Orbit Angular Momentum MIMO with Mode Selection for UAV-Assisted A2G Networks


Abstract
:
1. Introduction
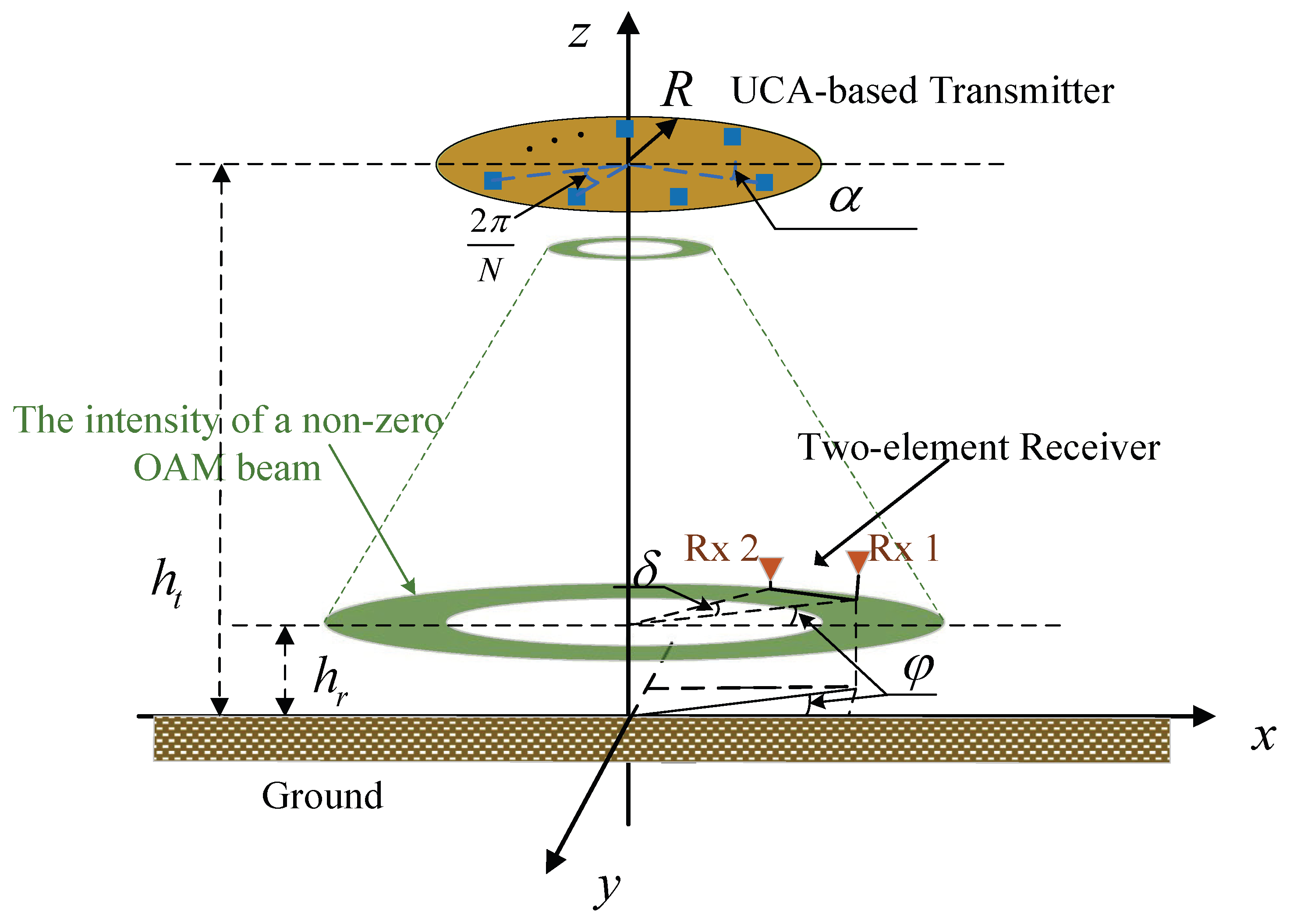
2. System Model and Problem Formulation
2.1. The LOS A2G Channel
2.2. A2G-RV Channel
3. Capacity and Mode Selection
3.1. Exact Upper Bounds
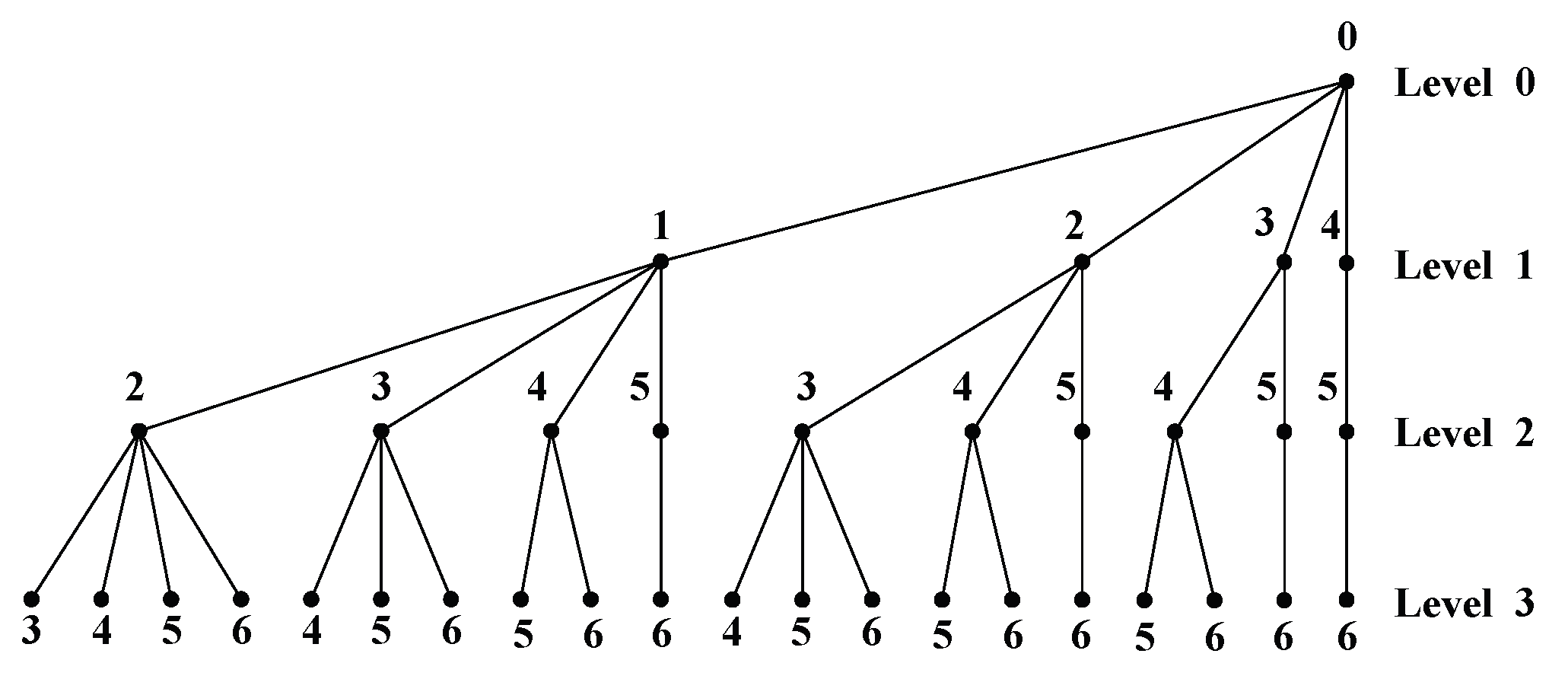
3.2. The Branch and Bound Search for Mode Selection
3.2.1. Selection of the Sub-Criterion Function
3.2.2. Construction of the Criterion Function
3.2.3. Proof of Monotonicity
3.2.4. Searching Procedure
| Algorithm 1 The BBS-MS scheme | |
| Require: | |
| 1: | Initialization parameters: , , , , , , , and the discared mode index set |
| 2: | |
| 3: | |
| 4: | |
| 5: | |
| 6: | if then |
| 7: | |
| 8: | if then |
| 9: | |
| 10: | update |
| 11: | |
| 12: | end if |
| 13: | else |
| 14: | |
| 15: | sort in a desend order to get an ordered index set |
| 16: | |
| 17: | for do |
| 18: | |
| 19: | if then |
| 20: | |
| 21: | update the index set |
| 22: | , and |
| 23: | |
| 24: | |
| 25: | |
| 26: | , go to line 6 |
| 27: | else |
| 28: | break the loop |
| 29: | end if |
| 30: | end for |
| 31: | end if |
| 32: | Output: the final mode index set |
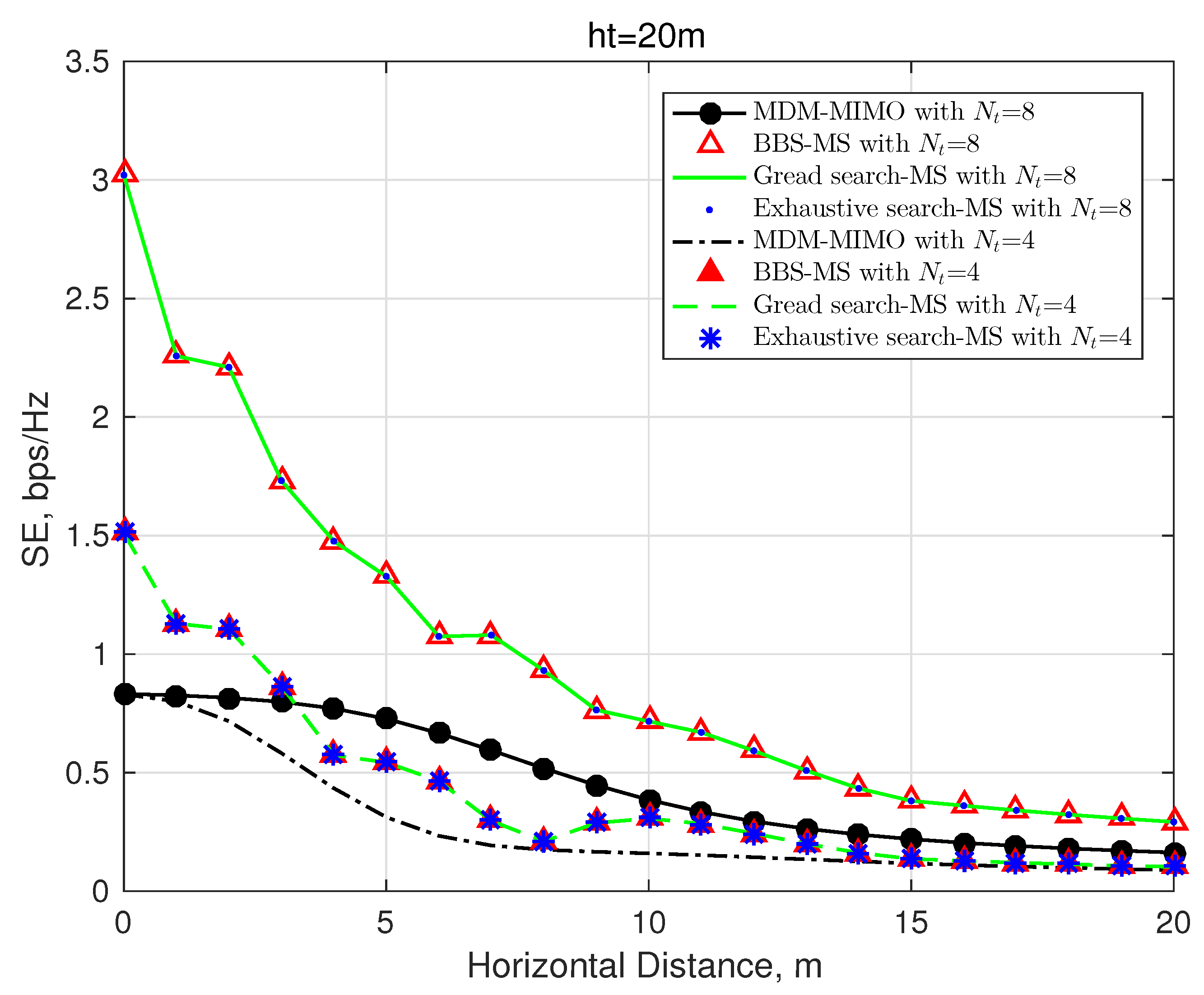
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Thidé, B.; Tamburini, F.; Then, H.; Someda, C.G.; Ravanelli, R.A. The physics of angular momentum radio. In Proceedings of the 2015 1st URSI Atlantic Radio Science Conference (URSI AT-RASC), Las Palmas, Gran Canaria, Spain, 16–24 May 2015. [Google Scholar]
- Tamburini, F.; Mari, E.; Sponselli, A.; Thidé, B.; Bianchini, A.; Romanato, F. Encoding many channels in the same frequency through radio vorticity: First experimental test. New J. Phys. 2011, 14, 78001–78004. [Google Scholar]
- Zhu, Q.; Jiang, T.; Qu, D.; Chen, D.; Zhou, N. Radio Vortex–Multiple-Input Multiple-Output Communication Systems with High Capacity. IEEE Access 2015, 3, 2456–2464. [Google Scholar] [CrossRef]
- Gaffoglio, R.; Cagliero, A.; Vita, A.D.; Sacco, B. OAM multiple transmission using uniform circular arrays: Numerical modeling and ex- perimental verification with two digital television signals. Radio Sci. 2016, 51, 645–658. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Zhang, Y.; Fu, C.L.; Bai, Z.; Li, Z.; Liao, C.; Wang, Y.; He, J.; Liu, Y.; Wang, Y. Temperature Insensitivity Polarization-Controlled Orbital Angular Momentum Mode Converter Based on an LPFG Induced in Four-Mode Fiber. Sensors 2018, 18, 1766. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Yang, J.Y.; Fazal, I.M.; Ahmed, N.; Yan, Y.; Huang, H.; Ren, Y.; Yue, Y.; Dolinar, S.; Tur, M.; et al. Terabit free-space data transmission employing orbital angular momentum multiplexing. Nat. Photonics 2012, 6, 488–496. [Google Scholar] [CrossRef]
- Zhang, W.T.; Zheng, S.L.; Hui, X.N.; Dong, R.; Jin, X.; Chi, H.; Zhang, X. Mode Division Multiplexing Communication Using Microwave Orbital Angular Momentum: An Experimental Study. IEEE Trans. Wirel. Commun. 2017, 16, 1308–1318. [Google Scholar] [CrossRef]
- Yan, Y.; Xie, G.; Lavery, M.; Huang, H.; Ahmed, N.; Bao, C.; Ren, Y.; Cao, Y.; Li, L.; Zhao, Z.; et al. High-capacity millimetre-wave communications with orbital angular momentum multiplexing. Nat. Commun. 2014, 5, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, T.; Wang, Y.; Liao, X.; Zhang, J.; Song, Q.L. OFDM-OAM modulation for future wireless communications. IEEE Access 2019, 7, 59114–59125. [Google Scholar] [CrossRef]
- Bu, X.; Zhang, Z.; Liang, X.D.; Chen, L.; Tang, H.; Zeng, Z.; Wang, J. A Novel Scheme for MIMO-SAR Systems Using Rotational Orbital Angular Momentum. Sensors 2018, 18, 3511. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Cheng, Y.; Li, X.D.; Qin, Y.; Wang, H.; Jiang, Y. Generation of Orbital Angular Momentum Beams for Electromagnetic Vortex Imaging. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1873–1876. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2018, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Zhang, Z.C.; Wu, L.; Dang, J. Three-dimensional geometry-based UAV-MIMO channel modeling for A2G communication environments. IEEE Commun. Lett. 2018, 7, 1438–1441. [Google Scholar] [CrossRef]
- Liu, Y.W.; Qin, Z.J.; Cai, Y.L. UAV communications based on non-orthogonal multiple access. IEEE Wirel. Commun. 2019, 26, 52–57. [Google Scholar] [CrossRef] [Green Version]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. On the Use of Rotary-Wing Aircraft to Sample Near-Surface Thermodynamic Fields: Results from Recent Field Campaigns. Sensors 2019, 19, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alaoui-Sosse, S.; Durand, P.; Medina, P.; Pastor, P.; Lothon, M.; Cernov, I. OVLI-TA: An Unmanned Aerial System for Measuring Profiles and Turbulence in the Atmospheric Boundary Layer. Sensors 2019, 19, 581. [Google Scholar] [CrossRef] [Green Version]
- Rautenberg, A.; Schön, M.; zum Berge, K.; Mauz, M.; Manz, P.; Platis, A.; van Kesteren, B.; Suomi, I.; Kral, S.T.; Bange, J. The Multi-Purpose Airborne Sensor Carrier MASC-3 for Wind and Turbulence Measurements in the Atmospheric Boundary Layer. Sensors 2019, 19, 2292. [Google Scholar] [CrossRef] [Green Version]
- Rautenberg, A.; Graf, M.S.; Wildmann, N.; Platis, A.; Bange, J. Reviewing Wind Measurement Approaches for Fixed-Wing Unmanned Aircraft. Atmosphere 2018, 9, 422. [Google Scholar] [CrossRef] [Green Version]
- Witte, B.M.; Singler, R.F.; Bailey, S.C.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef] [Green Version]
- Nolan, P.J.; McClelland, H.G.; Woolsey, C.A.; Ross, S.D. A Method for Detecting Atmospheric Lagrangian Coherent Structures Using a Single Fixed-Wing Unmanned Aircraft System. Sensors 2019, 19, 1607. [Google Scholar] [CrossRef] [Green Version]
- Nolan, P.J.; Pinto, J.; González-Rocha, J.; Jensen, A.; Vezzi, C.N.; Bailey, S.C.C.; De Boer, G.; Diehl, C.; Laurence, R., III; Powers, C.W.; et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors 2018, 18, 4448. [Google Scholar] [CrossRef] [Green Version]
- Schuyler, T.J.; Gohari, S.M.I.; Pundsack, G.; Berchoff, D.; Guzman, M.I. Using a Balloon-Launched Unmanned Glider to Validate Real-Time WRF Modeling. Sensors 2019, 19, 1914. [Google Scholar] [CrossRef] [PubMed]
- Schuyler, T.J.; Bailey, S.C.C.; Guzman, M.I. Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign. Atmosphere 2019, 10, 434. [Google Scholar] [CrossRef] [Green Version]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A.A. 3D Trajectory Planning Method for UAVs Swarm in Building Emergencies. IEEE Access 2020, 20, 642. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Da Rosa, R.; Aurelio Wehrmeister, M.; Brito, T.; Lima, J.L.; Pereira, A.I.P.N. Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles. Sensors 2020, 20, 907. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Challita, U.; Saad, W. Network formation in the Sky: Unmanned aerial vehicles for multi-hop wireless backhauling. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), Singapore, 4–8 December 2017. [Google Scholar]
- Ge, X.H.; Zi, R.; Xiong, X.S.; Li, Q.; Wang, L. Millimeter wave communications with OAM-SM scheme for future mobile networks. IEEE J. Sel. Areas Commun. 2017, 35, 2163–2177. [Google Scholar] [CrossRef] [Green Version]
- Gharavi-Alkhansari, M.; Gershman, A.B. Fast antenna subset selection in MIMO systems. IEEE Trans. Signal Process. 2004, 52, 339–347. [Google Scholar] [CrossRef]
- Molisch, A.F.; Win, M.Z.; Winters, J.H. Capacity of MIMO systems with antenna selection. IEEE Trans. Wirel. Commun. 2005, 4, 1759–1772. [Google Scholar] [CrossRef] [Green Version]
- Pal, R.; Srinivas, K.V.; Chaitanya, A.K. A Beam Selection Algorithm for Millimeter-Wave Multi-user MIMO Systems. IEEE Commun. Let. 2018, 22, 852–855. [Google Scholar] [CrossRef]
- Narendra, P.M.; Fukunaga, K. A Branch and Bound Algorithm for Feature Subset Selection. IEEE Trans. Comput. 1977, 26, 917–922. [Google Scholar] [CrossRef]
- Gao, Y.; Khaliel, M.; Zheng, F.; Kaiser, T. Rotman Lens Based Hybrid Analog-Digital Beamforming in Massive MIMO Systems: Array Architectures, Beam Selection Algorithms and Experiments. IEEE Trans. Veh. Technol. 2017, 66, 9134–9148. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| The number of transmitting antennas | |
| The number of receiving antennas | |
| The number of the available modes | |
| The relative rotation angle | |
| The radius of the transmitter array | |
| The transmission SNR | SNR = 20 dB |
| The altitude of the ground user | m |
| The altitude of the drone | m |
| The centre frequency of carrier wave | GHz |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, T.; Wang, Y.; Ma, B.; Zhang, J. Orbit Angular Momentum MIMO with Mode Selection for UAV-Assisted A2G Networks. Sensors 2020, 20, 2289. https://doi.org/10.3390/s20082289
Hu T, Wang Y, Ma B, Zhang J. Orbit Angular Momentum MIMO with Mode Selection for UAV-Assisted A2G Networks. Sensors. 2020; 20(8):2289. https://doi.org/10.3390/s20082289
Chicago/Turabian StyleHu, Tao, Yang Wang, Bo Ma, and Jie Zhang. 2020. "Orbit Angular Momentum MIMO with Mode Selection for UAV-Assisted A2G Networks" Sensors 20, no. 8: 2289. https://doi.org/10.3390/s20082289
APA StyleHu, T., Wang, Y., Ma, B., & Zhang, J. (2020). Orbit Angular Momentum MIMO with Mode Selection for UAV-Assisted A2G Networks. Sensors, 20(8), 2289. https://doi.org/10.3390/s20082289