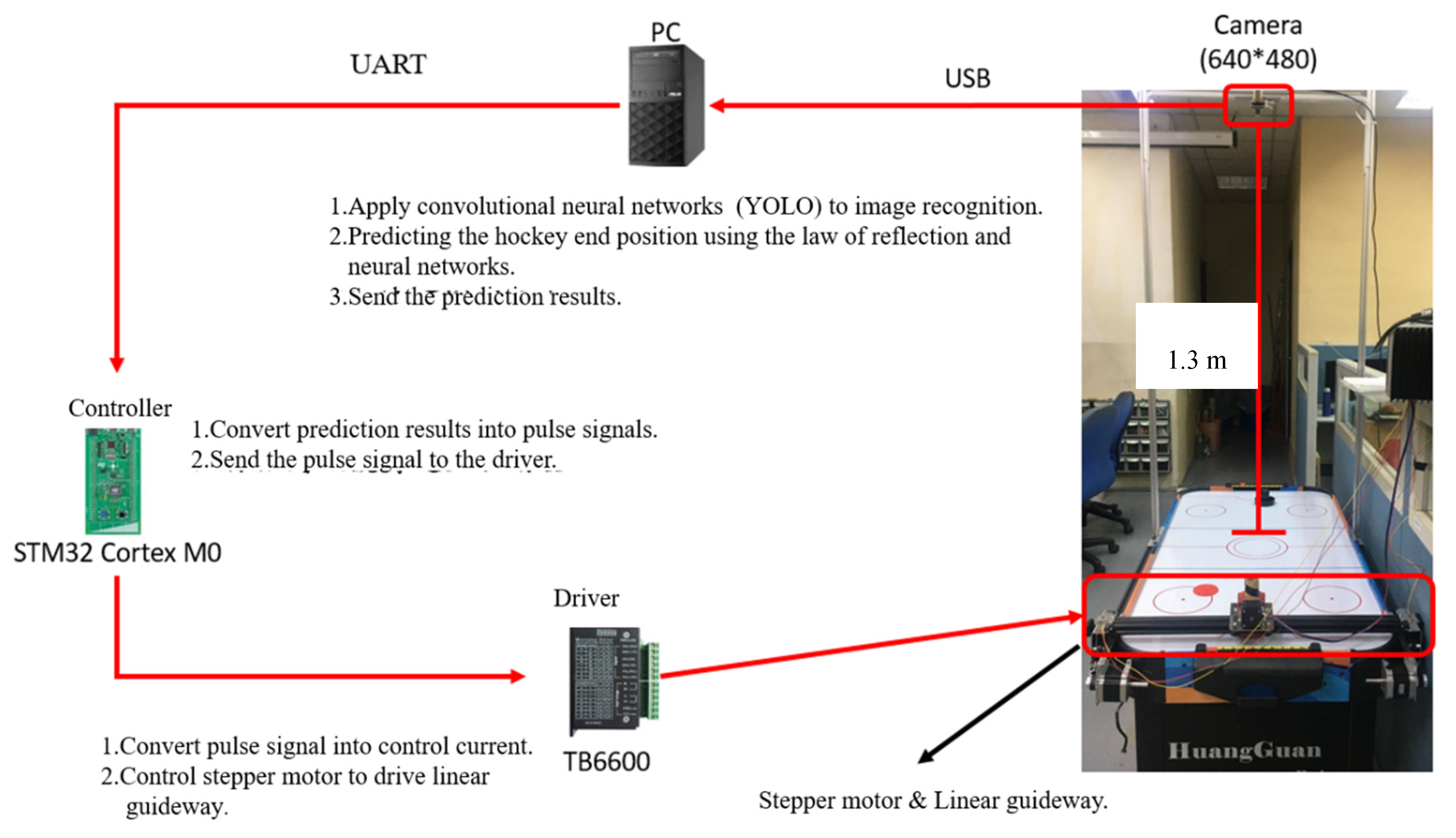
Figure 2.
Diagram of system architecture deployment.
Figure 2.
Diagram of system architecture deployment.
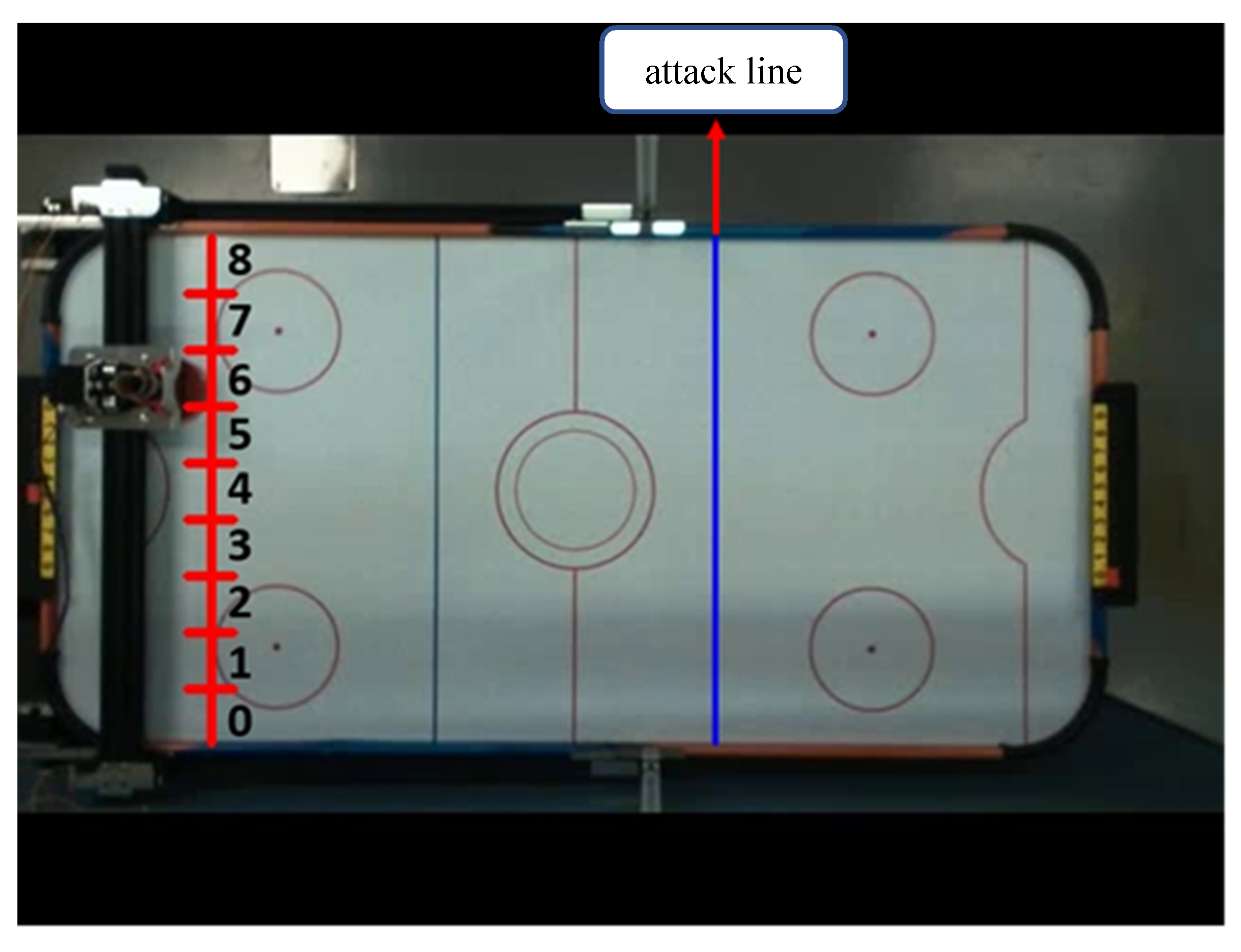
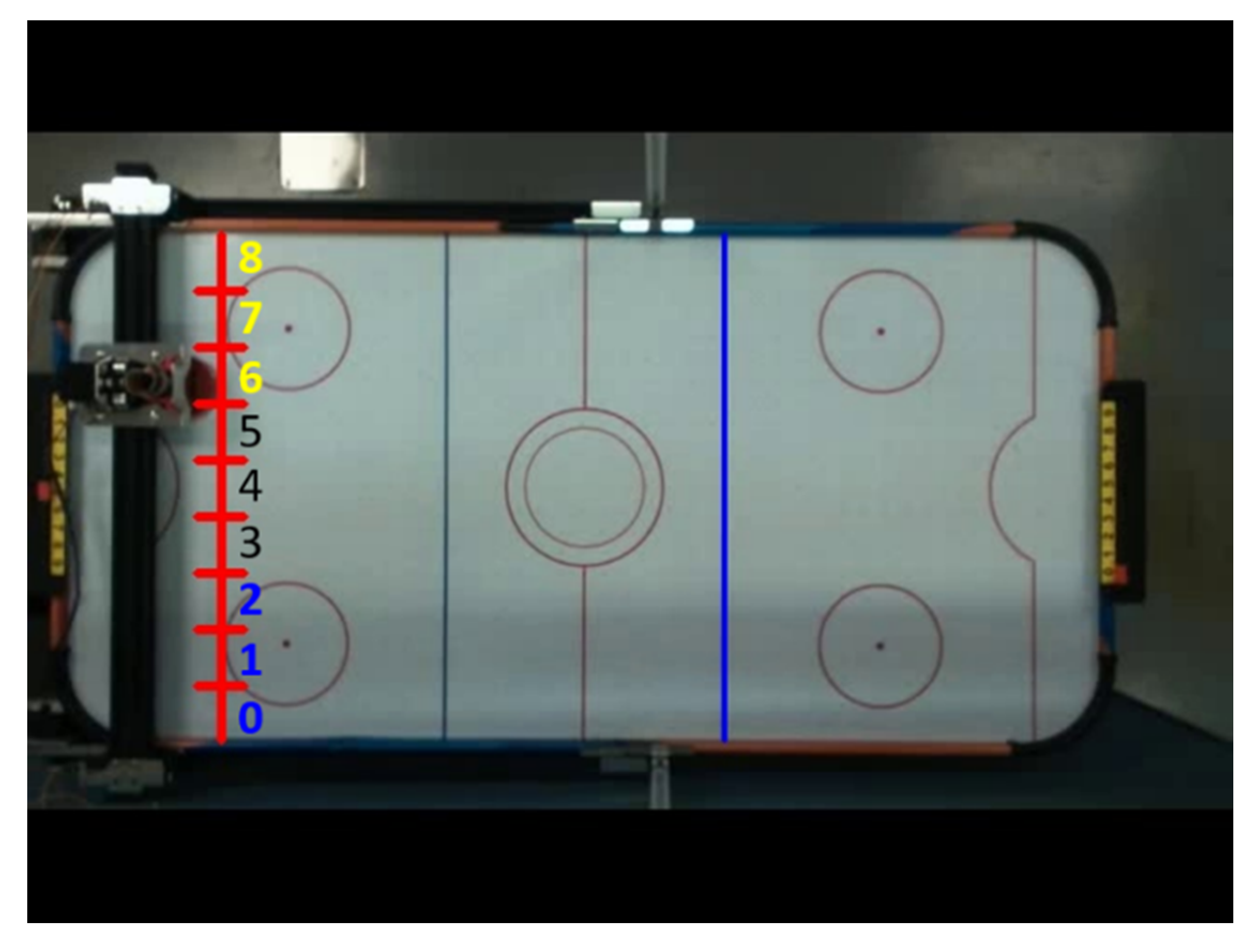
Figure 3.
Schematic diagram of defense area of system implementation method 1.
Figure 3.
Schematic diagram of defense area of system implementation method 1.
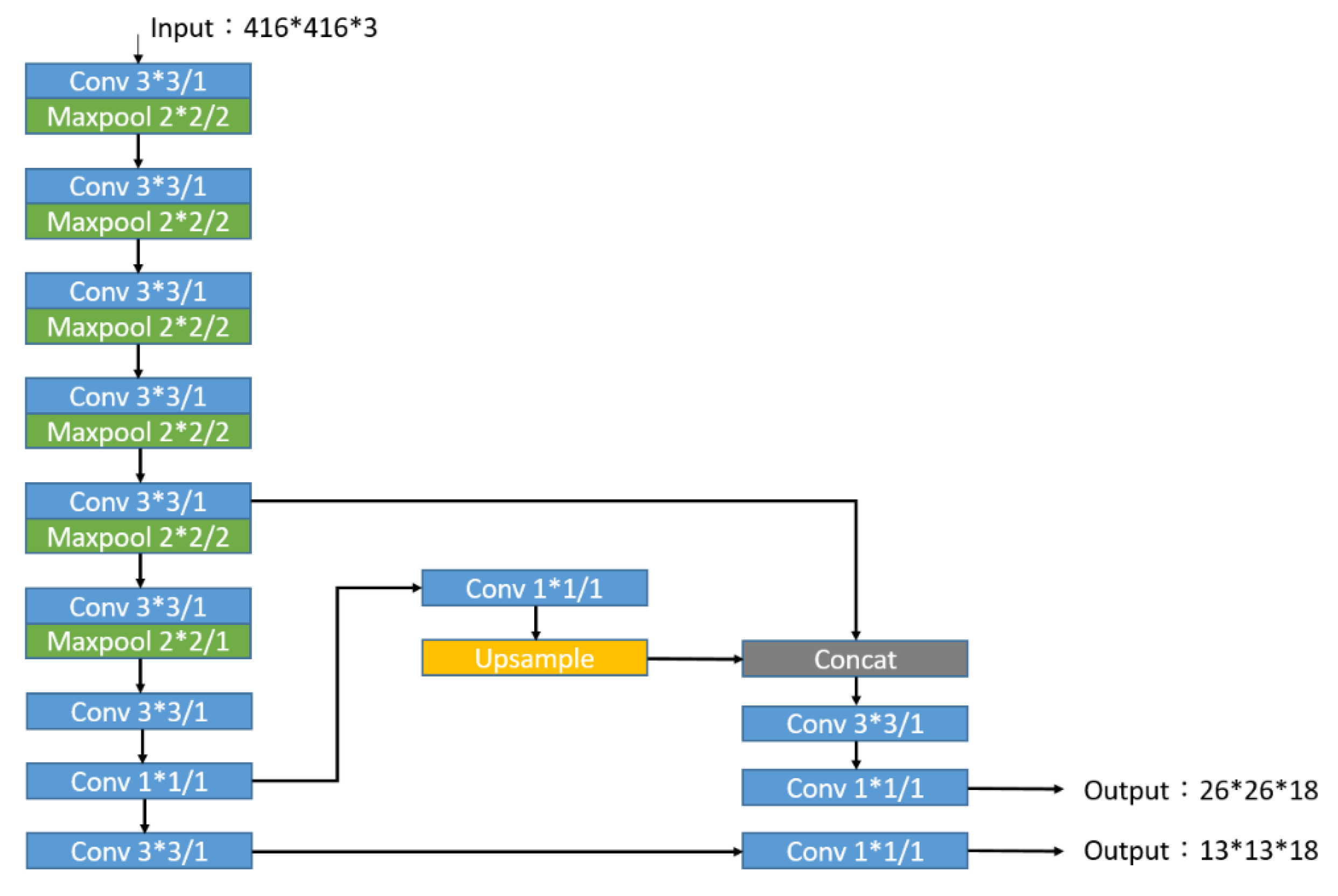
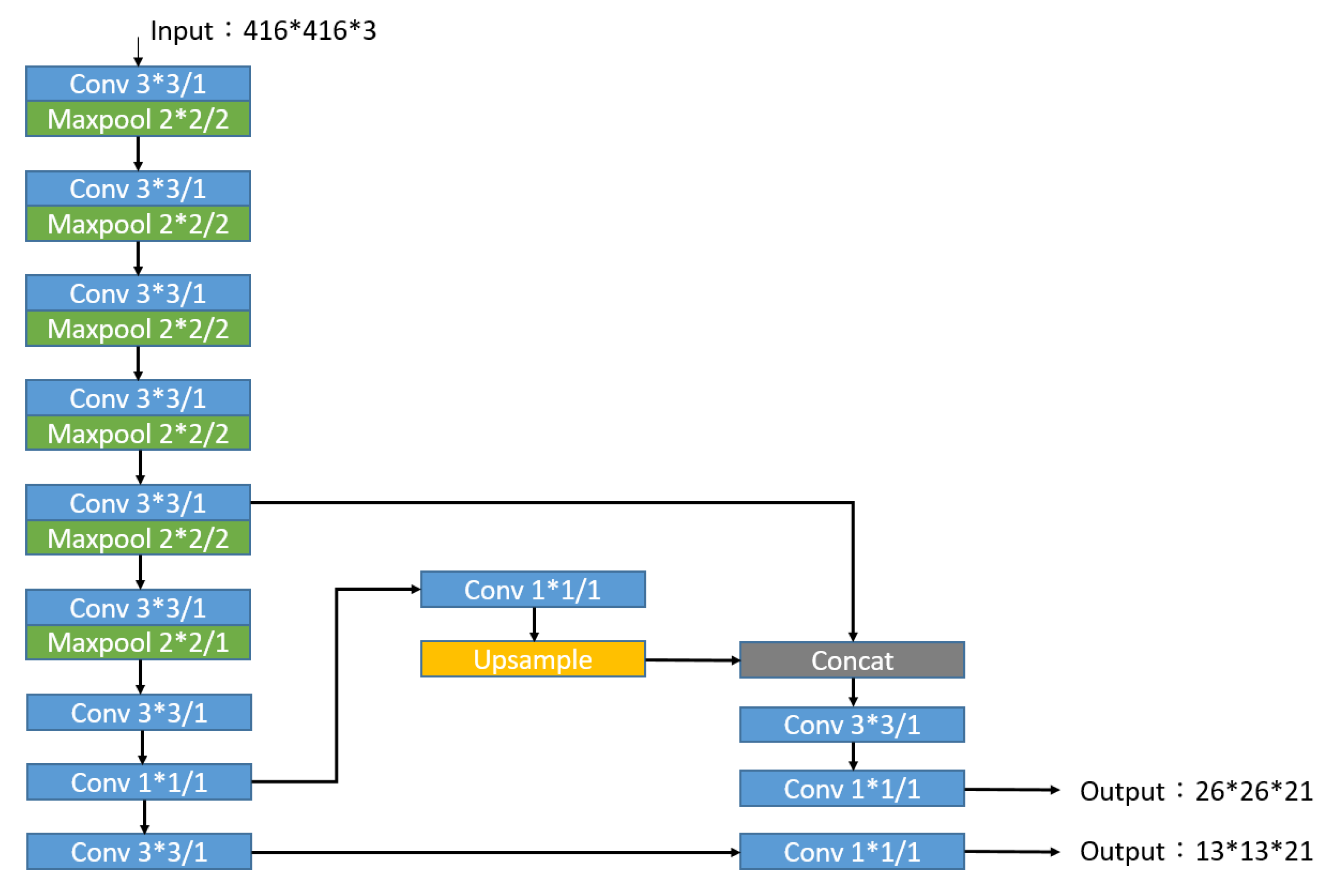
Figure 4.
Tiny-YOLOv3 network architecture in method 1.
Figure 4.
Tiny-YOLOv3 network architecture in method 1.
Figure 5.
Image of hockey moving slowly.
Figure 5.
Image of hockey moving slowly.
Figure 6.
Image of hockey moving fast.
Figure 6.
Image of hockey moving fast.
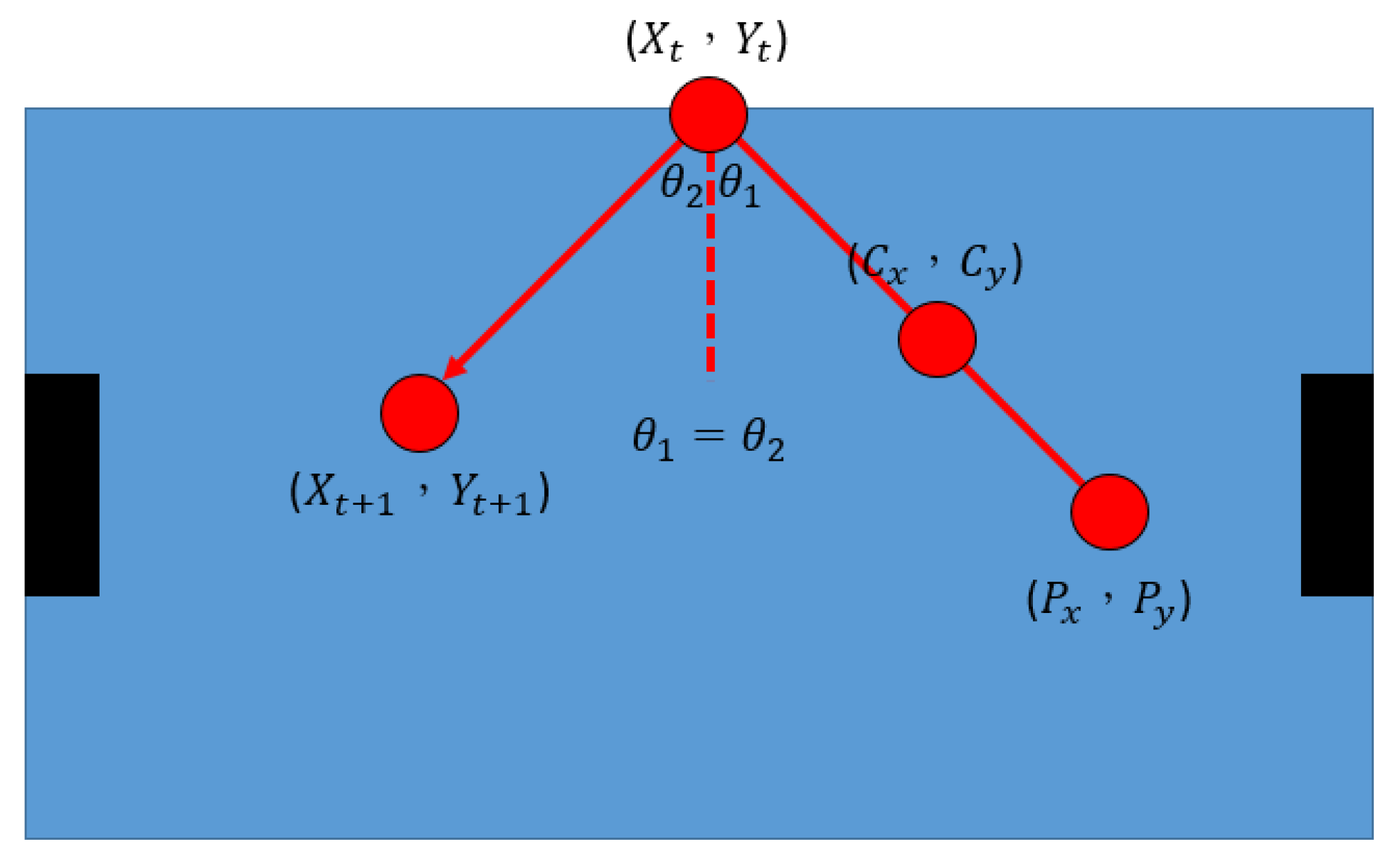
Figure 7.
Schematic diagram of linear formula combined with the law of reflection.
Figure 7.
Schematic diagram of linear formula combined with the law of reflection.
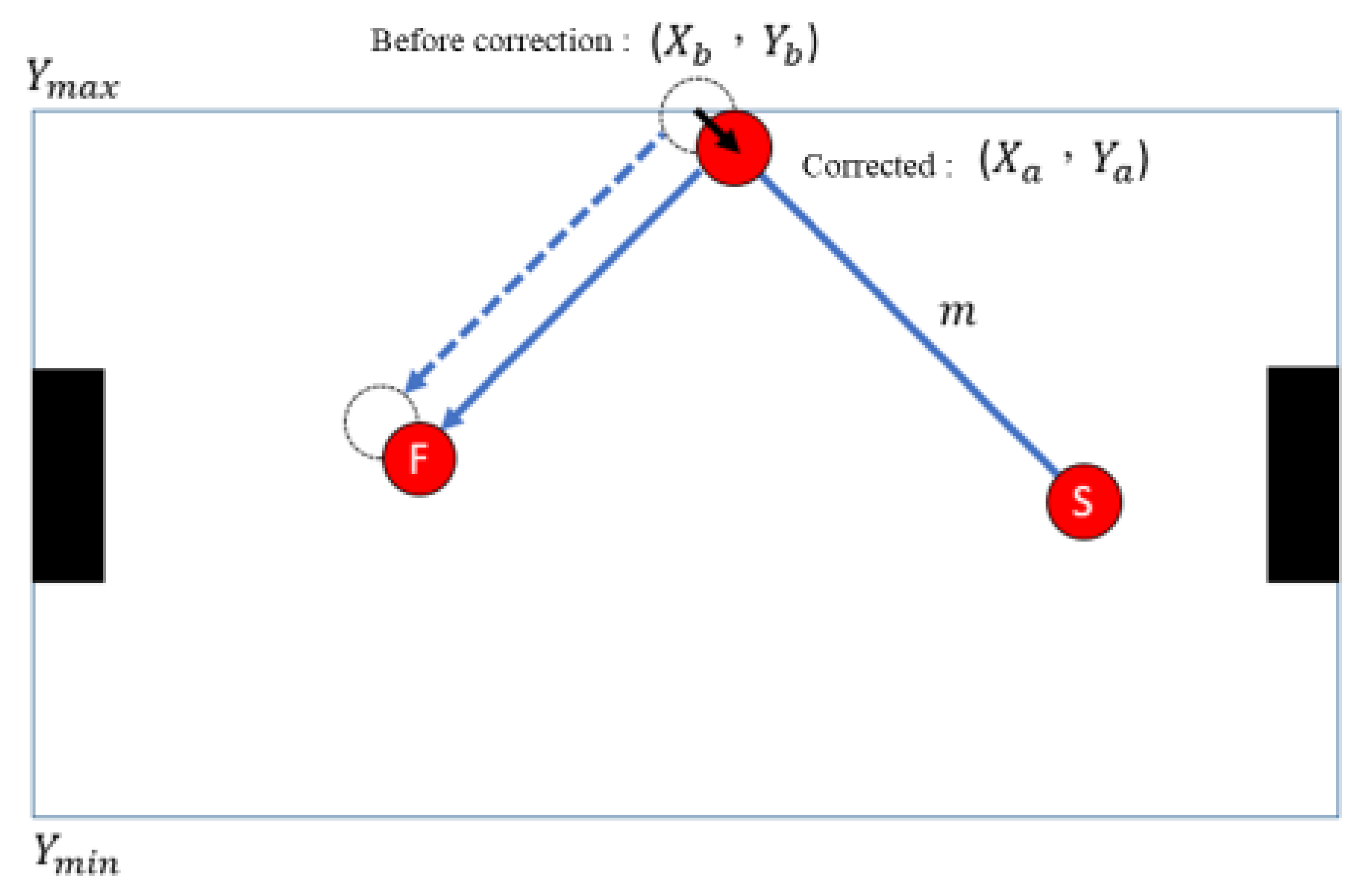
Figure 8.
Schematic diagram of correcting impact point.
Figure 8.
Schematic diagram of correcting impact point.
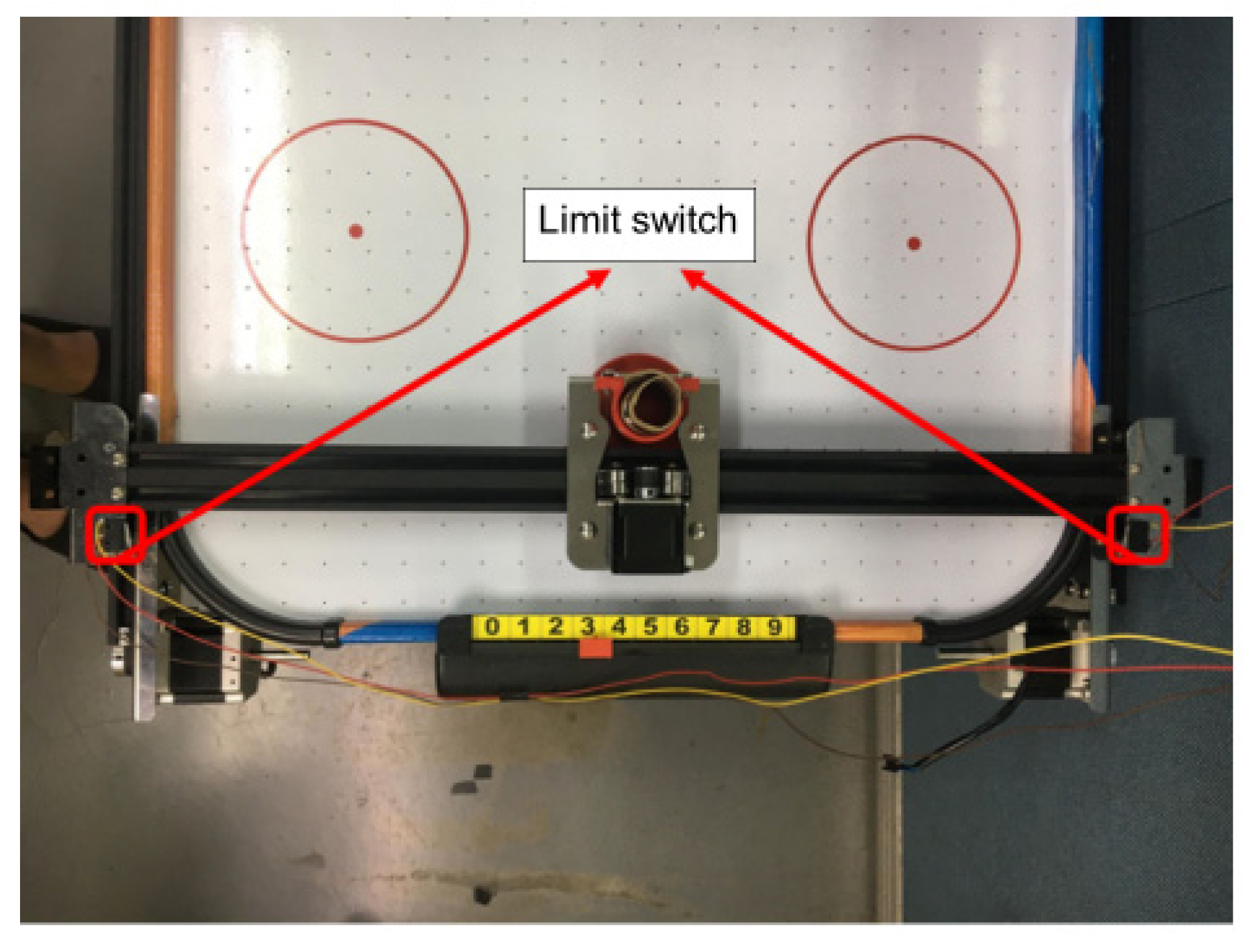
Figure 9.
Limit switch installation diagram.
Figure 9.
Limit switch installation diagram.
Figure 10.
Schematic diagram of stepping motor control mechanism.
Figure 10.
Schematic diagram of stepping motor control mechanism.
Figure 11.
Tiny-YOLOv3 network architecture.
Figure 11.
Tiny-YOLOv3 network architecture.
Figure 12.
Schematic diagram of preliminary predicted moving area.
Figure 12.
Schematic diagram of preliminary predicted moving area.
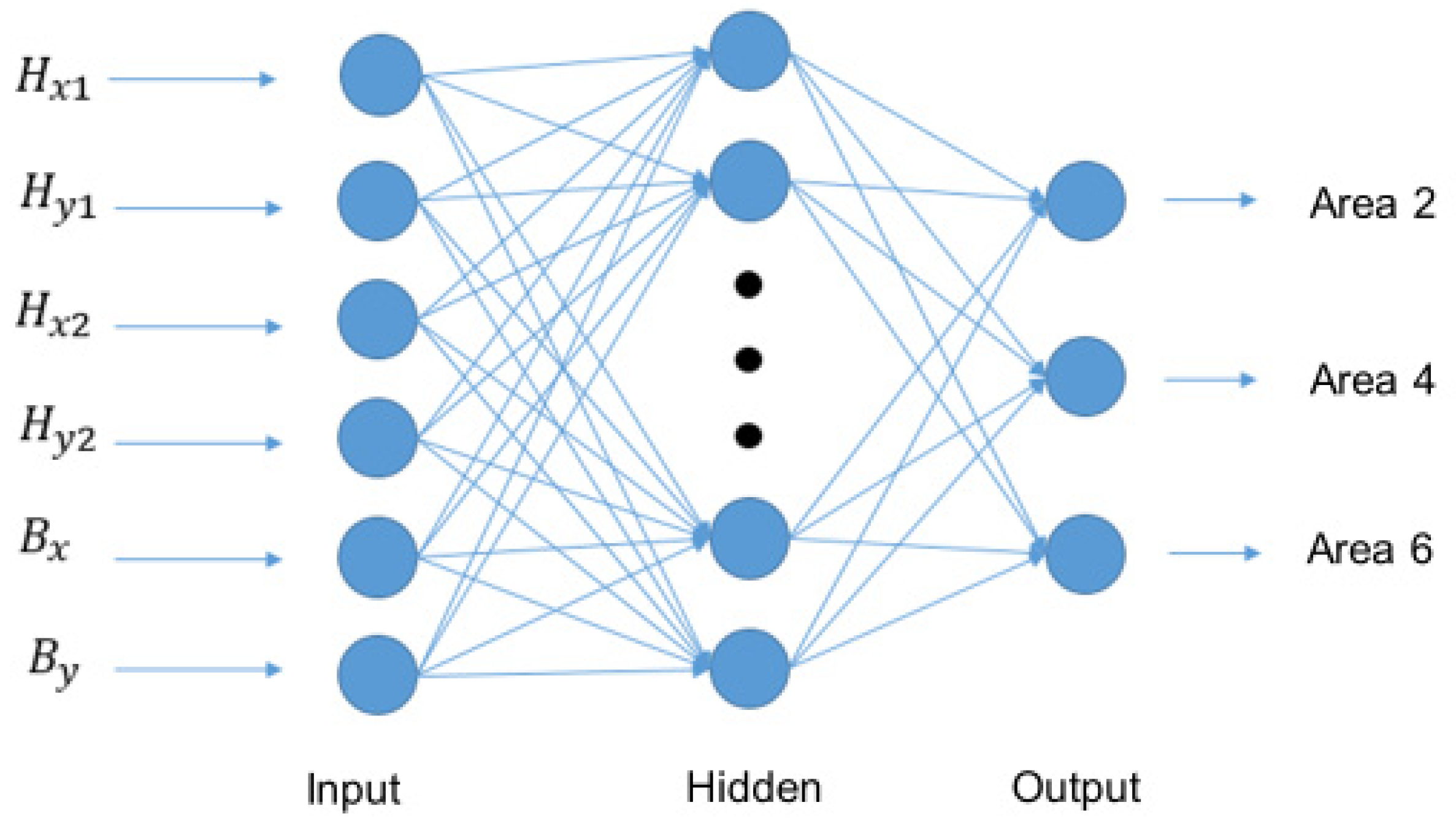
Figure 13.
Network architecture of data set 1.
Figure 13.
Network architecture of data set 1.
Figure 14.
Network architecture of data set 2.
Figure 14.
Network architecture of data set 2.
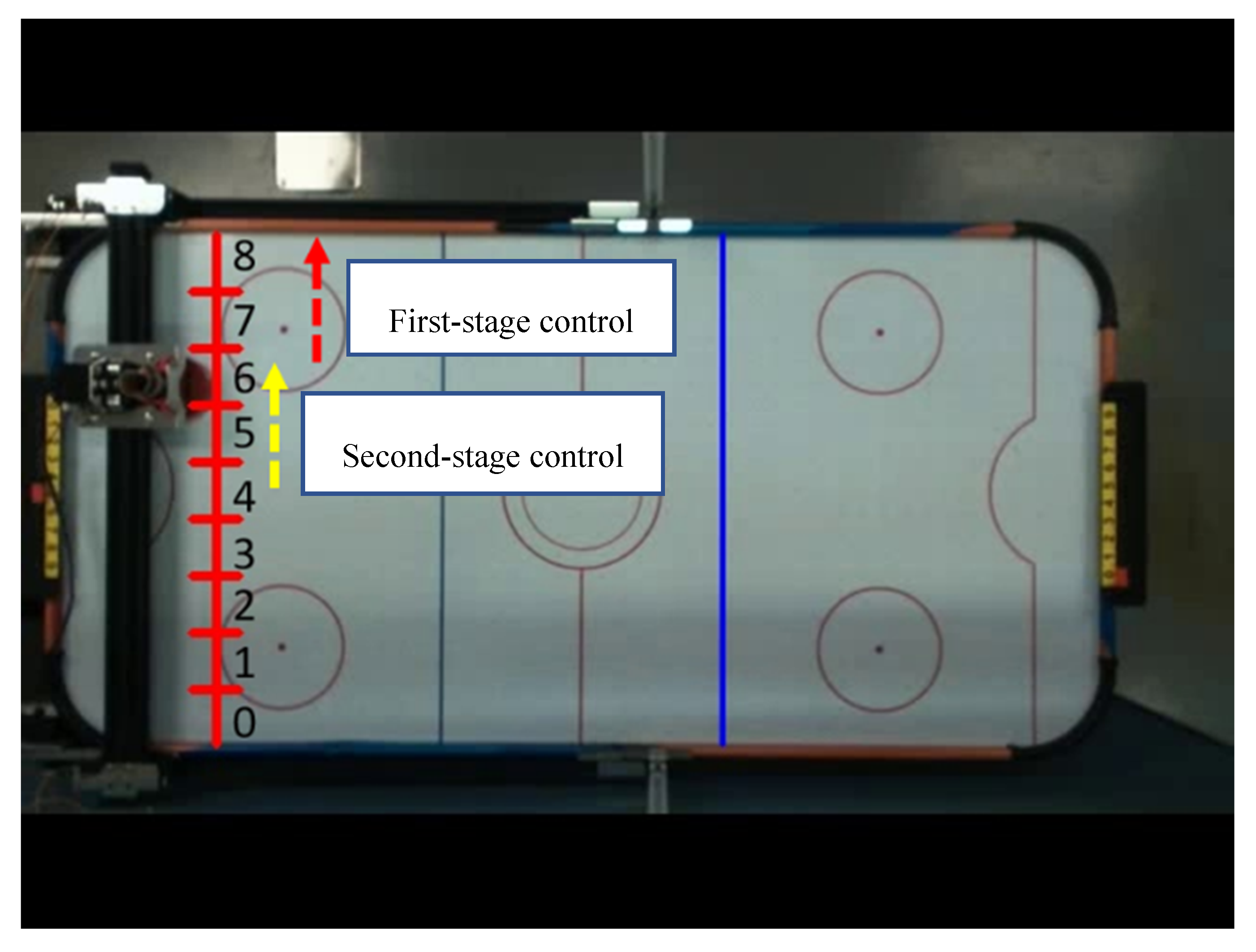
Figure 15.
Schematic diagram of the first control mechanism.
Figure 15.
Schematic diagram of the first control mechanism.
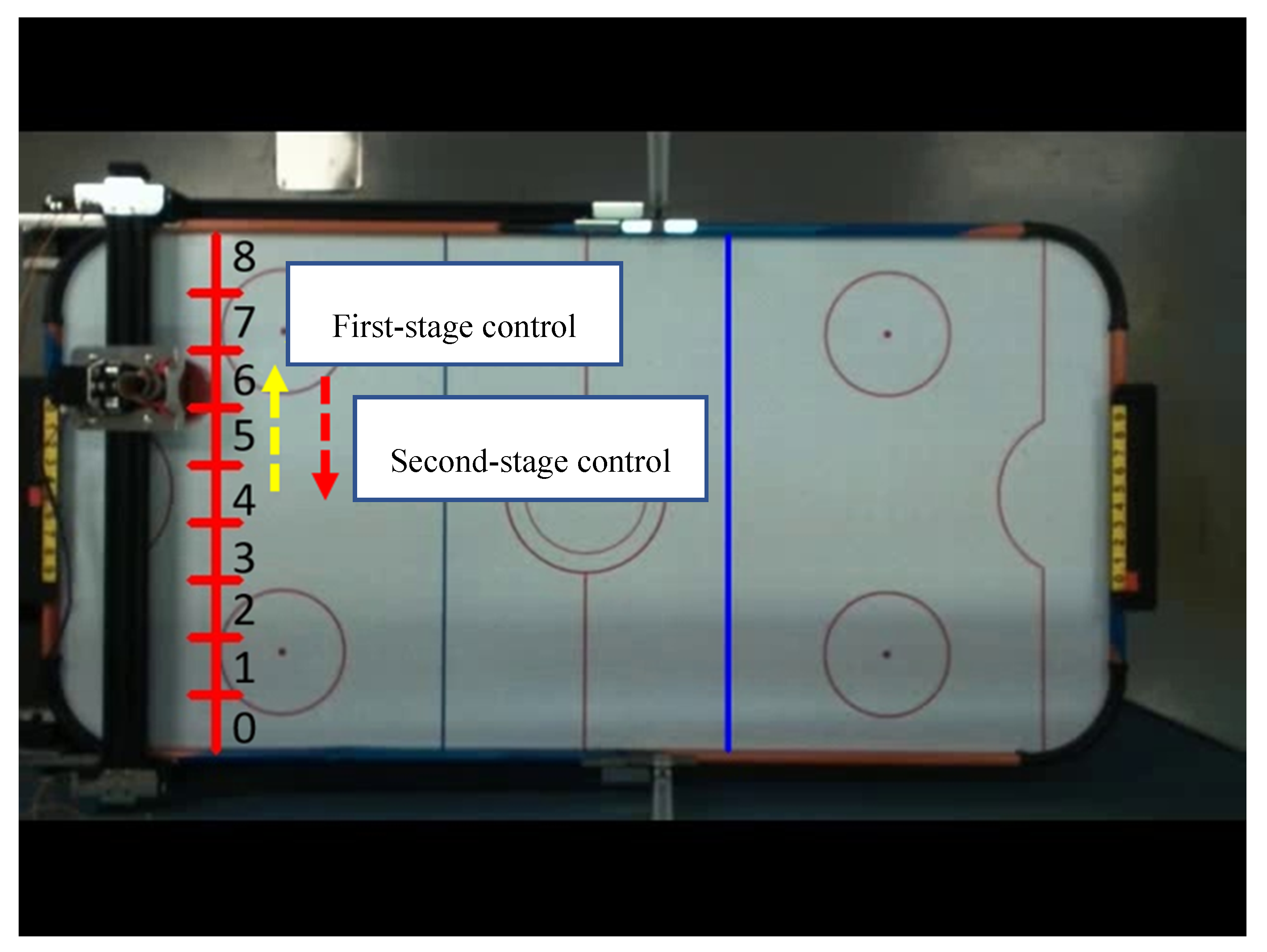
Figure 16.
Schematic diagram of the second control mechanism.
Figure 16.
Schematic diagram of the second control mechanism.
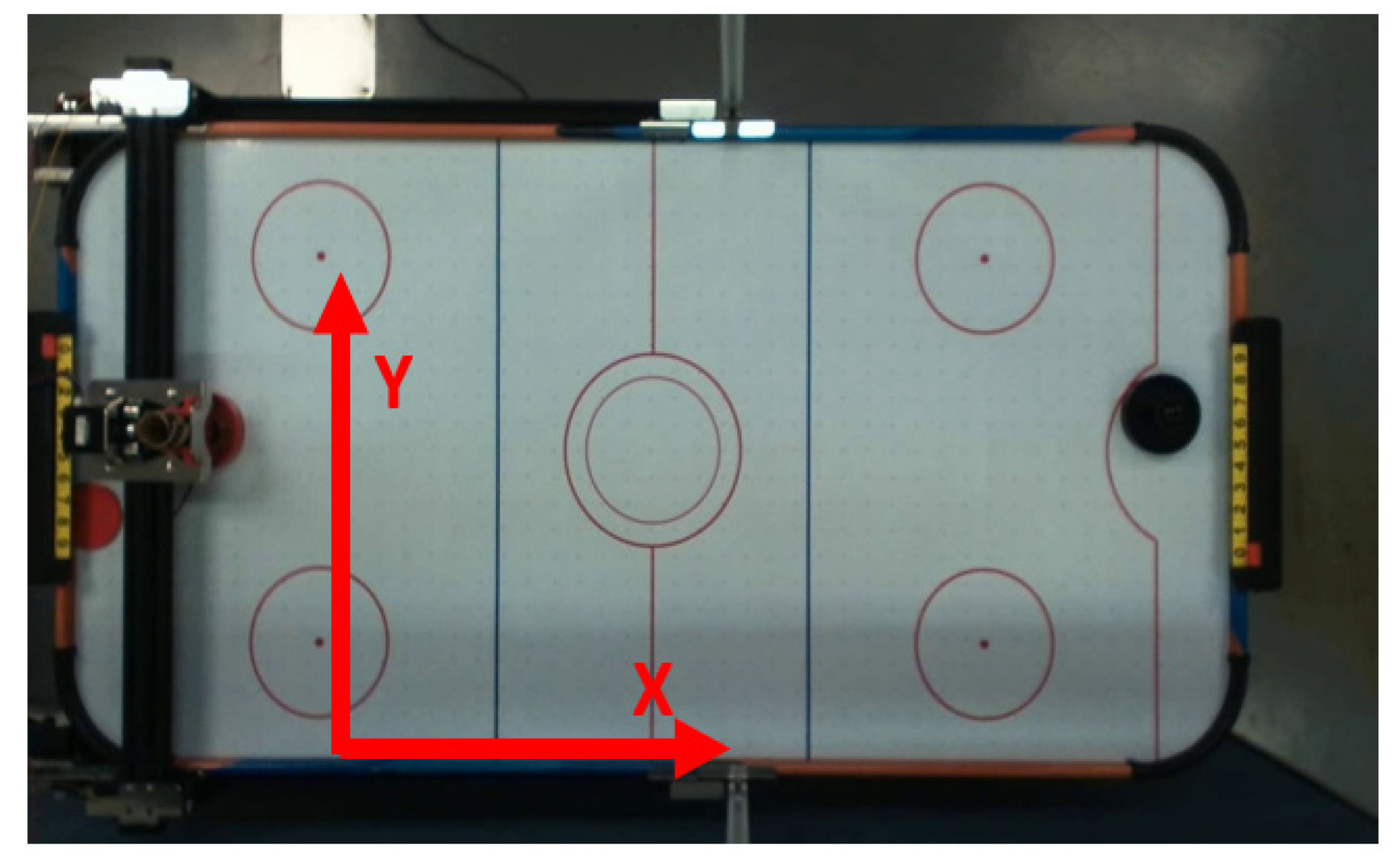
Figure 17.
Air hockey table.
Figure 17.
Air hockey table.
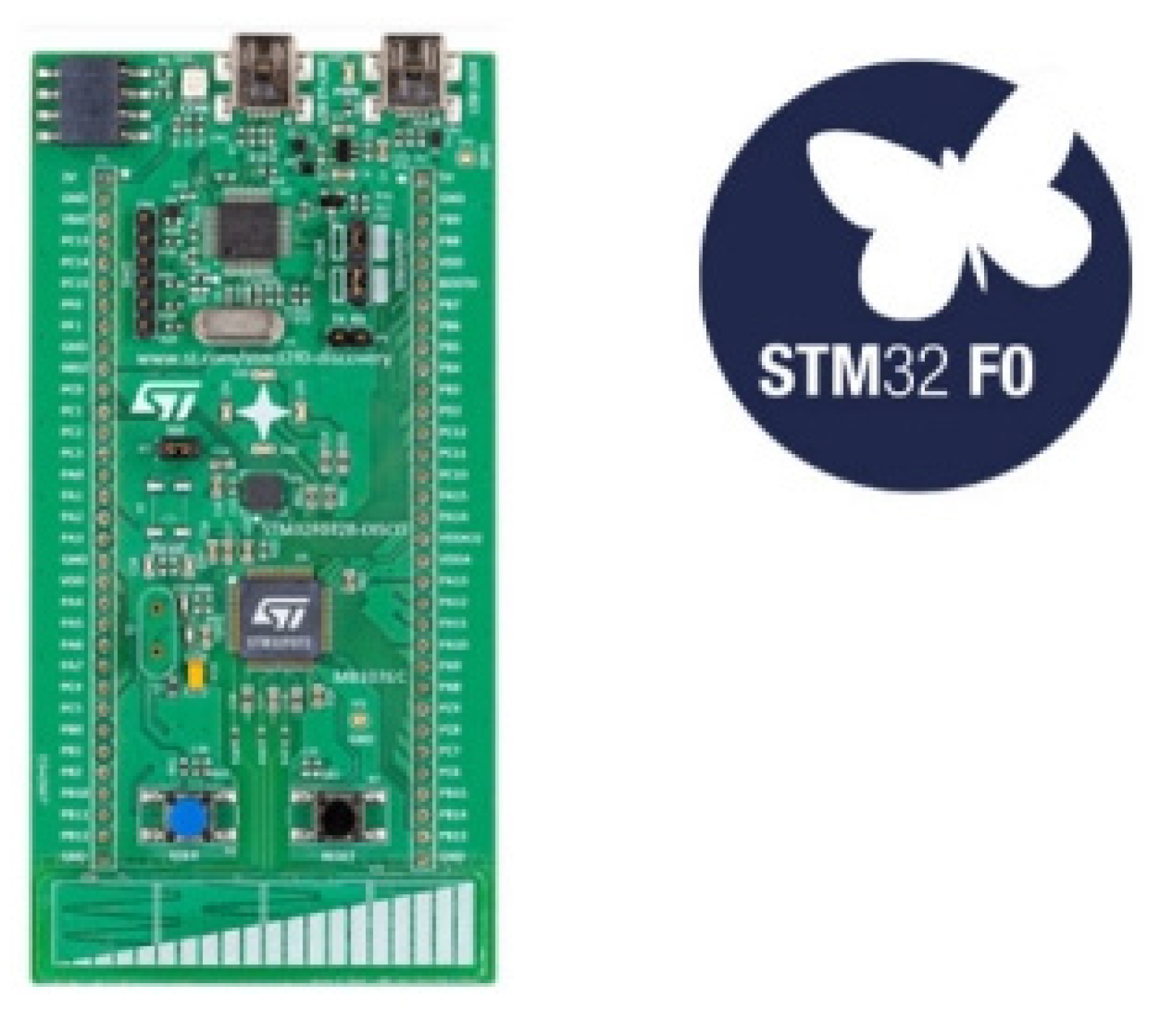
Figure 18.
32F072BDISCOVERY based on Cortex-M0 as the core.
Figure 18.
32F072BDISCOVERY based on Cortex-M0 as the core.
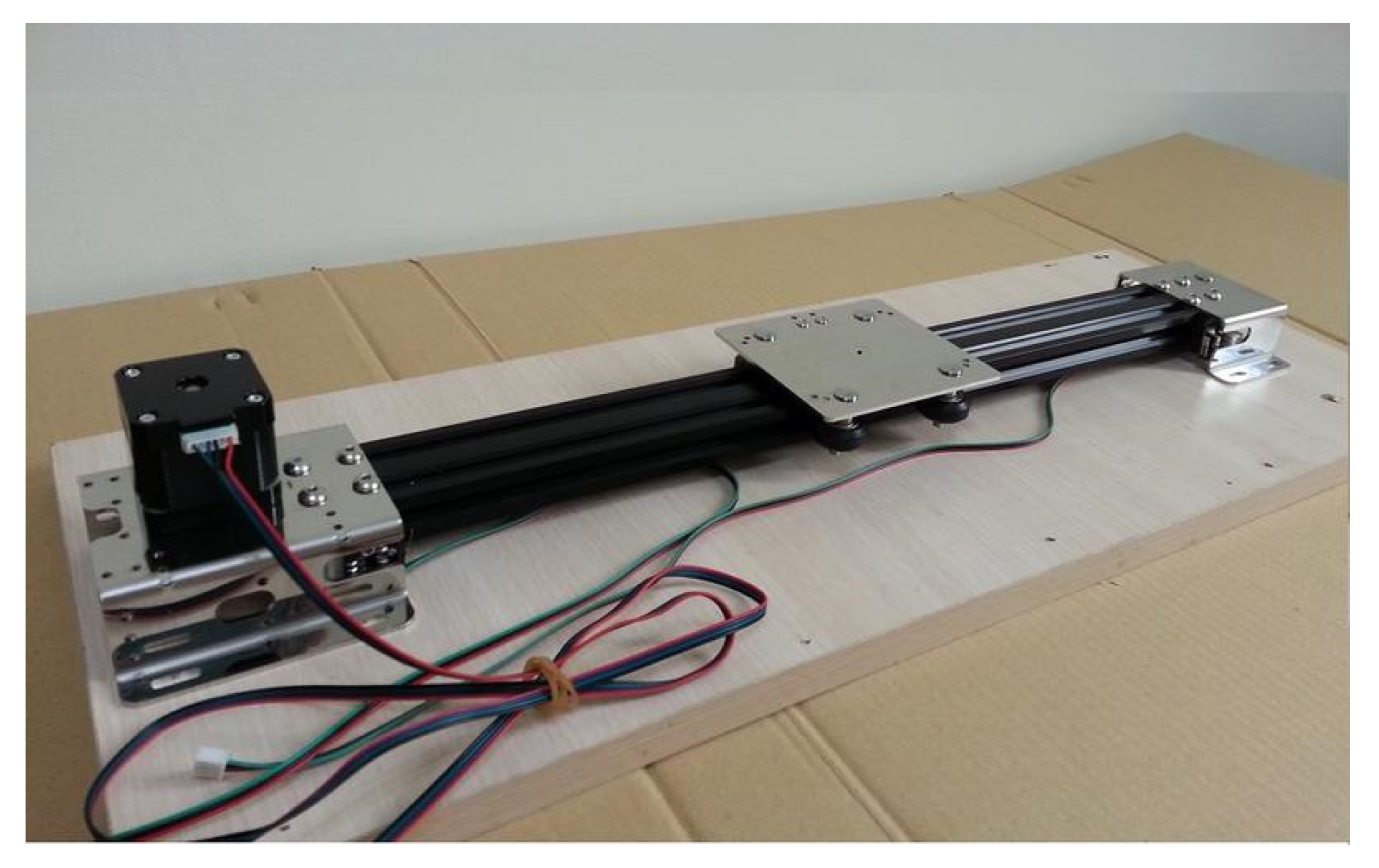
Figure 19.
Ball-type linear slide.
Figure 19.
Ball-type linear slide.
Figure 20.
Stepping motor 42BYGH4417 NEMA 17.
Figure 20.
Stepping motor 42BYGH4417 NEMA 17.
Figure 21.
Diagram of the same moving direction.
Figure 21.
Diagram of the same moving direction.
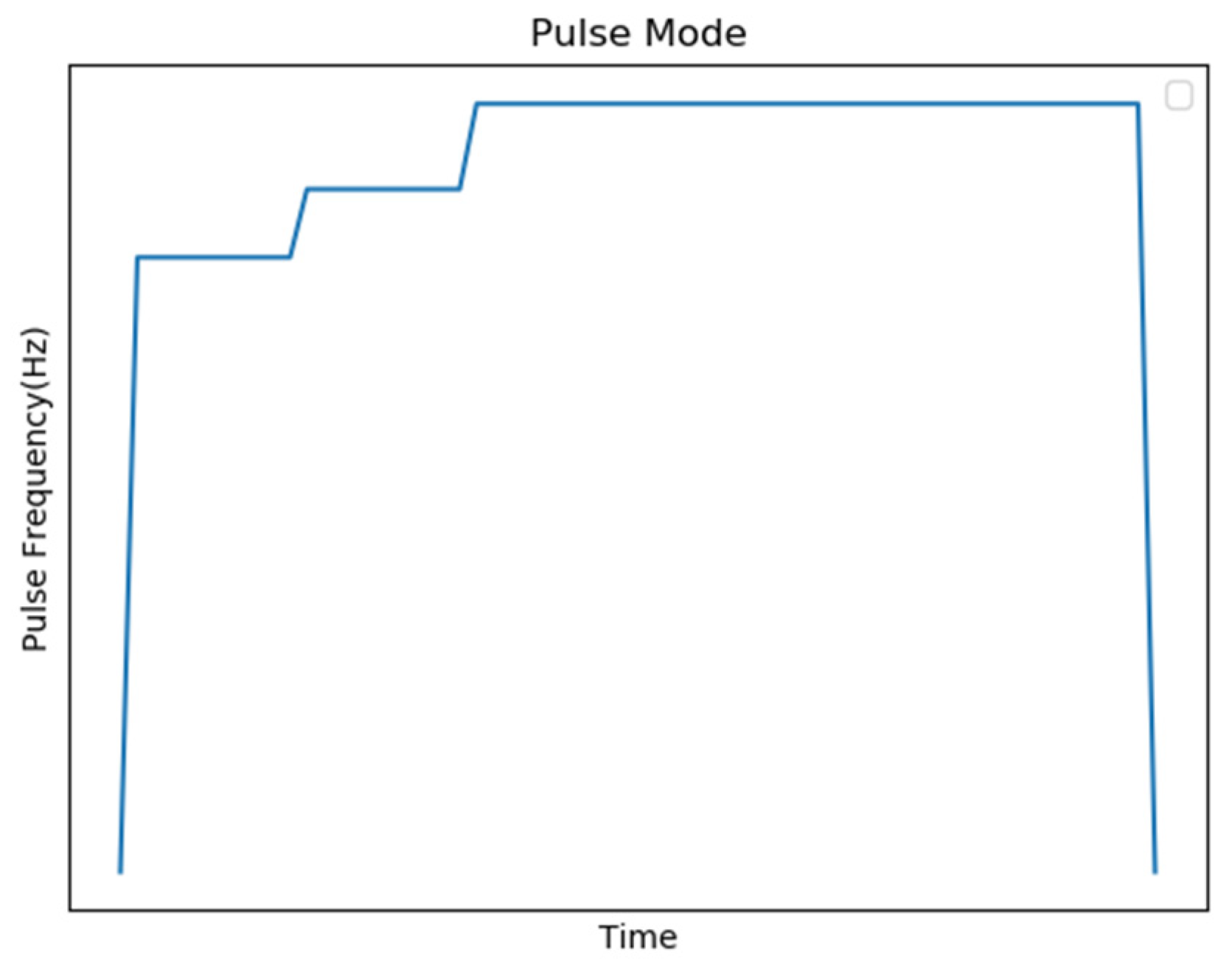
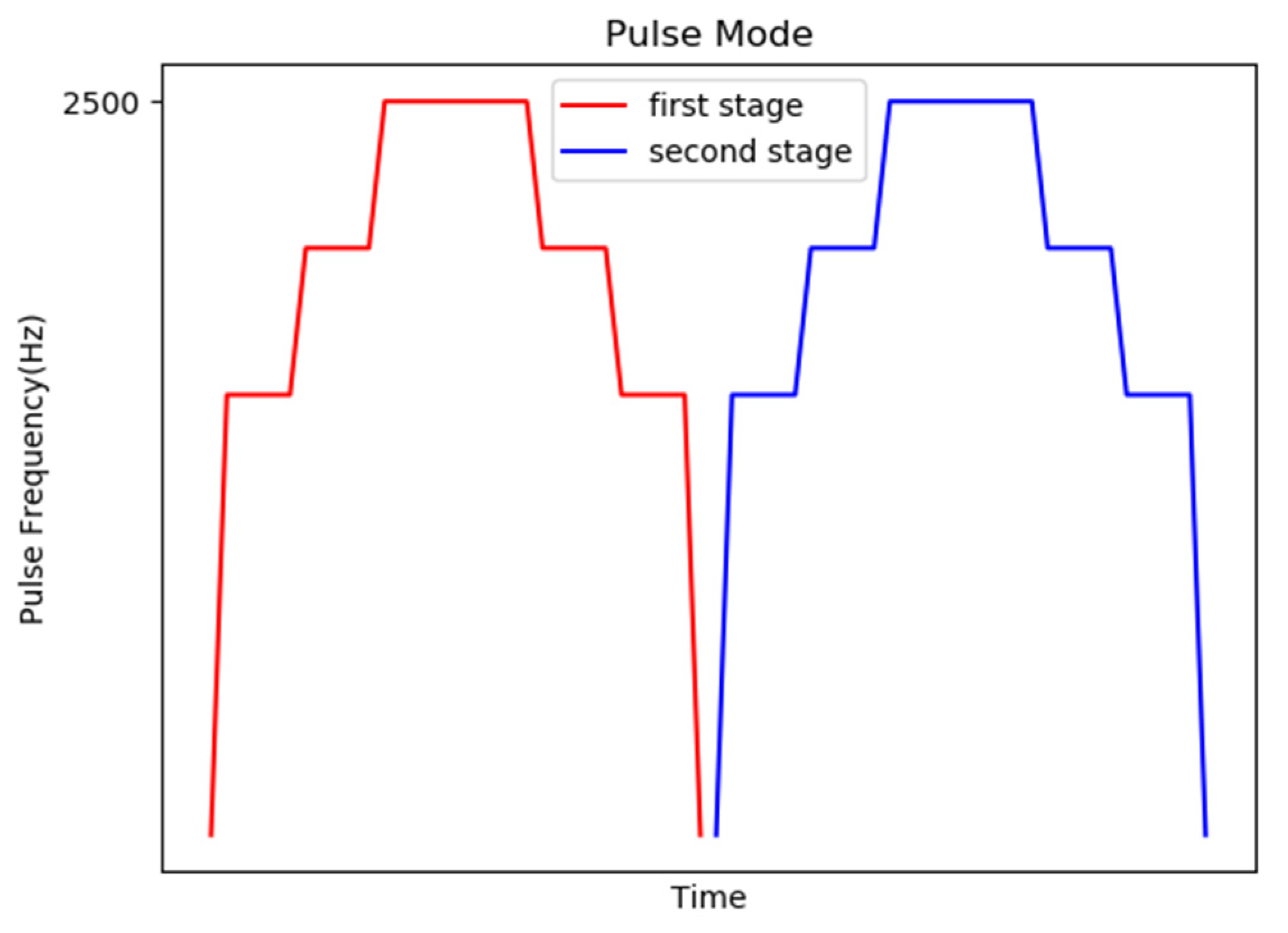
Figure 22.
Time distribution diagram of pulse frequency.
Figure 22.
Time distribution diagram of pulse frequency.
Figure 23.
Diagram of different moving directions.
Figure 23.
Diagram of different moving directions.
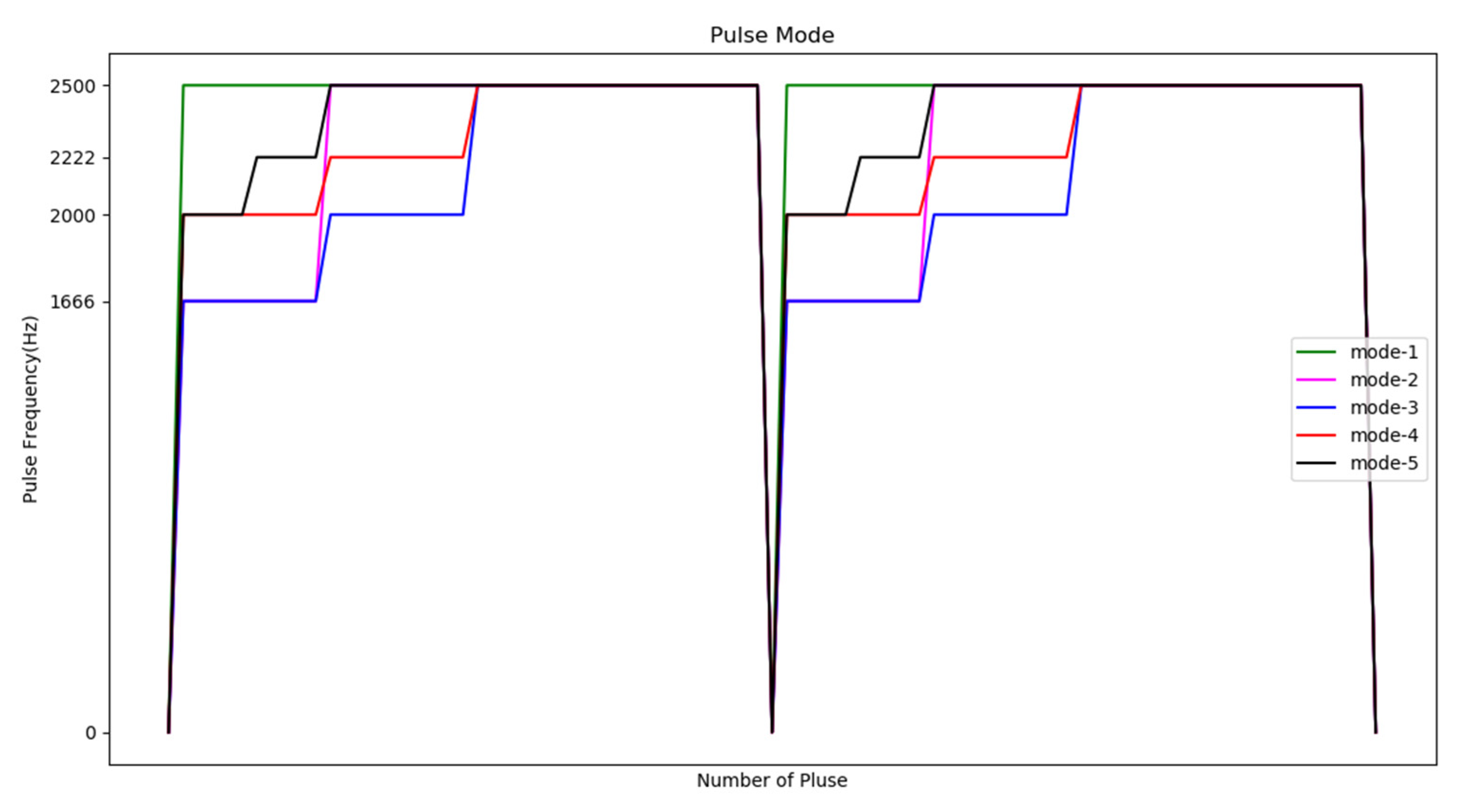
Figure 24.
Time distribution diagram of pulse frequency in the first control mechanism.
Figure 24.
Time distribution diagram of pulse frequency in the first control mechanism.
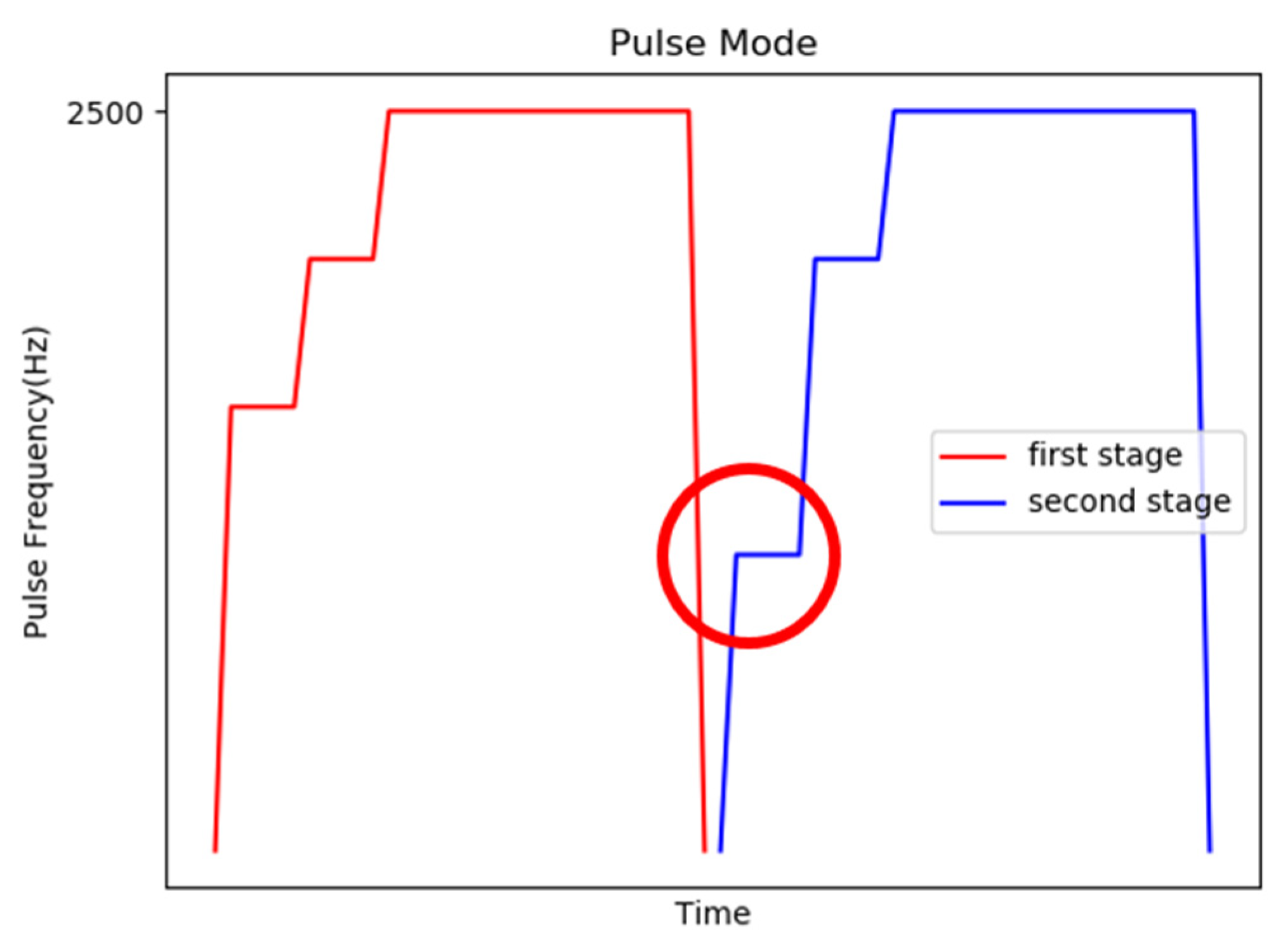
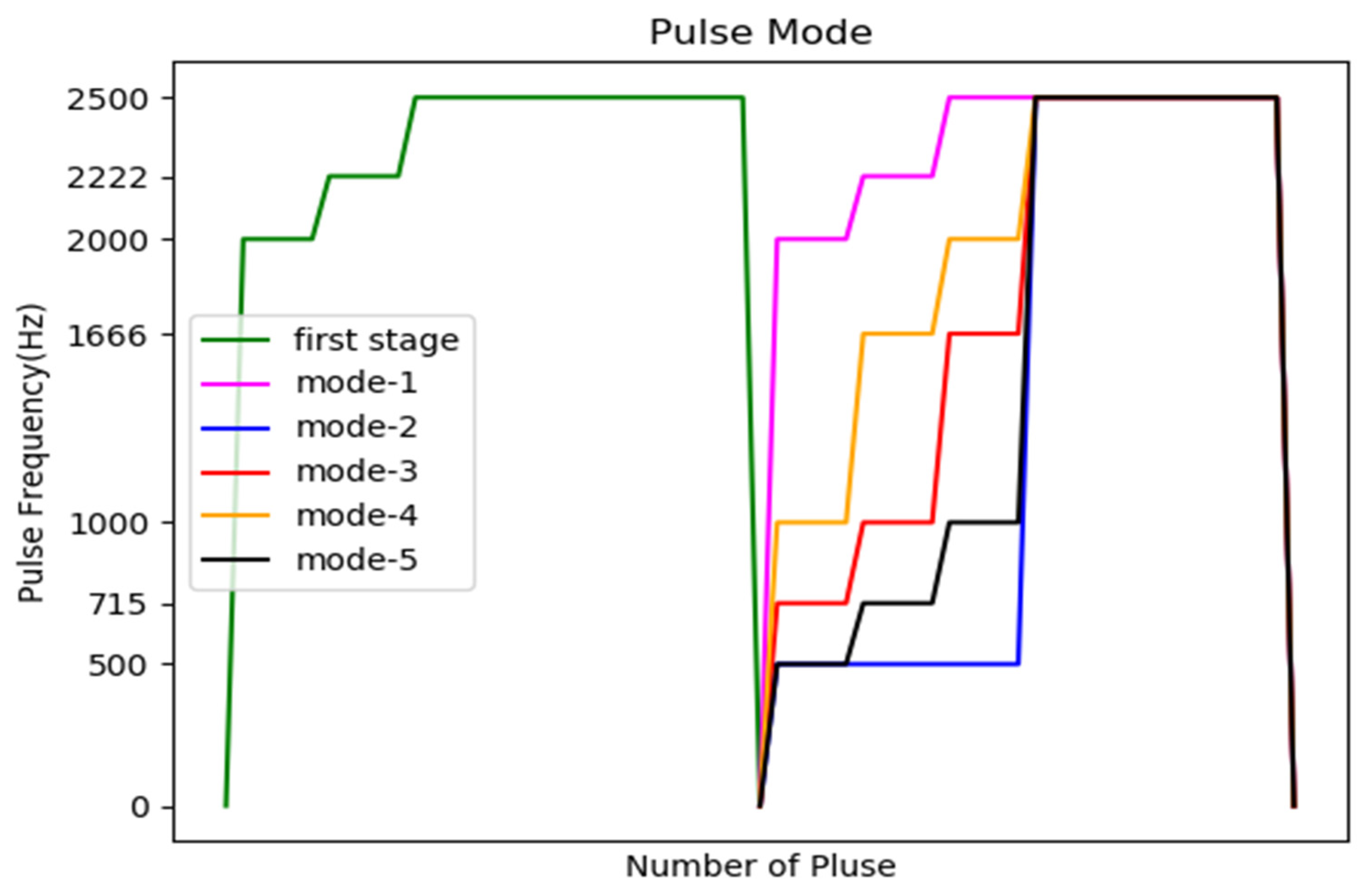
Figure 25.
Time distribution diagram 1 of pulse frequency in the second control mechanism.
Figure 25.
Time distribution diagram 1 of pulse frequency in the second control mechanism.
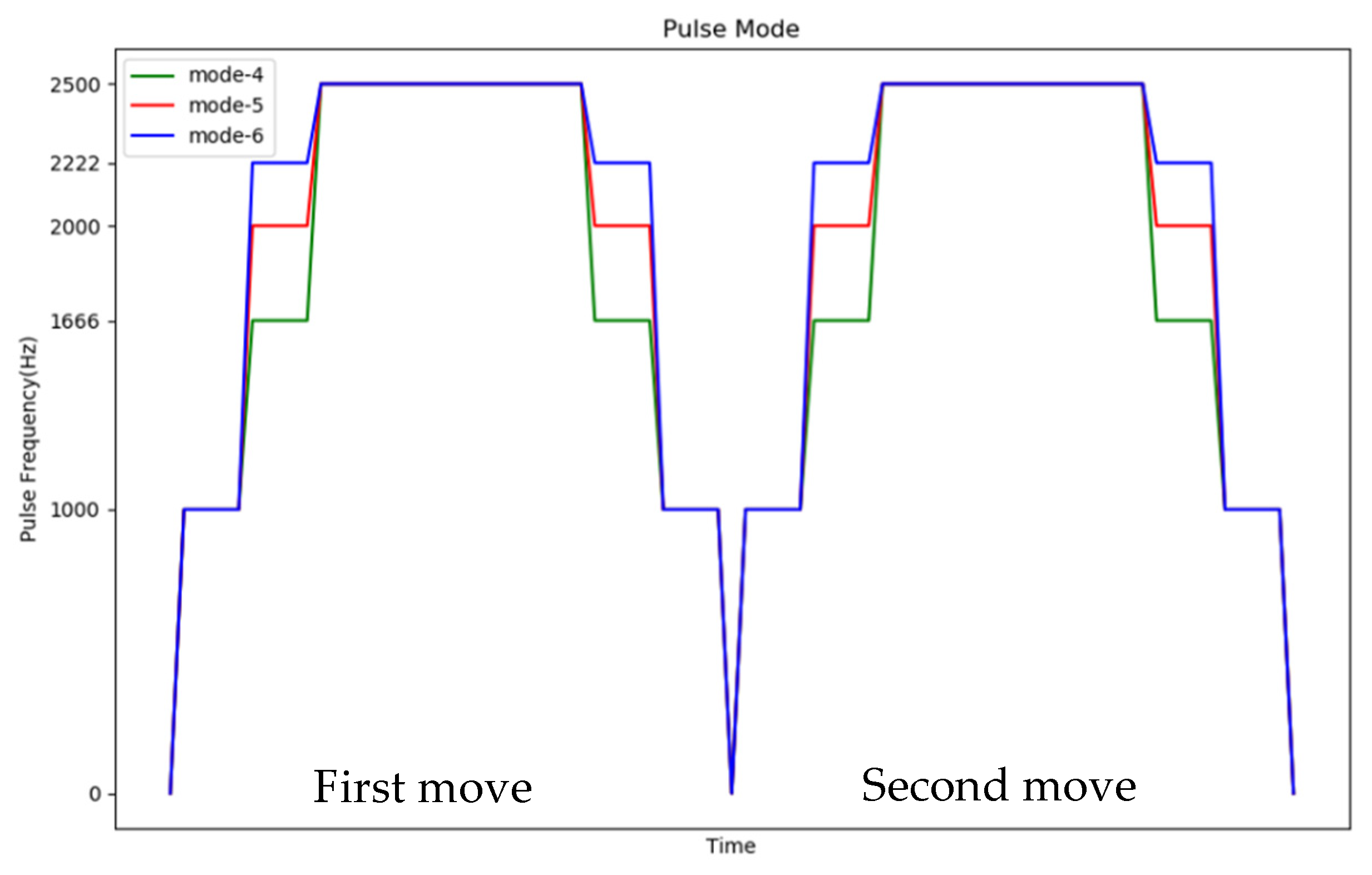
Figure 26.
Time distribution diagram 2 of pulse frequency in the second control mechanism.
Figure 26.
Time distribution diagram 2 of pulse frequency in the second control mechanism.
Table 1.
Experimental environment.
Table 1.
Experimental environment.
| Table length | 109 cm |
| Table width | 59 cm |
| Goal width | 19 cm |
| Air hockey ball diameter | 6.3 cm |
|
Plstic handle diameter
| 7.5 cm |
Table 2.
Hardware equipment.
Table 2.
Hardware equipment.
| Memory | 24 GB |
|---|
| CPU | Intel i5-6500 cpu @ 3.20 GHz |
| GPU | Nvidia Geforce GTX 1050Ti 4 GB |
Table 3.
The classification results.
Table 3.
The classification results.
| | Positive | Negative |
|---|
| True | 94 | - |
| False | 0 | 6 |
| Average center positioning error | 2.21 (pixel) → 0.48 (cm) |
| Maximum center positioning error | 4.03 (pixel) → 0.88 (cm) |
Table 4.
Attacker’s handle recognition result.
Table 4.
Attacker’s handle recognition result.
| | Positive | Negative |
|---|
| True | 100 | - |
| False | 0 | 0 |
| Average center positioning error | 2.71 (pixel) → 0.59 (cm) |
| Maximum center positioning error | 4.71 (pixel) → 1.03 (cm) |
Table 5.
Eight models with different parameters to train neural networks.
Table 5.
Eight models with different parameters to train neural networks.
| | Model l | Model 2 | Model 3 | Model 4 | Model 5 | Model 6 | Model 7 | Model 8 |
|---|
| Input layer | Two-point grip position | Two-point grip position | Hockey position |
| Hidden layer 1 | 512 | 512 | 512 | 512 | 512 | 512 | 512 | 512 |
| Hidden layer 2 | 256 | 256 | 256 | 256 | 256 | 256 | 256 | 256 |
| Hidden layer 3 | | | 64 | 64 | | | 64 | 64 |
| Output layer | Probability of zone 2, 4, 6, respectively |
| Excitation function | Sigmoid | ReLu | Sigmoid | ReLu | Sigmoid | ReLu | Sigmoid | ReLu |
| Loss function | Categorical Cross Entropy |
| Prediction accuracy | 0.54 | 0.57 | 0.44 | 0.59 | 0.80 | 0.75 | 0.79 | 0.55 |
Table 6.
Prediction accuracy and execution time in method 2.
Table 6.
Prediction accuracy and execution time in method 2.
| Final Prediction (Linear Formula Combined with the Reflection Law) | Accuracy | Execution Time
(Millisecond) |
|---|
| Hockey prediction after hockey passes the attack line | 0.79 | 0.04 |
| Hockey prediction after passing the center line | 0.84 | 0.04 |
Table 7.
Accuracy and execution time of the hockey end position prediction of different methods.
Table 7.
Accuracy and execution time of the hockey end position prediction of different methods.
| Method | Accuracy | Execution Time |
|---|
| Linear formula combined with the law of reflection | 79% | 0.04 ms |
| System implementation method 1 | 49% | 2.5 ms |
| System implementation method 2 | 84% | 0.04 ms |
Table 8.
Pulse mode.
| | First Move | Second Move | Time | Lose Step |
|---|
| Mode 1 | 2500 Hz × 2T | 2500 Hz × 2T | 0.664 | yes |
| Mode 2 | 1666 Hz × 10 → 2500 Hz × 10 → 2500 Hz × (2T − 20) | 1666 Hz × 10 → 2500 Hz × 10 → 2500 Hz × (2T − 20) | 0.674 | no |
| Mode 3 | 1666 Hz × 10 → 2000 Hz × 10 → 2500 Hz × (2T − 20) | 1666 Hz × 10 → 2000 Hz × 10 → 2500 Hz × (2T − 20) | 0.672 | no |
| Mode 4 | 2000 Hz × 10 → 2222 Hz × 10 → 2500 Hz × (2T − 20) | 2000 Hz × 10 → 2222 Hz × 10 → 2500 Hz × (2T − 20) | 0.670 | no |
| Mode 5 | 2000 Hz × 5 → 2222 Hz × 5 → 2500 Hz × (2T − 10) | 2000 Hz × 5 → 2222 Hz × 5 → 2500 Hz × (2T − 10) | 0.668 | no |
Table 9.
Pulse mode in the first control mechanism.
Table 9.
Pulse mode in the first control mechanism.
| | First Move | Second Move | Time | Lose Step |
|---|
| Mode 1 | 2000 Hz × 5 → 2222 Hz × 5 → 2500 Hz × (2T − 10) | 2000 Hz × 5 → 2222 Hz × 5 → 2500 Hz × (2T − 10) | 0.668 | yes |
| Mode 2 | 2000 Hz × 5 → 2222 Hz×5 → 2500 Hz × (2T − 10) | 500 Hz × 15 → 2500 Hz × (2T − 15) | 0.696 | no |
| Mode 3 | 2000 Hz × 5 → 2222 Hz×5 → 2500 Hz × (2T − 10) | 715 Hz × 5 → 1000 Hz×5 → 1666 Hz × 5 → 2500 Hz × (2T − 15) | 0.683 | yes |
| Mode 4 | 2000 Hz × 5 → 2222 Hz×5 → 2500 Hz × (2T − 10) | 1000 Hz × 5 →1666 Hz×5 → 2000 Hz × 5 → 2500 Hz × (2T − 15) | 0.677 | yes |
| Mode 5 | 2000 Hz × 5 → 2222 Hz×5 → 2500 Hz × (2T − 10) | 500 Hz × 5 → 715 Hz × 5 → 1000 Hz × 5 → 2500 Hz × (2T − 15) | 0.690 | no |
Table 10.
Pulse mode in the second control mechanism.
Table 10.
Pulse mode in the second control mechanism.
| | Pulse of Start | Constant-Speed Pulse | Deceleration Pulse | Time | Lose Step |
|---|
| Mode 1 | 1000 Hz × 5 | 2500 Hz × (2T − 10) | 1000 Hz × 5 | 0.690 s | yes |
| Mode 2 | 833 Hz × 5 | 2500 Hz × (2T − 10) | 833 Hz × 5 | 0.698 s | no |
| Mode 3 | 1000 Hz × 3 → 2222 Hz × 2 | 2500 Hz × (2T − 10) | 2222 Hz × 2 → 1000 Hz × 3 | 0.691 s | yes |
| Mode 4 | 1000 Hz × 5 → 1666 Hz × 5 | 2500 Hz × (2T − 20) | 1666 Hz × 5 → 1000 Hz × 5 | 0.695 s | no |
| Mode 5 | 1000 Hz × 5 → 2000 Hz × 5 | 2500 Hz × (2T − 20) | 2000 Hz × 5 → 1000 Hz × 5 | 0.693 s | no |
| Mode 6 | 1000 Hz × 5 → 2222 Hz × 5 | 2500 Hz × (2T − 20) | 2222 Hz × 5 → 1000 Hz × 5 | 0.692 s | no |
Table 11.
The fastest ball speed that the system can block after the actual test.
Table 11.
The fastest ball speed that the system can block after the actual test.
| Implementation Method | Ideal Speed | Speed in Experiment |
|---|
| System implementation method 1 | 0.96 m/s | 0.88 m/s |
| System implementation method 2 | 1.11 m/s | 1.15 m/s |
Table 12.
One hundred actual game results.
Table 12.
One hundred actual game results.
| Item Area | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|
| Distribution probability by area | 0.2 | 0.18 | 0.14 | 0.08 | 0.05 | 0.05 | 0.22 | 0.18 | 0.08 |
| Accuracy of preliminary prediction | 0.79 | 0.77 | 0.79 |
| Accuracy of final prediction | 1 | 0.83 | 0.81 | 0.87 | 0.8 | 0.8 | 0.81 | 0.77 | 0.75 |
| Actual blocking probability | 0.5 | 0.55 | 0.71 | 0.75 | 0.8 | 1 | 0.72 | 0.61 | 0.37 |
| Average blocking rate | 0.67 |






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}