
Star Sensor Denoising Algorithm Based on Edge Protection

Abstract
:1. Introduction
2. Materials and Methods
2.1. Side Window Filtering Principle
2.2. The Proposed Improved Gaussian Side Window Filtering Algorithm
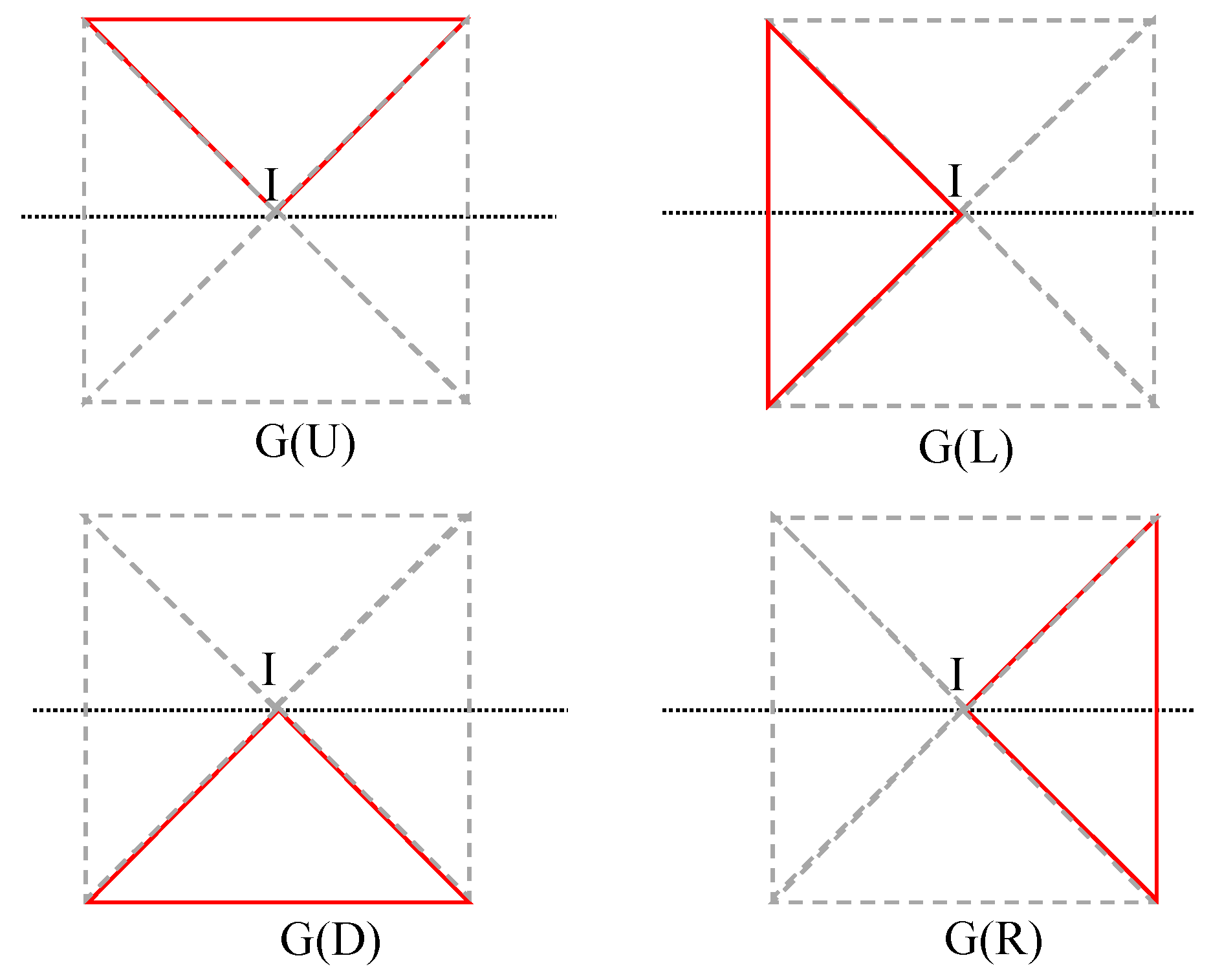
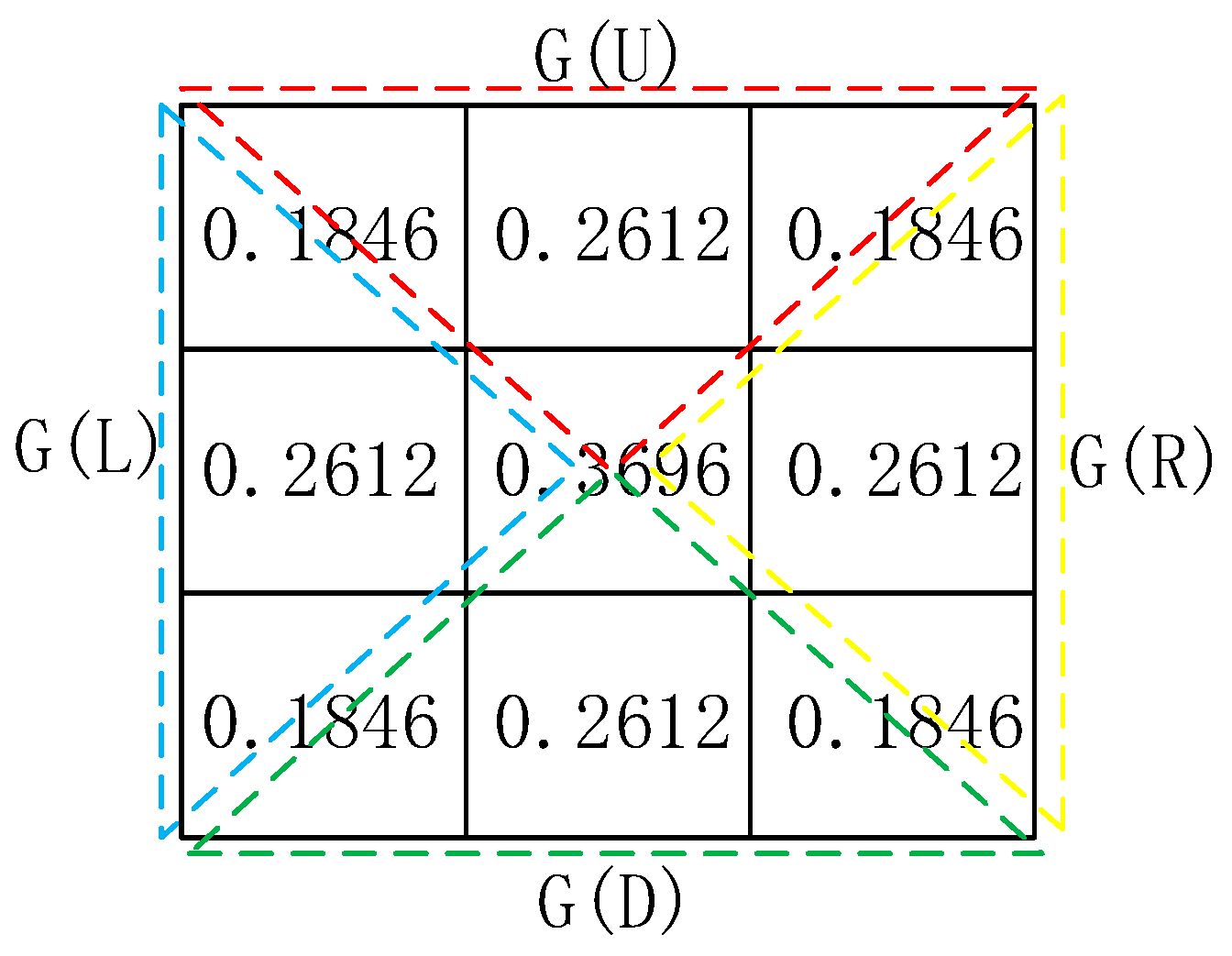
2.2.1. Filter Template Design
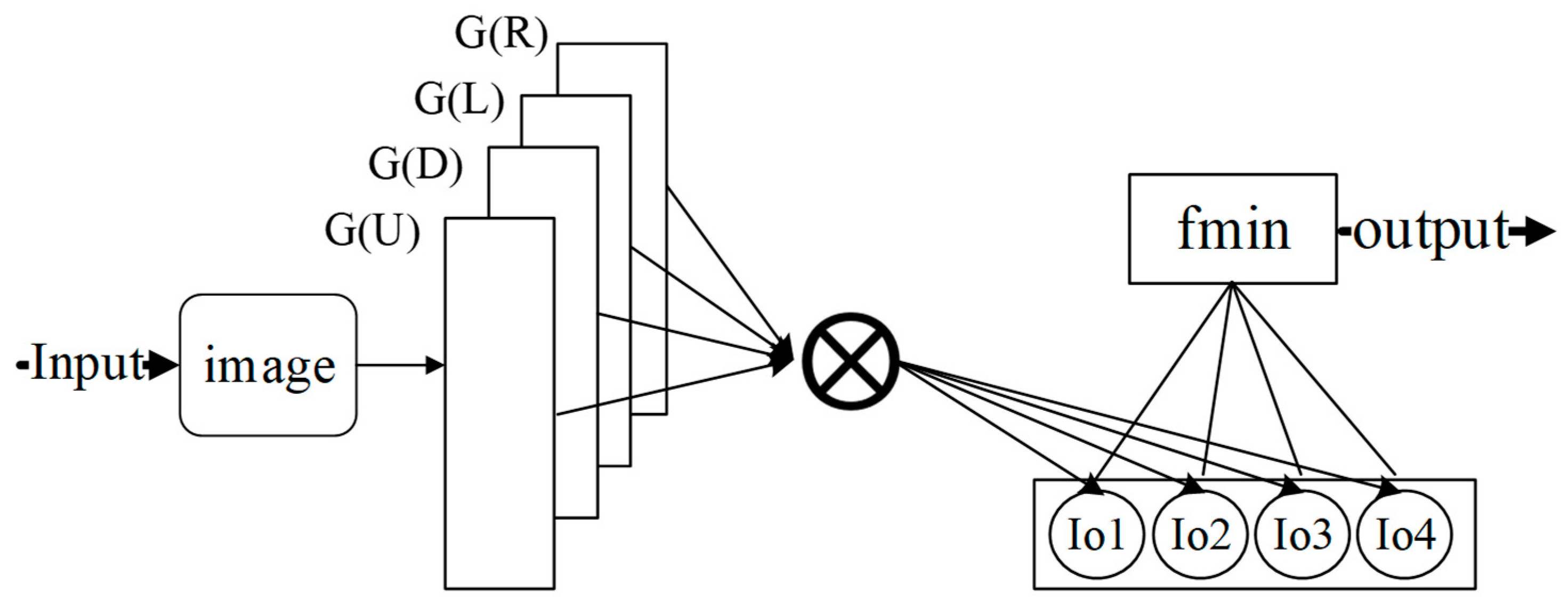
2.2.2. Improved Gaussian Side Window Filtering Steps
2.2.3. Reconstruction Function Calculation
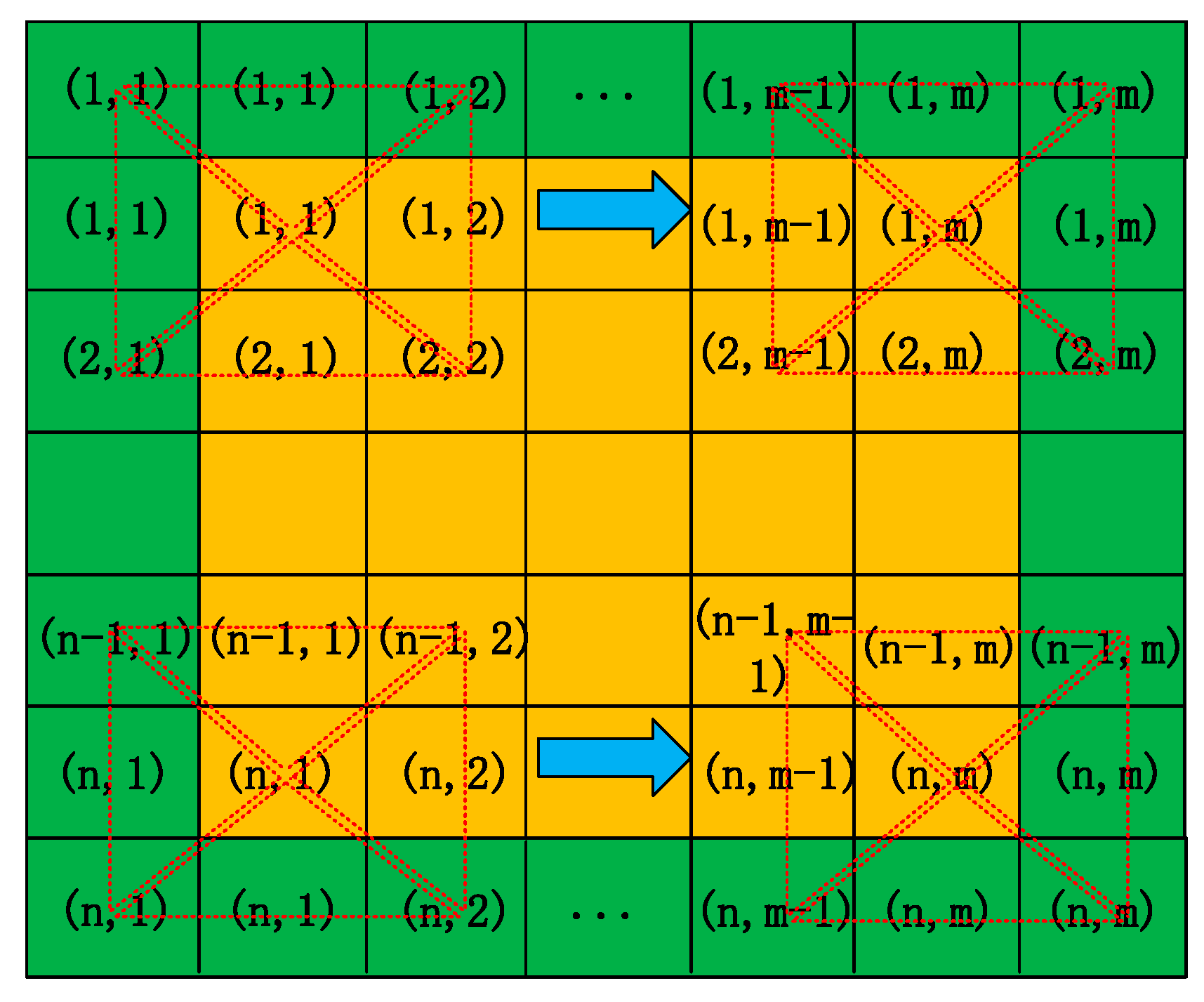
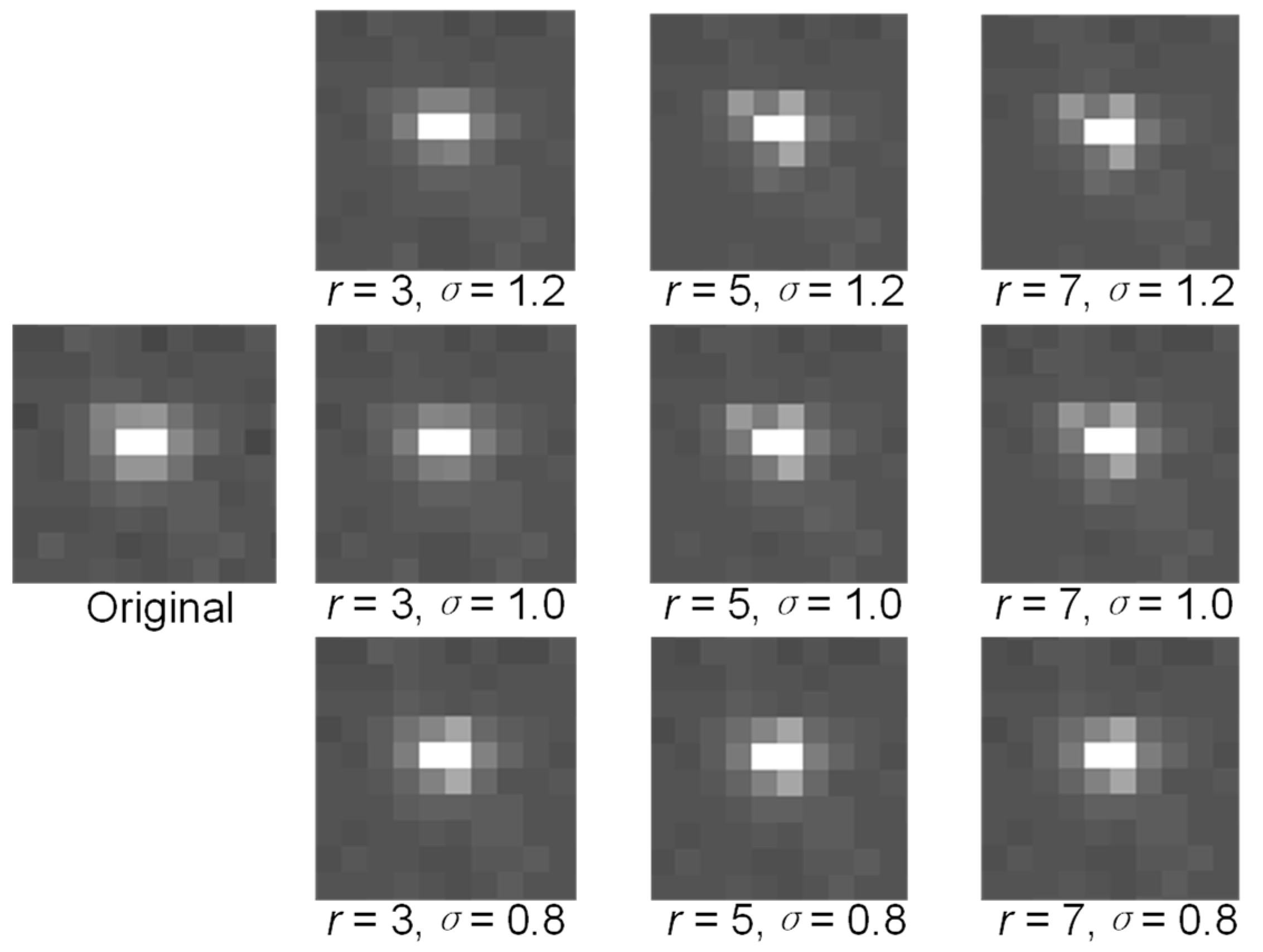
2.2.4. Filter Window Parameter Selection
3. Results
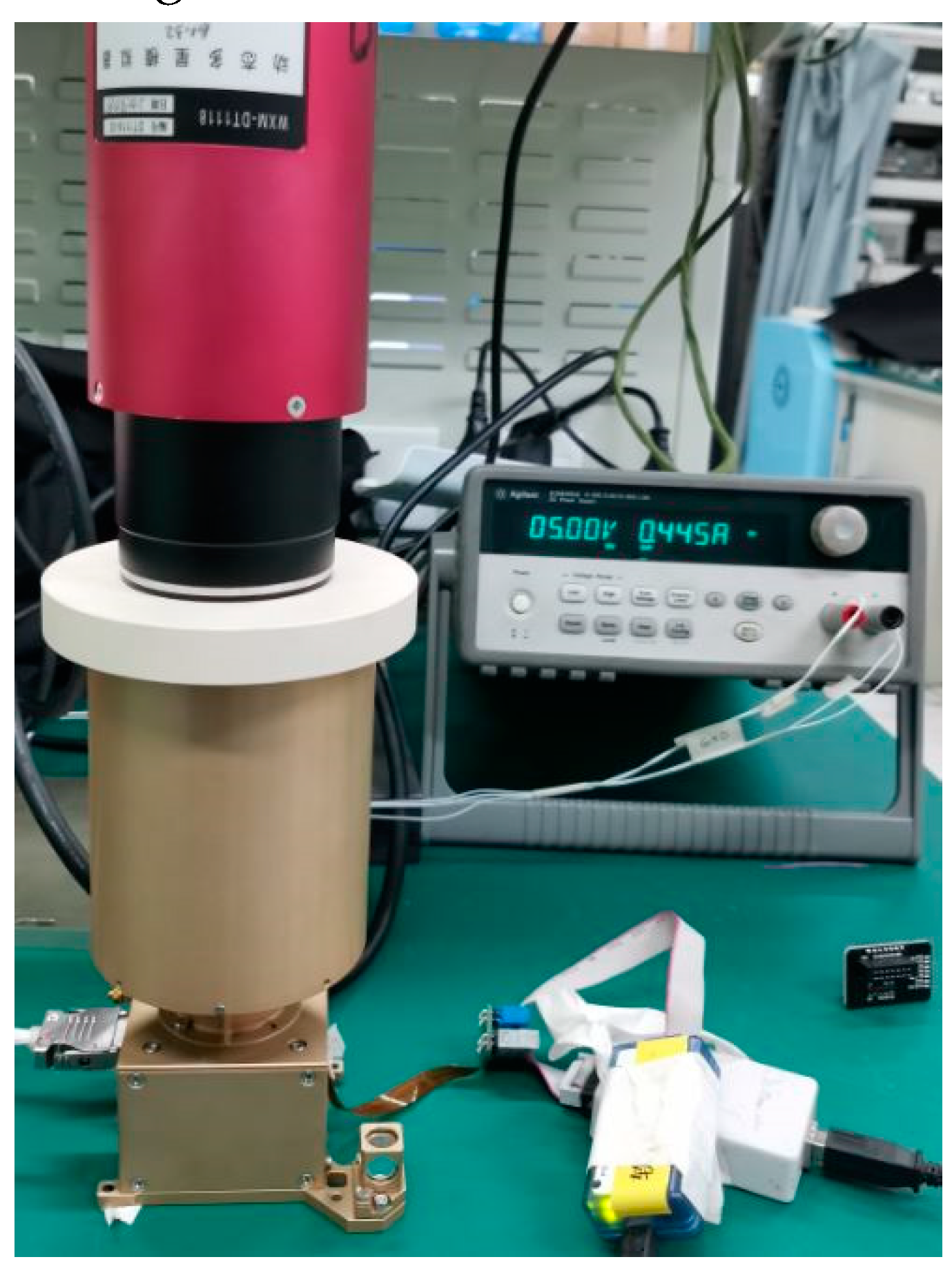
3.1. Experimental Conditions
3.2. Simulation Experiment
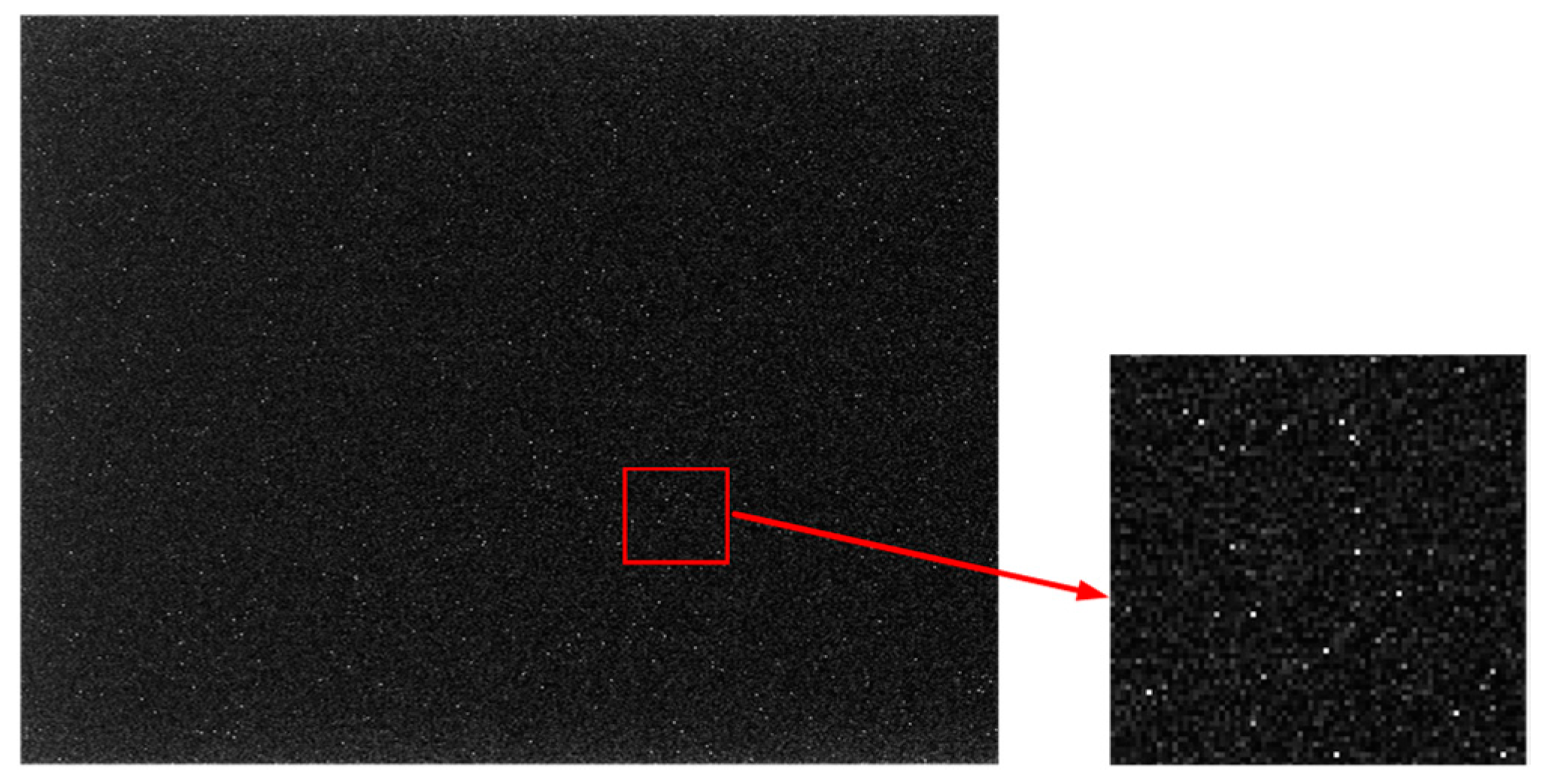
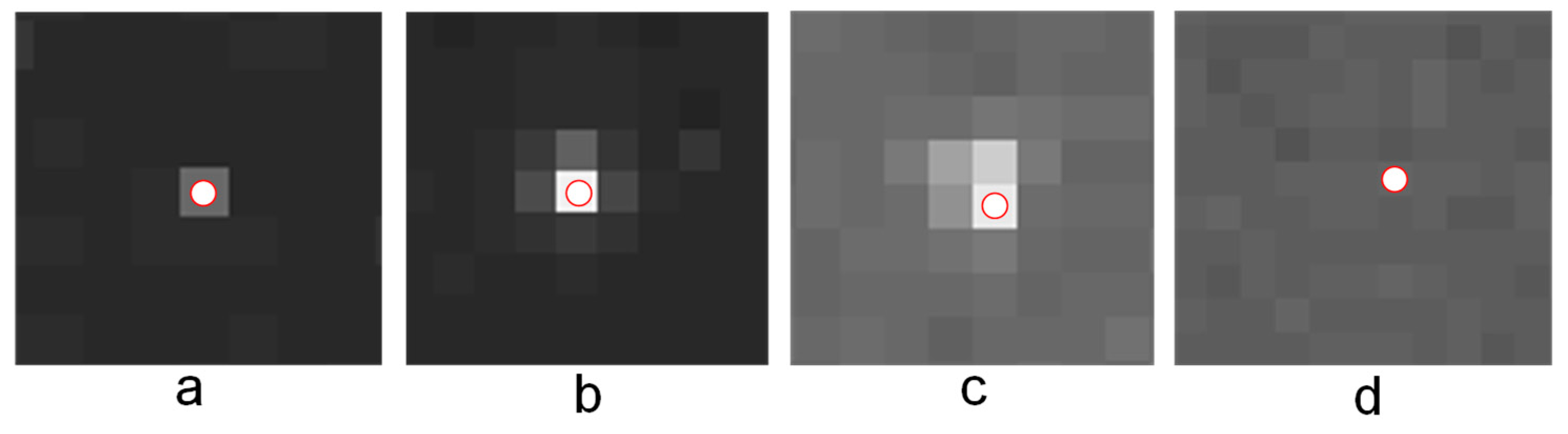
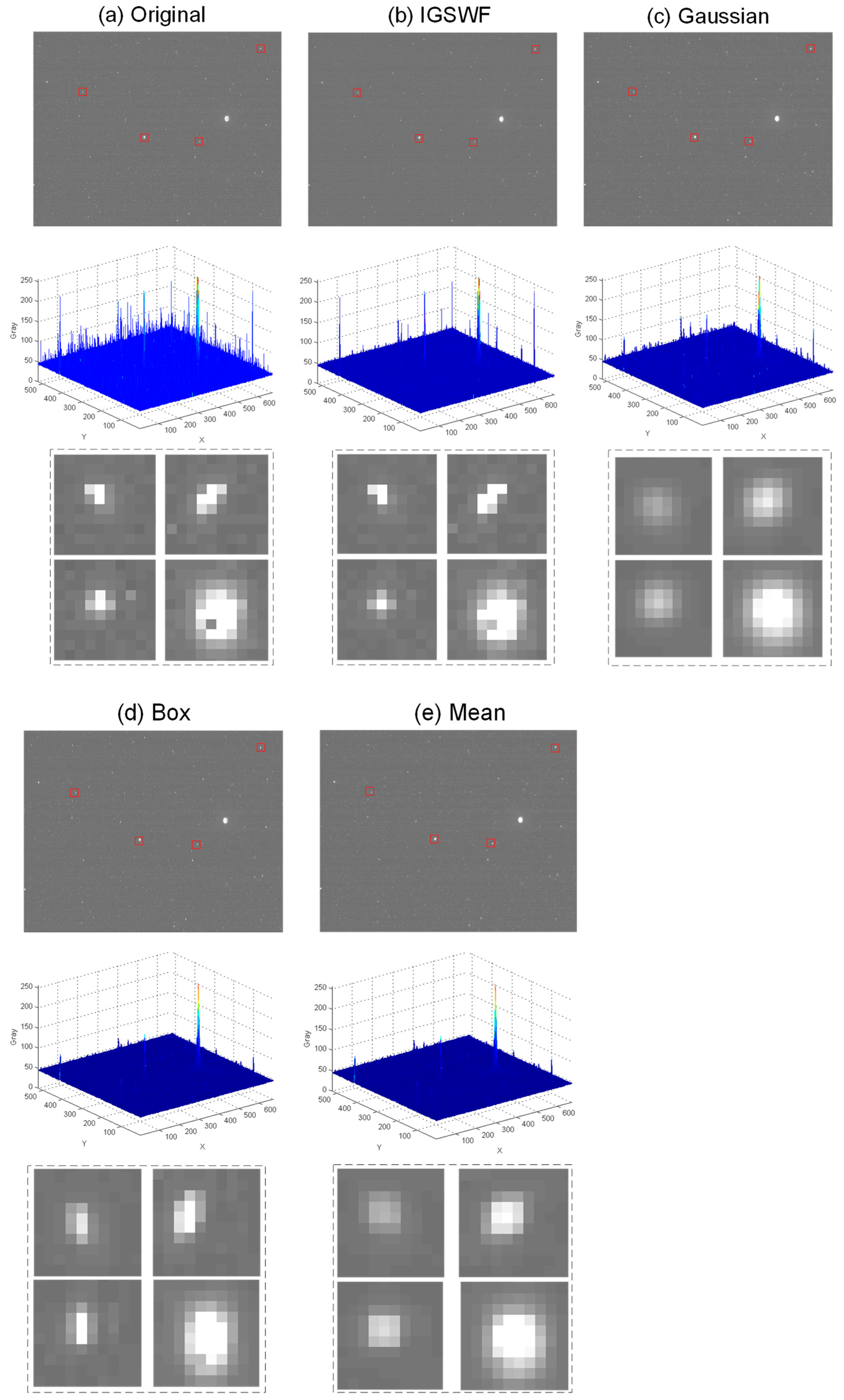
3.2.1. Denoising Effect on the Star Image
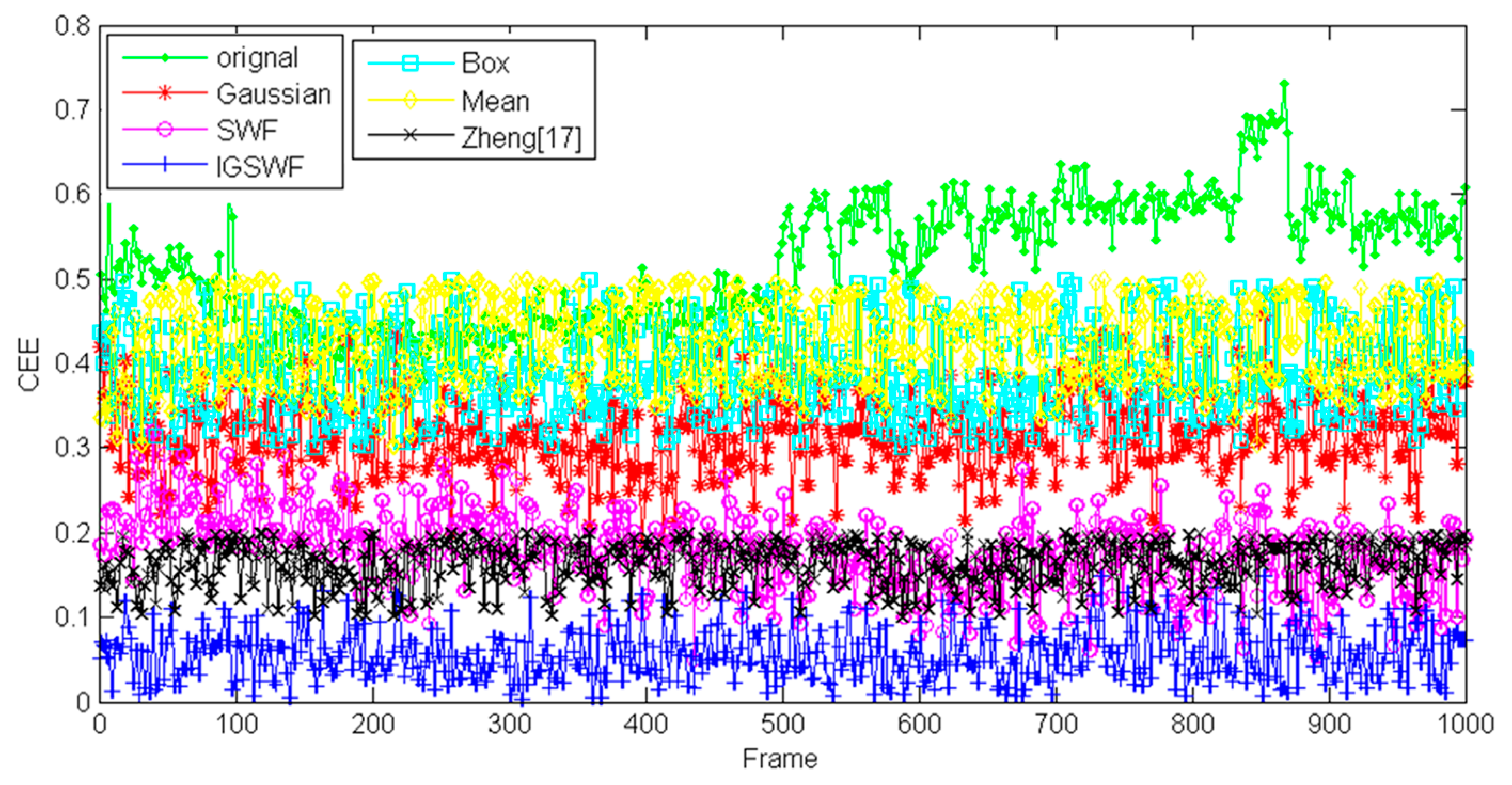
3.2.2. Comparison with Other Algorithms
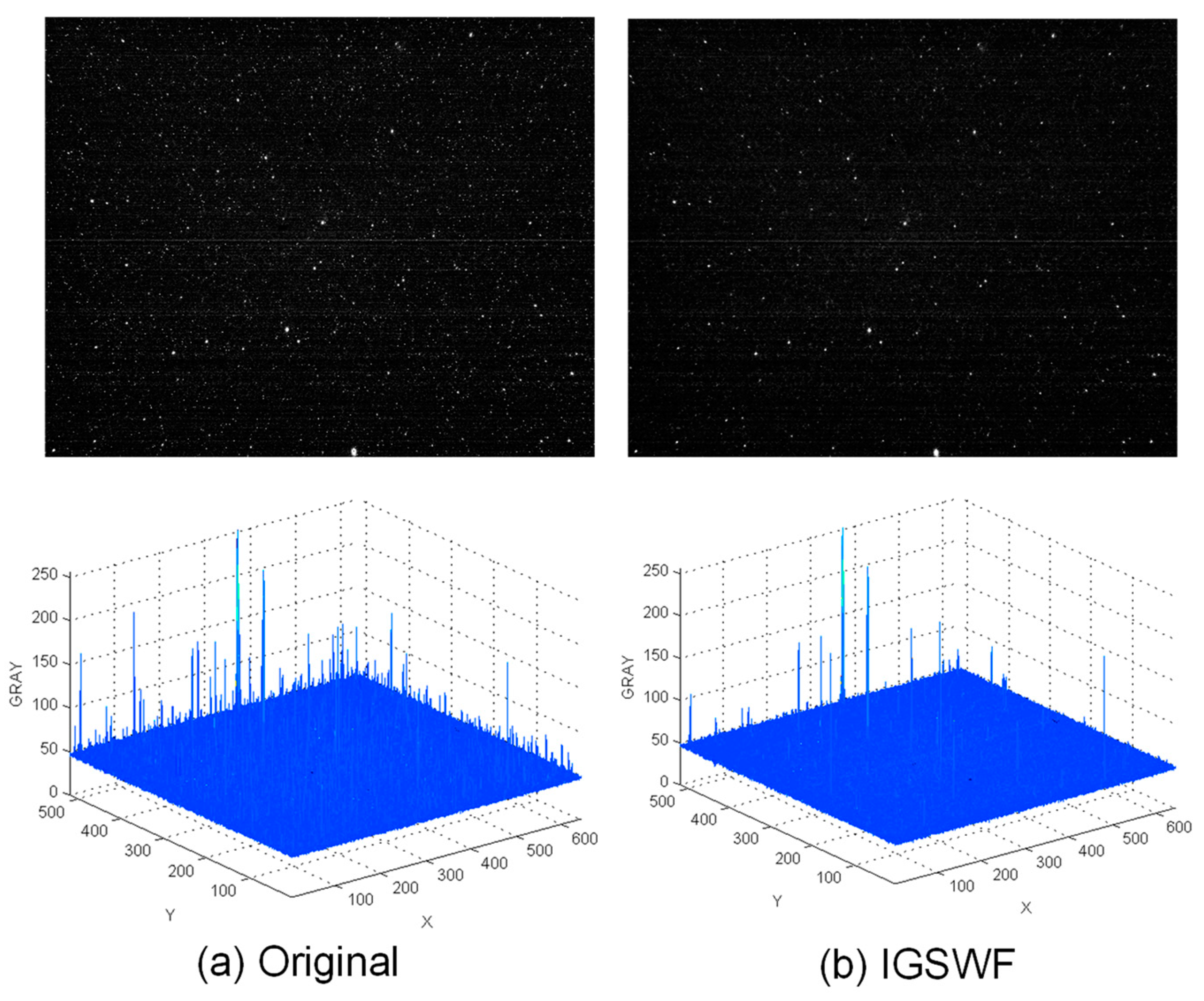
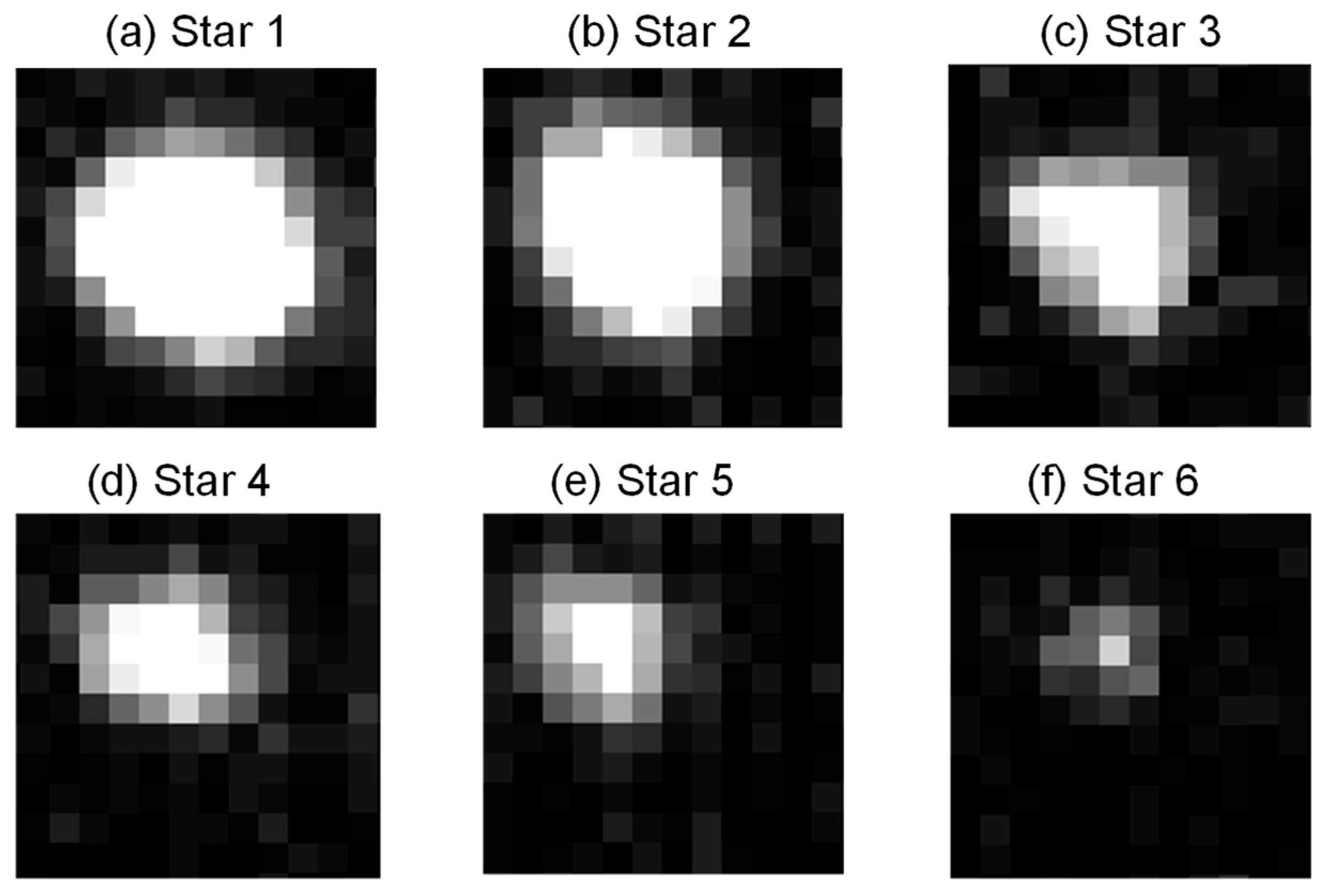
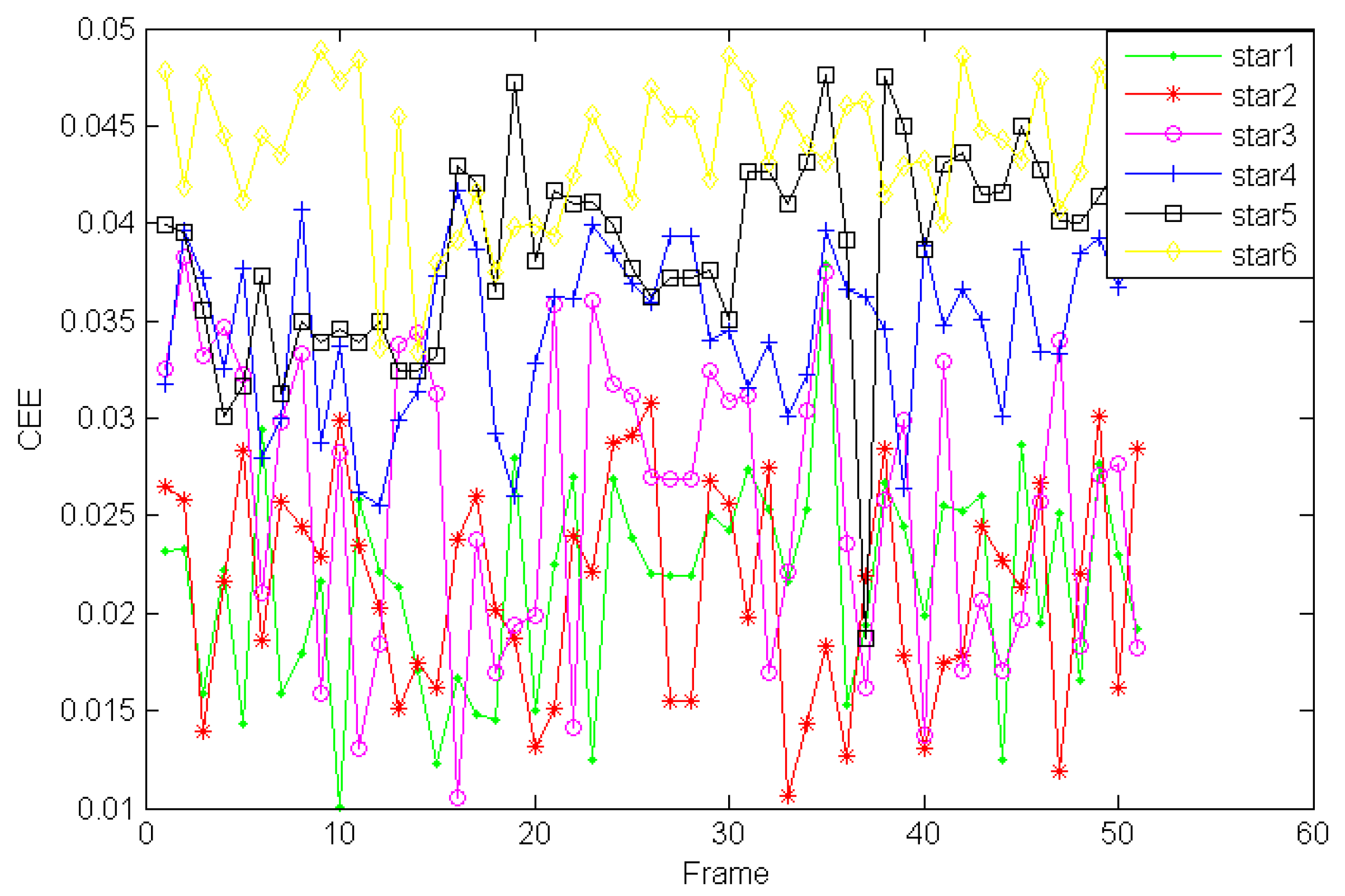
3.3. Application Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liebe, C.C. Accuracy performance of star trackers—A tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Kwang-Yul, K.; Yoan, S. A Distance Boundary with Virtual Nodes for the Weighted Centroid Localization Algorithm. Sensors 2018, 18, 1054. [Google Scholar] [CrossRef] [Green Version]
- Wan, X.W.; Wang, G.Y.; Wei, X.G.; Li, J.; Zhang, G.J. Star Centroiding Based on Fast Gaussian Fitting for Star Sensors. Sensors 2018, 18, 2836. [Google Scholar] [CrossRef] [Green Version]
- Ni, Y.M.; Dai, D.K.; Tan, W.F.; Wang, X.S.; Qin, S.Q. Attitude-correlated frames adding approach to improve signal-to-noise ratio of star image for star tracker. Opt. Express 2019, 27, 15548–15564. [Google Scholar] [CrossRef]
- Sun, T.; Xing, F.; You, Z.; Wei, M. Motion-blurred star acquisition method of the star tracker under high dynamic conditions. Opt. Express 2013, 21, 20096–20110. [Google Scholar] [CrossRef]
- Mu, Z.; Wang, J.; He, X.; Wei, Z.; He, J.; Zhang, L.; Lv, Y.; He, D.L. Restoration method of a blurred star image for a star sensor under dynamic conditions. Sensors 2019, 19, 4127. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Zhang, S.; Ning, M.; Zhou, B. Motion blurred star image restoration based on MEMS gyroscope aid and blur kernel correction. Sensors 2018, 18, 2662. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Zhao, J.; Yu, T.; Yuan, H.; Li, F. Fast restoration of star image under dynamic conditions via lp regularized intensity prior. Aerosp. Sci. Technol. 2016, 61, 29–34. [Google Scholar] [CrossRef]
- Bao, J.Y.; Xing, F.; Sun, T.; You, Z. CMOS imager non-uniformity response correction-based high-accuracy spot target localization. Appl. Opt. 2019, 58, 4560–4568. [Google Scholar] [CrossRef] [PubMed]
- Brau, J.; Igonkina, O.; Potter, C.; Sinev, N. Investigation of radiation damage in the SLD CCD vertex detector. IEEE Trans. Nucl. Sci. 2004, 51, 1742–1746. [Google Scholar] [CrossRef]
- Roger, J.C.; Santer, R.; Herman, M.; Deuzé, J.L. Polarization of the solar light scattered by the earth-atmosphere system as observed from the U.S. shuttle. Remote Sens. Environ. 1994, 48, 275–290. [Google Scholar] [CrossRef]
- Pires, B.R.; Singh, K.; Moura, J.M.F. Approximating image filters with box filters. In Proceedings of the 2011 18th IEEE International Conference on Image Processing IEEE, Brussels, Belgium, 11–14 September 2011; pp. 85–88. [Google Scholar] [CrossRef]
- Zhou, Z.; Lam, E.Y.; Lee, C. Nonlocal Means Filtering Based Speckle Removal Utilizing the Maximum a Posteriori Estimation and the Total Variation Image Prior. IEEE Access 2019, 99, 99231–99243. [Google Scholar] [CrossRef]
- Hu, H.; Zhang, B.; Xu, D.; Xia, G. Battery Surface and Edge Defect Inspection Based On Sub-Regional Gaussian and Moving Average Filter. Appl. Sci. 2019, 9, 3418. [Google Scholar] [CrossRef] [Green Version]
- Terejanu, G.; Singla, P.; Singh, T.; Scott, P.D. Adaptive Gaussian Sum Filter for Nonlinear Bayesian Estimation. IEEE Trans. Autom. Control 2011, 56, 2151–2156. [Google Scholar] [CrossRef]
- Schmidt, U. Intelligent error correction method applied on an active pixel sensor based star tracker. In Proceedings of the Detectors and Associated Signal. Processing II, Jena, Germany, 14 October 2005. [Google Scholar] [CrossRef]
- Zheng, X.; Ye, Z.; Yang, Q.; Sun, S. An error correction method for pixel inhomogeneity of star sensor based on multi-frame correlation filtering is presented. Aerosp. Control Appl. 2017, 43, 31–36. [Google Scholar]
- Yin, H.; Gong, Y.; Qiu, G. Side Window Filtering. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 8750–8758. [Google Scholar] [CrossRef]
- Zhang, K.W.; Hao, G.; Sun, S.L. Weighted Measurement Fusion Particle Filter for Nonlinear Systems with Correlated Noises. Sensors 2018, 18, 3242. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, L.; Xu, L.; Zhang, H. Improved centroid extraction algorithm for autonomous star sensor. Image Process. Let 2015, 9, 901–907. [Google Scholar] [CrossRef]
- Abderrahim, N.; Zoubir, A.; Mohammed, E.C. Improved triangular-based star pattern recognition algorithm for low-cost star trackers. J. King Saud Univ. Comput. Inf. Sci. 2021, 33, 258–267. [Google Scholar] [CrossRef]
- Hussien, F.; Ghamry, E.; Fathy, A. A Statistical Analysis of Plasma Bubbles Observed by Swarm Constellation during Different Types of Geomagnetic Storms. Universe 2021, 7, 90. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Center of Mass | |||
|---|---|---|---|
| Star 1 | (36.883, 133.291) | (36.898, 133.258) | (36.910, 133.378) |
| Star 2 | (446.025, 292.821) | (446.003, 292.860) | (446.000, 92.723) |
| Star 3 | (608.824, 43.866) | (608.798, 43.882) | (608.766, 43.829) |
| Situations | Identification Rate (%) |
|---|---|
| Original | 85.0% |
| Gaussian | 89.5% |
| SWF | 94.3% |
| IGSWF | 99.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Liu, E.; Zhao, R.; Zhang, H.; Tian, H. Star Sensor Denoising Algorithm Based on Edge Protection. Sensors 2021, 21, 5255. https://doi.org/10.3390/s21165255
Lu K, Liu E, Zhao R, Zhang H, Tian H. Star Sensor Denoising Algorithm Based on Edge Protection. Sensors. 2021; 21(16):5255. https://doi.org/10.3390/s21165255
Chicago/Turabian StyleLu, Kaili, Enhai Liu, Rujin Zhao, Hui Zhang, and Hong Tian. 2021. "Star Sensor Denoising Algorithm Based on Edge Protection" Sensors 21, no. 16: 5255. https://doi.org/10.3390/s21165255
APA StyleLu, K., Liu, E., Zhao, R., Zhang, H., & Tian, H. (2021). Star Sensor Denoising Algorithm Based on Edge Protection. Sensors, 21(16), 5255. https://doi.org/10.3390/s21165255