Fast Implementation of Approximated Maximum Likelihood Parameter Estimation for Frequency Agile Radar under Jamming Environment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model Characterization
2.1. Signal Model
2.2. ML Parameter Estimation
3. Numerical Experiments
3.1. Deceptive Interference Suppression and Target Parameter Estimation for Frequency Agile Radar
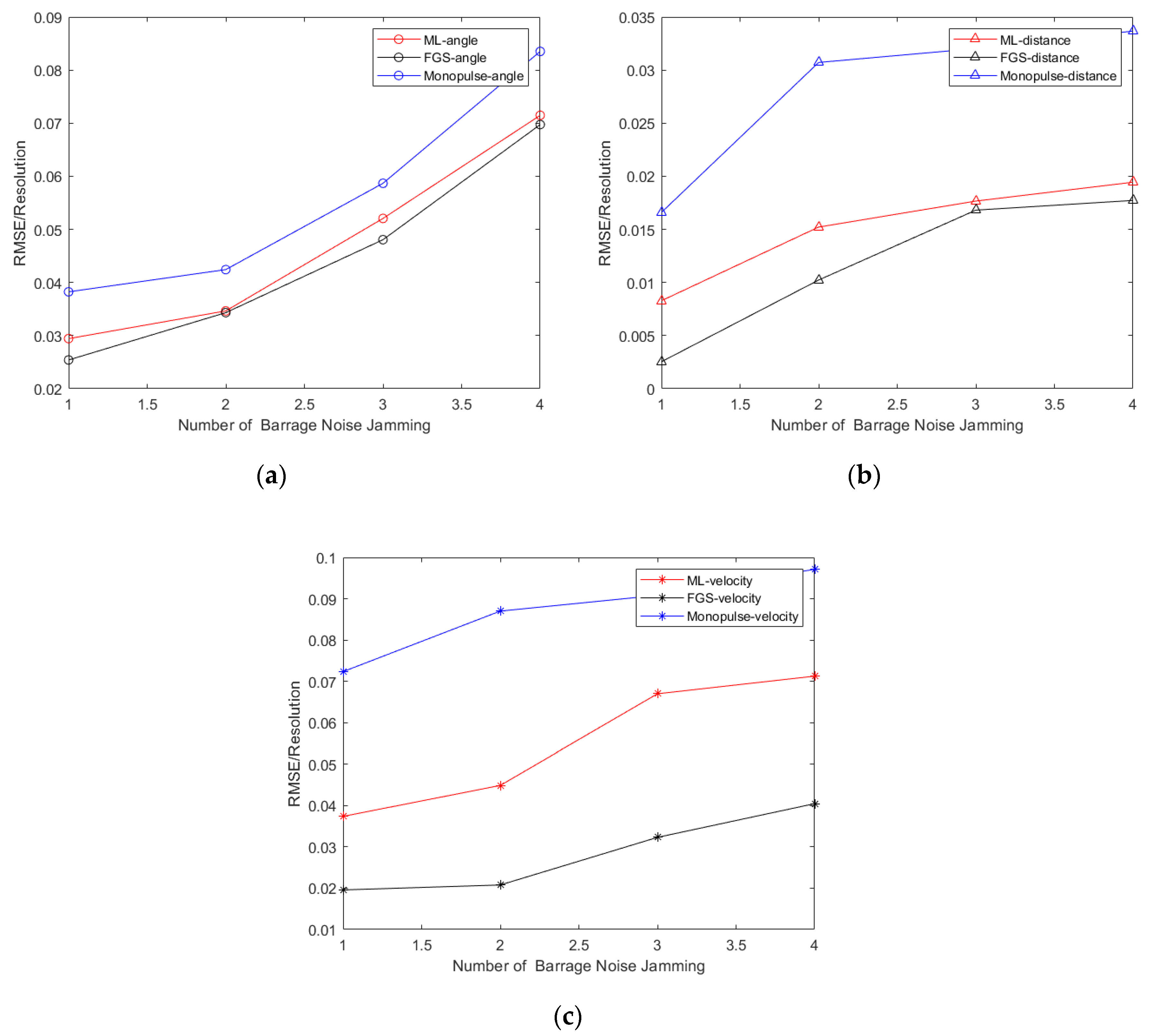
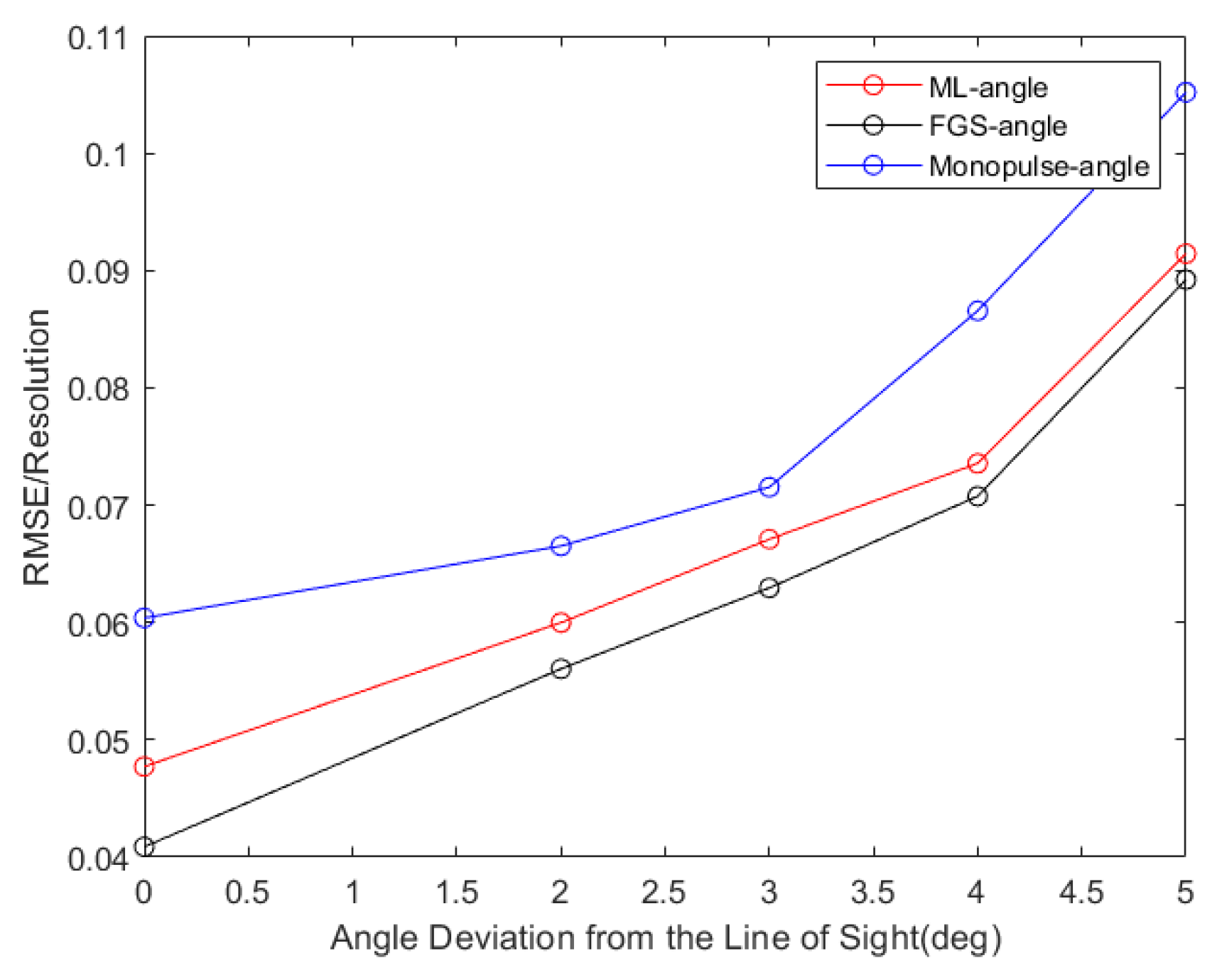
3.2. Estimation of Target Parameters in Various Conditions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tian, R.; Lin, C.; Bao, Q.; Chen, Z. A hybrid integration method of frequency agile radar for uniform moving target. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; pp. 1409–1413. [Google Scholar]
- Chen, S.; Liu, M.; Lu, F.; Xing, M. A Target Identification Method for the Millimeter Wave Seeker via Correlation Matching and Beam Pointing. Sensors 2019, 19, 2530. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sammartino, P.F.; Baker, C.J.; Griffiths, H.D. Frequency Diverse MIMO Techniques for Radar. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 201–222. [Google Scholar] [CrossRef]
- Akhtar, J.; Olsen, K.E. Frequency agility radar with overlapping pulses and sparse reconstruction. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 0061–0066. [Google Scholar]
- Levanon, N. Stepped-Frequency pulse-Train radar signal. IEE Proc.-Radar Sonar Navig. 2002, 149, 297–309. [Google Scholar] [CrossRef]
- Liu, Y.; Meng, H.; Li, G.; Wang, X. Range-Velocity estimation of multiple targets in randomised stepped-frequency radar. Electron. Lett. 2008, 44, 1032–1034. [Google Scholar] [CrossRef]
- Wang, D.; Lin, C.; Bao, Q.; Chen, Z. Long-Time coherent integration method for high-Speed target detection using frequency agile radar. Electron. Lett. 2016, 52, 960–962. [Google Scholar] [CrossRef]
- Ahmed, S. Novel noncoherent radar pulse integration to combat noise jamming. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2350–2359. [Google Scholar] [CrossRef]
- Lv, Q.; Qin, H. A Joint Method Based on Time-Frequency Distribution to Detect Time-Varying Interferences for GNSS Receivers with a Single Antenna. Sensors 2019, 19, 1946. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, C.; Xu, C.; Xu, J. A Matched-Filter-Based Coherent Integration Method for Passive Bistatic Radar Using Frequency-Agile Radar as the Illuminator. J. Phys. Conf. Ser. 2019, 1169. [Google Scholar] [CrossRef]
- Fischman, M.; Chan, S.; Huang, N.; Pak, K. Frequency-Agile Radar Electronics for the Soil Moisture Active Passive (SMAP) Mission. IEEE Trans. Geosci. Remote Sens. 2015, 3, 10–19. [Google Scholar] [CrossRef]
- Zhou, B.; Li, R.; Dai, L.; Li, H. Combining sum-difference and auxiliary beam adaptive monopulse algorithm at subarray level for anti-Jamming. In Proceedings of the 2014 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 277–282. [Google Scholar]
- Fante, R.L. Synthesis of adaptive monopulse patterns. IEEE Trans. Antennas Propag. 1999, 47, 773–774. [Google Scholar] [CrossRef]
- Qian, L.; Xiu, J.; Xia, X.; Sun, W.; Long, T.; Peng, Y. Wideband-Scaled radon-Fourier transform for high-Speed radar target detection. IET Radar Sonar Navig. 2014, 8, 501–512. [Google Scholar] [CrossRef]
- Huang, P.; Dong, S.; Liu, X.; Jiang, X.; Liao, G.; Xu, H.; Sun, S. A Coherent Integration Method for Moving Target Detection Using Frequency Agile Radar. IEEE Geosci. Remote Sens. Lett. 2019, 16, 206–210. [Google Scholar] [CrossRef]
- Li, D.; Liao, G.; Wang, W.; Xu, Q.; Zhang, X. High Range Resolution Profiling of Moving Targets Via Compressive Sensing in Stepped Frequency Radar. IFAC Proc. Vol. 2013, 46, 7–11. [Google Scholar] [CrossRef]
- Chen, T.; Yang, J.; Guo, M. A MIMO Radar-Based DOA Estimation Structure Using Compressive Measurements. Sensors 2019, 19, 4706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Butt, F.A.; Naqvi, I.H.; Najam, A.I. Radar ECCM against deception jamming: A novel approach using bi-Static and mono-Static radars. In Proceedings of the 2012 15th International Multitopic Conference (INMIC), Islamabad, Punjab, Pakistan, 13–15 December 2012; pp. 137–141. [Google Scholar]
- Djeddou, M.; Aouada, S.; Zoubir, A. Maximum likelihood angle-frequency parameter estimation in unknown noise fields for low-Elevation target tracking. In Proceedings of the Seventh International Symposium on Signal Processing and Its Applications, Paris, France, 4 July 2003; Volume 2, pp. 419–422. [Google Scholar]
- Ward, J. Space-time adaptive processing for airborne radar. In Proceedings of the 1995 International Conference on Acoustics, Speech, and Signal Processing, Detroit, MI, USA, 9–12 May 1995; Volume 5, pp. 2809–2812. [Google Scholar]
- Stoica, P.; Gershman, A.B. Maximum-Likelihood DOA estimation by data-supported grid search. IEEE Signal Process. Lett. 1999, 6, 273–275. [Google Scholar] [CrossRef]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Wu, J.; Suo, Z.; Liu, X. Fast Implementation of Approximated Maximum Likelihood Parameter Estimation for Frequency Agile Radar under Jamming Environment. Sensors 2020, 20, 2022. https://doi.org/10.3390/s20072022
Zhao Y, Wu J, Suo Z, Liu X. Fast Implementation of Approximated Maximum Likelihood Parameter Estimation for Frequency Agile Radar under Jamming Environment. Sensors. 2020; 20(7):2022. https://doi.org/10.3390/s20072022
Chicago/Turabian StyleZhao, Yang, Jianxin Wu, Zhiyong Suo, and Xiaoyu Liu. 2020. "Fast Implementation of Approximated Maximum Likelihood Parameter Estimation for Frequency Agile Radar under Jamming Environment" Sensors 20, no. 7: 2022. https://doi.org/10.3390/s20072022
APA StyleZhao, Y., Wu, J., Suo, Z., & Liu, X. (2020). Fast Implementation of Approximated Maximum Likelihood Parameter Estimation for Frequency Agile Radar under Jamming Environment. Sensors, 20(7), 2022. https://doi.org/10.3390/s20072022