
Design and Fabrication of a New Wearable Pressure Sensor for Blood Pressure Monitoring

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Sensing Principle
3. Materials and Methods
3.1. Simulation
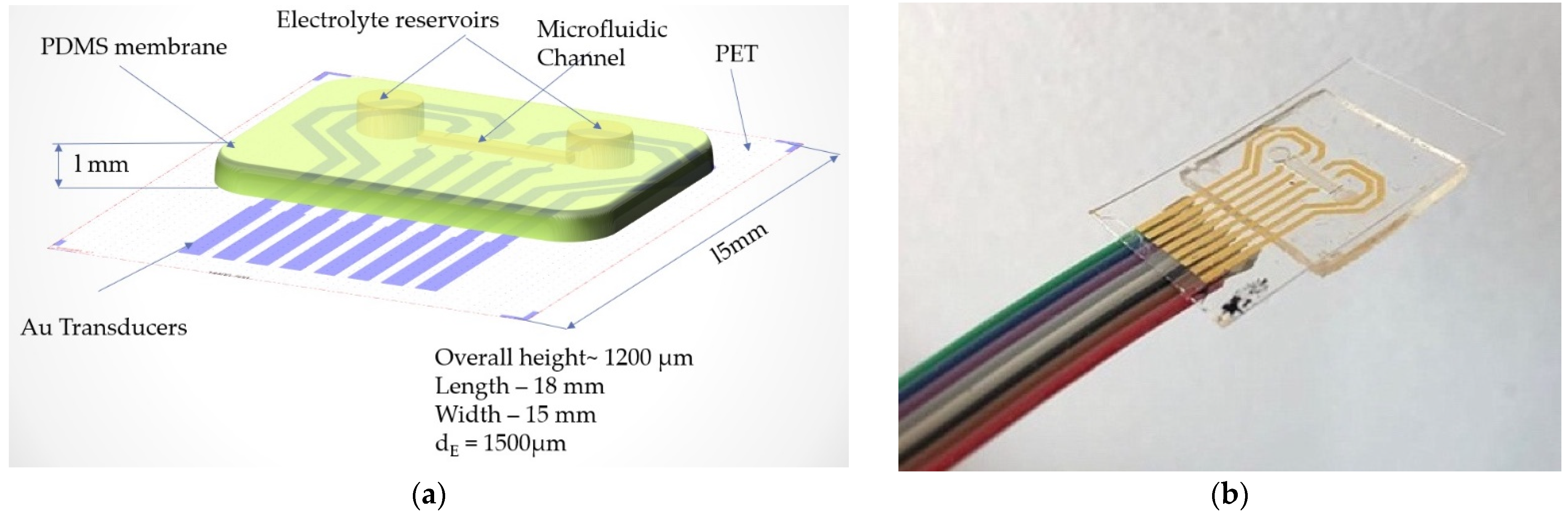
- Width of metal electrodes: 500–1000 μm;
- The distance between the terminals ends: 500 μm;
- Electrolyte with conductivity in the range of mS/cm; and
- Low-height microfluidic channel: 500 µm.
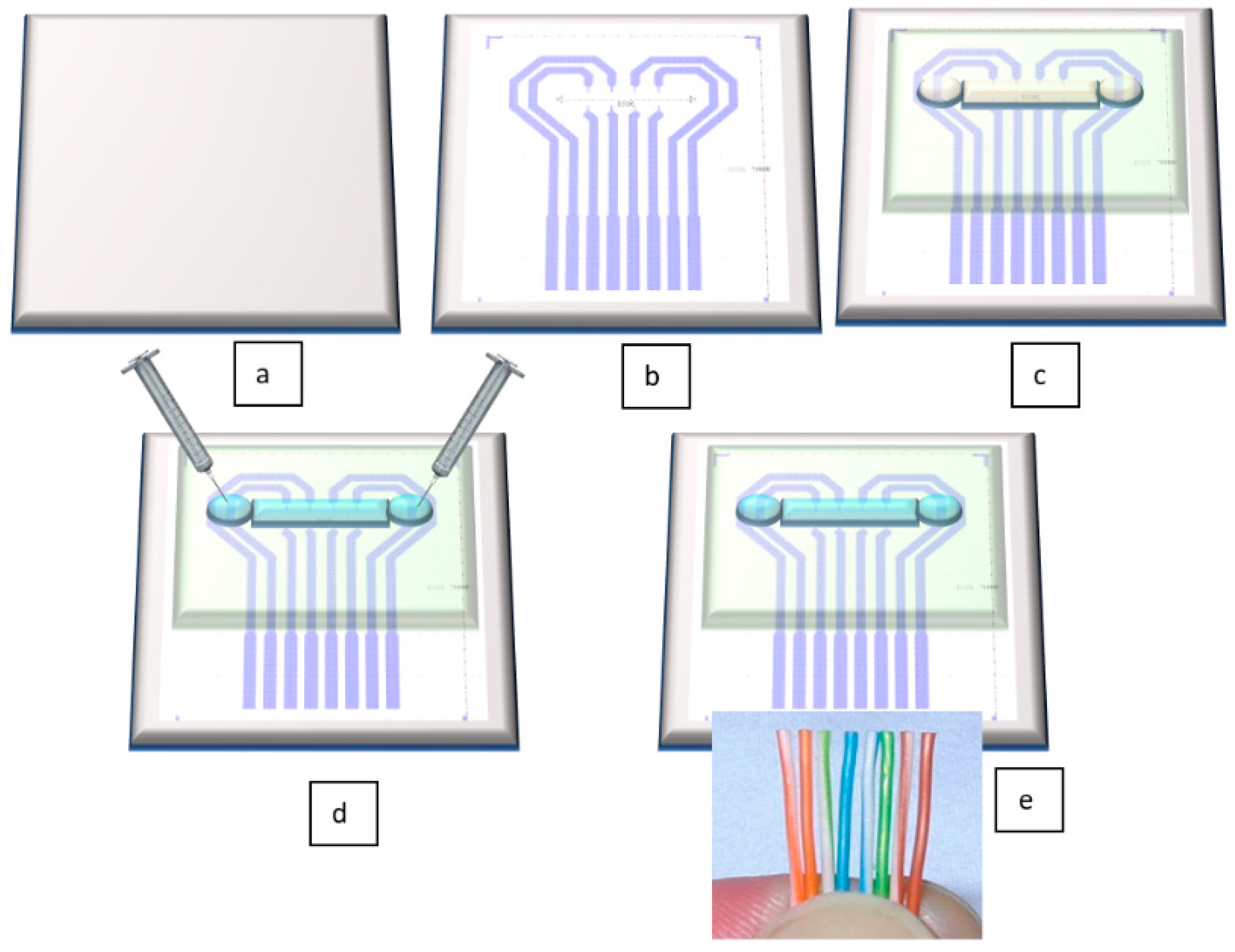
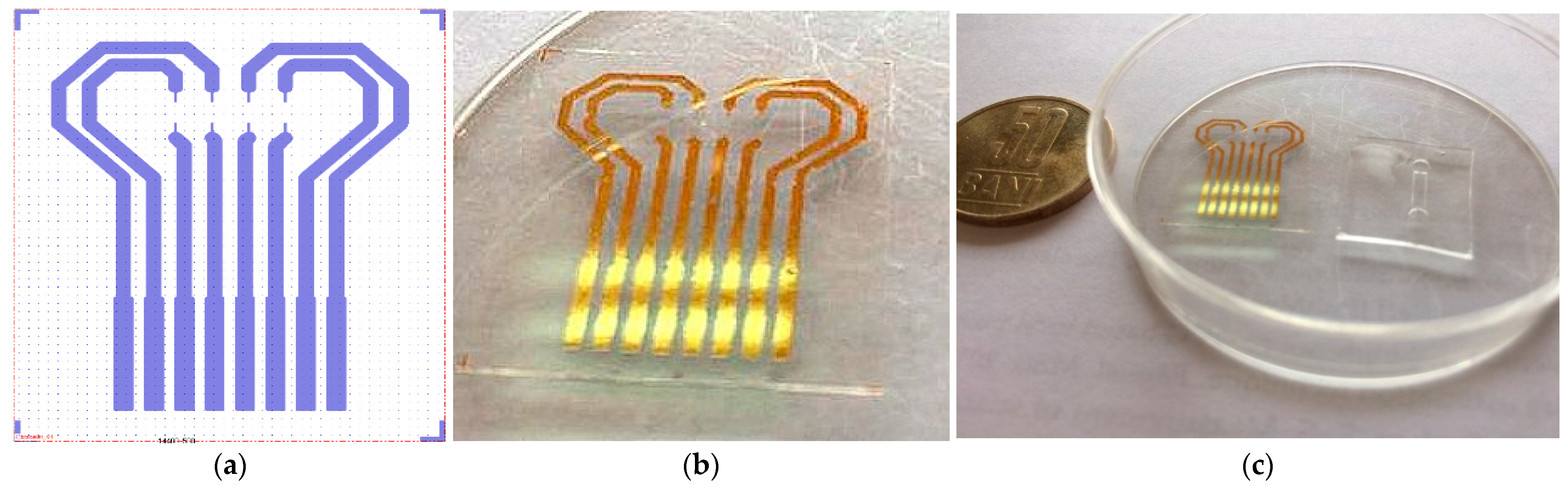
3.2. Fabrication Technology
3.2.1. Substrate Preparation and Au Deposition
3.2.2. Microfluidic Channel Formation and PDMS Membrane Fabrication
3.2.3. Bonding the Two Polymeric Layers and Filling the Microchannel
3.2.4. Preparation Instructions for S1
- 4% PSS + 0.006% SWCNT + 0.266 ANI and 1% EG were placed in an Erlenmeyer flask and 17.67 mL H2O was added.
- The solution was heated to 60 °C and alternatively added to the ultrasonic bath until the complete dissolution of the carbon particles. This can take up to 24 h.
- The conductivity of the solution was 4 mS/cm at room temperature.
4. Results: Electrical Characterization for the Fabricated Flexible Pressure Sensor
4.1. Direct Current Measurements (DC)
4.1.1. DC-1. Flexible Pressure Sensor (FPS) Placed on the Artificial Arm 2 (IMT-Arm) with Pressure Applied from an OB1 Pulse Generator from Elveflow
4.1.2. DC-2. (FPS) Placed on the Hand (Wrist Area)
4.1.3. DC-3 Direct Current Radial Artery Sensor (SAR)
4.2. Alternating Current Measurements (AC)
4.2.1. AC-1 (FPS) Placed on MultiTest-i (MecMesin)
4.2.2. AC-2 (FPS) Placed on the Artificial Arm 2, Using the LRC Bridge and the OB1 Pulse Generator
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Babbs, C.F. The origin of Korotkoff sounds and the accuracy of auscultatory blood pressure measurements. J. Am. Soc. Hypertens. 2015, 9, 935–995. [Google Scholar] [CrossRef] [Green Version]
- Pan, F.; Chen, F.; Liu, C.; Yang, Z.; Liu, Z.; Zheng, D. Quantitative Comparison of Korotkoff Sound Waveform Characteristics: Effects of Static Cuff Pressures and Stethoscope Positions. Ann. Biomed. Eng. 2018, 46, 1736–1744. [Google Scholar] [CrossRef] [Green Version]
- Trigg, S.A.; Abreu, D.; Bitton-Foronda, B.; Foley, F.C.; Gibson, A.L. Comparison of Systolic Blood Pressure Measurements by Auscultation and Visual Manometer Needle Jump. Int. J. Exerc. Sci. 2019, 12, 214–220. [Google Scholar] [PubMed]
- Ramsey, M. Automatic oscillometric noninvasive blood pressure: Theory and practice. In Blood Pressure Measurements; Meyer-Sabellek, W., Gotzen, R., Anlauf, M., Steinfeld, L., Eds.; Steinkopff: Heidelberg, Germany, 1990. [Google Scholar] [CrossRef]
- Pickering, T.G.; Hall, J.E.; Appel, L.J.; Falkner, B.E.; Graves, J.; Hill, M.N.; Jones, D.W.; Kurtz, T.; Sheps, S.G.; Roccella, E.J. Recommendations for blood pressure measurement in humans and experimental animals: Part 1: Blood pressure measurement in humans: A statement for professionals from the Subcommittee of Professional and Public Education of the American Heart Association Council on High Blood Pressure Research. Hypertension 2005, 45, 142–161. [Google Scholar] [CrossRef] [PubMed]
- Pickering, T. The case for a hybrid sphygmomanometer. Blood Press. Monit. 2001, 6, 177–179. [Google Scholar] [CrossRef] [PubMed]
- Borow, K.M.; Newburger, J.W. Noninvasive estimation of central aortic pressure using the oscillometric method for analyzing systemic artery pulsatile blood flow: Comparative study of indirect systolic, diastolic, and mean brachial artery pressure with simultaneous direct ascending aortic pressure measurements. Am. Heart J. 1982, 103, 879–886. [Google Scholar] [CrossRef]
- Santucci, S.; Cates, E.M.; James, G.D.; Schussel, Y.R.; Steiner, D.; Pickering, T.G. A comparison of two ambulatory blood pressure monitors, the Del Mar Avionics Pressurometer IV and the Spacelabs 90202. Am. J. Hypertens. 1989, 2, 797–799. [Google Scholar] [CrossRef] [PubMed]
- Benmira, A.; Perez-Martin, A.; Schuster, I.; Aichoun, I.; Coudray, S.; Bereksi-Reguig, F.; Dauzat, M. From Korotkoff and Marey to automatic non-invasive oscillometric blood pressure measurement: Does easiness come with reliability? Exp. Rev. Med. Dev. 2016, 13, 179–189. [Google Scholar] [CrossRef]
- Imai, Y.; Abe, K.; Sasaki, S.; Minami, N.; Munakata, M.; Sakuma, H.; Hashimoto, J.; Sekino, H.; Imai, K.; Yoshinaga, K. Clinical evaluation of semiautomatic and automatic devices for home blood pressure measurement: Comparison between cuff-oscillometric and microphone methods. J. Hypertens. 1989, 7, 983–990. [Google Scholar] [CrossRef]
- King, G.E. Influence of rate of cuff inflation and deflation on observed blood pressure by sphygmomanometry. Am. Heart J. 1963, 65, 303–306. [Google Scholar] [CrossRef]
- Elseed, A.M.; Shinebourne, E.A.; Joseph, M.C. Assessment of techniques for measurement of blood pressure in infants and children. Arch. Dis. Child. 1973, 48, 932–936. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ogedegbe, G.; Pickering, T. Principles and techniques of blooc pressure measurement. Cardiol. Clin. 2010, 28, 571–586. [Google Scholar] [CrossRef] [Green Version]
- Penaz, J. Photo-electric measurement of blood pressure, volume and flow in the finger. Dresden: Digest of Tenth International Conference on Medical Biological Engineering. Dresden 1973, 104, 5–10. [Google Scholar]
- Masè, M.; Mattei, W.; Cucino, R.; Faes, L.; Nollo, G. Feasibility of cuff-free measurement of systolic and diastolic arterial blood pressure. J. Electrocardiol. 2011, 44, 201–207. [Google Scholar] [CrossRef] [PubMed]
- Elgendi, M.; Fletcher, R.; Liang, Y.; Howard, N.; Lovell, N.H.; Abbott, D.; Ward, R. The use of photoplethysmography for assessing hypertension. NPJ Digit. Med. 2019, 2, 60. [Google Scholar] [CrossRef] [Green Version]
- Kario, K.; Shimbo, D.; Tomitani, N.; Kanegae, H.; Schwartz, J.E.; Williams, B. The first study comparing a wearable watch-type blood pressure monitor with a conventional ambulatory blood pressure monitor on in-office and out-of-office settings. J. Clin. Hypertens. 2020, 22, 135–141. [Google Scholar] [CrossRef] [Green Version]
- Castaneda, D.; Esparza, A.; Ghamari, M.; Soltanpur, C.; Nazeran, H. A review on wearable photoplethysmography sensors and their potential future applications in health care. Int. J. Biosens. Bioelectron. 2018, 4, 195. [Google Scholar]
- Lee, S.; Chang, J.-H. Oscillometric blood pressure estimation based on deep learning. IEEE Trans. Ind. Inform. 2016, 13, 461–472. [Google Scholar] [CrossRef]
- Association, I.S. IEEE Standard for Wearable Cuffless Blood Pressure Measuring Devices. IEEE Std., 1708–2014. Available online: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=6882122 (accessed on 9 March 2020).
- Porter, K.B.; O’Brien, W.F.; Kiefert, V.; Knuppel, R.A. Flnapres: A Noninvasive Device to Monitor Blood Pressure. Obstet. Gynecol. 1991, 78, 430–433. [Google Scholar] [PubMed]
- Kermode, J.; Davis, N.; Thompson, W. Comparison of the Finapres blood pressure monitor with intra-arterial manometry during induction of anaesthesia. Anaesth. Intensive Care 1989, 17, 470–475. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://polymerdatabase.com/Films/PET%20Films.html (accessed on 23 October 2020).
- Nag, A.; Mukhopadhyay, S.C.; Kosel, J. Wearable Flexible Sensors: A Review. IEEE Sens. J. 2017, 17, 3949–3960. [Google Scholar] [CrossRef] [Green Version]
- Fuard, D.; Tzvetkova-Chevolleau, T.; Decossas, S.; Tracqui, P.; Schiavone, P. Optimization of poly-di-methyl-siloxane (PDMS) substrates for studying cellular adhesion and motility. Microelectron. Eng. 2008, 85, 1289–1293. [Google Scholar] [CrossRef] [Green Version]
- Rim, Y.S.; Bae, S.H.; Chen, H.; De Marco, N.; Yang, Y. Recent progress in materials and devices toward printable and flexible sensors. Adv. Mater. 2016, 28, 4415–4440. [Google Scholar] [CrossRef]
- McManus, D.; Vranic, S.; Withers, F.; Sanchez-Romaguera, V.; Macucci, M.; Yang, H.; Casiraghi, C. Water-based and biocompatible 2D crystal inks for all-inkjet-printed heterostructures. Nat. Nanotechnol. 2017, 12, 343–350. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://www.mdpi.com/1424-8220/20/8/2273 (accessed on 4 January 2021).
- Wilkinson, M.B.; Outram, M. Principles of pressure transducers, resonance, damping and frequency response. Anaesth. Intensive Care Med. 2009, 10, 102–105. [Google Scholar] [CrossRef]
- Li, R.; Nie, B.; Digiglio, P.; Pan, T. Microflotronics: A Flexible, Transparent, Pressure-Sensitive Microfluidic Film. Adv. Funct. Mater. 2014, 24, 6195–6203. [Google Scholar] [CrossRef]
- Drzewiecki, G.M.; Melbin, J.; Noordergraaf, A. Arterial tonometry: Review and analysis. J. Biomech. 1983, 16, 141–152. [Google Scholar] [CrossRef]
- Gu, W.; Cheng, P.; Ghosh, A.; Liao, Y.; Liao, B.; Beskok, A.; Hao, Z. Detection of distributed static and dynamic loads with electrolyte-enabled distributed transducers in a polymer-based microfluidic device. J. Micromech. Microeng. 2013, 23, 035015. [Google Scholar] [CrossRef]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Matteo, A.; Gina, G.; Marco, C. Polydimethylsiloxane (PDMS) irreversible bonding to untreated plastics and metals for microfluidics applications. APL Mater. 2019, 7, 081108. [Google Scholar] [CrossRef] [Green Version]
- Grøtli, M.; Gotfredsen, C.H.; Rademann, J.; Buchardt, J.; Clark, A.J.; Duus, J.O.; Meldal, M. Physical properties of poly(ethylene glycol) (PEG)-based resins for combinatorial solid phase organic chemistry: A comparison of PEG-cross-linked and PEG-grafted resins. J. Comb. Chem. 2000, 2, 108–119. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel’s Deformation (μm) | Initial Version | Electrodes Width 1000 μm | Electrolyte Conductivity 4 mS/cm | Channel Height 500 μm | ||||
|---|---|---|---|---|---|---|---|---|
| Resistance (MOhm) | Sensitivity % | Resistance (MOhm) | Sensitivity % | Resistance (MOhm) | Sensitivity % | Resistance (MOhm) | Sensitivity % | |
| 0 | 2.9974 | 0.00% | 0.89872 | 0.00% | 0.37882 | 0.00% | 3.1208 | 0.00% |
| 50 | 2.9884 | 0.30% | 0.89112 | 0.85% | 0.37879 | 0.01% | 3.1147 | 0.20% |
| 100 | 2.9846 | 0.43% | 0.90161 | 0.32% | 0.37943 | 0.16% | 3.1506 | 0.95% |
| 150 | 3.0203 | 0.76% | 0.89860 | 0.01% | 0.3805 | 0.44% | 3.2190 | 3.15% |
| 200 | 3.0218 | 0.81% | 0.91082 | 1.35% | 0.38268 | 1.02% | 3.3296 | 6.69% |
| 250 | 3.0564 | 1.97% | 0.93813 | 4.39% | 0.38565 | 1.80% | 3.4995 | 12.13% |
| 300 | 3.0827 | 2.85% | 0.94641 | 5.31% | 0.38948 | 2.81% | 3.7388 | 19.80% |
| 350 | 3.1087 | 3.71% | 0.97489 | 8.48% | 0.39442 | 4.12% | 4.1462 | 32.86% |
| 400 | 3.1641 | 5.56% | 1.01270 | 12.68% | 0.40112 | 5.89% | 4.8582 | 55.67% |
| 500 | 3.3248 | 10.92% | 1.12060 | 24.69% | 0.42426 | 12.00% | N/A | N/A |
| Solution 1 (S1) | Poly (Styrenesulfonate) (%) | SWCNT (Single Walled Carbon Nanotube) (%) | Aniline (%) | Ethylene Glycol EG(%) | Total H2O mL |
|---|---|---|---|---|---|
| Concentration (%) | 4 | 0006 | 0.26 | 1 | 25 mL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ion, M.; Dinulescu, S.; Firtat, B.; Savin, M.; Ionescu, O.N.; Moldovan, C. Design and Fabrication of a New Wearable Pressure Sensor for Blood Pressure Monitoring. Sensors 2021, 21, 2075. https://doi.org/10.3390/s21062075
Ion M, Dinulescu S, Firtat B, Savin M, Ionescu ON, Moldovan C. Design and Fabrication of a New Wearable Pressure Sensor for Blood Pressure Monitoring. Sensors. 2021; 21(6):2075. https://doi.org/10.3390/s21062075
Chicago/Turabian StyleIon, Marian, Silviu Dinulescu, Bogdan Firtat, Mihaela Savin, Octavian N. Ionescu, and Carmen Moldovan. 2021. "Design and Fabrication of a New Wearable Pressure Sensor for Blood Pressure Monitoring" Sensors 21, no. 6: 2075. https://doi.org/10.3390/s21062075
APA StyleIon, M., Dinulescu, S., Firtat, B., Savin, M., Ionescu, O. N., & Moldovan, C. (2021). Design and Fabrication of a New Wearable Pressure Sensor for Blood Pressure Monitoring. Sensors, 21(6), 2075. https://doi.org/10.3390/s21062075