3.1. Gate-Duration Dependence of Effective Breakdown Voltage
The first important observation from
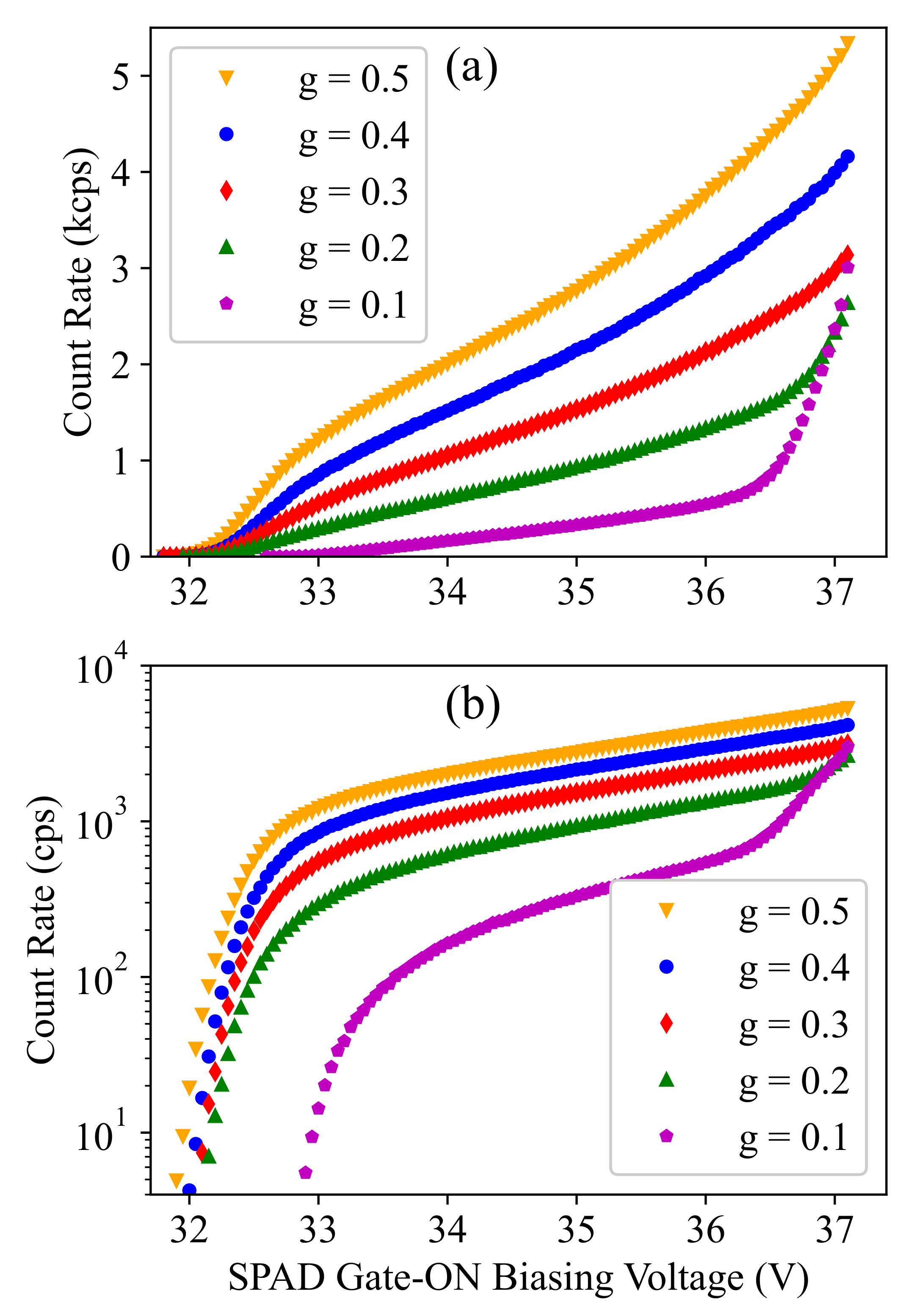
Figure 2 is the voltage shift at the required biasing level for different duty cycle values. This shift is more clear in the plots with logarithmic y-axis (with a considerable value of around 1 V for
), and it demonstrates that the smaller the gating time
is, the higher the required SPAD biasing voltage required to count avalanche events is. It is worth noticing that, when even the count rates at different duty cycles are normalize by (effective)
(i.e.,
as is shown later), to allow a fair comparison based on normalized dark-count rates at different
g values, the voltage shift remains almost the same. Therefore, this behavior cannot be explained by the “number of counts proportional to the effective
”, but it should be interpreted as an increase in the breakdown voltage for smaller duty cycles.
It is necessary to highlight that from a device physics point of view, the (theoretical) breakdown voltage, defined as the voltage where the multiplication factor of carriers approaches infinity [
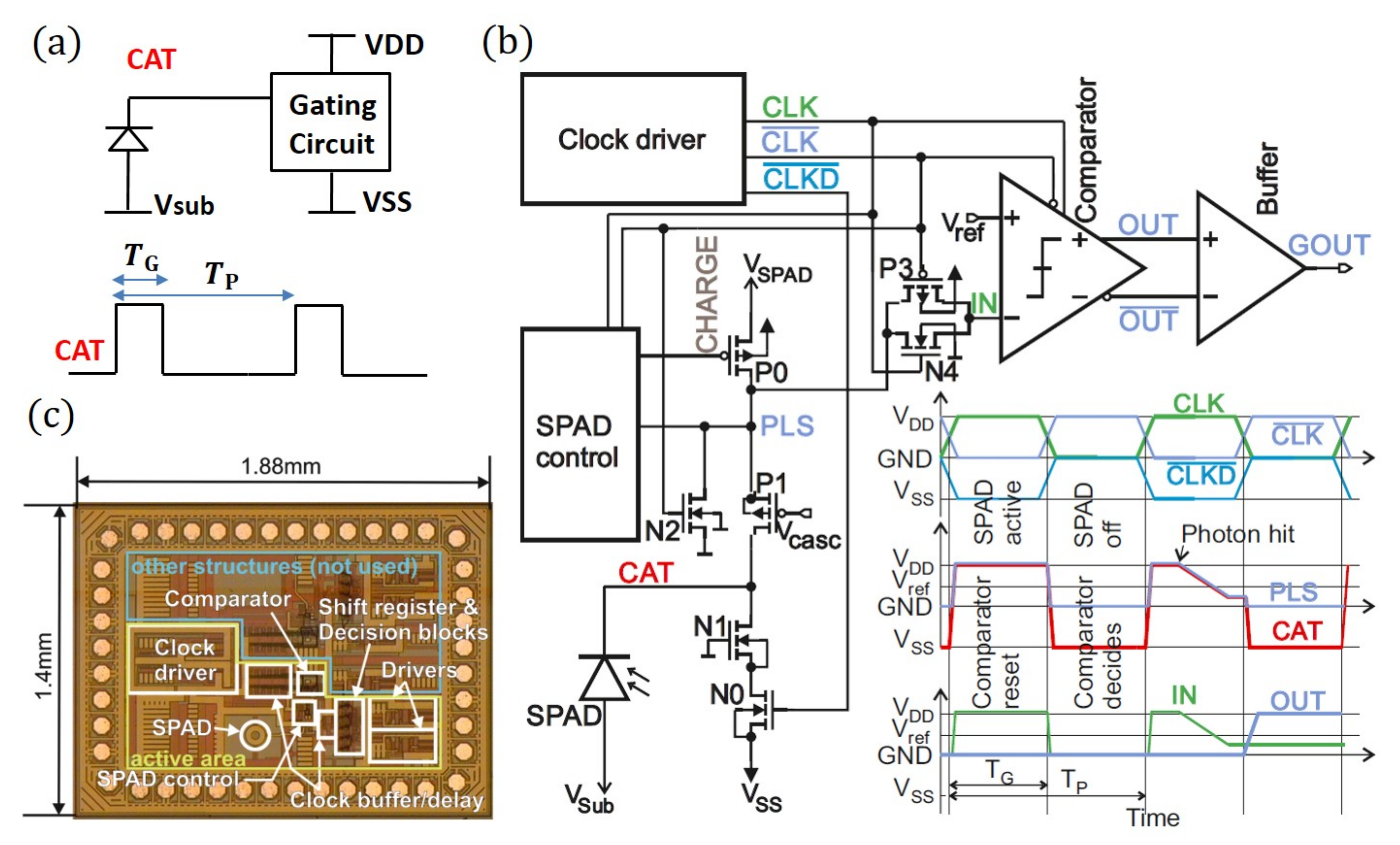
25], is a pure property of the SPAD device and cannot be affected by the characteristics (e.g., the sensitivity) of the frontend circuitry. However, from a higher level (system design) point of view for practical applications, the most important clue to measure and characterize the SPAD breakdown voltage is to identify the biasing level where the detector starts detecting. It is clear that based on this definition, the breakdown voltage cannot be independent of the features of the quenching/counting circuitry, i.e., we may measure a different breakdown for the same SPAD when a frontend circuitry of a different implementation or operation setting is used. Therefore, we need to characterize the “effective” breakdown behavior, which is affected by the properties of the frontend circuit and cannot be considered as a pure SPAD device parameter. Intuitively, unlike the free-running quench/reset operation where the avalanche charge can continue to generate a distinguishable amount of charge, in the time-gated operation, it can happen that during
, an avalanche fires, but before reaching the sensing threshold associated with the counting circuitry, the gate-ON time is over and the avalanche is suppressed before being detected.
From here on, the term “breakdown voltage” refers to an effective voltage value, which indicates a system-level performance indicator and shows a dependency on the gating duration, when the SPAD is operated in the time-gated mode. Accordingly, by calibrating the breakdown voltage, i.e., by excluding the dependence of the effective breakdown voltage from the total biasing on the SPAD, we present a unified expression of the SPAD noise (e.g., dark-count and afterpulsing) as a function of the excess bias, and only after this calibration, we can have the “number of counts proportional to the effective ” and it is possible to model the noise accordingly.
In order to provide a better understanding of the dark-noise measurement data indicated by the count rate in
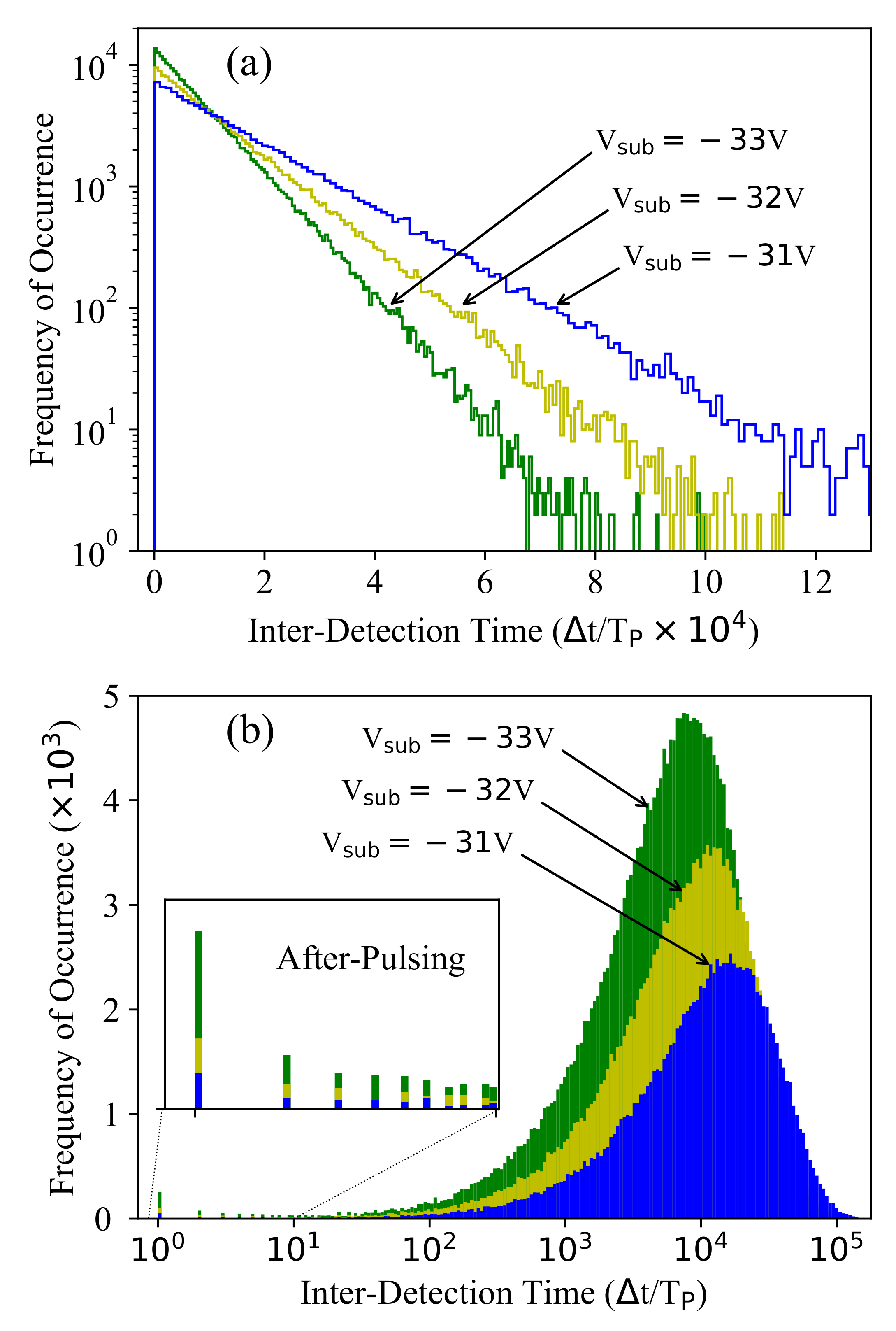
Figure 2, we investigated the distribution of the time intervals between successive counts as shown in
Figure 3 for three different biasing conditions at
. In both histograms, the time bins are normalized by the gating pulse period, and therefore, both illustrate the distribution of the number of gated pulses between each two detected counts during a measurement running for 100 s (i.e.,
pulse periods).
Figure 3a shows the common representation where the time bins have an equal width (i.e., linear x-axis). This plot captures only the distribution corresponding to the dark-count process, which is known to be exponential [
9]. As expected, a higher biasing results in a higher dark-count rate, which means a shorter average time interval between counts. Such a representation, however, ignores potentially valuable information about afterpulsing as the dark-noise measurement is dominated by the dark-counts and only a small fraction of the total counts are followed by afterpulse-counts. More importantly, afterpulsing exhibits a much shorter average time interval between counts, which cannot be characterized with time bins of a uniform width. Therefore, we preferred a second representation, shown in
Figure 3b, where the bin width increases exponentially. In fact, as the detection probability of both noise mechanisms shows an exponential behavior with time and their average time intervals differ by several orders of magnitude, the distribution associated with the two noise mechanisms can be distinguished in this representation. Here, the average time interval between the dark-counts is around
pulse periods (
ns), while the afterpulse-counts show an average interdetection time of one to two pulse periods.
Now, if we calculate the dark-count rate as
, where
is the average time interval between the dark-counts, and normalize it by
g, we expect to obtain similar count rates at each voltage biasing and independent of
g, as it should correspond to the total (i.e., maximum) dark-count rate that can be obtained when
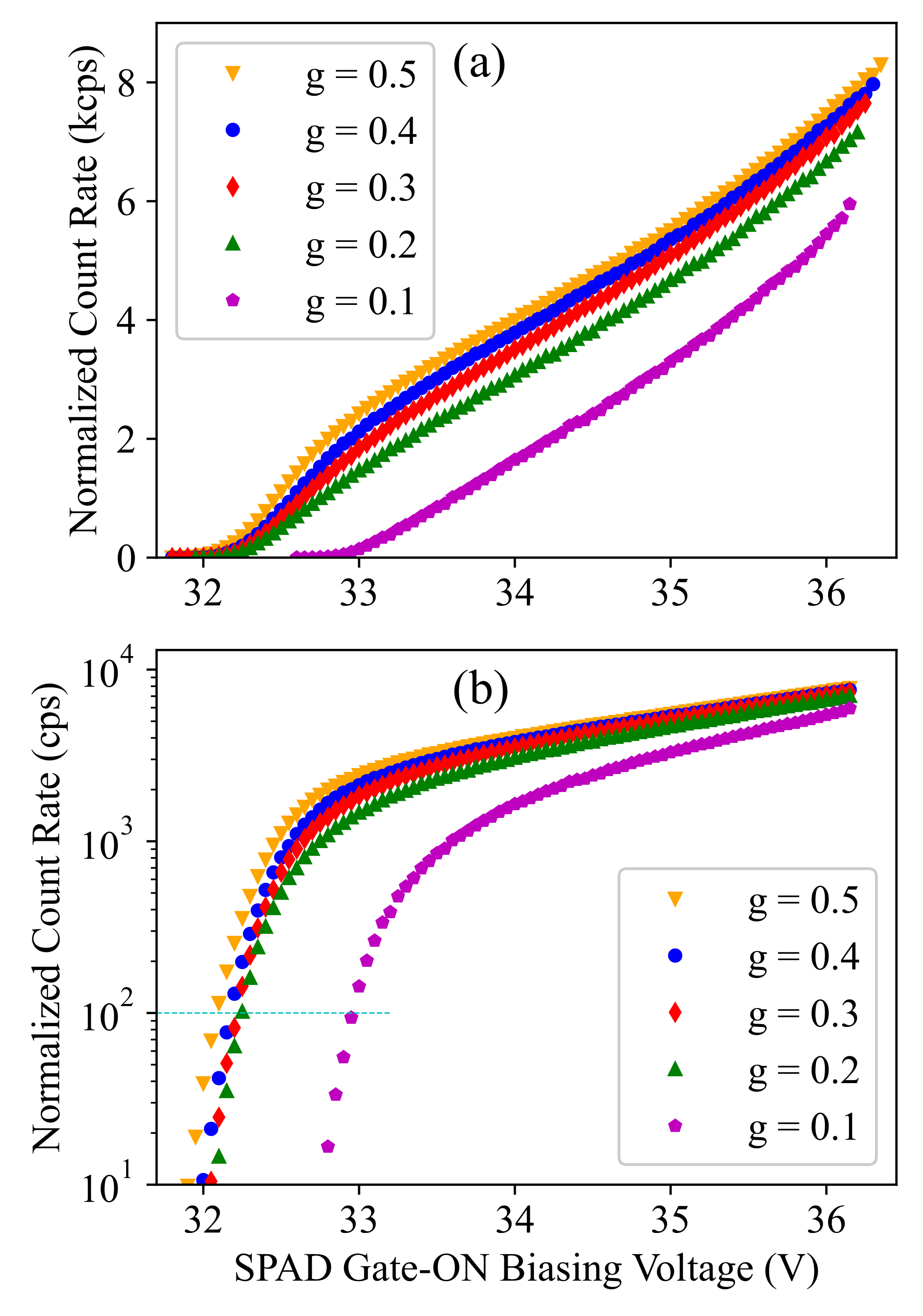
. However, the measurement results shown in
Figure 4 do not follow this expectation, especially at smaller
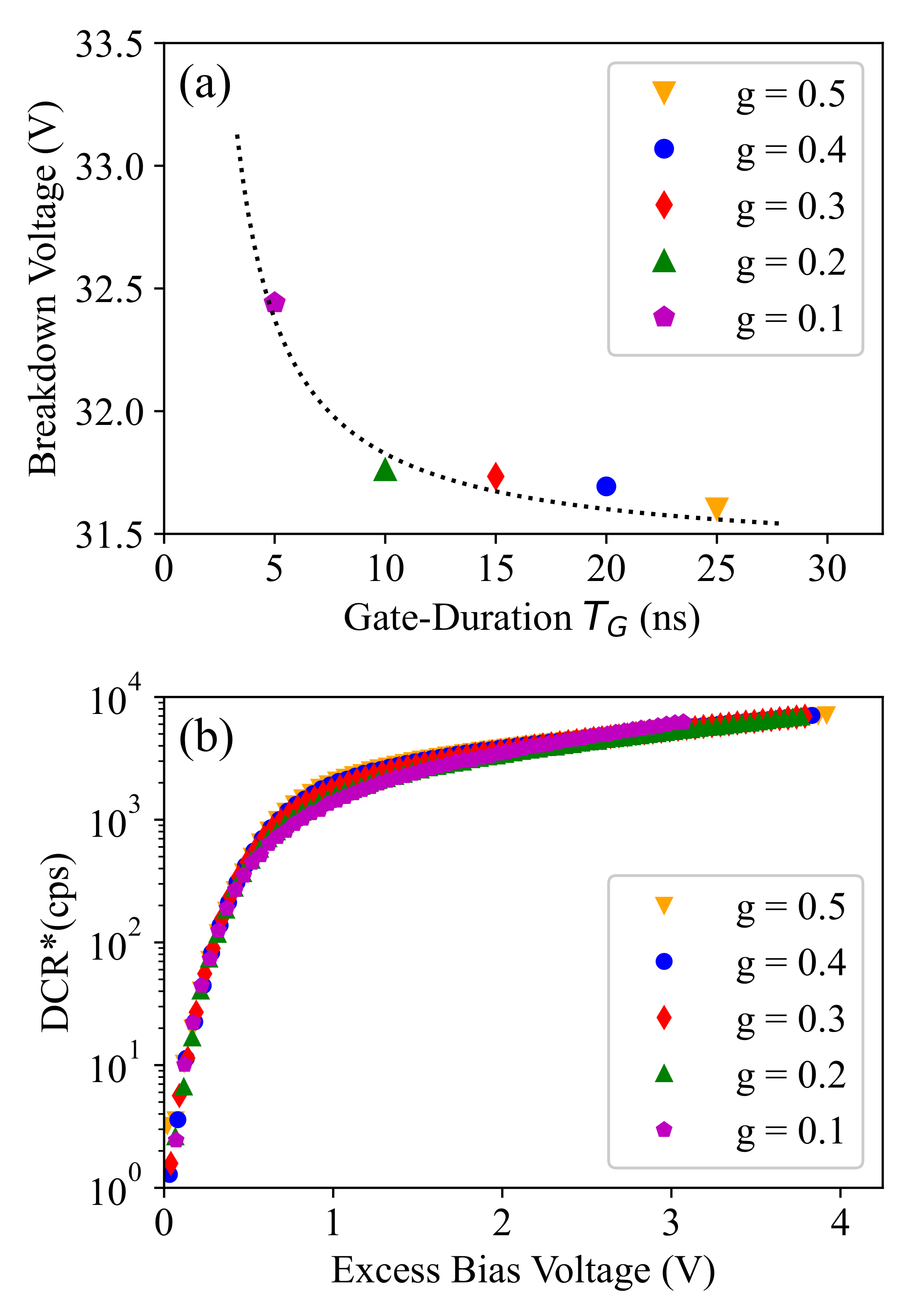
g values and at lower biasing, i.e., closer to the breakdown limit, as is highlighted in
Figure 4b. This illustrates that the breakdown voltage shows a gating-duration dependence, and at each
g value, we can calculate the breakdown shift by interpolating the biasing values corresponding to a specific count rate at a low rate value, e.g., between 10 and
, as is shown in
Figure 4b. The obtained biasing values are shown in
Figure 5a, and if we apply this breakdown calibration to the the total dark-count rate plotted as a function of the excess bias voltage, we obtain
Figure 5b. Here, we achieved similar behavior regarding the maximum dark-count rate estimated based on the measured results at different
g values.
It is important to note that when an avalanche process starts, the number of created carriers will have a near-exponential growth as each accelerated carrier can generate at least two more carriers (i.e., an electron–hole pair) via the impact–ionization mechanism. This initial exponential growth can happen in a very short time (sub-ns or ps range) depending on the SPAD size and the excess bias voltage. Then, the avalanche process can reach a (mature) self-sustaining condition, and if the device biasing is kept above a breakdown limit for a long enough time (in the ns range), the avalanche process can generate the minimum amount of charge needed to meet the sensing threshold of the counting circuitry. It is clear that, if the total avalanche duration time is shorter, as is the case for the time-gated operation with smaller
settings, a higher biasing voltage is required to generate the same amount of charge. Therefore, at any
setting, there is a minimum biasing voltage (denoted by
) below which the detector will count any detection. If we define
as the absolute minimum breakdown, i.e., there is no detection even for very long
values, a breakdown increase corresponding to a limited
can be obtained as
. We also define
as the extreme limit for the gate-duration time, i.e., if
, the gate-ON time is too short such that the avalanche can generate a detectable amount of charge even if
is set to a very high value. The effect of the limited speed of that gating signal is reflected by the parameter
, and it includes the (subnanosecond) fall/rise time of the gating pulse. To enable the detector to count the avalanche events,
must be greater than zero. It is clear that the shorter the
, the higher the
. In order to model the relationship between
and
, we used Equation (
1), as it showed a good agreement with the results obtained by the interpolation approach that was explained before. Based on this simple model, the product of
and
is a constant value giving a measure proportional to a specific amount of charge (e.g.,
) that needs to be generated during the avalanche process to meet the detection threshold of the counter circuitry. This implicitly assumes a linear relationship between the (average) current generated during the avalanche process and
, and therefore, if, for example,
is decreased by a factor of two,
has to be increased by the same factor to provide
.
Here,
,
, and
are (constant) model parameters and should be calibrated using the measurement data, and they were obtained as
V.ns,
ns, and
V by fitting the model to the measurement results shown in
Figure 5b. One should note that this model neglects the fact that an avalanche may trigger at any instant (e.g.,
) during
, and if
is closer to the falling edge of the gated pulse, the counter may not be able to detect the event even if the biasing is above the breakdown voltage corresponding to
. In fact, for the breakdown calibration, it is more reasonable to assume that the avalanche events are triggered at the beginning of
as the interpolation was based on very low dark-count rates (e.g.,
) in the DCR plot shown in
Figure 4b. At such low rates, where the biasing voltage is slightly above the breakdown, only avalanche events that are triggered at the beginning of
have the chance to be counted. In other words, the (low) dark-count rate, which is recorded at low excess bias voltages, is associated with the detections at the beginning of
, and the (thermally) generated carriers that could initiate an avalanche closer to the falling edge of the gated pulse are not counted as the excess bias is small and the avalanche process cannot generate enough charge to be detected. Consequently, the model provides a reasonable accuracy to calibrate the breakdown voltage as a function of
, and we took this
-dependent detection probability effect into account in the noise characterization and modeling, as will be explained latter. According to this model, the breakdown voltage as a function of
can be obtained by:
where
is in ns and must be larger than
ns. It should be noted that the model can capture different properties or settings of the gating circuit via the constant model parameters. To be more specific, the parameters
can capture the (nonzero) rise time of the gating signal on the SPAD, and the parameter
stands for the sensing threshold of the circuit, i.e., the comparator performance and the
voltage setting. Furthermore, the model can be extended to include the temperature dependence of the breakdown voltage by expressing
as a function of temperature. However, as this is a well-known effect, we kept the equation simple, focusing on the gating-duration dependence of the SPAD breakdown.
3.2. Dark-Count Rate
The interdetection time between dark-counts has an exponential distribution with a time constant (
), which is equal to the average interdetection time. Furthermore, due to the memoryless nature of any process with an exponential distribution, not only the waiting time between the events, but also the waiting time between any random instant and the next upcoming (dark-count) event follows the same distribution with
, as was discussed in more detail in Mahmoudi et al. [
9]. However, when the dark-count detection probability is studied over a time period (e.g.,
) that is much shorter than the dark-count time constant (
), it can be shown that the probability of having a dark-count detection within
can be obtained by
with a good approximation. In our measurements,
and
are in the milli- and nanosecond ranges, respectively, and therefore, we can assume a linear relationship between
and the corresponding dark-count probability.
Accordingly, the measured dark-count rate must show a linear relationship with the SPAD active time, i.e., the gating duty cycle
g. The raw measurement results, however, do not meet this expectation, as can be seen in
Figure 4, and only after applying the
-dependent breakdown calibration, we obtained the result shown in
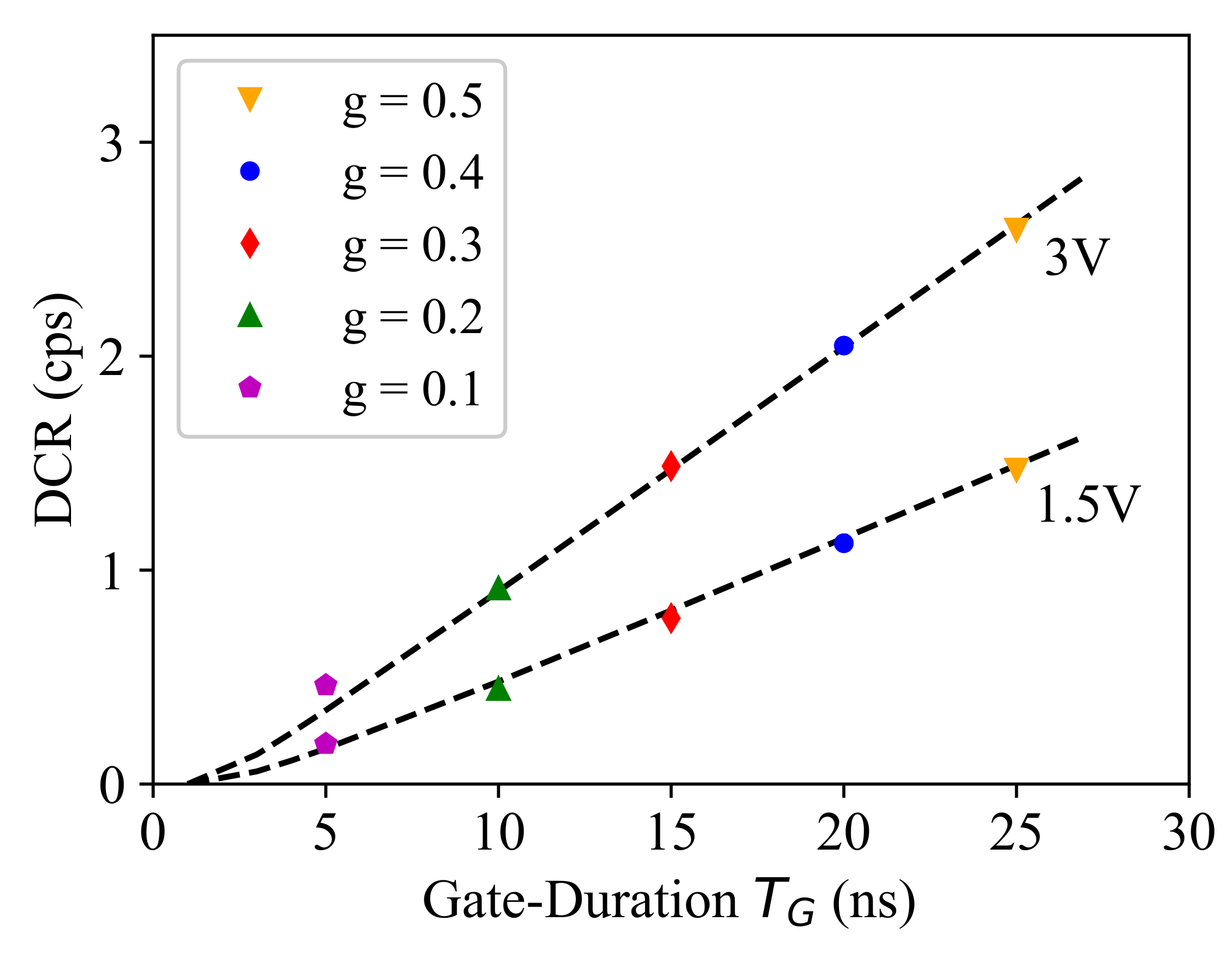
Figure 6, where the dark-count rate shows a linear growth with
at any specific excess bias voltage level. An observation here is that, the linear fit shown by the dashed line in
Figure 6 crosses the
x-axis at a nonzero
-dependent time value (denoted by
). We believe that this is a (blind) time corresponding to a fraction of the
, before its falling edge, where the gating circuit is still on, but blind to any detection. This is due to the same mechanism that was explained and modeled for breakdown calibration by Equation (
1). In fact, if we consider the distribution of the avalanche triggering instant (
) over
, there is a time interval (
) at the end of the pulse period
, where the avalanche cannot grow enough to meet the sensing threshold of the counter. It is clear that the higher the
is, the shorter the blind time
is. Interestingly,
can be estimated using the same model and the same model parameter described by Equation (
1). In fact, we can assume
as an extra breakdown shift corresponding to a shorter time interval
, and accordingly, if we replace
and
by
and
, in Equation (
1) respectively, we obtain:
where
corresponds to the blind time within the gate-duration time
when the gate excess bias is equal to
.
This correction allows us to accurately estimate the dark-count rate of the time-gated SPAD at as a function of
by:
Here,
is defined as the maximum possible dark-count rate corresponding to
(i.e.,
) at any specific
. This parameter can be calibrated according to the measurement results (at a given
g) and then applied to estimate the dark-count rate at other
g values. For example,
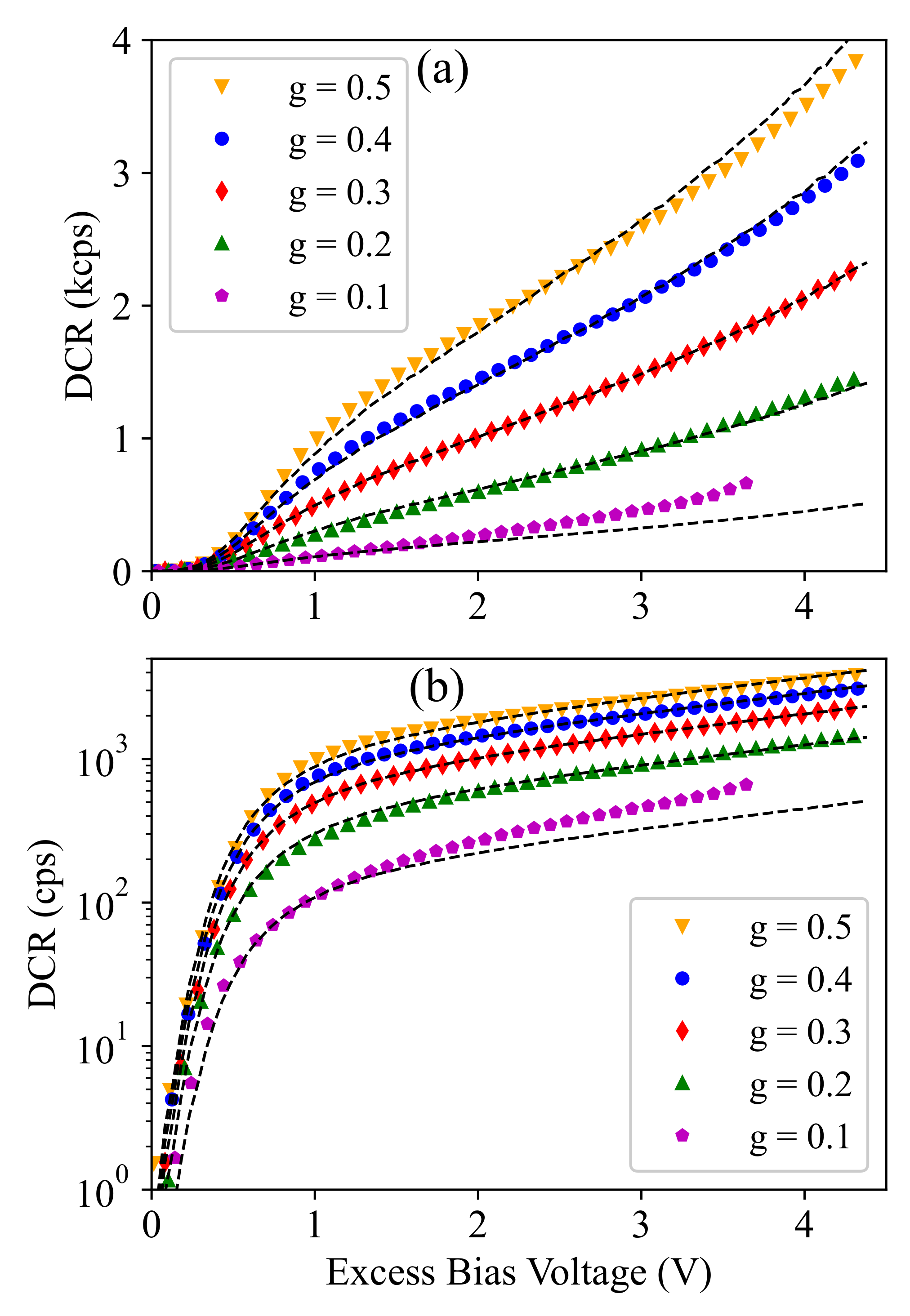
Figure 7 compares the measurement results with the estimated DCR using Equation (
4) (shown by dashed lines), where
is calibrated according to the measurement results at
. This demonstrates that the model provides an accurate description and can be used for detector performance modeling and optimization to avoid time-consuming experimental optimization. In the next section, it is explained how the afterpulsing noise mechanism of SPAD can be modeled to cover both essential SPAD noise mechanisms required for performance modeling of a time-gated SPAD.
3.3. Afterpulsing Probability
Reducing the afterpulsing noise is a key motivation to operate the SPAD in time-gated mode. In fact, on the one hand, the number of filled traps is reduced as the flow time of the avalanche current is limited to the gate-ON time, and on the other hand, the afterpulsing probability regarding the filled traps is reduced as, during the gate-OFF time, the trapped carriers can be released without causing a detection count. This significantly reduces the afterpulsing; however, there is a trade-off between noise reduction and the photon detection efficiency of the detector due to the fact that a shorter gate-ON time means less chance for photon counting (assuming an asynchronous light source). Another parameter that imposes a similar trade-off is the excess bias voltage, as a higher excess bias voltage corresponds to a higher noise and a higher photon detection efficiency. The trade-off is more complicated when we need to include system-level parameters such as the data rate or counting decision threshold if one data bit contains more than one gated pulse [
21]. Tuning several parameters to achieve an optimum detector performance may need extensive experimental or even redesign efforts. Therefore, accurate noise and performance modeling is necessary to reduce or avoid such efforts.
In order to distinguish the afterpulsing from the dark-noise measurement data, we used the concept illustrated in
Figure 3b, where the afterpulsing is associated with small interdetection times and shows the highest probability for the smallest interdetection time corresponding to one pulse period.
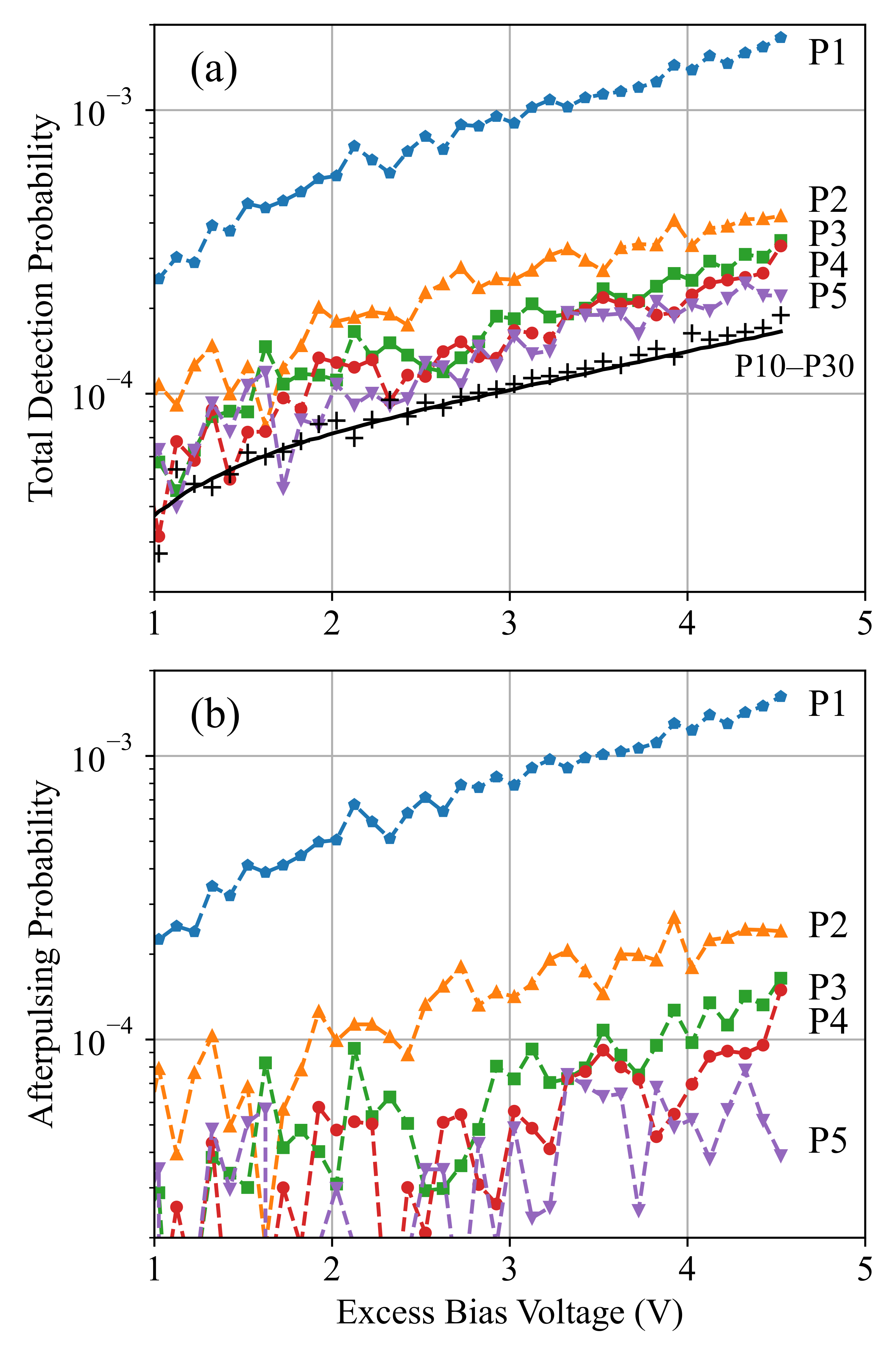
Figure 8a shows the total detection probability for the first five bins (i.e., interdetections corresponding to
, 2
,
…, 5
denoted as P1–P5), obtained by dividing the number of counts in these bins by the total counts. The obtained value includes both afterpulsing and dark-count detections, and therefore, we should exclude the dark-count probability to obtain the pure afterpulsing probability (
Figure 8b). The corresponding dark-count probability can be estimated either using the measurement data or using Equation (
4). In fact, by averaging the measured detection probabilities of some bins with a negligible afterpulsing probability (e.g., time bins with interdetections of 10
to 30
), we obtain the dark-count probability (shown by “+” for P10–P30 in
Figure 8a) that must be excluded from P1–P5. This provides a similar result to the model estimation (shown by the solid line for P10–P30 in
Figure 8a), and by applying this correction, we obtain the pure afterpulsing probabilities for P1–P5, as is shown in
Figure 8b. This figure demonstrates that the afterpulsing shows the highest probability for P1, which indicates an interdetection of one pulse period
and decreases exponentially with the interdetection time. This implicitly shows us that unlike the dark-count mechanism where we can assume a uniform detection probability distribution over
, a more accurate estimation of the afterpulsing probability distribution is required.
Although the SPAD device may have different types of trap at various energy levels having different release time behavior from the subnanosecond to above microsecond range, we are interested in the characterization of those dominating the nanosecond range, where the detector performance suffers the most. In fact, the faster traps (of the subnanosecond or a few ns range) are released during the gate-OFF time and before the next upcoming gated pulse. Furthermore, the slower traps are difficult to characterize as they mix up with dark-count detections (or background light noise in application mode), and most probably, in many applications it is not necessary to have a specific characterization or modeling for them, as they can be counted with other noise mechanisms. Therefore, in order to model the afterpulsing of the time-gated SPAD as a function of
, we assumed that the traps show a release time following an exponential distribution with a time constant of
in the range of several nanoseconds. This is a reasonable assumption [
9] and showed a very good agreement with the measurement data, as we will see in the following.
According to this assumption, if an avalanche is triggered at time
, the afterpulsing probability within the time interval (
) after
(
) is obtained by:
where
is the total afterpulsing probability corresponding to (
and
). It is clear that the SPAD was assumed to be active and ready to count between
and
with a biasing condition above the breakdown.
In the time-gated operation mode, we can assume that if an avalanche is triggered within
, the current flow through the SPAD (filling the traps) will continue over the whole gate-ON time, and therefore, the time that elapses between a detection and the next gate-ON pulse is equal to one gate-OFF period (i.e.,
). The trapped carriers that are released during this period cannot trigger an afterpulse event. Then, when the SPAD is active again, there is a time period of
during which an afterpulse avalanche can happen. This assumption provides a good approximation, especially at higher pulse rates, but as a secondary effect, one may take the transient behavior of the avalanche [
22] into account to estimate the average (detection-free) time between an avalanche detection and the next gate-ON pulse more accurately.
Here, in order to obtain the afterpulsing probability corresponding to the
n-th pulse after the avalanche detection (denoted by
), we replaced
and
by
and
in Equation (
5), respectively. As a result, the total afterpulsing probability of the time-gated SPAD can be obtained as:
The model parameters
and
were calibrated based on limited dark-noise measurement data, and then, the model can be used to estimate the afterpulsing probability at different
g and
values for any simulation purpose. In order to calculate
, if we divide the measured APPs for interdetection times of one and two
(shown by
and
in
Figure 8b), we have:
As a result,
can be obtained as:
For our time-gated SPAD device in 0.35-
m CMOS technology,
was obtained as around 26 ns, and this value provided an agreement between the model estimation and the measurement results regarding the afterpulsing probabilities at different gate-ON time values. One should note that if the dark-count probability is not excluded from the measurement result (as is shown in
Figure 8a,b),
cannot be captured accurately due to an overestimation in Equation (
8) as both
and
will increase by a fixed amount equal to the dark-count probability within one pulse period. The other model parameter
is defined as the afterpulsing probability when
. That means that
corresponds to the maximum possible afterpulsing probability at
, i.e., when the gate-OFF time and the blind time are negligible as compared to
. After
is calculated and
are obtained based on the measurement results at a specific
, the parameter
can be calculated using Equation (
6), and the model can be used to predict the afterpulsing probability at any other operation condition.
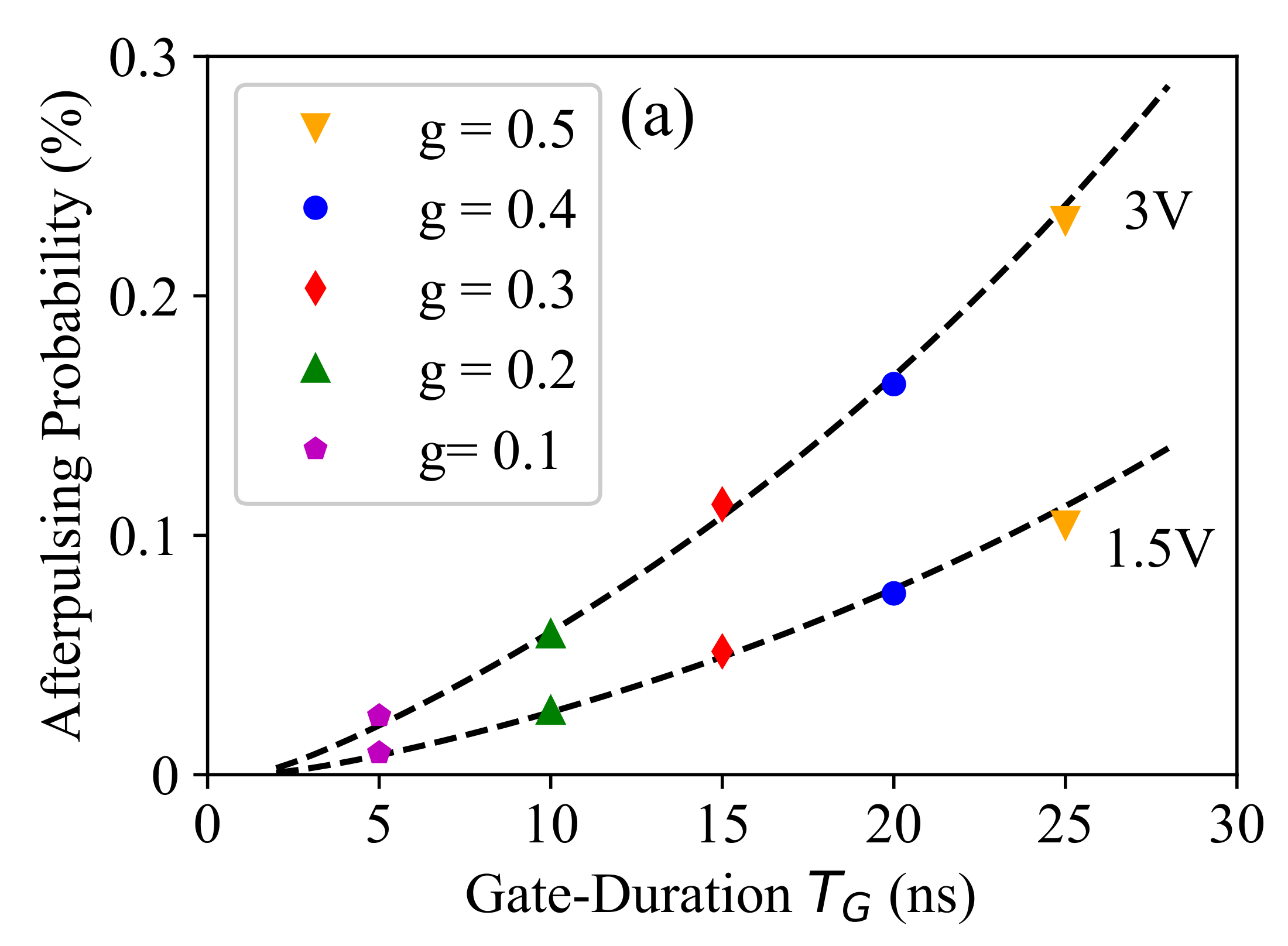
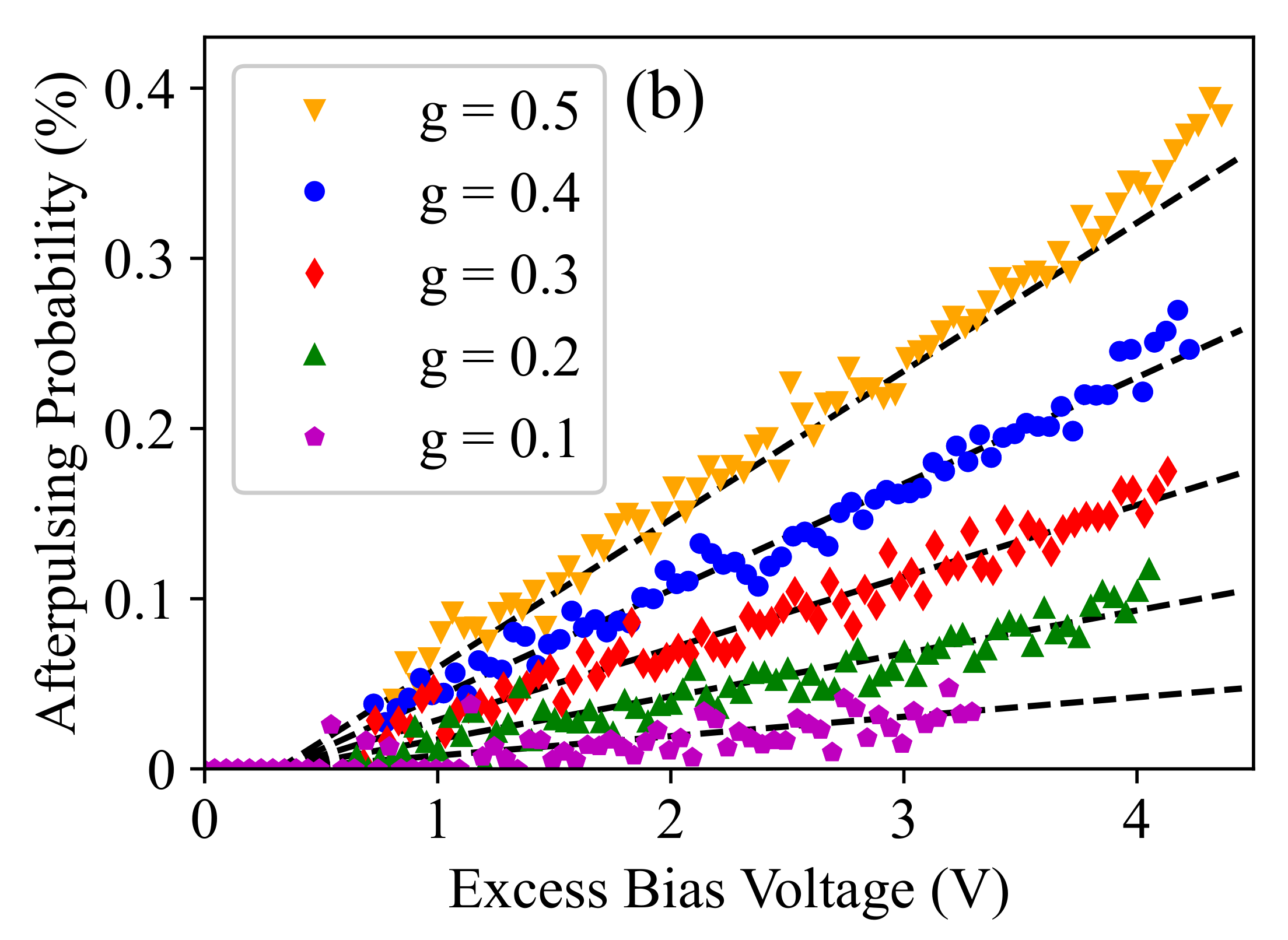
Figure 9a compares the measured afterpulsing probability (APP) and the corresponding estimated value using Equation (
6) (shown by dashed lines) at different
values. It demonstrates that the proposed afterpulsing probability model can accurately predict the exponential behavior of the afterpulsing probability as a function of
, which cannot be captured with a linear model used for dark-count characterization. Furthermore,
Figure 9b shows the measurement and the model prediction (shown by dashed lines) results for the afterpulsing probability as a function of
at different gated duty cycles. Here, the parameter
was calibrated at any
value according to the measured value at
and was used to predict the afterpulsing probability at other
g values, and we saw a good agreement between the experimental data and the model prediction. It is interesting to note that here, the measurement data were more noisy as compared to that of the dark-count rate shown in
Figure 7. The reason for the significant noise in the afterpulsing measurement data was the limited number of recorded events as compared to the dark-count events. In fact, as we characterized both noise mechanisms using the dark-noise measurement, the number of dark-count events was, by a factor of around
, larger than that of afterpulsing, which was about three orders of magnitude. It is clear that increasing the measurement time can decrease the measurement noise, but 100 s of measurement time at each operation condition provided a reasonable accuracy in our setup.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














