1. Introduction
Indoor localization refers to determining the position of an object in an indoor environment. It is an essential problem in many applications including search, rescue, and navigation in the indoor environments, monitoring and surveillance for security and defense purposes and Internet of Things (IoT) [
1]. Unlike outdoor positioning, indoor positioning itself is challenging because satellite signals cannot be received reliably in indoor environments. Several localization methods have been developed [
2,
3,
4,
5,
6,
7,
8] and they mainly involve exploiting the time difference of arrival (TDOA) [
2,
3], direction of arrival (DOA) [
4,
5] and time of arrival (TOA) [
6] measurements, as well as ultra-wideband (UWB) technique [
7,
8]. However, these schemes require extra hardware not currently available within common mobile devices such as smartphones and tablets. Moreover, TDOA and TOA-based methods need precise synchronization among sensors or between the object to be localized and sensors, which could be practically difficult to achieve. Hence, under the constraints of low-cost deployment, we need to find different methods to solve the indoor localization problem.
Received signal strength (RSS)-based methods are common alternatives for indoor localization without requiring additional sensor modules. There have been a variety of techniques proposed for indoor positioning using RSS measurements from Wi-Fi [
9], RFID [
10], BLE [
11], and magnetic [
12] devices. Among these methods, Wi-Fi RSS-based indoor localization is of particular interests due to the following two advantages. Firstly, Wi-Fi access points (APs) have been extensively deployed in indoor environments; secondly, measuring Wi-Fi RSS is readily available in the current Wi-Fi terminals. Many regression techniques have become available for Wi-Fi RSS indoor positioning and they include the distance-based [
13,
14] and Gaussian Processes (GP)-based techniques [
15,
16]. In fact, the use of the standard log-normal model for indoor positioning (see, e.g., [
17]) can be considered as a regression technique as well.
In this work, we shall take a different approach and consider the fingerprint-based indoor localization method. This is because for many practical applications, it would be sufficient if we can determine which area the object belongs to. Furthermore, the fingerprint-based approach does not require the simultaneous detection of at least three APs or knowing the precise locations of APs. Generally speaking, the deployment of a RSS fingerprinting localization system has two phases, namely the offline phase and online phase. During the offline phase, Wi-Fi RSS data at various object positions, also referred to as the reference points (RPs), are collected to build a database. Using RSS measurements as fingerprints, the object location can be estimated during the online phase. The fingerprint-based localization is essentially a pattern classification problem. Specifically, the RSS database regards the RSS measurements of the RPs as their patterns. The newly received RSS measurements are matched against these patterns to find the position estimates.
In this paper, we focus on indoor localization of an object using sparsely deployed Wi-Fi APs. This work presents a novel framework that first uses an improved K-Means clustering algorithm to partition the environment into possibly partially overlapping zones. This greatly simplifies the (offline) training and (online) localization phases at the cost of increasing the number of required classifiers. When performing the object position estimation, we use the 1NN algorithm [
18] to determine which zone the object lies in and apply the support vector machine (SVM) [
19] to find the exact object location estimate.
The proposed localization technique is different from existing hierarchical classification-based approaches mainly in the sense that the indoor environment of interest is automatically partitioned into possibly overlapping zones (see
Section 4). This leads to reduced zone classification errors that could be costly especially for the conventional methods, because in this case, the following RP classifier would definitely produce erroneous localization output. As a result, the indoor positioning accuracy is also enhanced. The effectiveness of the new hierarchical classification-based approach was validated in a real-world hospital. Improvement of 1.7% to 3.2% in classification accuracy over direct applications of flat classification and improvement of 1.4% to 2.1% in classification accuracy against other hierarchical localization approaches were observed.
The rest of the paper is organized as follows.
Section 2 introduces two types of classification frameworks and reviews some existing hierarchical localization approaches. A new hierarchical classification-based indoor localization method, including the improved K-Means clustering algorithm, SVM and one-versus-one strategy, are presented in
Section 3. In
Section 4, the experimental results are given.
Section 5 concludes this paper.
3. System Model
In this section, we present a new hierarchical classification framework for Wi-Fi RSS-based indoor positioning, which again contains the offline training phase and online localization phase. The block diagram of the entire system is shown in
Figure 3. For the offline phase, we propose an improved K-Means algorithm to cluster RPs. The RPs are allowed to be included in more than one clusters, i.e., the obtained clusters can overlap with one another. We then train the 1NN method as the zone classifier and SVMs as the RP position classifier. On the localization stage, newly received RSS measurements are input into the hierarchical localization system to generate the online positioning result.
3.1. Hierarchical Classification with Cluster Overlap
Within the conventional hierarchical classification structure, as shown in
Figure 1b, zones are non-overlapping, which means that a RP can only belong to a single zone. But the RSS samples at a RP may be clustered into more than one zones. As a result, exiting hierarchical classification techniques use one attribute only to represent one RP to address this problem. However, in this case, a classification error in the zone level could be quite costly, as this means the result produced by the position classifier would be erroneous as well.
In the proposed hierarchical classification structure, zones are allowed to overlap. For illustration purpose, an example is shown in
Figure 4. It can be seen that RP c belongs to two zones {a, b, c} and {c, d}. In other words, the two zones are overlapped in the position space. Since the zones could be overlapped, we refer to this classification framework the hierarchical classification with cluster overlap. This scheme can reduce zone-level classification errors, which can be better understood by noting that in
Figure 4, if RP c is the true localization output, no matter whether the zone classifier outputs {a, b, c} or {c, d}, this intermediate decision is always correct. With this observation in mind, we can use a simple zone classifier while adopting more complex classification techniques in the remaining levels. On the other hand, because the zones can be overlapped, we can use all RSS samples for RP clustering, so that more statistical information in the RSS raw data can be utilized.
3.2. Offline Training Phase
The offline phase accomplishes three tasks: clustering RPs, training the zone classifiers and training the position classifiers. In the developed system, we use the improved K-Means algorithm to cluster RPs, 1NN algorithm as the zone classifier, and SVM as the position classifier.
3.2.1. Area Partition
The area of interest is automatically divided into zones using an improved K-Means clustering algorithm. Suppose there are
RPs in the indoor environment. Let
, denote the number of RSS measurements collected at the
-th RP. Furthermore, suppose there are
APs installed. Thus, we can express the RSS measurements obtained at the
-th RP as
Clearly,
is a
row vector. The entire RSS database can be represented as
The improved K-Means clustering algorithm achieves the purpose of clustering RPs by exploiting the available RSS measurements from all RPs. Specifically, this method first uses the standard K-Means algorithm to assign the RSS measurements to
clusters
and at the same time, find their centroids
. Here,
is also a
vector and each entry is the mean value of a particular AP’s RSS measurements in cluster
. That is, it can be mathematically expressed as
Next, we determine which clusters a RP belongs to by calculating the ratio of the number of RSSs from this RP in each cluster to the total number of RSSs collected at this RP. Suppose that in cluster
, there are
RSS measurements from the
-th RP. We then calculate the ratio
. If it is greater than a threshold
, we have that cluster
contains significant amount of RSSs from the
-th RP, so the
-th RP is assigned to cluster
. This process is repeated for each RP. The value of
is user-defined and it controls the size of the overlapping area. The smaller the value of
is, the more zones will overlap. The improved K-Means algorithm is summarized in Algorithm 1.
| Algorithm 1: Improved K-Means clustering algorithm |
Input: RSS database in (2), threshold
Output: RP’s cluster labels , cluster centers |
Initialize centroid points. Calculate the Euclidean distance between the RSS measurements and cluster centroids using Assign the RSS measurements to the cluster whose centroid is the closest When all RSS measurements are assigned, re-calculate the cluster centroids Iterate step 2, 3 and 4 until convergence Output the cluster centers Compute If , assign the -th RP to cluster When all RPs are assigned, terminate.
|
This clustering method uses all the RSS measurements for clustering and the final clustering results are expressed in terms of each RP belonging to at least one clusters, which accomplishes the area partition. It is worth mentioning that the value of
should satisfy
The justification for the lower limit of
is straightforward. In words,
means when the number of RSS measurements from
in a cluster
is zero, the
should not be included in zone
. The justification for the upper limit of
in (4) is as follows. It can be shown that
In order to ensure that the RP would be clustered into at least one zone, it is required that
Therefore, for all
RPs, to guarantee that each RP is clustered into at least one zone, the value of
should also fulfill
Because
cannot be obtained before the clustering algorithm is terminated,
should be set to a value such that (7) is satisfied even in the worst case. This value can be found via solving the following minmax optimization problem
The solution can be found to be
The upper limit for is now verified.
3.2.2. Zone Classifier
In the developed indoor localization system, we use the 1NN algorithm, a special case of the KNN method with
, as the zone classifier. KNN is one of the simplest machine learning algorithms. It classifies an object using a voting mechanism which selects the most voted class among the k neighbors closest to the object. The KNN was used in RADAR which is widely recognized as one of the pioneering works in the field of Wi-Fi indoor localization and usually considered as a baseline to evaluate new indoor Wi-Fi localization systems [
31]. We use 1NN as the zone classifier for the following reasons: (1) The presence of zone overlap means that RSS data in different zones could the same, which is not appropriate for the classification models that require pre-training. (2) The classification difficulty of the first level is relatively low, especially under the overlapped area partition. Therefore, 1NN would be sufficient for the first-level zone classification.
We use the RSS measurement cluster centers as the first level database and use the 1NN to classify the zones. When a new set of RSS measurements are obtained, we calculate the Euclidean distance between these measurements and each cluster center . The cluster with the closest center is selected as the zone for the newly collected RSS measurements.
3.2.3. Position Classifier
We proceed to train position classifiers for each zone for position determination. The SVM is used as the position classifier to distinguish RPs in a zone through exploiting all the RSS measurements. The basic form of SVM is implemented for binary classification problem for linearly separable datasets. For the nonlinear case, the kernel trick maps the feature space to make the data linearly separable in the high-dimensional space, enabling the SVM to handle nonlinear classification problems. For multi-class classification, a number of SVM-based binary classifiers are required to distinguish multiple classes. The one-versus-all [
33] method and the one-versus-one method [
34] are two commonly adopted techniques to solve multi-class classification problems using binary classifiers. In [
23], the authors proved that the one-versus-one method performs better in indoor localization. So, in our system, we use the one-versus-one SVM to solve the position classification problem. In a
-class problem, the use of the one-versus-one strategy requires training
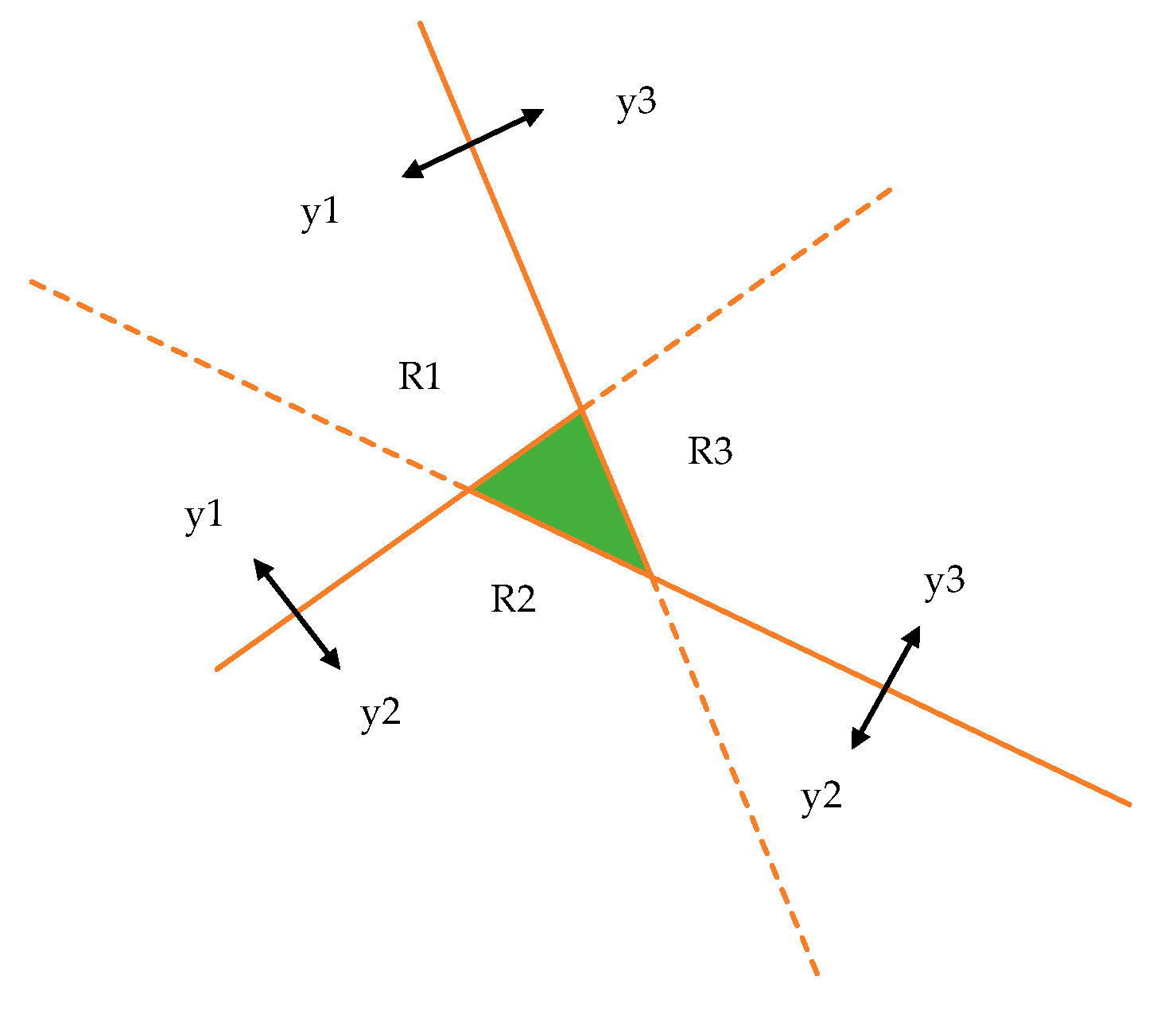
binary SVM classifiers to discriminate all RP pairs. The final decision is selected to be the RP with the highest number of votes. However, the one-versus-one approach may result in regions of the position space which are ambiguously labeled as shown in
Figure 5. Among the
votes, if two or more labels receive the largest votes at the same time, there will be localization ambiguity. In our system, if the localization ambiguity occurs, the selected zone would be taken as the positioning result. We call this operation “back to zone”. In other words, in this case, we choose to enlarge the positioning area to obtain a more reliable localization result. This method is a compromise between the positioning accuracy and reliability.
3.3. Online Phase
In the online localization phase, we cascade the trained zone and position classifiers, forming a complete hierarchical localization system. When new RSS measurements are input into the system for position determination, the system first uses the 1NN zone classifier to determine the zone where the target is located. After determining the zone, the system inputs the RSS measurements into the SVM position classifier corresponding to the particular zone to obtain the estimated position of the target.
4. Experiments and Results
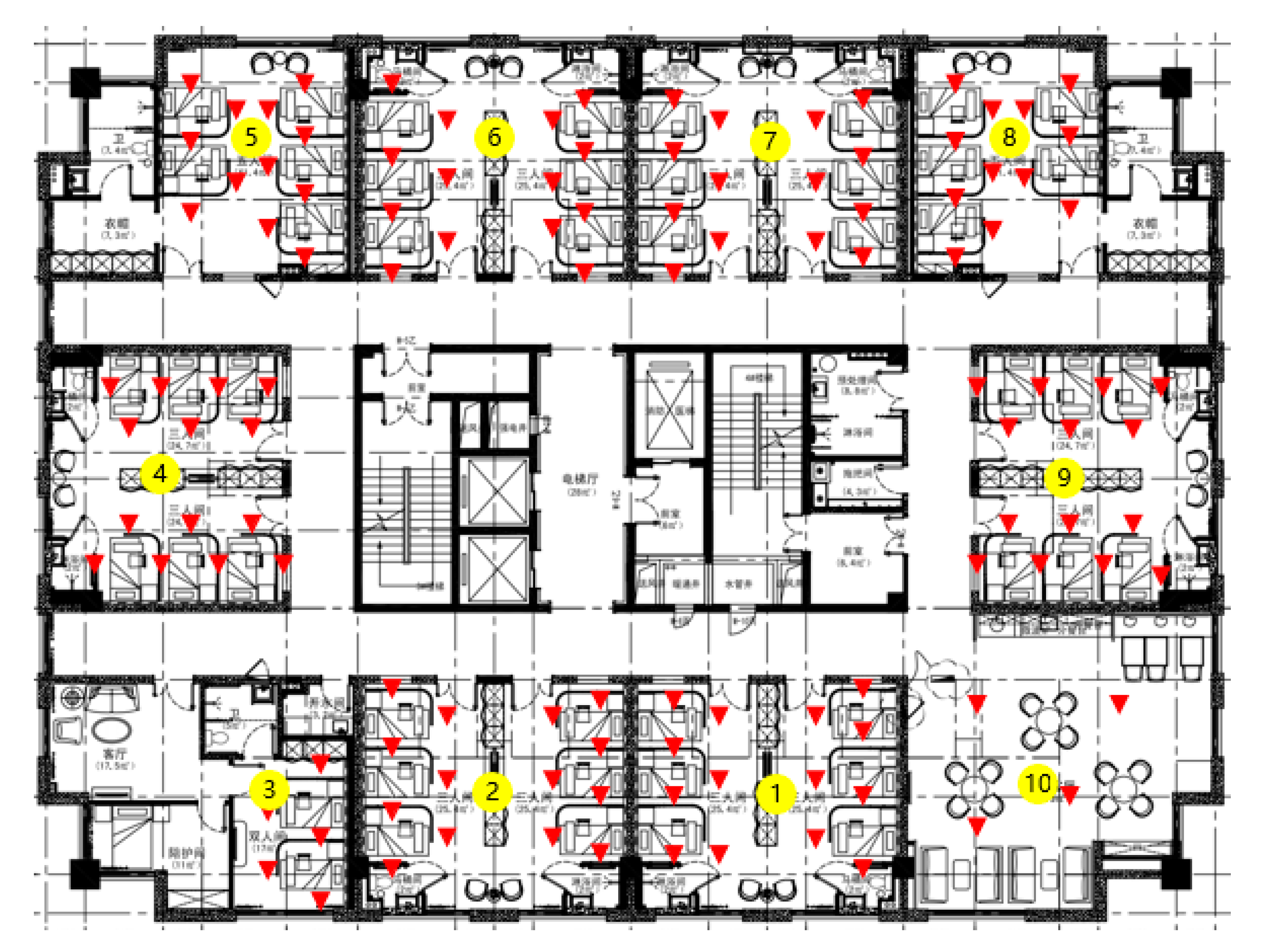
In order to evaluate the proposed hierarchical classification scheme in a real-world environment, we conducted a measurement campaign in a hospital in Wenling, Zhejiang, China. Since the patients in this hospital are most elderly, the accuracy in both zone classification and position determination plays a vital role in emergency handling. As shown in
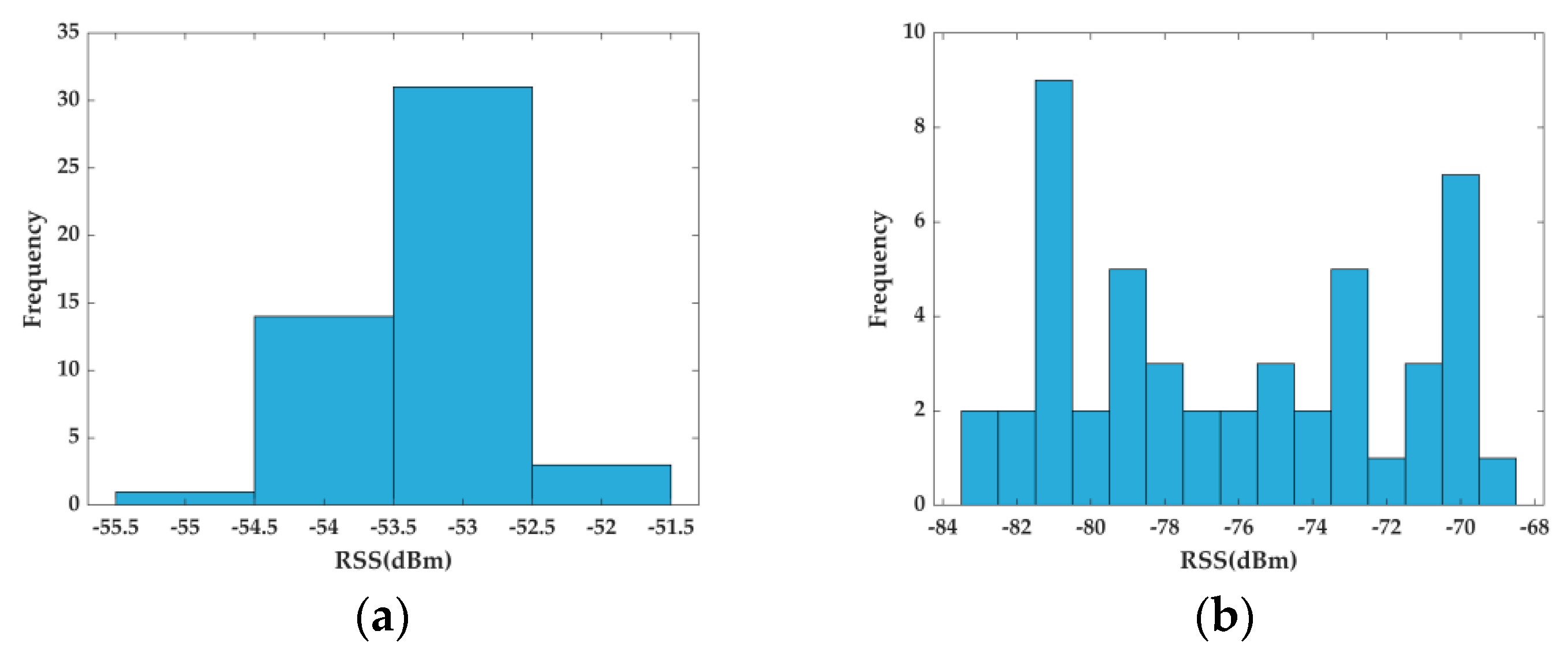
Figure 6, the test environment is a 36 m × 26.8 m rectangular floor where 4 Wi-Fi APs were deployed. There are ten rooms in this floor, and they are numbered from 1 to 10. When collecting the Wi-Fi RSS measurements, we selected 108 RPs and used a tablet to collect 50 RSSs for each RP. The Wi-Fi RSS detection range of our tablet is from −5 dBm to −95 dBm. For some RPs, less than 4 RSS measurements were obtained. To address this problem, we set the RSSs of the undetected APs to be −100 dBm.
In our offline training phase, the RSS database was divided into two parts, with 50 percent of the measurements put into the training dataset and the remaining data being in the test dataset. The performance of our method is compared with several baseline algorithms, including SVM, KNN, multilayer neural network (NN), K-Means [
27], Visibility [
31], and FCM [
29]. As mentioned in
Section 2, FCM evaluates the probability of a measurement belonging to a certain zone using a fuzzy algorithm, which could be considered as a hierarchical classification method. We improved the original FCM technique by adjusting its membership degree threshold to allow one RP to be clustered into multiple clustering categories (i.e., zone overlap is allowed).
For the benchmark methods and the proposed algorithm, four performance metrics are considered for comparison. They include the zone classification error rate, position classification accuracy, average positioning error and running time. The zone classification error rate is the percentage of the number of test RSS measurements assigned to zones that do not contain their true RPs. The position classification accuracy gives the percentage of test RSS measurements assigned to the correct RPs. The average positioning error is the average distance between the selected RPs for the test RSS measurements and their true RPs.
4.1. Area Division Result
Since the experimental environment is a rectangle and 4 Wi-Fi APs have been installed priorly, it can be naturally divided into 4 parts, which makes our choice of
in Algorithm 1 to be 4. Results of the improved K-Means clustering method are depicted in
Figure 7, where four zones are depicted in red, yellow, green and blue. The soft labelling nature of our algorithm is reflected by the existence of 4 overlapped areas with 22 RPs, which reduces the difficulty of zone classification and propagates more information rather than errors to the position classification level.
The step that evaluates in Algorithm 1 is a hard-thresholding process and the value of determines the size of the overlapped areas. When the numbers of RSS measurements from a RP in all clustering categories are less than , the RP would be left out. Therefore, in order to ensure that all the RPs are assigned into at least one zone, the value of must be in the suggested range given in Equation (4).
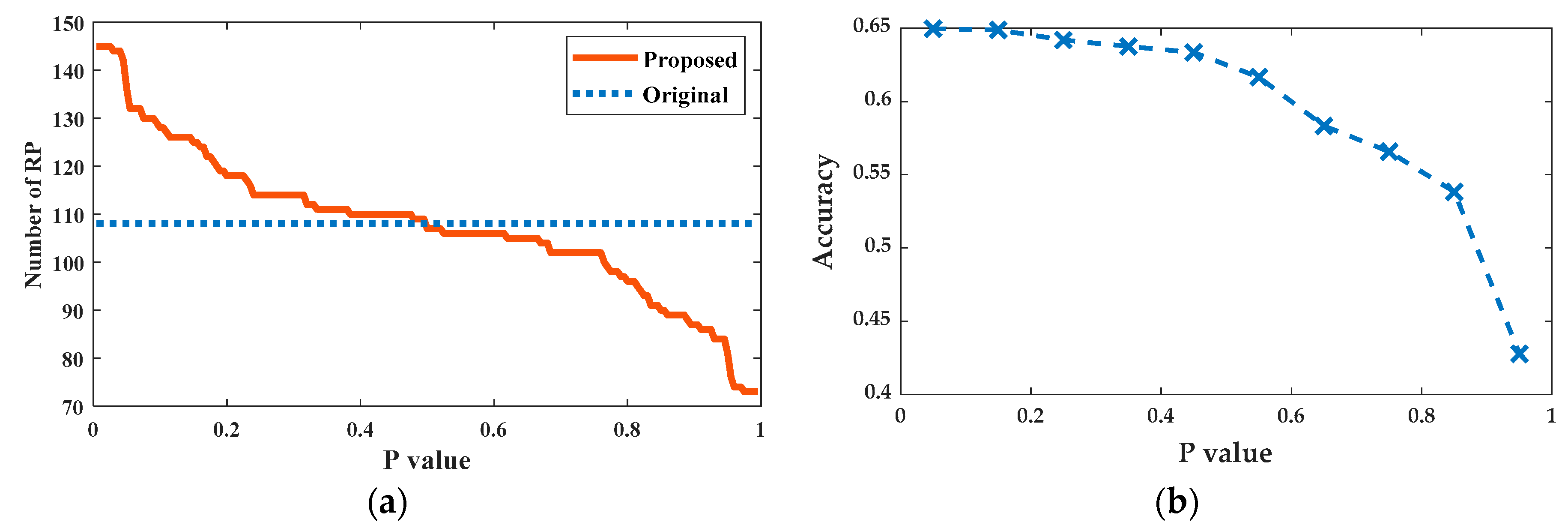
Figure 8a plots the total number of RPs in the four formed zones as a function of
. When
is small, the total number of RPs in four generated zones would be larger than the true RP number because the RPs in the overlap regions are counted more than once. With the increase of
, more RPs become left out, and the total number of RPs in the four zones decreases accordingly. When
is greater than 0.5, the total number of RPs in the four zones is less than the number of original RPs, indicating that there must be some RPs not assigned to any zones.
In
Figure 8b, we plot the position classification accuracy of the proposed localization method as a function of
. It can be seen that the position classification accuracy deteriorates marginally when
is less than 0.2 but significant performance degradation occurs after
increases over 0.5. The underlying reason is that when
is small, the increase in its value reduces slightly the size of the overlapped areas only, which would not greatly enlarge the zone classification error rate and as a result, the position classification accuracy does not decrease evidently. On the other hand, when
is sufficiently large, a few RPs would start to be left out. This increases the zone classification error rate and leads to degraded position classification accuracy.
4.2. Zone Classification Accuracy
An error in the zone classification stage will be propagated to and even amplified at a later stage under the hierarchical classification structure, which makes the accuracy of zone classification a very important performance indicator. We use 1NN as the zone classifier to compare the zone classification error rates of four hierarchical classification methods in consideration and the results are shown in
Table 1. As we can see, the FCM has the best performance with a zone classification error rate of 1%, followed by our proposed method with an error rate of 2.25%. FCM and the proposed method are both hierarchical classification approaches with zone overlap. This implies that allowing zone overlap when forming clusters using RSS measurements can effectively reduce the difficulty of the zone classification.
With the hierarchical classification with overlap, the accuracy of zone classification improves with the increase in the overlap regions. When the overlap region is large as the test environment, the number of zones reduces to one and the zone classification error rate will become zero, which renders the hierarchical classification meaningless. Actually, when the overlap regions are too large, the efficiency of the hierarchical classification will dramatically decrease as well (see
Section 4.3). In FCM, there are 70 RPs in the overlap regions, compared to 22 RPs in our method. This manifests as a higher zone classification accuracy of FCM. In the subsequent experiments, we shall further investigate the effect of overlap area size on the position classification accuracy and average positioning error.
4.3. Positioning Accuracy
In our experiment, the direct use of KNN, multilayer NN and SVM for flat classification-based object position estimation are selected as the benchmarks for performance evaluation. Specifically, the multilayer NN has 8 fully-connected hidden layers with 10, 18, 27, 35, 22, 16, 15 and 22 neurons, respectively, and they adopt the tanh activation function. The cross-entropy loss is employed in the training process, where 85% of the training data is used for optimizing the connection weights while the remaining 15% is applied for cross validation to avoid overfitting. In addition, we simulate three hierarchical localization methods, namely K-Means [
27], Visibility [
31] and FCM [
29]. Similar to the proposed technique, they adopt 1NN as the zone classifier and SVM as the position classifier. But they have different zone classification schemes (see
Section 2 for a survey). We conduct 5 randomized experiments, each with different RSS raw data selected to generate the training set and test set.
The averaged positioning performance results of the methods in consideration are summarized in
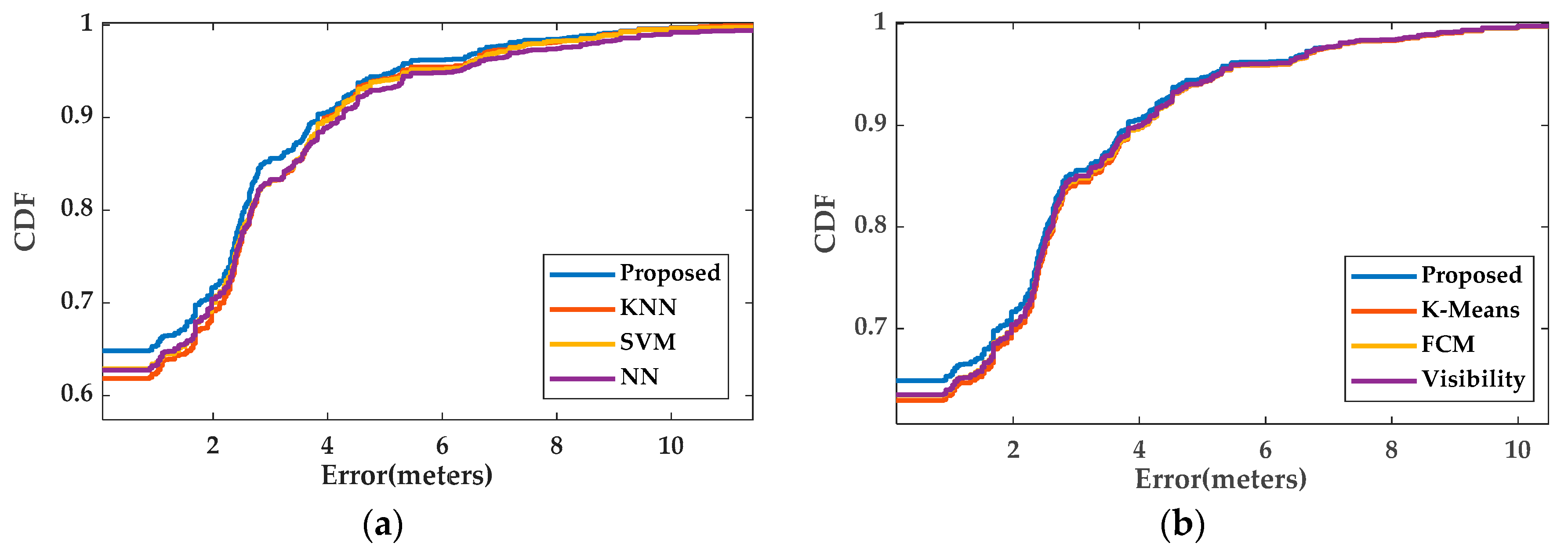
Table 2. The results reveal that the positioning performance of our method is better compared with other methods, reaching the highest position classification accuracy of 64.97% and the lowest average positioning error of around 1.29 m. Even though the improvement in terms of the position classification accuracy appears to be small (only 1.4%–3.2%), the proposed technique leads to at least 10% decrease in the average positioning error over other hierarchical classification-based methods while it offers at least 15% reduction in the average positioning error compared with flat-classification algorithms. The reason behind is that with improvement in the position classification accuracy, more RSS measurements would be assigned to their true RPs, which would greatly decrease the average positioning error as in this case, we have more cases with a positioning error of 0 m.
Another observation is that the performance of the multiplayer NN is inferior to those of the proposed method and even SVM. The underlying reasons could be as follows. (1) The amount of RSS measurements collected for the experiment may not be sufficient for the training of the multilayer NN to converge to a local optimum with good generalization capability. (2). The hierarchical nature of the indoor localization problem is not explored by the multilayer NN but it is explicitly accounted for in the development of the proposed method. Increasing the volume of the training dataset could be useful to obtain a multilayer NN with significantly enhanced performance and this would be subject to future measurement campaign and experiments.
It is worth mentioning that the zone classification error rate of the FCM-based method is the lowest among the considered techniques (see
Table 1), but its positioning performance is not the best. This is because (1) it generates regions with large overlap and this improves the accuracy of zone classification, but also makes the zone classification result unable to provide sufficient information for the following position determination; and (2) FCM still uses the mean values of the RSS measurements to characterize each RP, so it fails to explore the high-order statistical information in the raw data.
In
Figure 9, the cumulative probability distributions (CDFs) of the positioning errors from the benchmark methods and the proposed technique are depicted. Note that the values of the CDF curves at the positioning error of 0m correspond to the position classification accuracy. Again, the enhanced localization performance of the proposed algorithm over the existing techniques is evident.
4.4. Running Time
The running time is a key performance metric for an online system. We evaluate the running time of all the considered algorithms in the previous subsection. The obtained results are shown in
Table 3. Our test environment has 108 RPs. A direct use of SVM with the one-versus-one strategy requires
SVM binary classifiers, or equivalently a running time of 5.1 s. Compared with other methods, KNN and NN have the smallest running time, where the running time of KNN is only 0.08 s. However, due to the difficulty in finding efficient classification hyperplanes, their indoor positioning performance is inferior to the proposed technique. With the help of the hierarchical classification, the running time for one localization operation is reduced to less than 1 s, among which the K-Means requires the smallest amount. Due to the overlapped regions, the test environment is virtually expanded, and the running time is slightly longer than that of the hierarchical classification without zone overlap, as expected. However, our method still needs 0.77 s only in addition to significantly improved positioning accuracy, which achieves a better balance between the computational efficiency and performance.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}