
Motorway Measurement Campaign to Support R&D Activities in the Field of Automated Driving Technologies

 ,
,  , ,
, ,  , , ,
, , ,  , , , ,
, , , ,  , ,
, , 
 , , add
Show full author list
, , add
Show full author list
Abstract
:1. Introduction
- Budapest University of Technology and Economics
- Graz University of Technology
- ALP.Lab GmbH
- Automotive Proving Ground Zala Ltd.
- Hungarian Public Roads
- JOANNEUM RESEARCH Forschungsgesellschaft mbH.
- Knorr-Bremse Hungary
- AVL Hungary
- Budapest Road Authority
- Virtual Vehicle Research GmbH
- Linz Center of Mechatronics GmbH
2. Measurement Campaign Realization
2.1. Location of the Measurement Campaign
- Section 1. Interchange area (red): the two carriageways have different horizontal and vertical alignment, while leaving the M85-M86 interchange. In this section, two 3.50 m wide lanes are available for the through traffic, and there are additional accelerating/decelerating lanes linked to junction ramps.
- Section 2. Open highway (blue): a common approx. 300-m-long dual carriageway section with two 3.50 m wide traffic lanes, and 3.00 m wide hard shoulder on both sides.
- Section 3. Transition section (yellow): heading towards north, the central preserve ends, and only one 3.50 m wide lane left for each direction, while northbound lane is diverted to the eastbound carriageway.
- Section 4. Main road (purple): the last section is a single carriageway road with 2 × 1 lanes, connecting the highway section to main road number 86.
2.2. High Precision Mapping during the Measurement Campaign
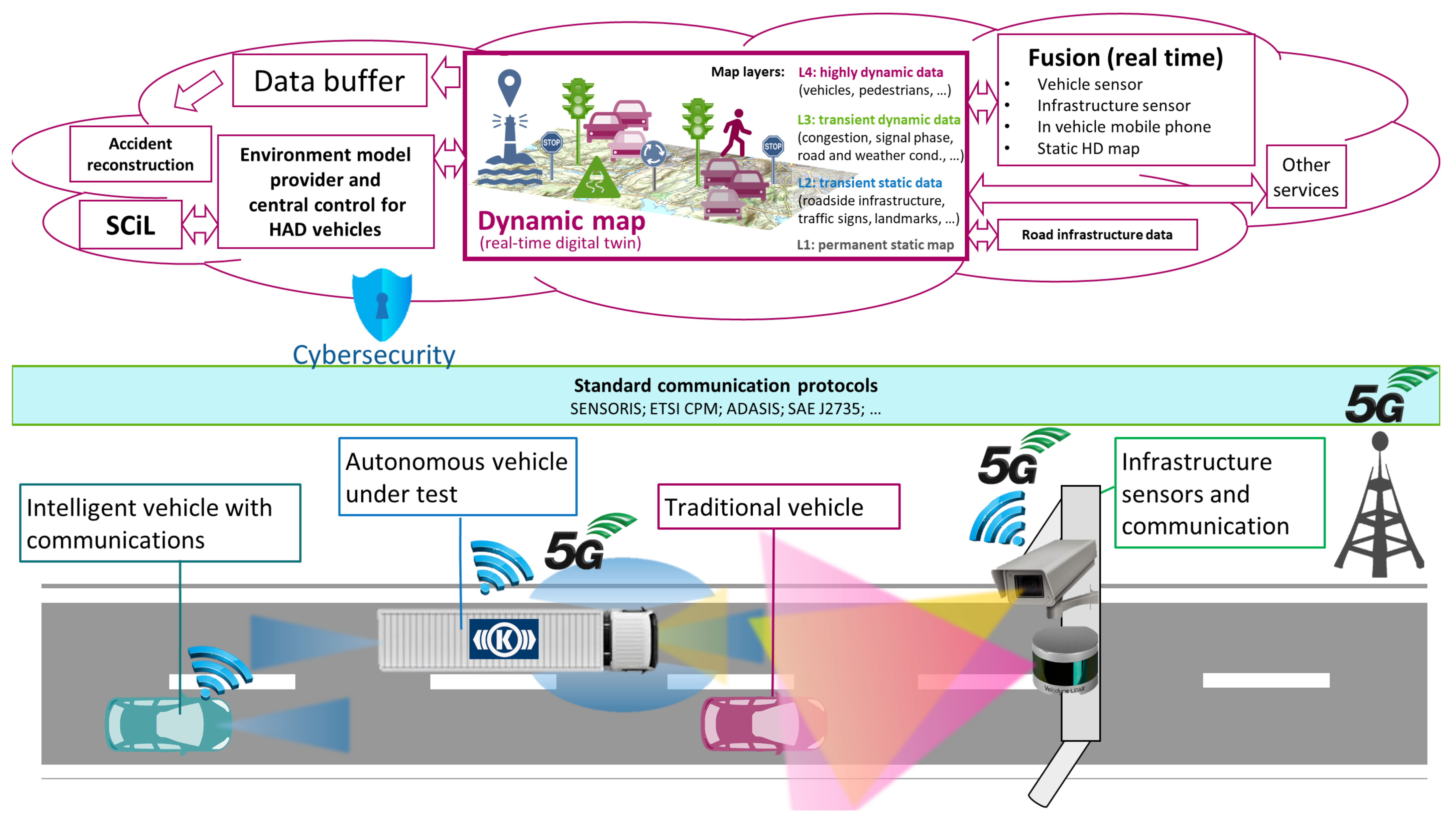
2.3. Ultra High Definition Mapping for Automated Driving
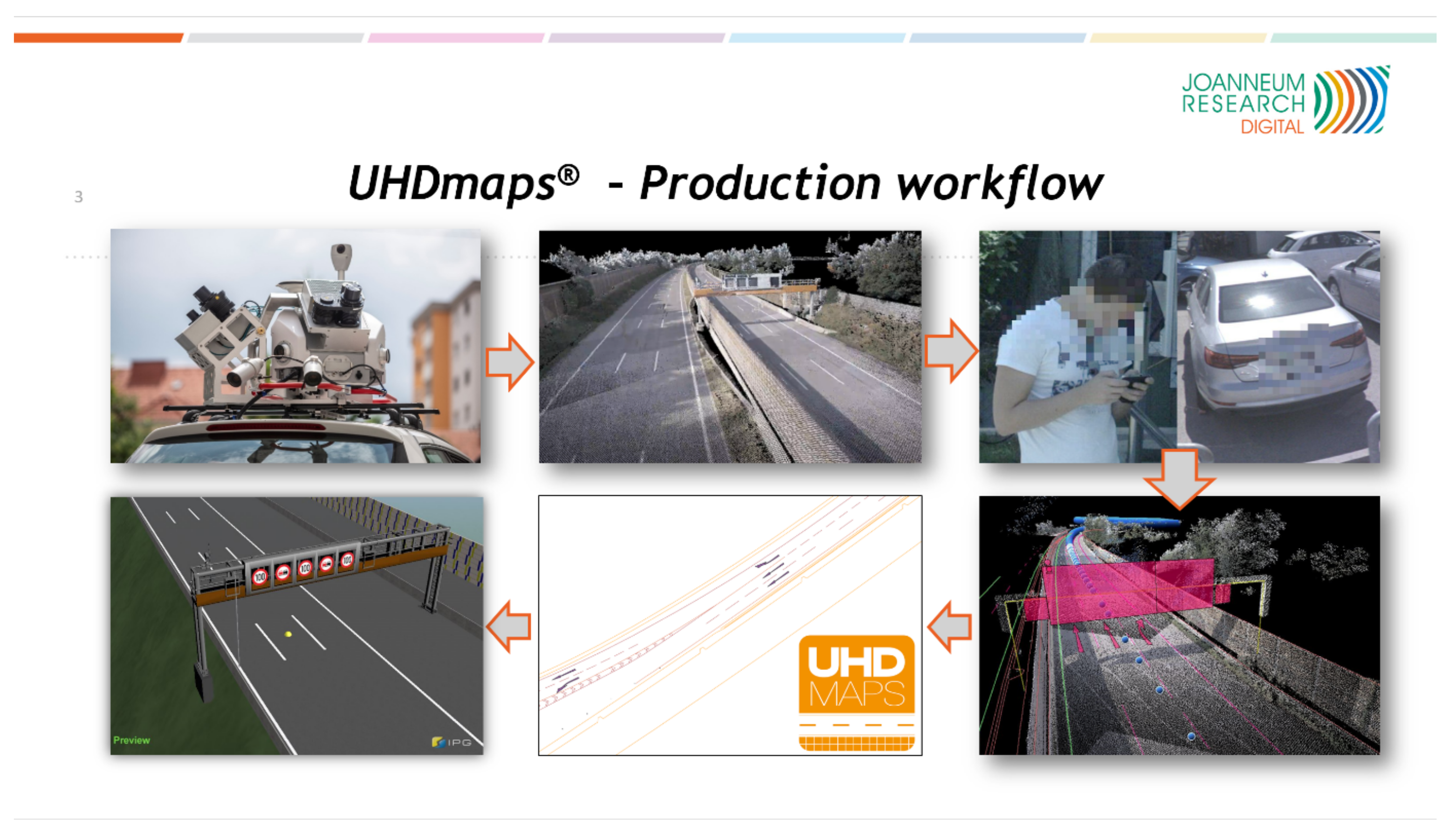
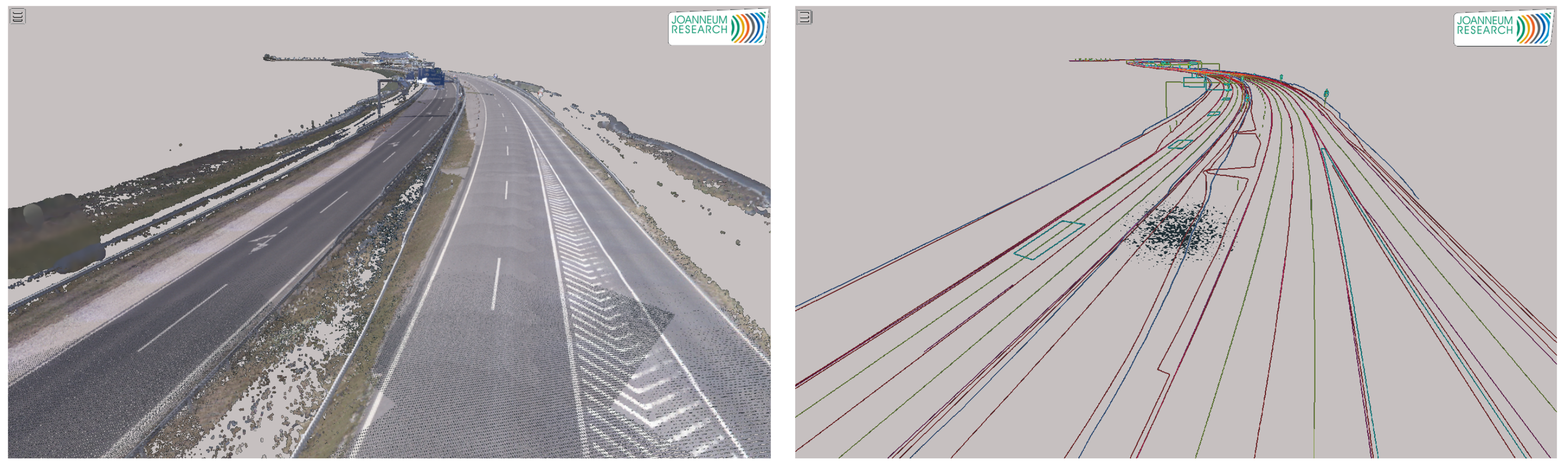
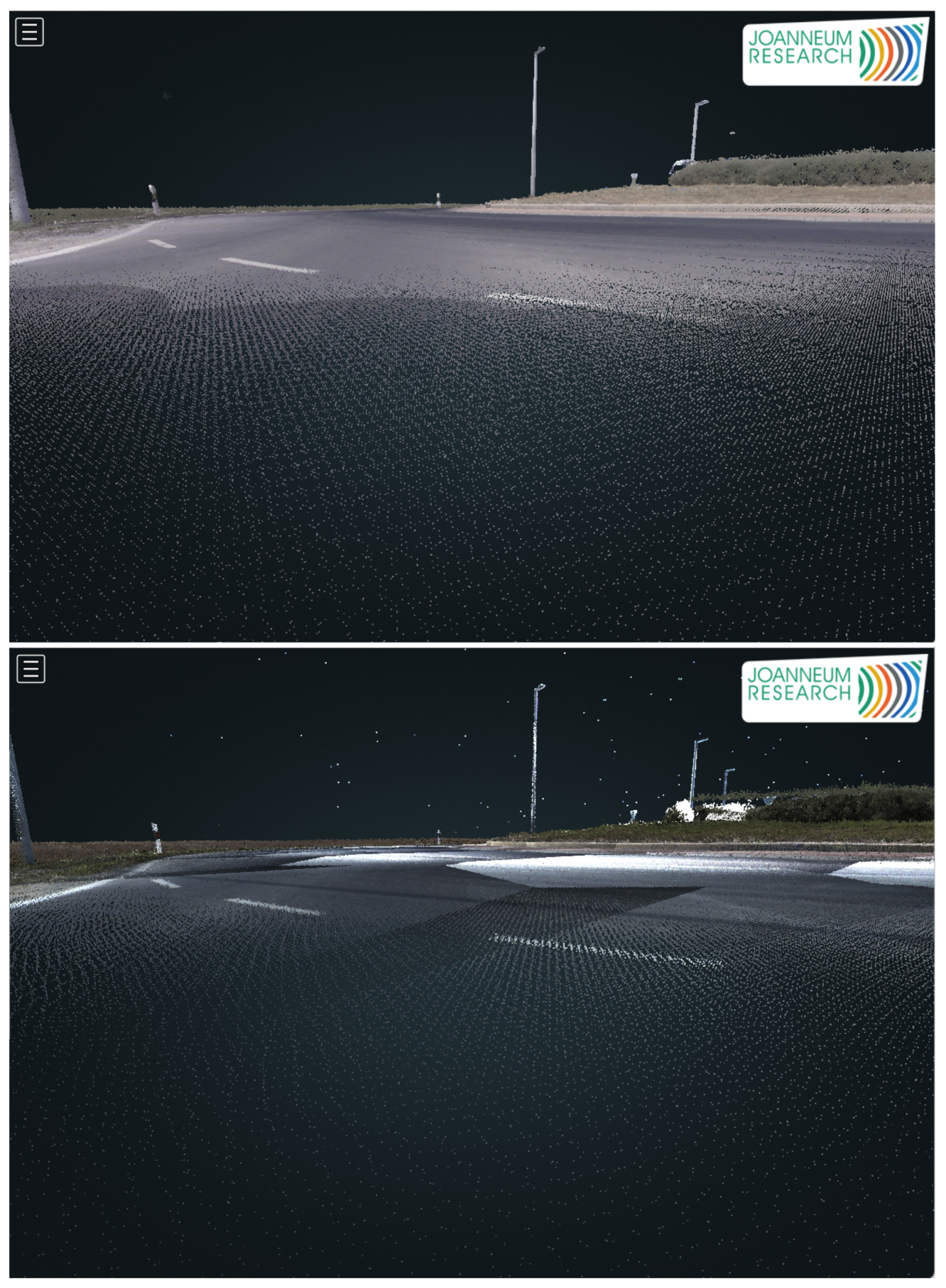
2.3.1. UHD Mapping by Joanneum Research
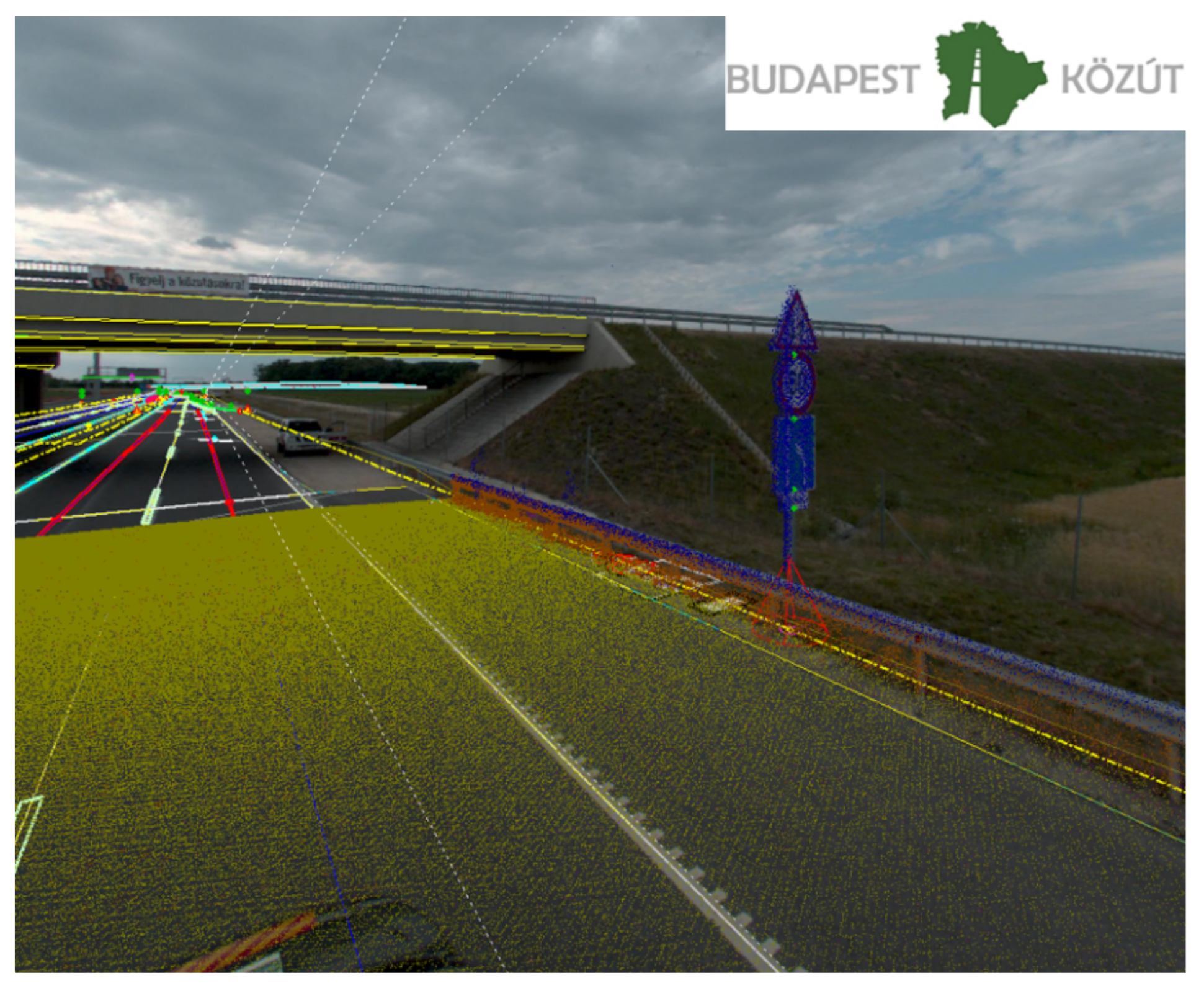
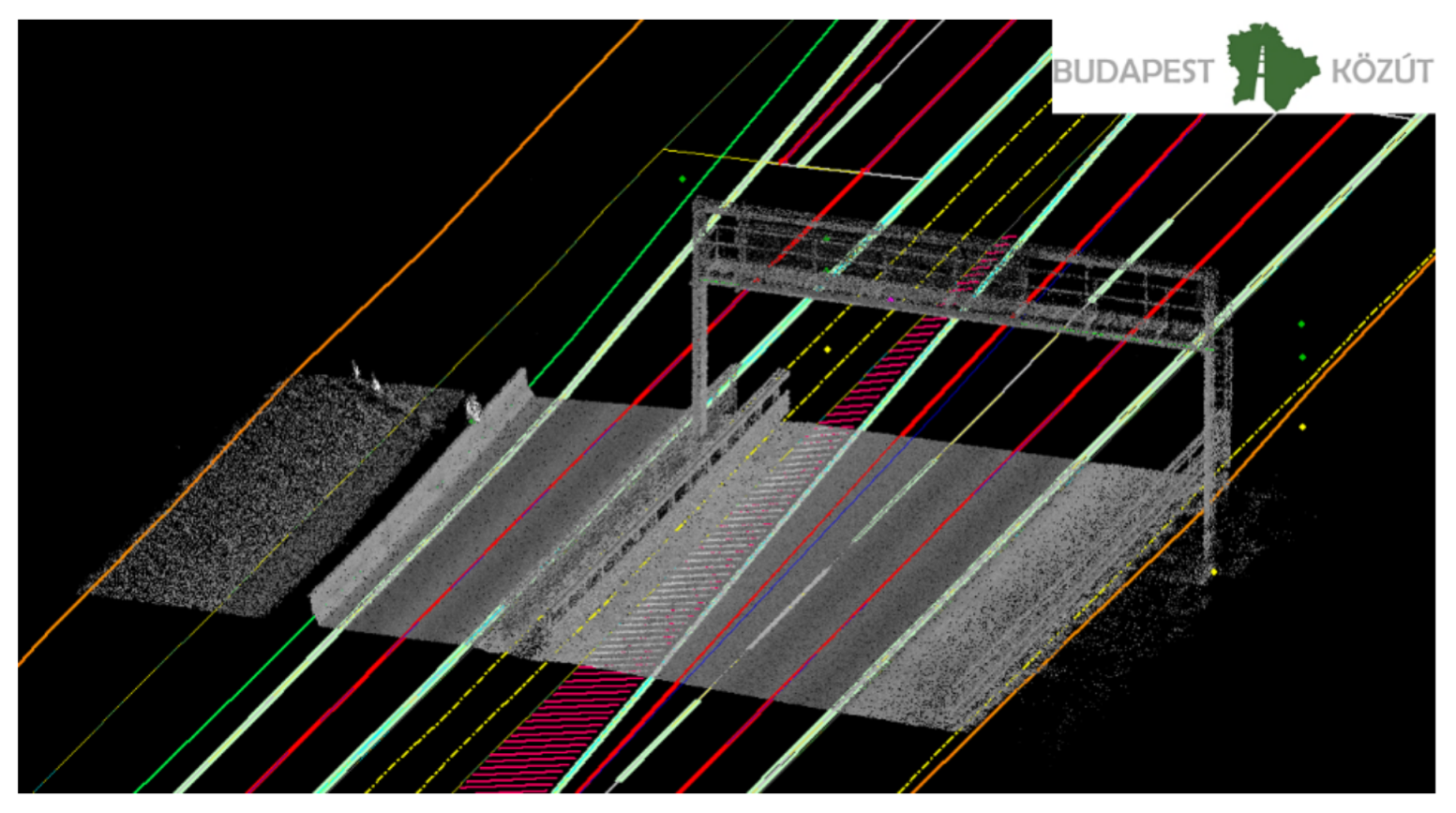
2.3.2. HD Mapping by Budapest Road Authority
2.3.3. Comparison of the Datasets Collected by Leica and RIEGL Laser Scanning Systems
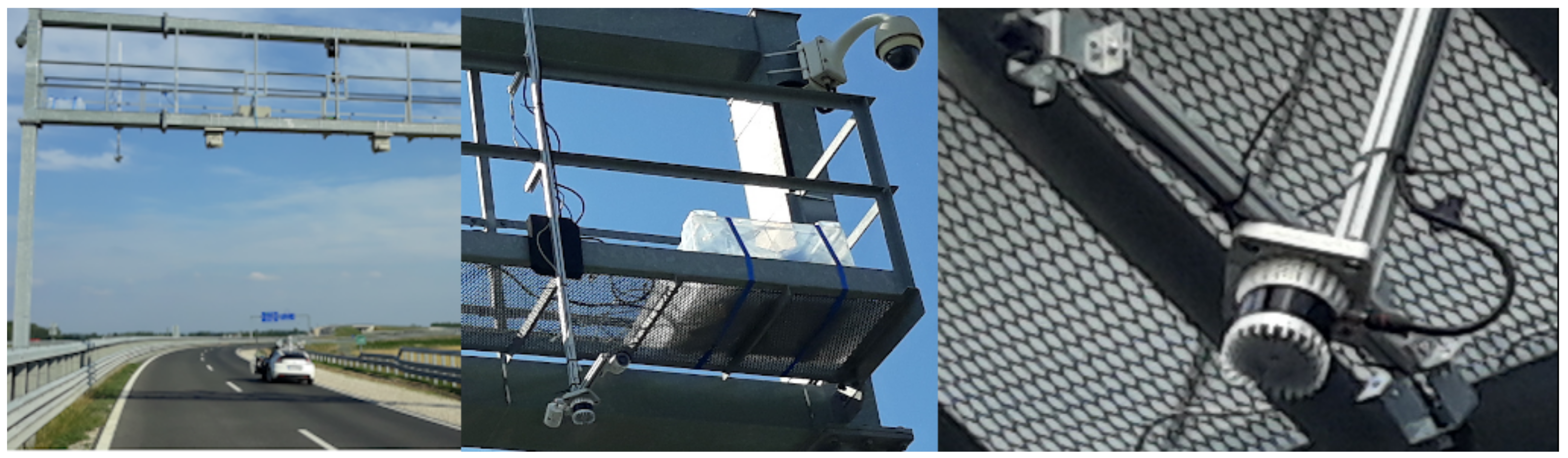
2.4. Infrastructure Sensors of the Team from Budapest University of Technology and Economics (BME)
2.5. Vehicles and Vehicle Sensors
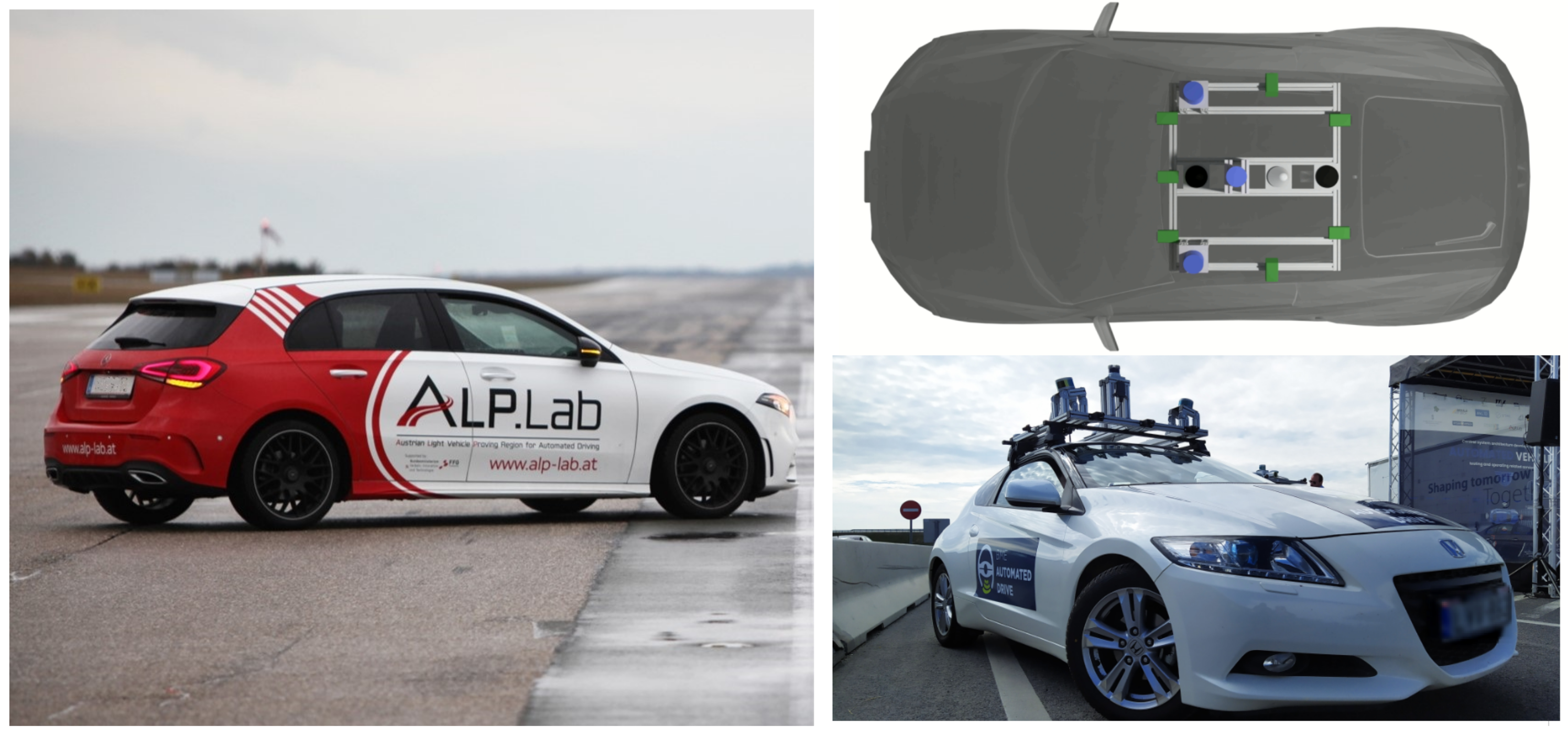
2.5.1. ALP.Lab Test Vehicle and Vehicle Sensors
2.5.2. BME Measurement Vehicle Sensors
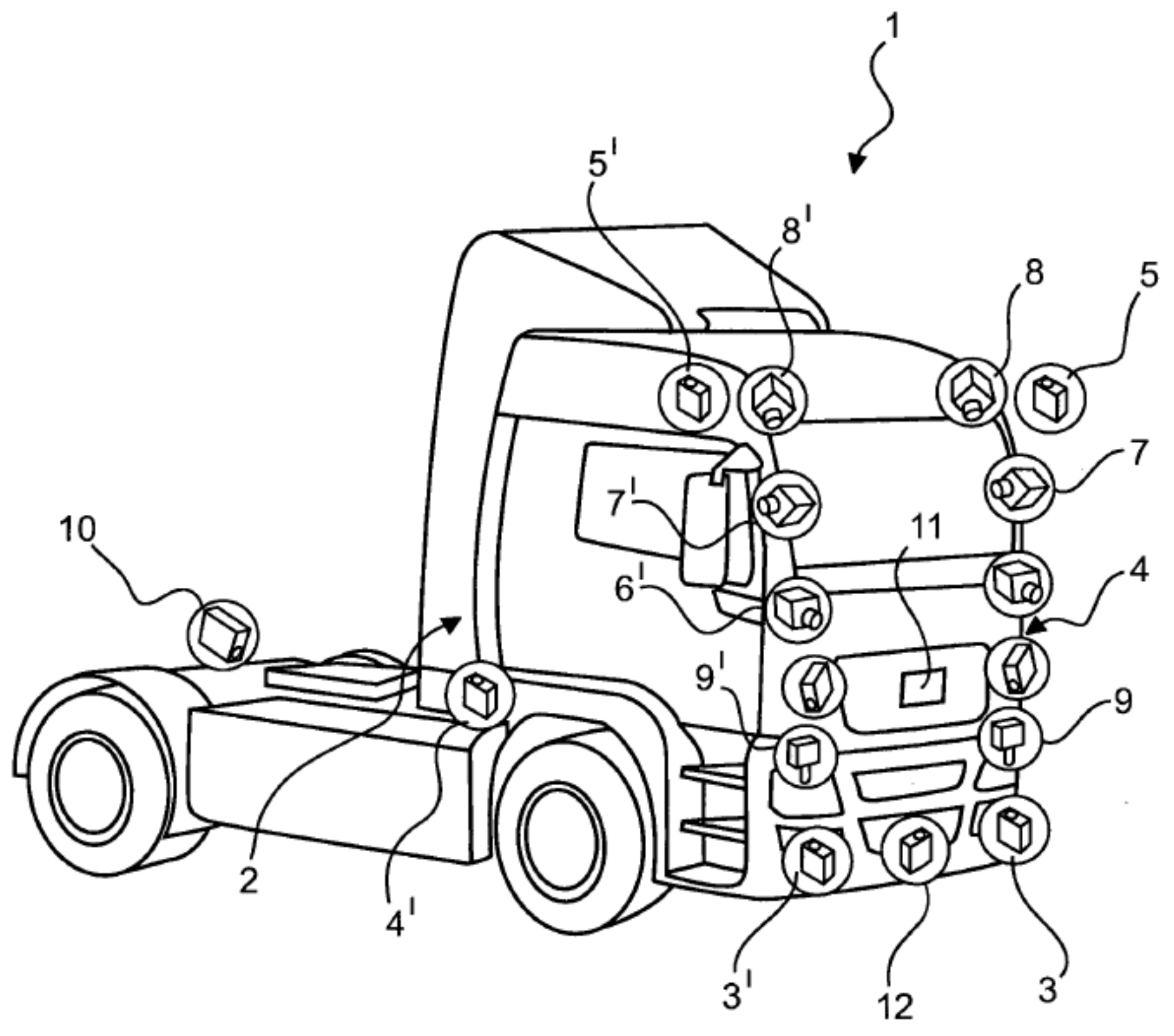
2.5.3. Knorr-Bremse Vehicles and Sensors
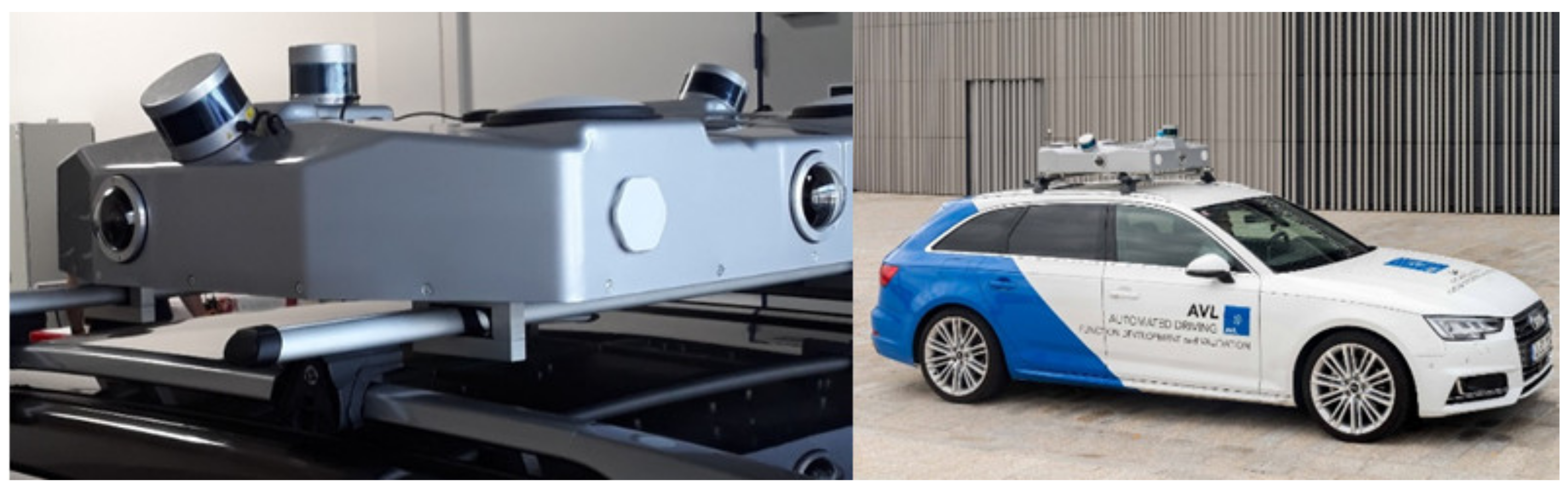
2.5.4. AVL Vehicles and Sensors
2.5.5. Virtual Vehicle AD Demonstrator and Sensors
2.5.6. Joanneum Research Vehicle and Sensors
2.5.7. TU Graz Vehicles and Sensors
2.5.8. Linz Center of Mechatronics GmbH Sensors
3. 5G Technology Based Measurement Results
3.1. 5G V2X State of the Art
3.2. Expected Results and Challenges
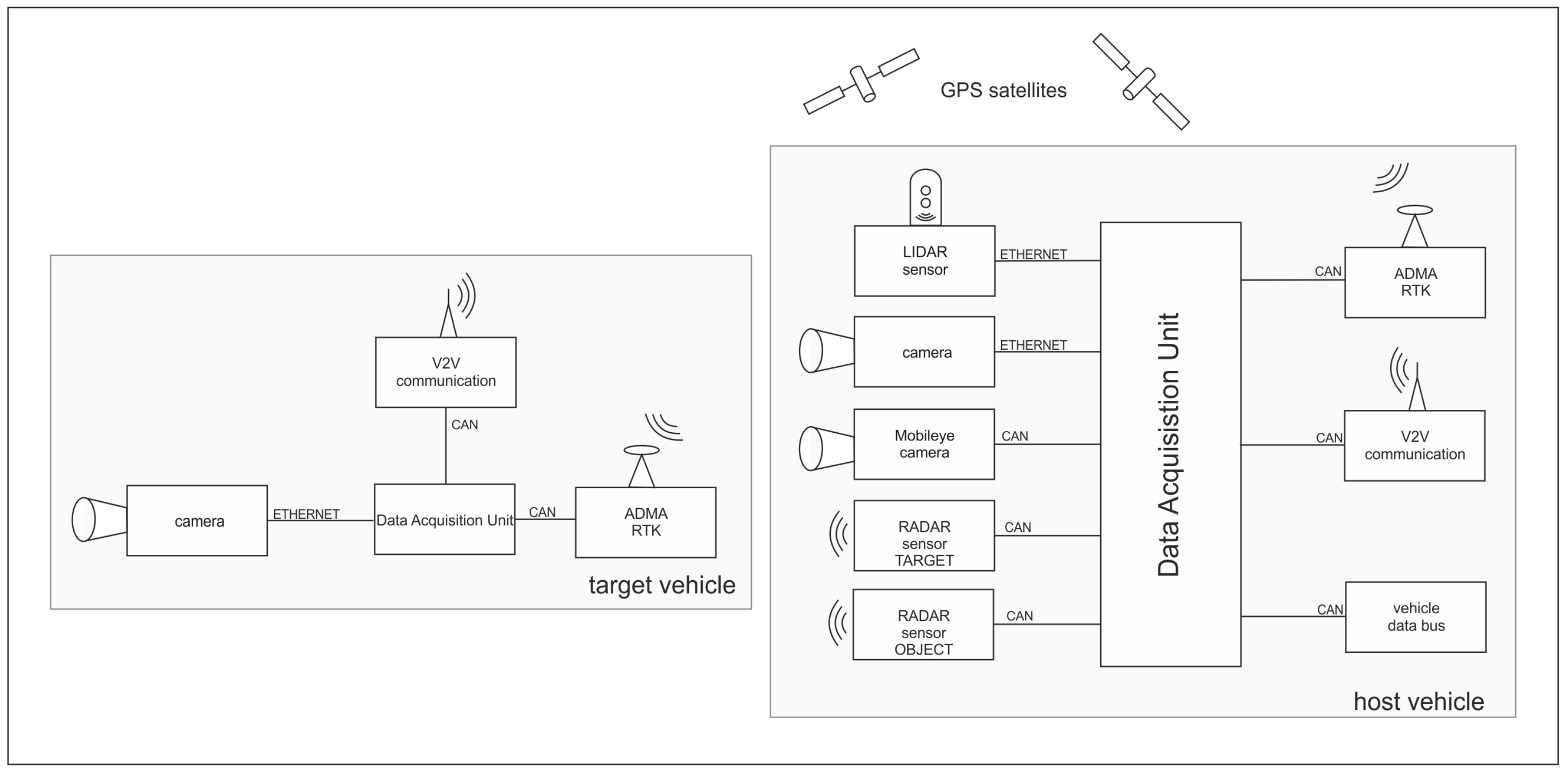
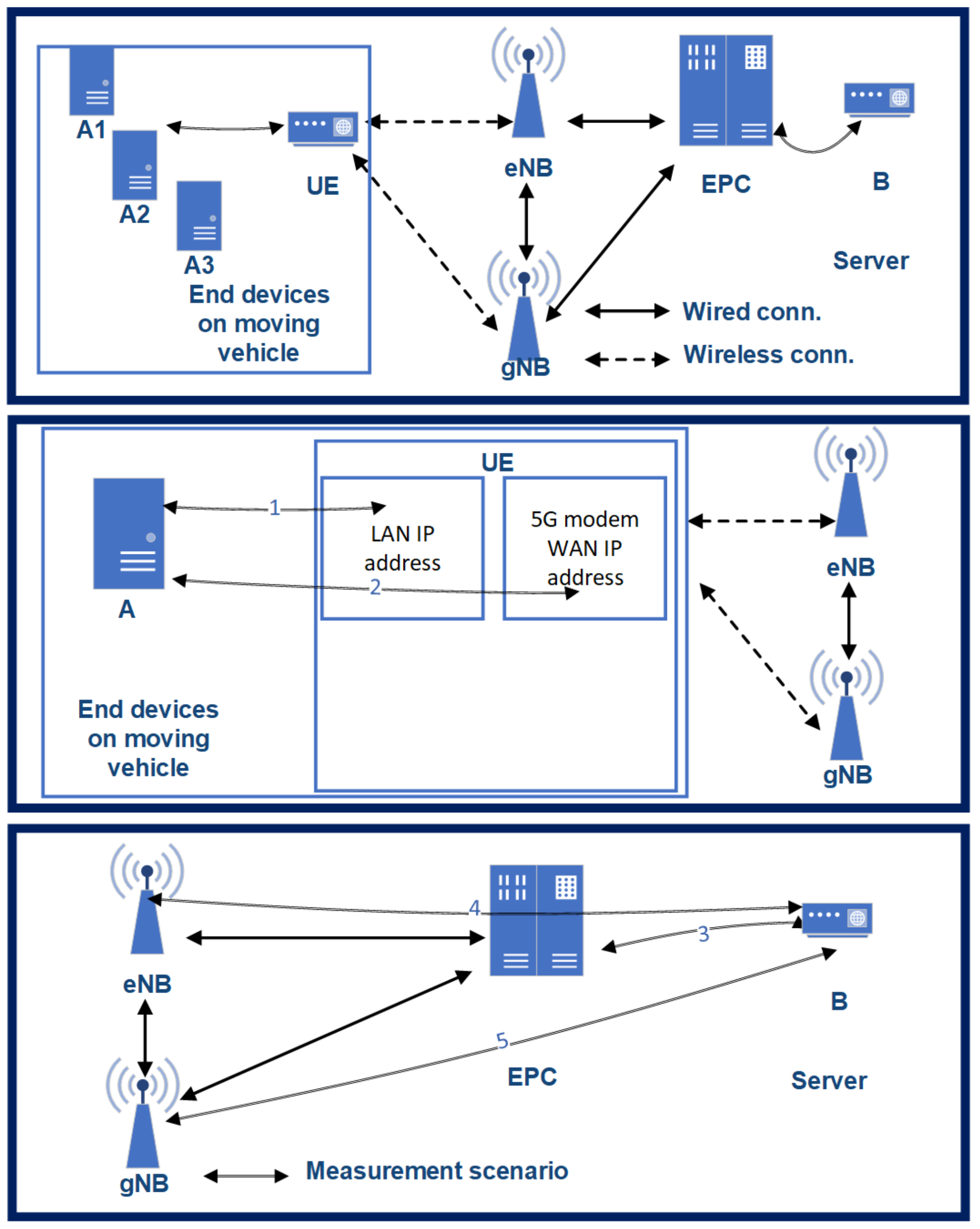
3.3. Measurement Architecture
3.4. Measuring the 5G Downlink NR Latency
- 1-way latency (): latency between (l-bw) A1 and B.
- Connection 1 (): l-bw the UE’s LAN interface (i/f) and the end-devices.
- Connection 2 (): l-bw UE’s WAN i/f and end-devices.
- Connection 3 (): l-bw EPC SGi i/f and server B.
- Connection 4 (): l-bw eNB’s s s1u i/f and server B.
- Connection 5 (): l-bw gNB’s s1u i/f and server B.
3.5. Measurement Method
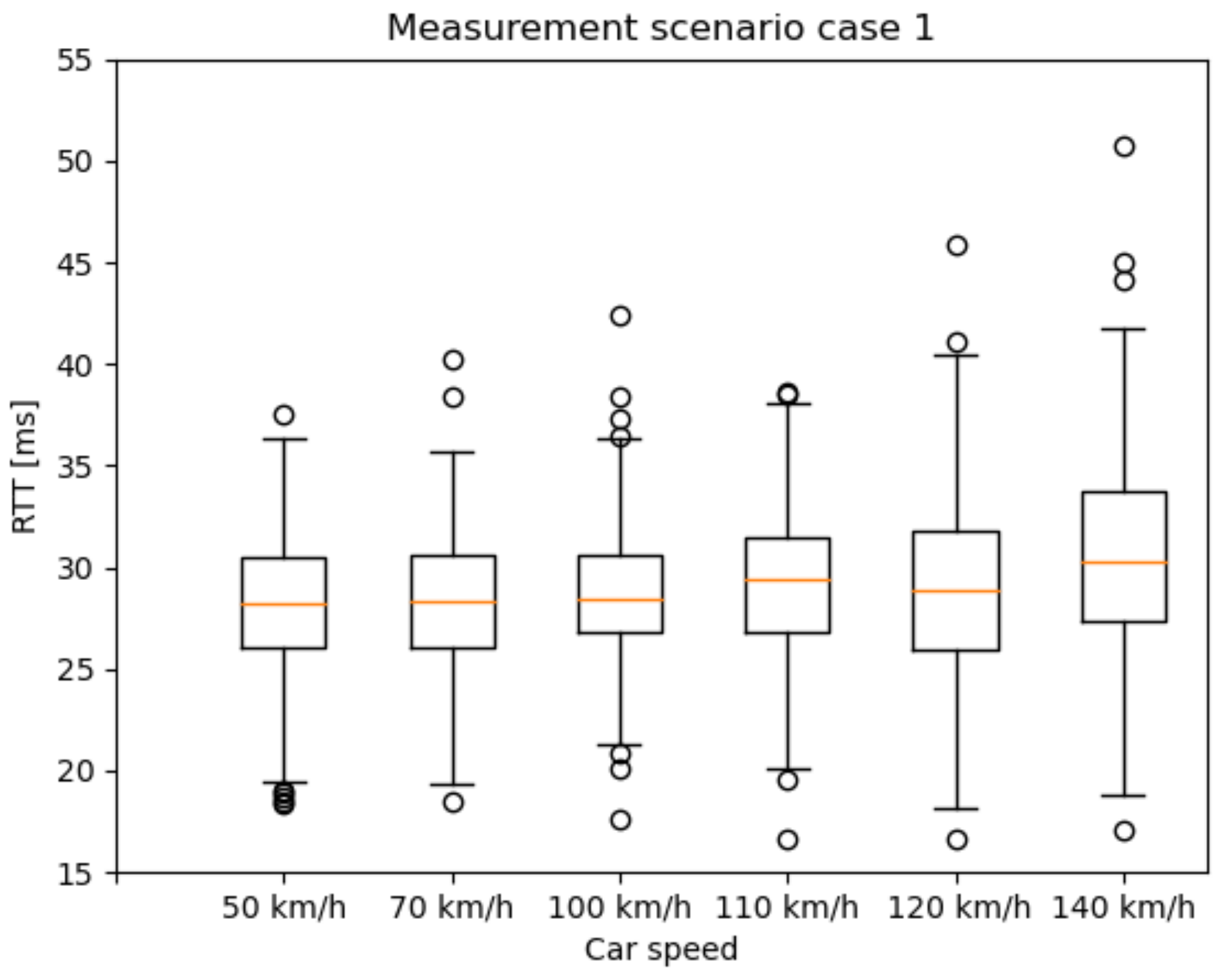
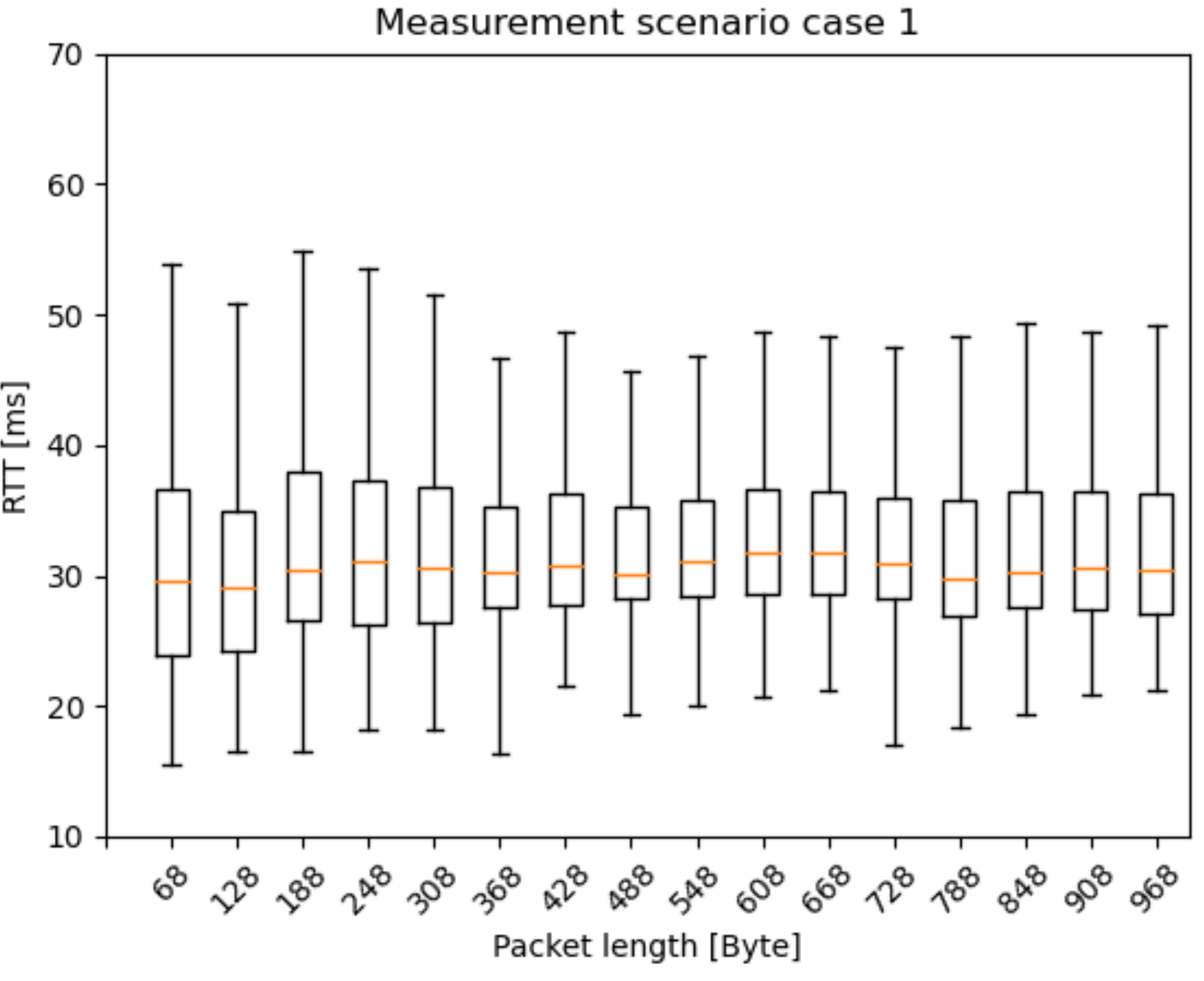
- Scenario 1: from 2 ms IAT and 60 Byte PL to 62 ms IAT and 960 Byte PL, incrementing 60 Byte PL by every iteration and 20 ms IAT by every fourth iteration;
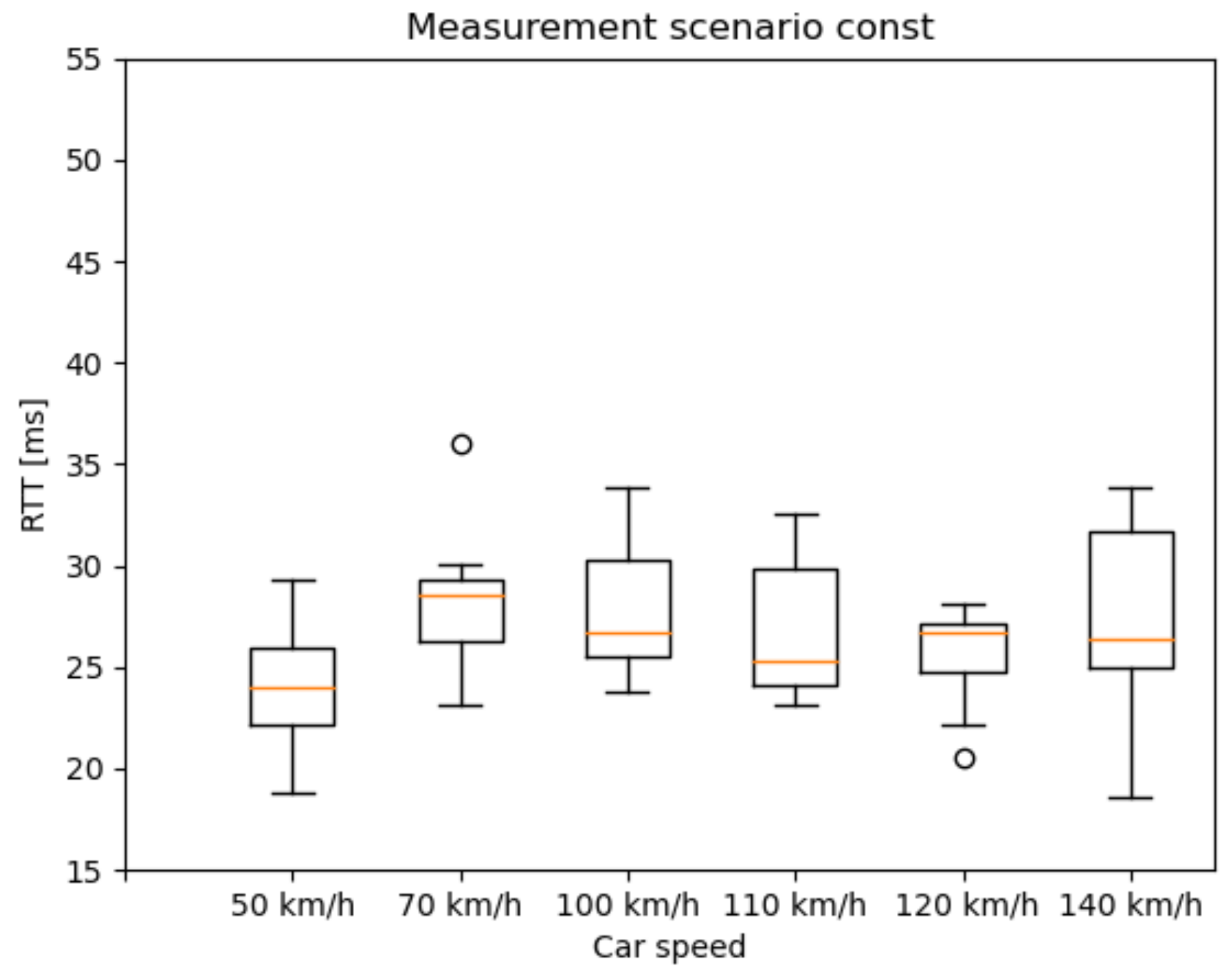
- Const: 2 ms IAT and 40 Byte PL.
3.6. Future Works
4. Measurement Results with Application Examples of the LIDAR, Camera, Radar, and GNSS Devices
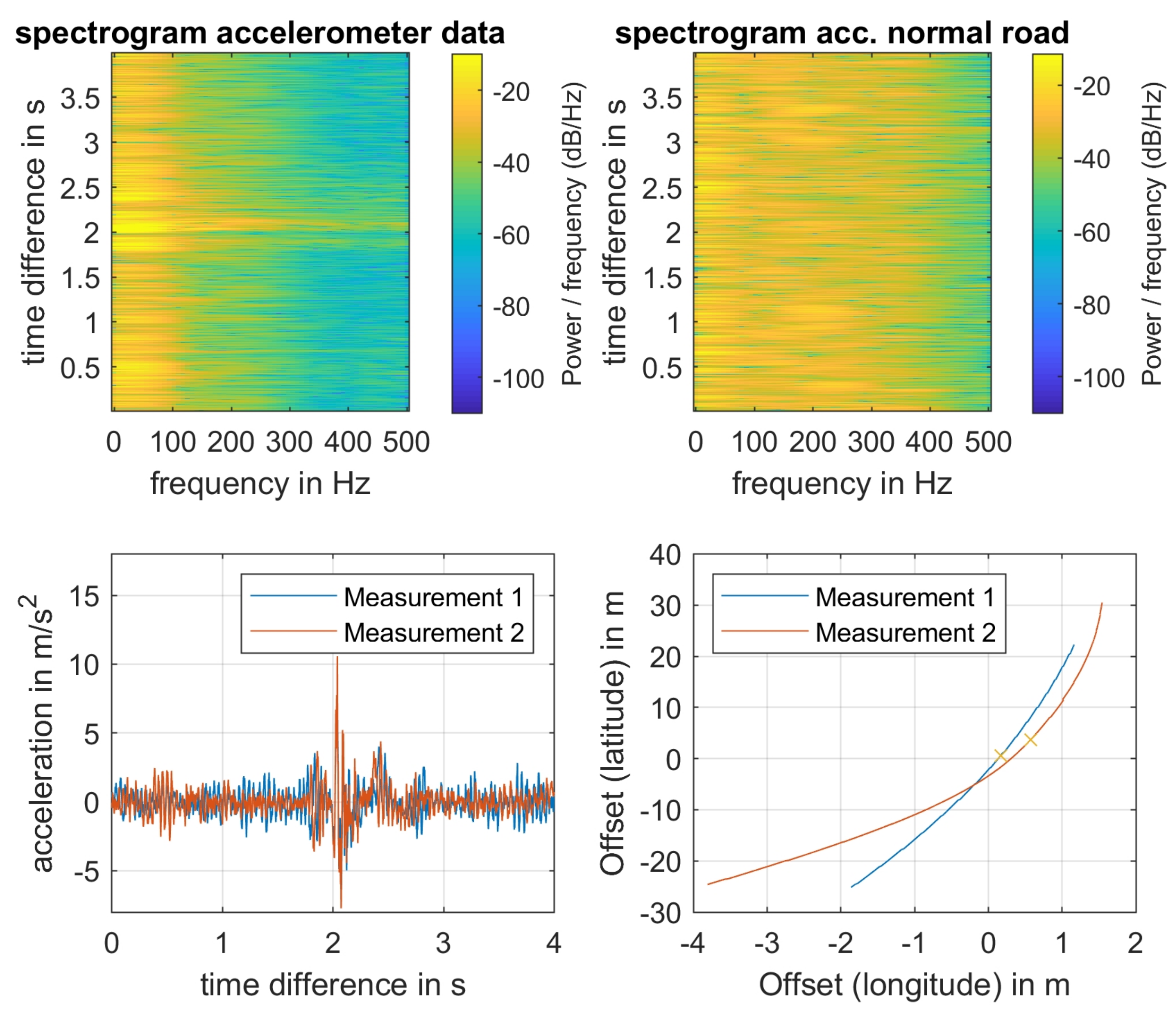
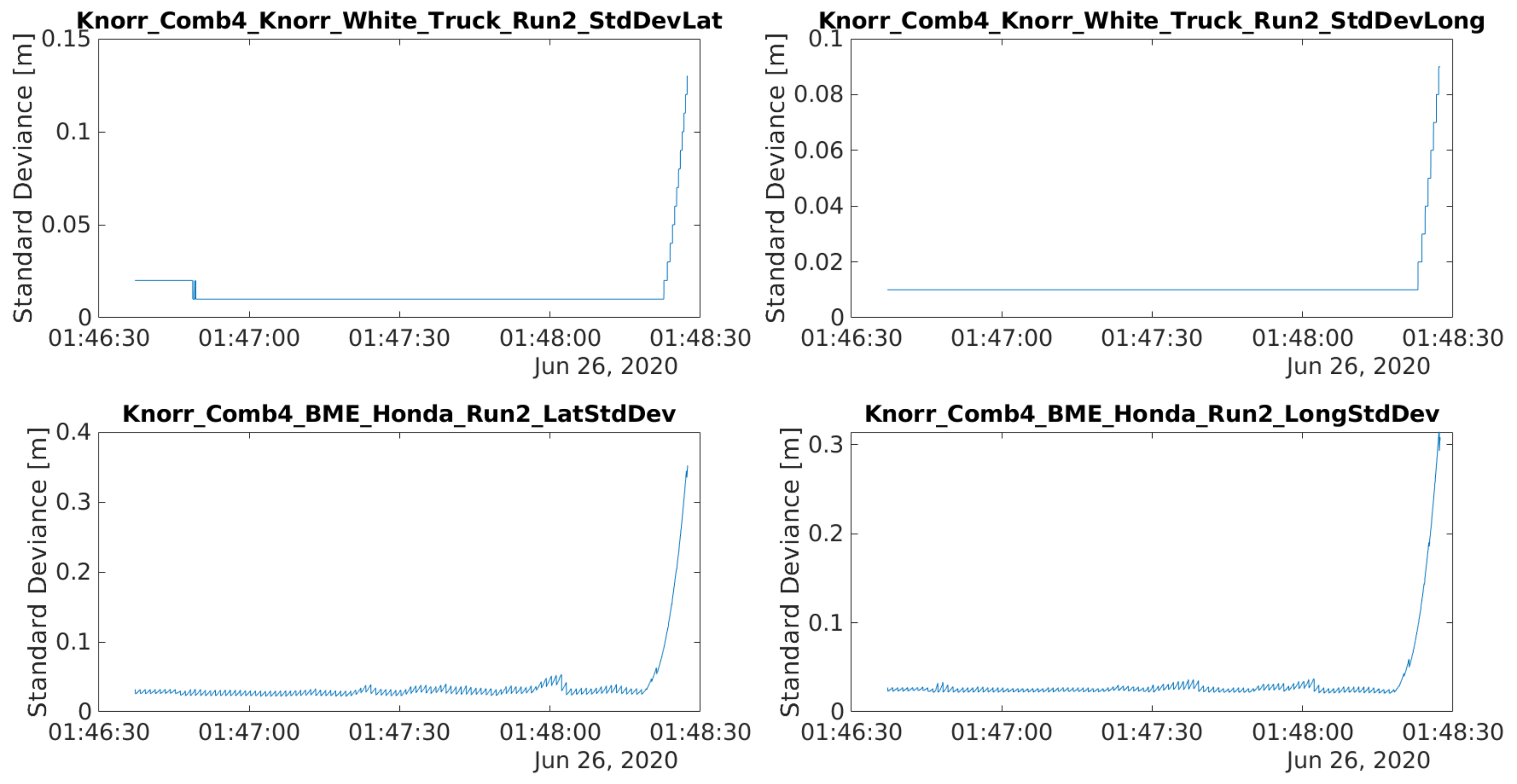
4.1. GPS Data Features
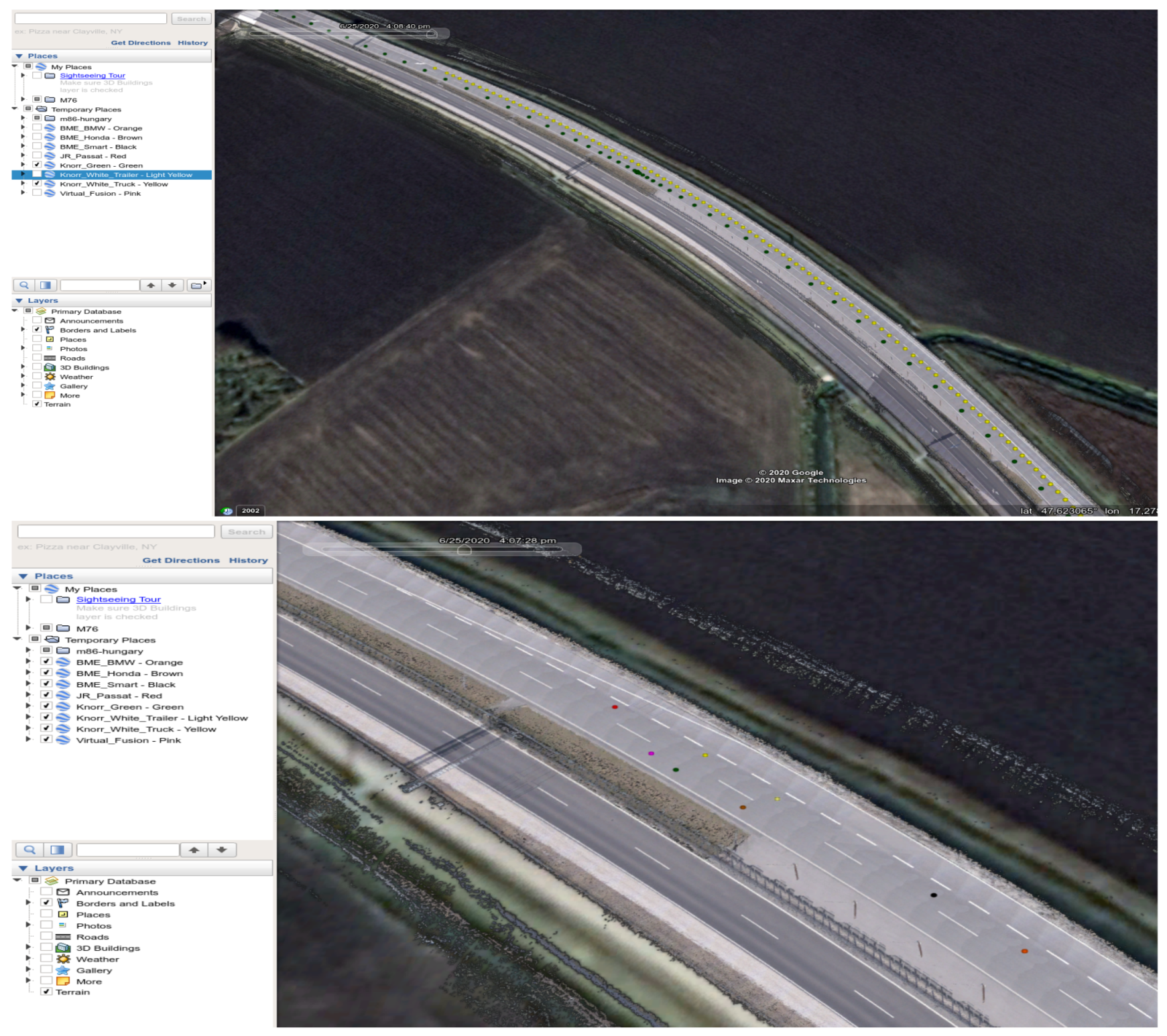
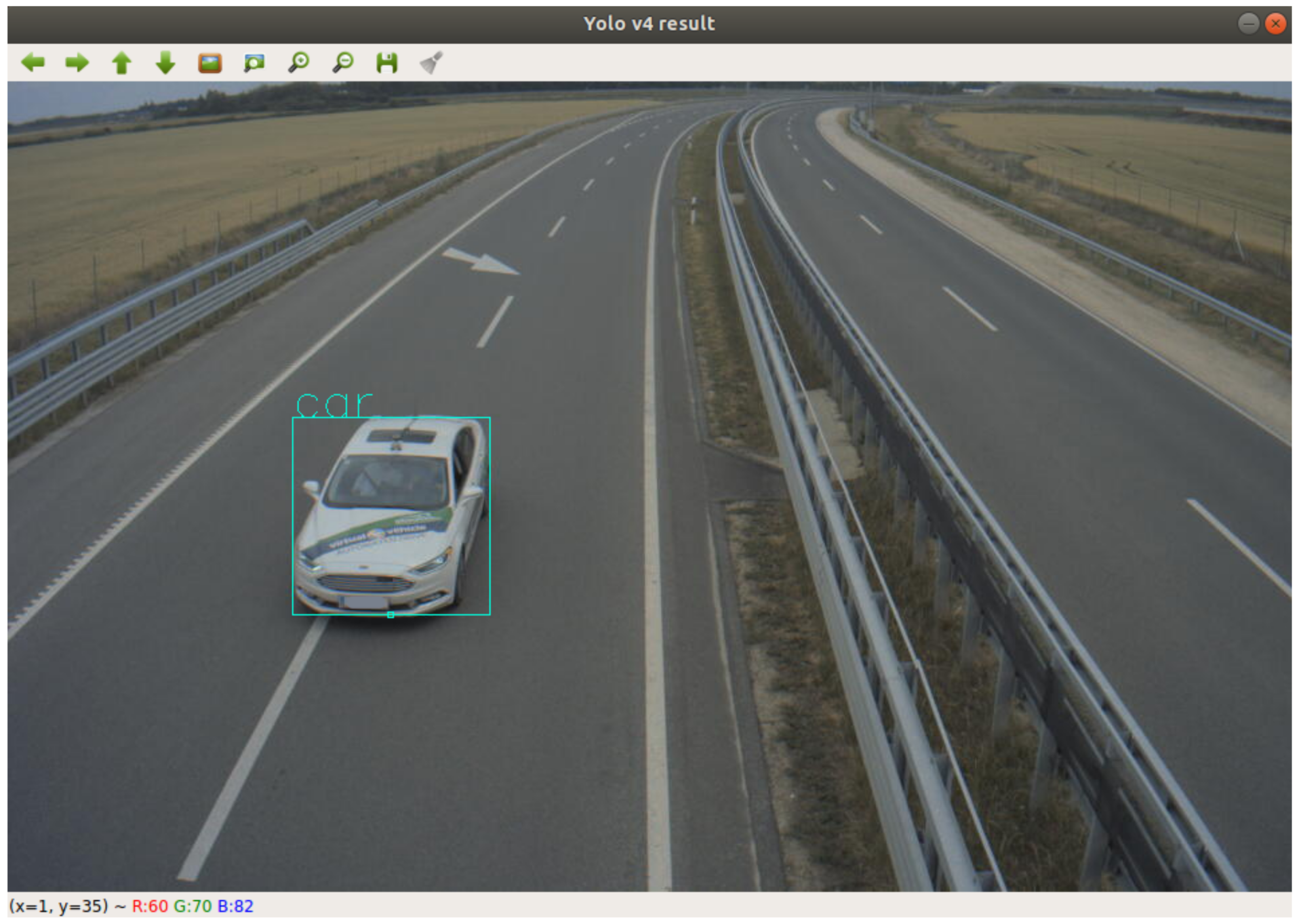
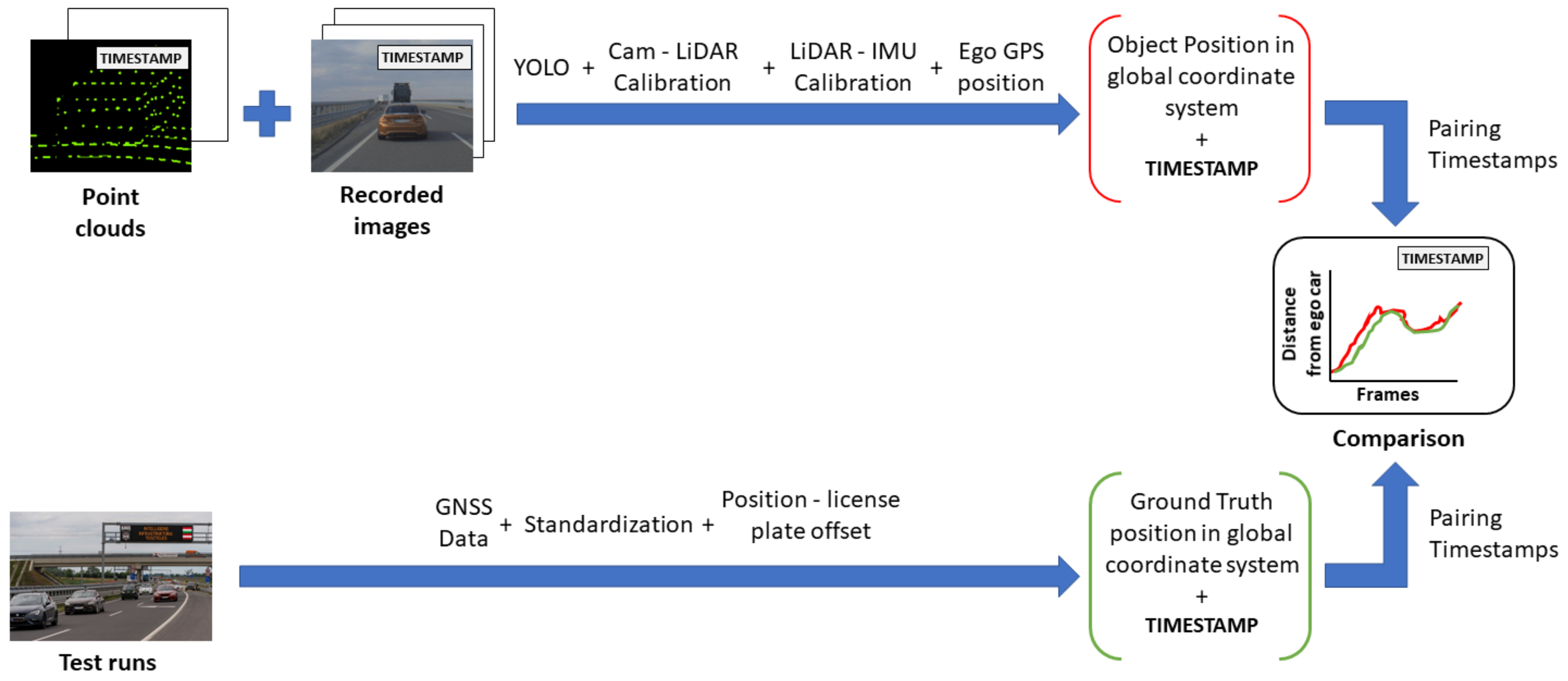
4.2. Ground Truth Information for Object Detection Algorithms
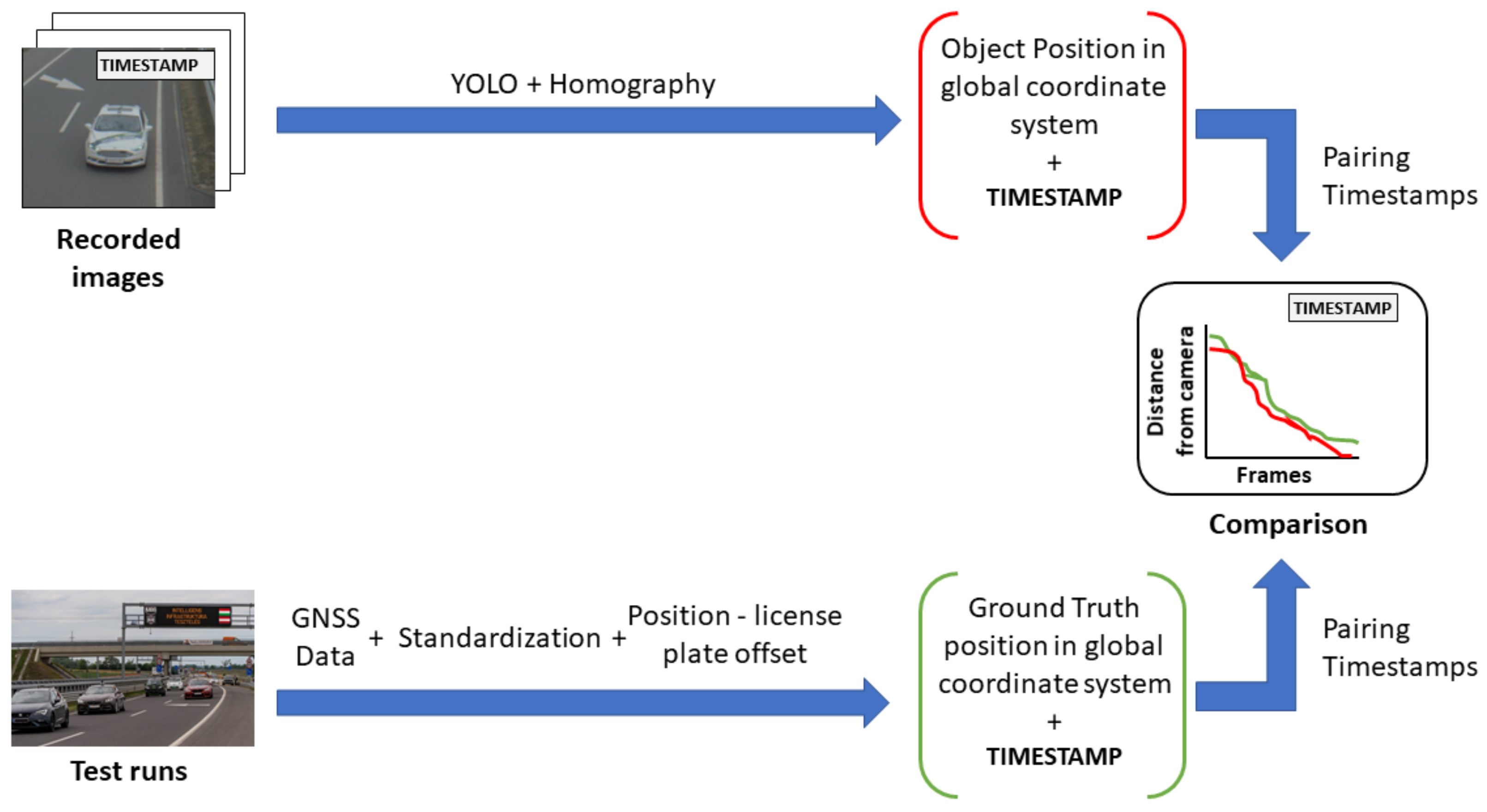
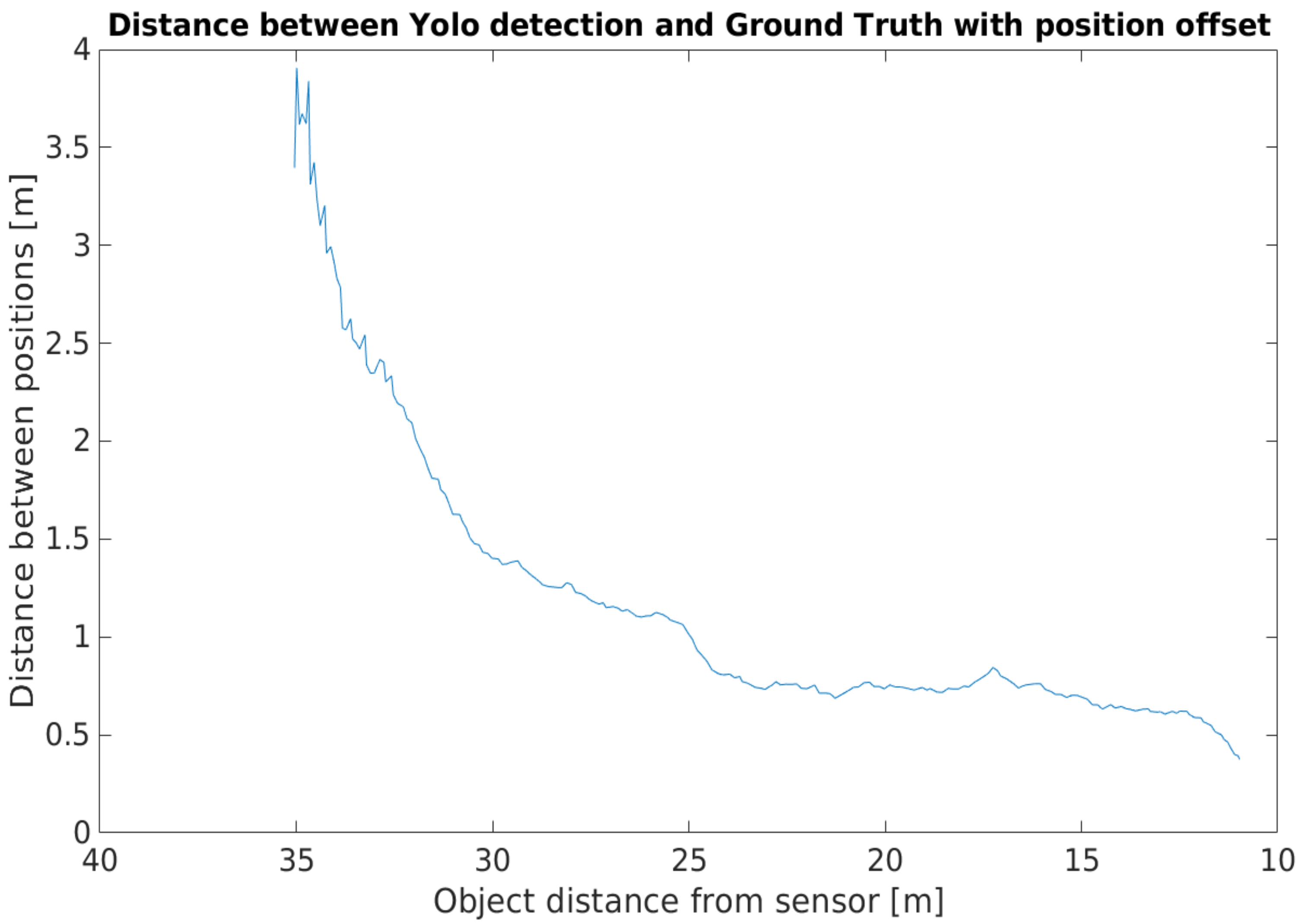
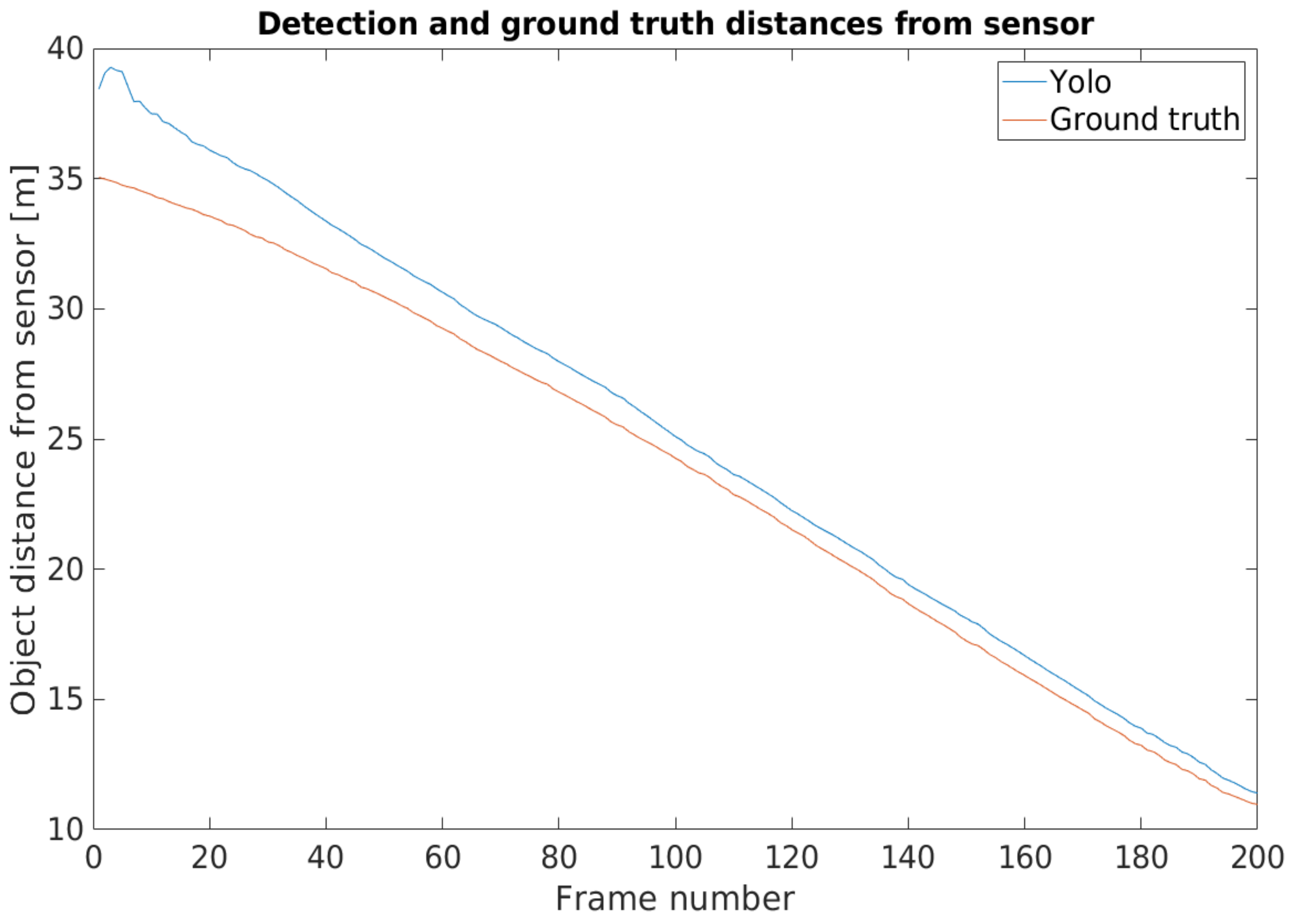
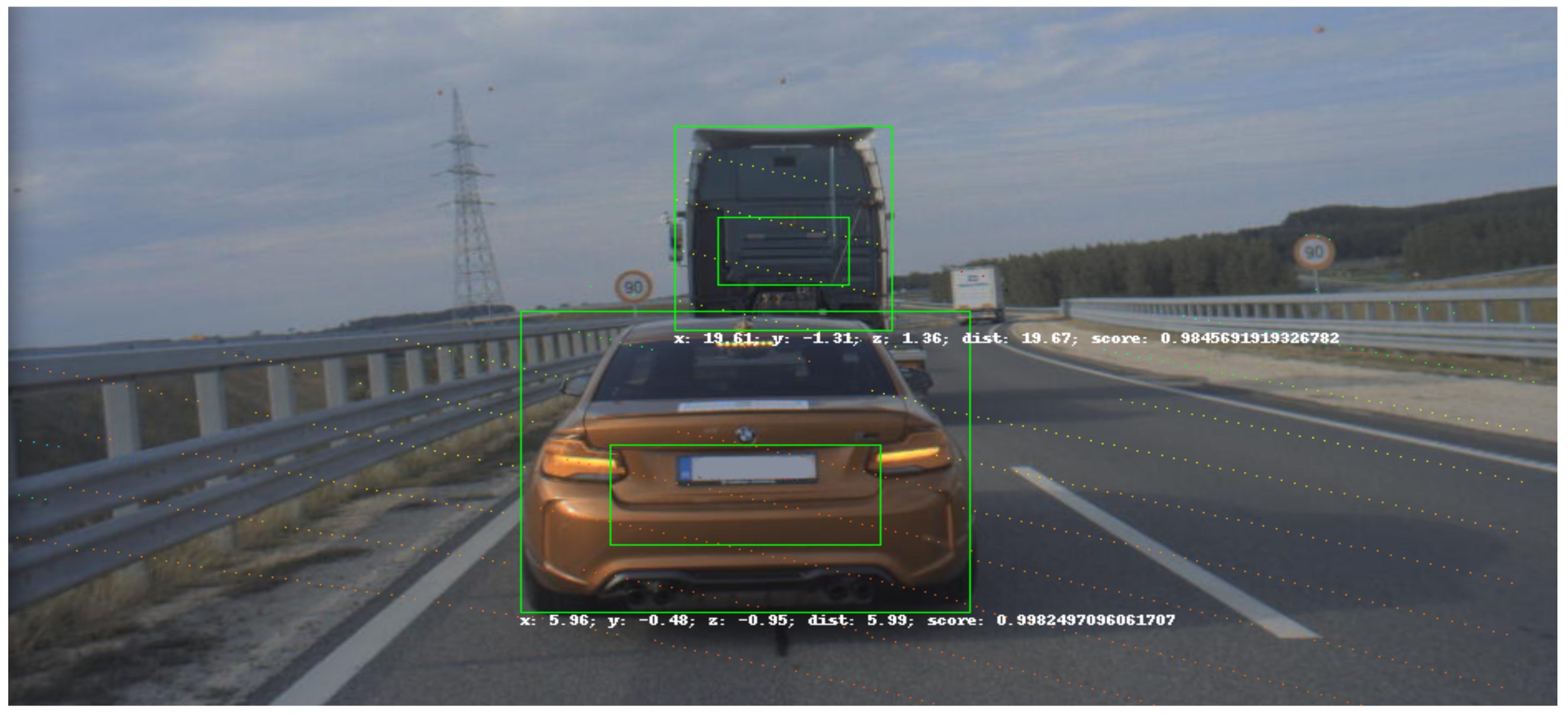
4.3. Example Application—Determine Object Position Based on Homography
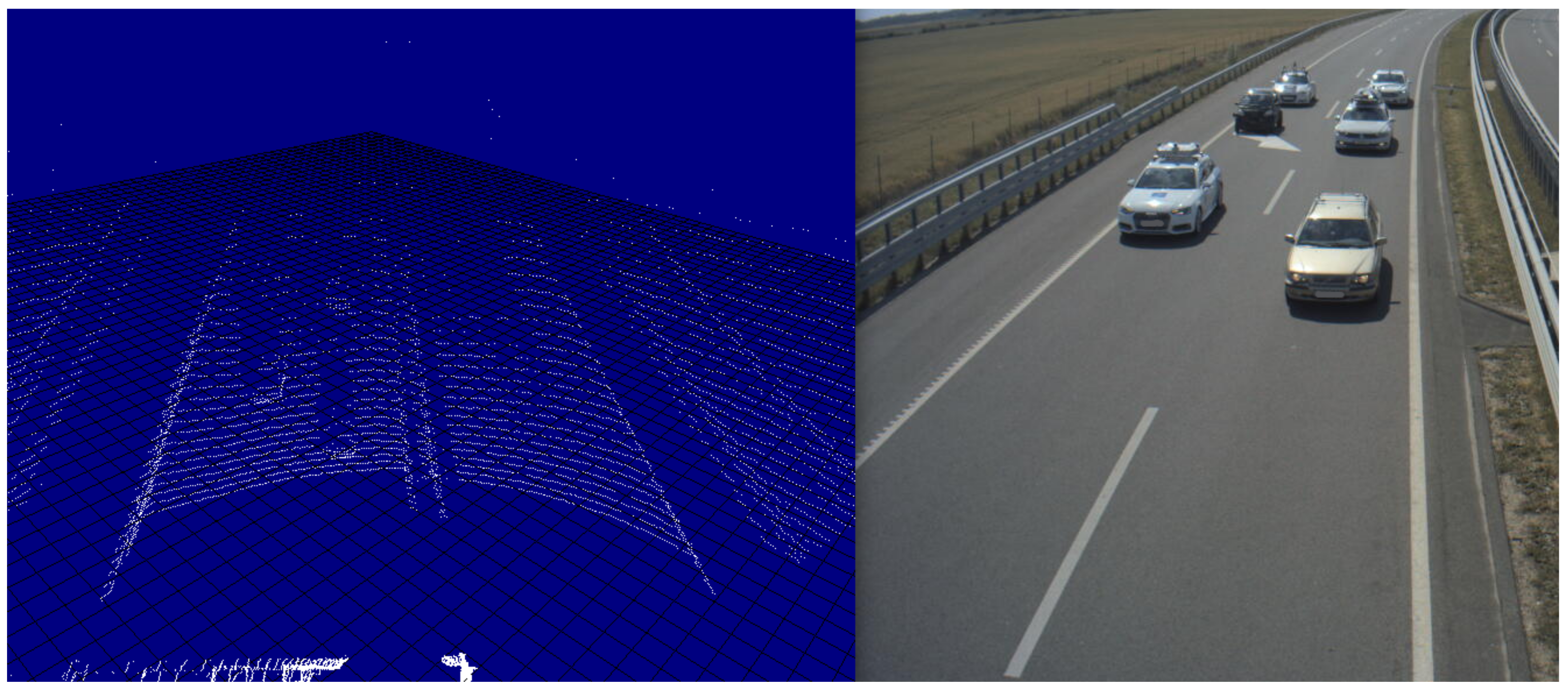
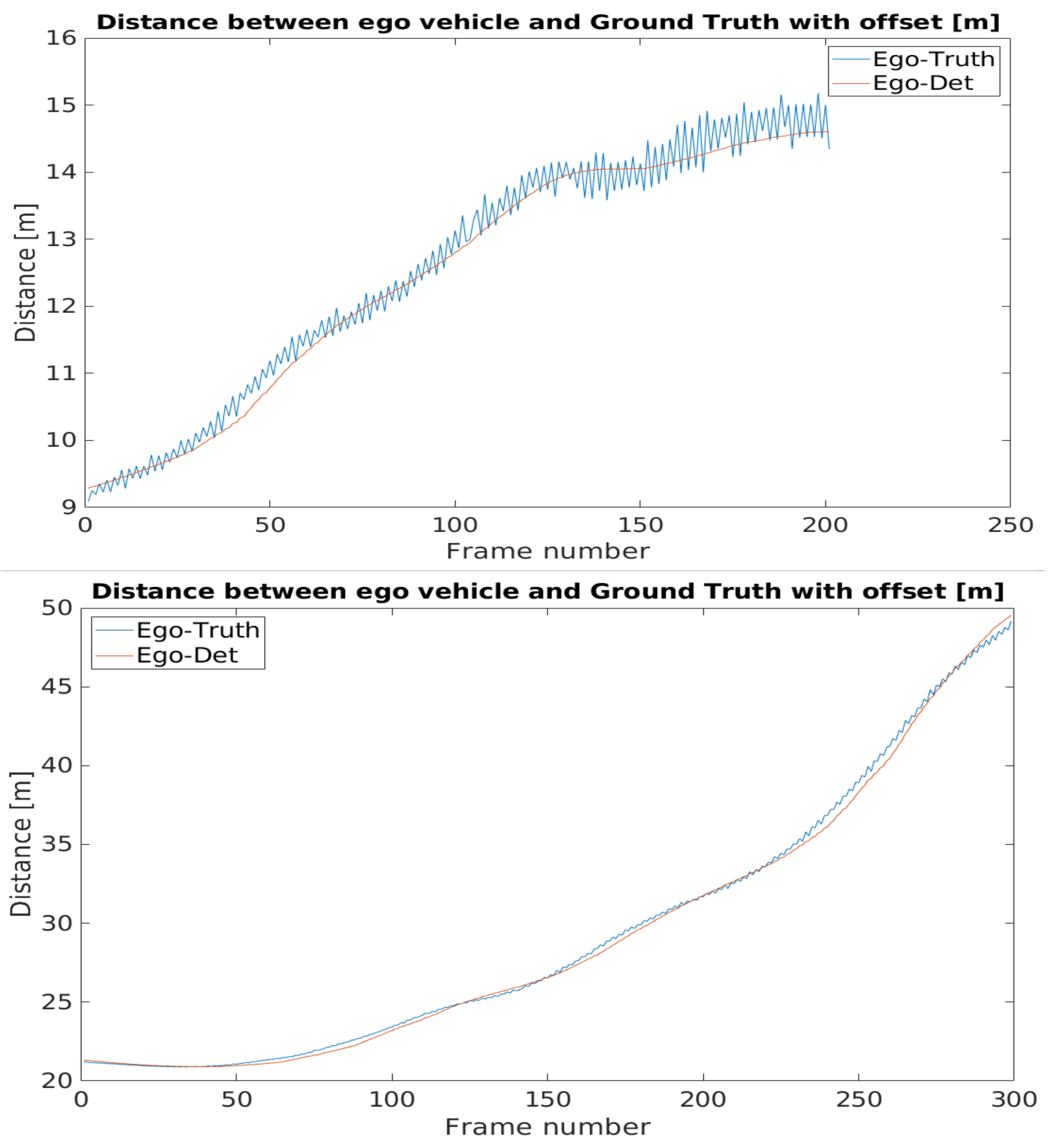
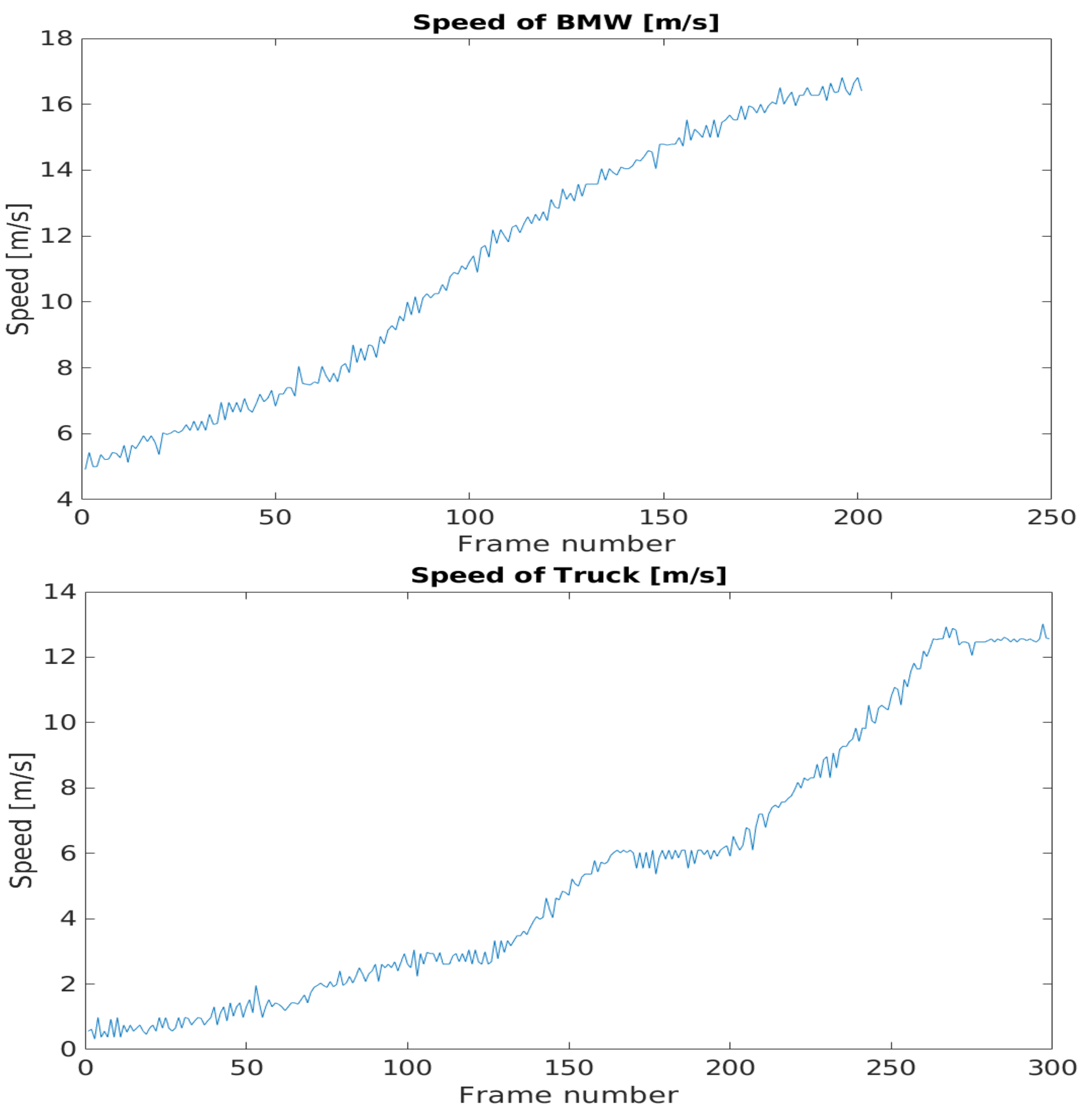
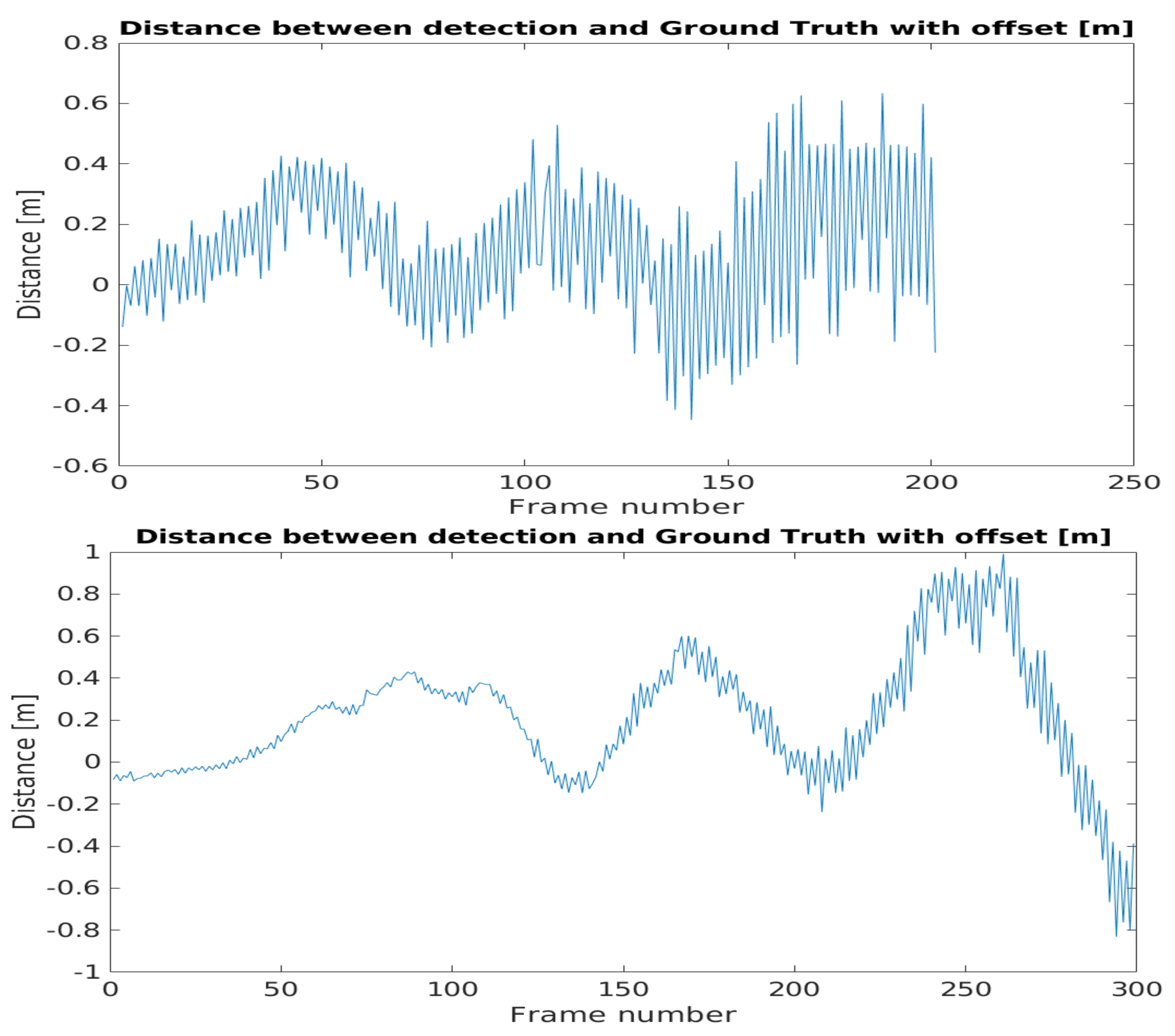
4.4. Example Application—Determine Object Position Based on Camera LIDAR Fusion
5. Conclusions
- Planning and managing a measurement campaign with several partners and with different sensors is a huge and complex task where success relies on thorough preparation.
- For high precision mapping, two datasets were collected using different high-tech instruments during the measurement campaign. Different capability of sensors are needed when identifying small details, such as traffic supplemental signs or when creating a surface model of the ground.
- Ground truth information for object detection algorithm is of crucial importance in the automotive testing field. The acquired point clouds and image recordings combined with the shared ground truth position information can be directly used for testing and validating neural network based object detection algorithms.
- The presented two application examples demonstrate the viability of the collected data during the M86 Measurement Campaign. This data set may support a large variety of solutions, for the test and validation of different kinds of approaches and techniques.
- 5G tests were carried out under different radio conditions. Different measurement scenarios provided latency results that behaved as expected beforehand.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Csiszár, C.; Földes, D. System Model for Autonomous Road Freight Transportation. Promet Traffic Transp. 2018, 30, 93–103. [Google Scholar] [CrossRef] [Green Version]
- Tettamanti, T.; Varga, I.; Szalay, Z. Impacts of autonomous cars from a traffic engineering perspective. Period. Polytech. Ser. Transp. Eng. 2016, 44, 244–250. [Google Scholar] [CrossRef] [Green Version]
- Szalay, Z.; Tettamanti, T.; Esztergár-Kiss, D.; Varga, I.; Bartolini, C. Development of a Test Track for Driverless Cars: Vehicle Design, Track Configuration, and Liability Considerations. Period. Polytech. Transp. Eng. 2018, 46, 29–35. [Google Scholar] [CrossRef] [Green Version]
- Solmaz, S.; Holzinger, F.; Mischinger, M.; Rudigier, M.; Reckenzaun, J. Novel Hybrid-Testing Paradigms for Automated Vehicle and ADAS Function Development. In Towards Connected and Autonomous Vehicle Highway: Technical, Security and Ethical Challenges; Innovations in Communications and Computing Series Book Series; EAI/Springer Nature Switzerland AG: Cham, Switzerland, 2021; p. 150. [Google Scholar] [CrossRef]
- Solmaz, S.; Rudigier, M.; Mischinger, M. A Vehicle-in-the-Loop Methodology for Evaluating Automated Driving Functions in Virtual Traffic. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 1465–1471. [Google Scholar] [CrossRef]
- Bényei, A.; Vida, G.; Pintér, K.; Szalay, Z.; Ágoston, G. Evaluation of Highway-pilot Function Based on FMEA Safety Analysis. Period. Polytech. Transp. Eng. 2020, 48, 253–259. [Google Scholar] [CrossRef]
- Gupta, N.; Khosravy, M.; Patel, N.; Dey, N.; Gupta, S.; Darbari, H.; Crespo, R.G. Economic data analytic AI technique on IoT edge devices for health monitoring of agriculture machines. Appl. Intell. 2020, 50, 3990–4016. [Google Scholar] [CrossRef]
- Gupta, N.; Gupta, S.; Khosravy, M.; Dey, N.; Joshi, N.; Crespo, R.G.; Patel, N. Economic IoT strategy: The future technology for health monitoring and diagnostic of agriculture vehicles. J. Intell. Manuf. 2020. [Google Scholar] [CrossRef]
- Akbari, B.; Thiyagalingam, J.; Lee, R.; Thia, K. A Multilane Tracking Algorithm Using IPDA with Intensity Feature. Sensors 2021, 21, 461. [Google Scholar] [CrossRef] [PubMed]
- Ma, W.; Qian, S. High-Resolution Traffic Sensing with Probe Autonomous Vehicles: A Data-Driven Approach. Sensors 2021, 21, 464. [Google Scholar] [CrossRef]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef] [Green Version]
- Park, C.; Chung, S.; Lee, H. Vehicle-in-the-Loop in Global Coordinates for Advanced Driver Assistance System. Appl. Sci. 2020, 10, 2645. [Google Scholar] [CrossRef] [Green Version]
- Szalay, Z.; Ficzere, D.; Tihanyi, V.; Magyar, F.; Soós, G.; Varga, P. 5G-Enabled Autonomous Driving Demonstration with a V2X Scenario-in-the-Loop Approach. Sensors 2020, 20, 7344. [Google Scholar] [CrossRef] [PubMed]
- Horváth, M.T.; Lu, Q.; Tettamanti, T.; Török, Á.; Szalay, Z. Vehicle-in-the-loop (VIL) and scenario-in-the-loop (SCIL) automotive simulation concepts from the perspectives of traffic simulation and traffic control. Transp. Telecommun. J. 2019, 20, 153–161. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.J. An Overview of the DSRC/WAVE Technology. In Quality, Reliability, Security and Robustness in Heterogeneous Networks; Zhang, X., Qiao, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 544–558. [Google Scholar]
- 3GPP. Service Requirements for Enhanced V2X Scenarios; TS 22.186 v16.2.0, 3rd Generation Partnership Project; ETSI: Valbonne, France, 2019. [Google Scholar]
- Soós, G.; Ficzere, D.; Seres, T.; Veress, S.; Németh, I. Business opportunities and evaluation of non-public 5G cellular networks—A survey. Infocommun. J. 2020, 12, 31–38. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The KITTI vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar] [CrossRef]
- U.S. Department of Transportation; Federal Highway Administration. Next Generation Simulation Program (NGSIM). 2007. Available online: http://ops.fhwa.dot.gov/trafficanalysistools/ngsim.htm2006 (accessed on 12 December 2020).
- Retscher, G.; Kealy, A.; Gikas, V.; Gabela, J.; Goel, S.; Li, Y.; Masiero, A.; Toth, C.K.; Perakis, H.; Błaszczak-Bąk, W.; et al. A Benchmarking Measurement Campaign to Support Ubiquitous Localization in GNSS Denied and Indoor Environments. In International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Krämmer, A.; Schöller, C.; Gulati, D.; Knoll, A. Providentia—A large scale sensing system for the assistance of autonomous vehicles. arXiv 2019, arXiv:1906.06789. [Google Scholar]
- Shan, M.; Narula, K.; Wong, R.; Worrall, S.; Khan, M.; Alexander, P.; Nebot, E. Demonstrations of cooperative perception: Safety and robustness in connected and automated vehicle operations. arXiv 2020, arXiv:2011.08581. [Google Scholar]
- Blanco, J.L.; Moreno, F.A.; Gonzalez, J. A collection of outdoor robotic datasets with centimeter-accuracy ground truth. Auton. Robot. 2009, 27, 327–351. [Google Scholar] [CrossRef]
- Mao, H.; Luo, W.; Tan, H.; Ni, L.M.; Xiao, N. Exploration of ground truth from raw GPS data. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining; ACM Press: New York, NY, USA, 2012; Volume 12, pp. 118–125. [Google Scholar] [CrossRef] [Green Version]
- Bonte, D.; Hodgson, J. The Future of Maps: Technologies, Processes, and Ecosystem; Technical Report; ABI Research and HERE Technologies: Oyster Bay, NY, USA, 2018. [Google Scholar]
- Sedaaghi, M.H.; Daj, R.; Khosravi, M. Mediated morphological filters. In Proceedings of the 2001 International Conference on Image Processing (Cat. No.01CH37205), Thessaloniki, Greece, 7–10 October 2001; Volume 3, pp. 692–695. [Google Scholar] [CrossRef]
- Wang, Z.; Liao, X.; Zhao, X.; Han, K.; Tiwari, P.; Barth, M.J.; Wu, G. A Digital Twin Paradigm: Vehicle-to-Cloud Based Advanced Driver Assistance Systems. In Proceedings of the IEEE Vehicular Technology Conference, Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Jimenez, V.J.E.; Schwarzl, C.; Jósvai, S. Radar evaluation through a mobile robot platform at the ZalaZONE proving ground. In Proceedings of the 5th International Conference on Robotics and Automation Engineering, Singapore, 20–22 November 2020; pp. 1–6. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Sakurada, K.; Kawaguchi, N. Reflectance Intensity Assisted Automatic and Accurate Extrinsic Calibration of 3D LiDAR and Panoramic Camera Using a Printed Chessboard. Remote. Sens. 2017, 9, 851. [Google Scholar] [CrossRef] [Green Version]
- Németh, H.; Tihanyi, V.; Dános, L.; Szappanos, A.; Horváth, C. Control System for Autonomous Driving of a Vehicle. European Patent Application EP 3 627 187, 18 September 2018. [Google Scholar]
- Muckenhuber, S.; Holzer, H.; Rübsam, J.; Stettinger, G. Object-based sensor model for virtual testing of ADAS/AD functions. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Schlager, B.; Muckenhuber, S.; Schmidt, S.; Holzer, H.; Rott, R.; Maier, F.M.; Saad, K.; Kirchengast, M.; Stettinger, G.; Watzenig, D.; et al. State-of-the-Art Sensor Models for Virtual Testing of Advanced Driver Assistance Systems/Autonomous Driving Functions. SAE Int. J. Connect. Autom. Veh. 2020, 3, 233–261. [Google Scholar] [CrossRef]
- Holder, M.; Rosenberger, P.; Winner, H.; D’hondt, T.; Makkapati, V.; Maier, F.; Schreiber, H.; Magosi, Z.; Slavik, Z.; Bringmann, O.; et al. Measurements revealing Challenges in Radar Sensor Modeling for Virtual Validation of Autonomous Driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2616–2622. [Google Scholar] [CrossRef] [Green Version]
- Bernsteiner, S.; Holl, R.; Lindvai-Soos, D.; Eichberger, A. Subjective Evaluation of Advanced Driver Assistance by Evaluation of Standardized Driving Maneuvers. In Proceedings of the SAE 2013 World Congress, Detroit, MI, USA, 16–18 April 2013; pp. 1–11. [Google Scholar] [CrossRef]
- Eichberger, A.; Markovic, G.; Magosi, Z.; Rogic, B.; Lex, C.; Samiee, S. A Car2X Sensor Model for Virtual Development of Automated Driving. Int. J. Adv. Robot. Syst. 2017. [Google Scholar] [CrossRef] [Green Version]
- Höber, M.; Nalic, D.; Eichberger, A.; Samiee, S.; Magosi, Z.; Payerl, C. Phenomenological Modelling of Lane Detection Sensors for Validating Performance of Lane Keeping Assist Systems. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 899–905. [Google Scholar] [CrossRef]
- Forrest, M.M.; Chen, Z.; Hassan, S.; Raymond, I.O.; Alinani, K. Cost Effective Surface Disruption Detection System for Paved and Unpaved Roads. IEEE Access 2018, 6, 48634–48644. [Google Scholar] [CrossRef]
- Tudón-Martínez, J.C.; Fergani, S.; Sename, O.; Martinez, J.J.; Morales-Menendez, R.; Dugard, L. Adaptive Road Profile Estimation in Semiactive Car Suspensions. IEEE Trans. Control. Syst. Technol. 2015, 23, 2293–2305. [Google Scholar] [CrossRef] [Green Version]
- 3GPP. Service Requirements for Cyber-Physical Control Applications in Vertical Domains; TS 22.104 v17.2.0, 3rd Generation Partnership Project; 3GPP: Valbonne, France, 2019. [Google Scholar]
- 3GPP. System Architecture for the 5G System (5GS); Stage 2; TS 23.501 v15.8.0, 3rd Generation Partnership Project; 3GPP: Valbonne, France, 2019. [Google Scholar]
- 3GPP. System Architecture for the 5G System (5GS); TS 23.501 Version 15.2.0 Release 15; 3GPP: Valbonne, France, 2018. [Google Scholar]
- Soós, G.; Ficzere, D.; Varga, P. Towards Traffic Identification and Modeling for 5G Application Use-Cases. Electronics 2020, 9, 640. [Google Scholar] [CrossRef]
- Taleb, T.; Mada, B.; Corici, M.; Nakao, A.; Flinck, H. PERMIT: Network Slicing for Personalized 5G Mobile Telecommunications. IEEE Commun. Mag. 2017, 55, 88–93. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BMW | Truck | |
|---|---|---|
| RMSE | 0.2631 | 0.3643 |
| MAPE | 0.0094 | 0.0070 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tihanyi, V.; Tettamanti, T.; Csonthó, M.; Eichberger, A.; Ficzere, D.; Gangel, K.; Hörmann, L.B.; Klaffenböck, M.A.; Knauder, C.; Luley, P.; et al. Motorway Measurement Campaign to Support R&D Activities in the Field of Automated Driving Technologies. Sensors 2021, 21, 2169. https://doi.org/10.3390/s21062169
Tihanyi V, Tettamanti T, Csonthó M, Eichberger A, Ficzere D, Gangel K, Hörmann LB, Klaffenböck MA, Knauder C, Luley P, et al. Motorway Measurement Campaign to Support R&D Activities in the Field of Automated Driving Technologies. Sensors. 2021; 21(6):2169. https://doi.org/10.3390/s21062169
Chicago/Turabian StyleTihanyi, Viktor, Tamás Tettamanti, Mihály Csonthó, Arno Eichberger, Dániel Ficzere, Kálmán Gangel, Leander B. Hörmann, Maria A. Klaffenböck, Christoph Knauder, Patrick Luley, and et al. 2021. "Motorway Measurement Campaign to Support R&D Activities in the Field of Automated Driving Technologies" Sensors 21, no. 6: 2169. https://doi.org/10.3390/s21062169
APA StyleTihanyi, V., Tettamanti, T., Csonthó, M., Eichberger, A., Ficzere, D., Gangel, K., Hörmann, L. B., Klaffenböck, M. A., Knauder, C., Luley, P., Magosi, Z. F., Magyar, G., Németh, H., Reckenzaun, J., Remeli, V., Rövid, A., Ruether, M., Solmaz, S., Somogyi, Z., ... Szalay, Z. (2021). Motorway Measurement Campaign to Support R&D Activities in the Field of Automated Driving Technologies. Sensors, 21(6), 2169. https://doi.org/10.3390/s21062169