
An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration


Abstract
:1. Introduction
2. Principle and Structure of the System
2.1. Structure of the Network Position System
2.2. Working Principle of the System
3. Principle of the Network Positioning Method Based on Spatial-Temporal Self-Calibration
3.1. Spatial Position Calibration of the Beacon Modem
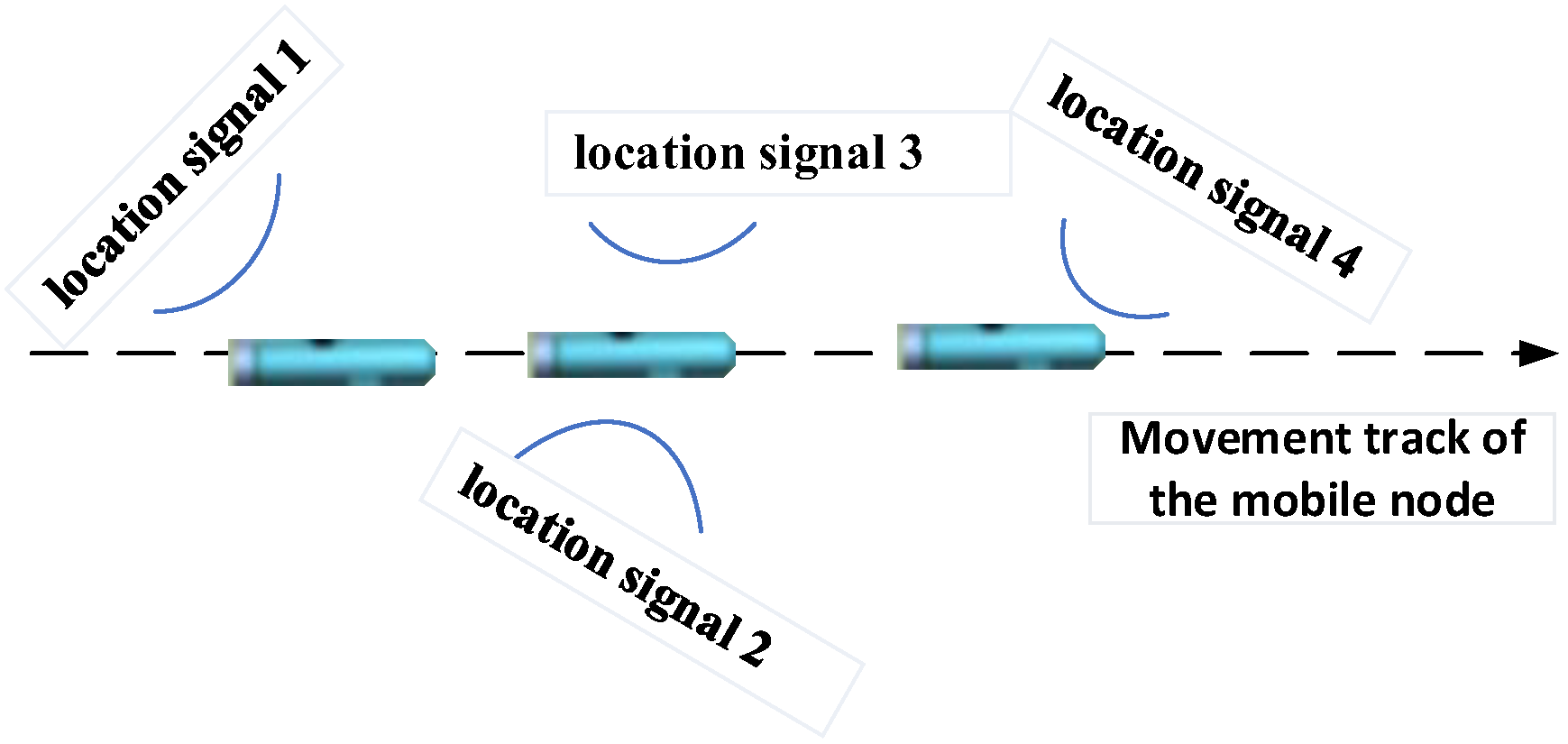
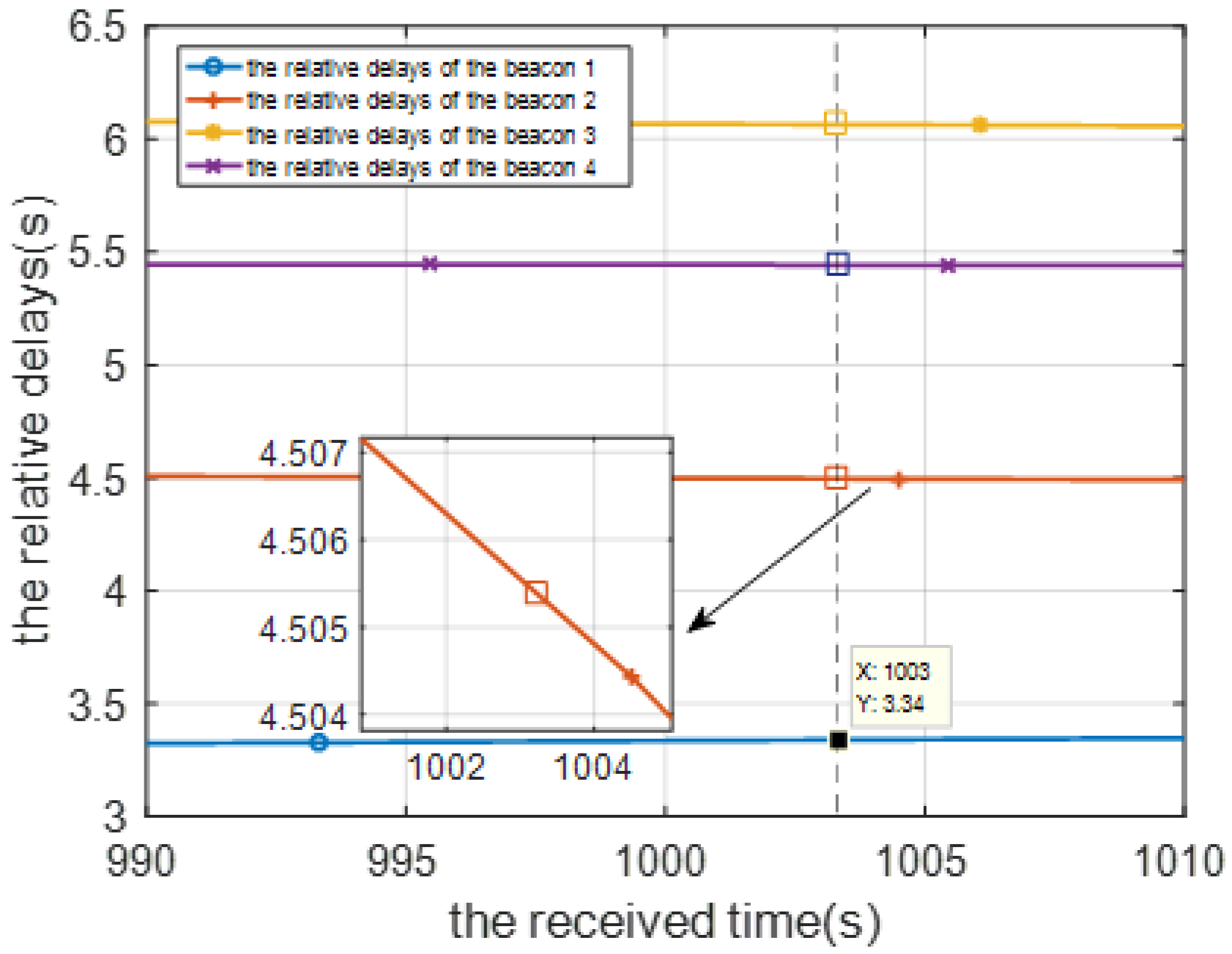
3.2. Arrival Time Calibration of the Location Signal
3.3. High-Precision Position for Mobile Node
4. Posterior Cramér–Rao Bound (PCRB)
5. Experiments and Analysis
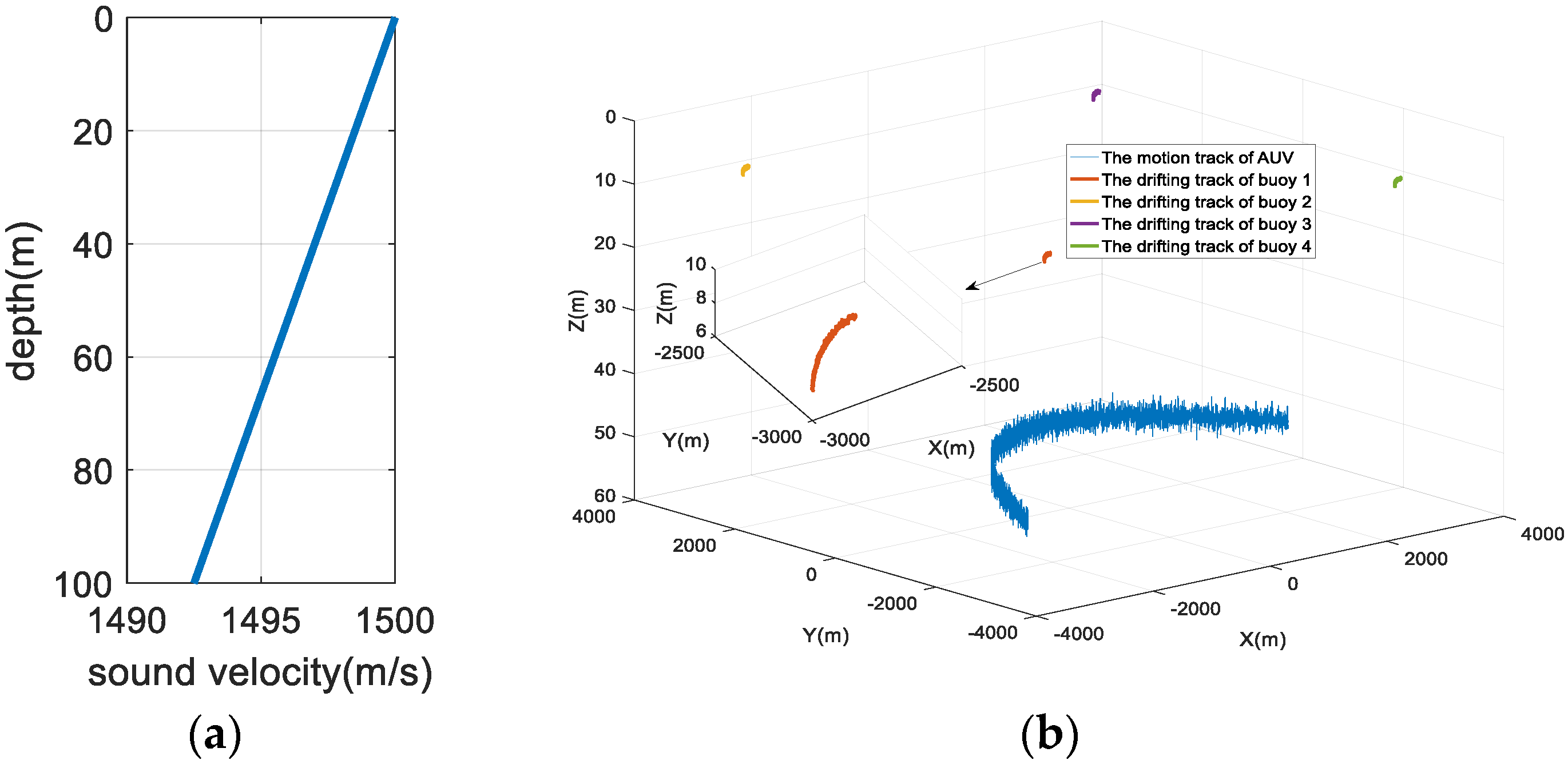
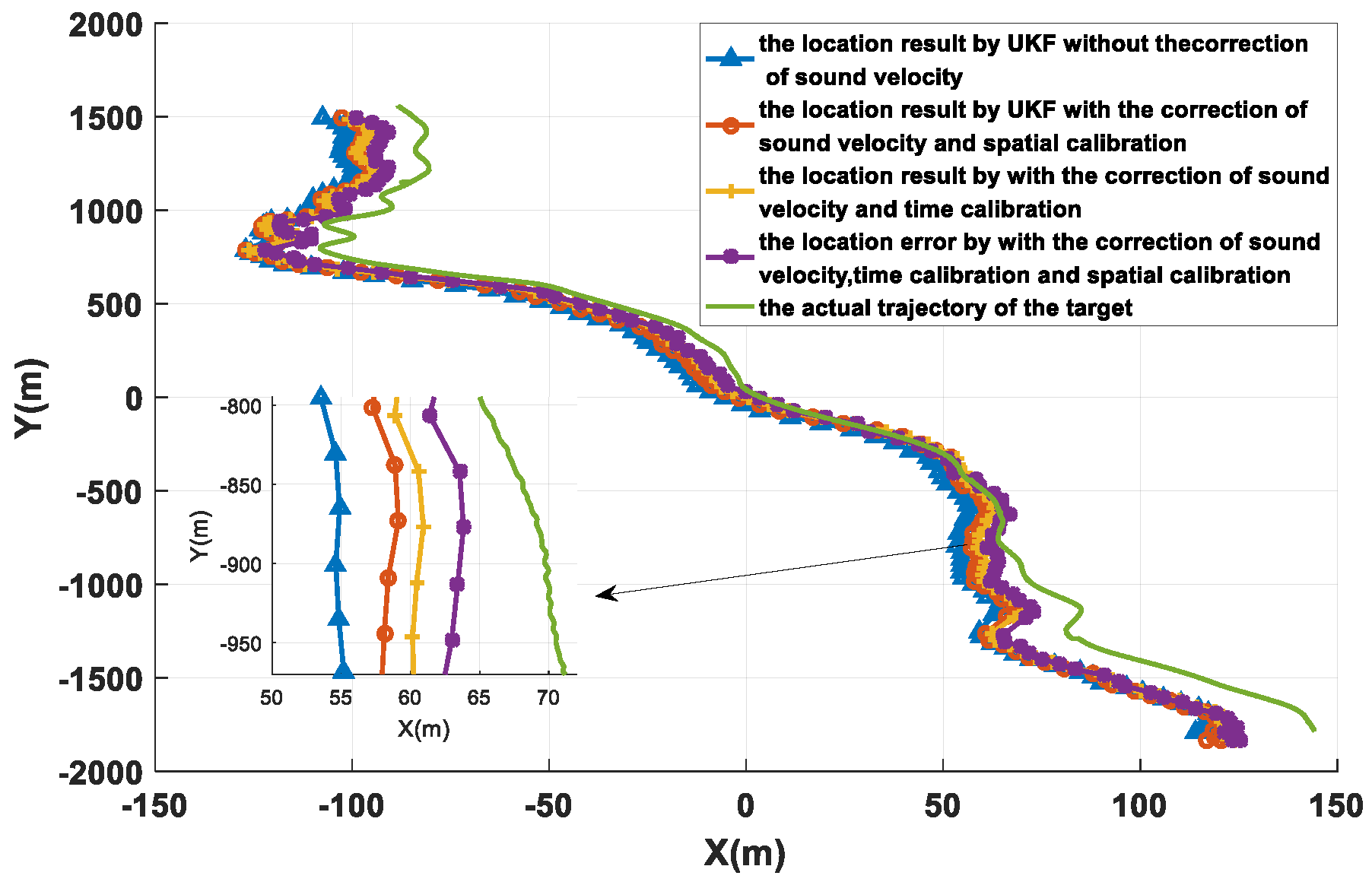
5.1. Simulation Experiments and Analysis
- (1)
- The four buoy nodes form a square topology with a side length of 6 km, and the horizontal initial positions of the four buoys are (3000, −3000 m), (−3000, −3000 m), (3000, 3000 m), (−3000, 3000 m).
- (2)
- Each buoy node is equipped with GPS equipment. The GPS equipment can obtain the horizontal position of the buoy body in real-time, and there is a Gaussian distribution error in the position information with a mean of 0 m and a variance of 1 m2.
- (3)
- The buoy body drifts with the current. The drifting directions of the four buoys are the same, but the velocities are different, and they all obey a Gaussian distribution.
- (4)
- Each buoy node is equipped with an underwater acoustic modem. The modem and the buoy body are softly connected by a cable, and the length is 10 m. The modem depth is 8 m. The drifting trajectory of the modem is the same as that of the buoy body, and the measured value of the depth sensor obeys Gaussian distribution N (8 m, 0.1 m2).
- (5)
- The movement trajectory of the AUV is a parabola. For the trajectory, its initial horizontal position is (−3000, 2675 m), the horizontal position of the inflection point is (510, 1000 m), and the horizontal position of the endpoint of movement is (3000, −875 m). The depth of the underwater mobile node obeys a Gaussian distribution N (50 m, 0.2 m2).
- (6)
- The real propagation time of the positioning signal received by the underwater mobile node is obtained through the ray propagation model, and a Gaussian distribution error is added to the time measurement result.
- (7)
- The water depth of the simulation area is 100 m and medium hydrological conditions are selected.
- (8)
- The simulation lasts 6000 s, and the positioning period is 10 s; thus, there are 600 positioning cycles in the simulation.
5.2. Sea Trial Analysis
6. Conclusions
- (1)
- The real-time position of the buoy modem is affected by current and is difficult to accurately obtain. To solve this problem, this study presented a real-time compensation method for the buoy modem position. In the presence of the modem position offset with the flow, the compensation method can accurately estimate the modem space position through the soft connection relationship between the buoy modem and the buoy body.
- (2)
- The movement of the underwater node can increase the time delay error, so this paper proposes a time delay calculation method. The main idea is to normalize the ranging information to the same sampling time, which can reduce the measurement delay error.
- (3)
- Under the influence of sound ray bending, the positioning error of the underwater mobile node is large. To solve this problem, a networked positioning model based on the effective sound velocity was proposed. No matter how complex the sea environment is, the positioning model can revise the sound ray in real-time and achieve the high-precision positioning of mobile nodes. Both the simulation results and experimental data verify the effectiveness of the algorithm proposed in this paper.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Su, X.; Ullah, I.; Liu, X.; Choi, D. A Review of Underwater Localization Techniques, Algorithms, and Challenges. J. Sens. 2020, 2020, 6403161. [Google Scholar] [CrossRef]
- Chang, S.; Li, Y.; He, Y.; Wang, H. Target Localization in Underwater Acoustic Sensor Networks using RSS Measurements. Appl. Sci. 2018, 8, 225. [Google Scholar] [CrossRef] [Green Version]
- Tao, X.; Yongchang, H.U.; Zhang, B.; Leus, G. RSS-Based Sensor Localization in Underwater Acoustic Sensor Networks. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016. [Google Scholar]
- Dubrovinskaya, E.; Casari, P.; Kebkal, V.; Oleksiy, K.; Konstantin, K. Underwater Localization via Wideband Direction-of-Arrival Estimation using Acoustic Arrays of Arbitrary Shape. Sensors 2020, 20, 3862. [Google Scholar] [CrossRef] [PubMed]
- Ding, W.; Chang, S.; Li, J. A Novel Weighted Localization Method in Wireless Sensor Networks based on Hybrid RSS/AoA Measurements. IEEE Access 2021, 9, 150677–150685. [Google Scholar] [CrossRef]
- Ullah, I.; Chen, J.; Su, X.; Esposito, C.; Choi, C. Localization and Detection of Targets in Underwater Wireless Sensor using Distance and Angle Based Algorithms. IEEE Access 2019, 7, 45693–45704. [Google Scholar] [CrossRef]
- Tao, Z.; Hong, S.; Li, C.; Yao, L. AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation. Sensors 2016, 16, 357–372. [Google Scholar]
- Irene, T.; Luca, I.; Petrika, G.; Chiara, P.; Stefano, B. Localizing Autonomous Underwater Vehicles: Experimental Evaluation of a Long Baseline Method. In Proceedings of the 2021 17th International Conference on Distributed Computing in Sensor Systems (DCOSS), Pafos, Cyprus, 14–16 July 2021; pp. 443–450. [Google Scholar]
- Bogomolov, V.V. Test Results of the Long Baseline Navigation Solutions under a Large a Priori Position Uncertainty. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1215, 012006–012011. [Google Scholar] [CrossRef]
- Otero, P.; Hernández-Romero, Á.; Luque-Nieto, M.Á. LBL System for Underwater Acoustic Positioning: Concept and Equations. arXiv 2022, arXiv:2204.08255. [Google Scholar]
- Zhu, Z.; Hu, S. Model and Algorithm Improvement on Single Beacon Underwater Tracking. IEEE J. Ocean. Eng. 2017, 43, 1143–1160. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Bo, X.; Wu, Z.; Chambers, J.A. A New Adaptive Extended Kalman Filter for Cooperative Localization. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 353–368. [Google Scholar] [CrossRef]
- Wang, J.; Xu, T.; Wang, Z. Adaptive Robust Unscented Kalman Filter for AUV Acoustic Navigation. Sensors 2019, 20, 60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Allotta, B.; Caiti, A.; Costanzi, R. A new AUV Navigation System Exploiting Unscented Kalman Filter. J. Ocean. Eng. 2016, 113, 121–132. [Google Scholar] [CrossRef]
- Ullah, I.; Qian, S.; Deng, Z.; Lee, J. Extended Kalman Filter-based Localization Algorithm by Edge Computing in Wireless Sensor Networks. Digit. Commun. Netw. (DCAN) 2021, 7, 187–195. [Google Scholar] [CrossRef]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A Localization based on Unscented Kalman Filter and Particle Filter Localization Algorithms. IEEE Access 2019, 8, 2233–2246. [Google Scholar] [CrossRef]
- Chen, Z.; Hu, Q.; Li, H.; Fan, R. ULES: Underwater Localization Evaluation Scheme Under Beacon Node Drift Scenes. IEEE Access 2018, 39, 70615–70624. [Google Scholar] [CrossRef]
- Ramezani, H.; Rad, H.J.; Leus, G. Target Localization and Tracking of a Mobile Target for an Isogradient Sound Speed Profile. IEEE Trans. Signal Processing 2013, 61, 1434–1446. [Google Scholar] [CrossRef]
- Zhang, J. Research of Deep Water LBL Positioning and Navigation Technology. Ph.D. Thesis, College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin, China, 2016. [Google Scholar]
- Lin, W. Research on Underwater Sound Channel Simulation and Sound Ray Revision. Master’s Thesis, College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin, China, 2009. [Google Scholar]
- Tichavski, P.; Muravchik, H.; Nehorai, A. Posterior Cramer-Rao Bounds for discrete-time Nonlinear Filtering. IEEE Trans. Signal Processing 1998, 46, 1386–1396. [Google Scholar] [CrossRef] [Green Version]
- Arienzo, L.; Longo, M. Posterior Cramer-Rao Bound for Range-based Target Tracking in Sensor Networks. In Proceedings of the IEEE Workshop on Statistical Signal Processing (SSP), Cardiff, UK, 31 August–3 September 2009; pp. 541–544. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistics | Method | RMS_x (m) | RMS_y (m) | RMS_r (m) |
|---|---|---|---|---|
| Min | GPS value | 4.44 | 3.78 | 6.03 |
| Calibration value | 0.81 | 0.75 | 1.15 | |
| Max | GPS value | 8.51 | 8.02 | 9.06 |
| Calibration value | 2.02 | 2.13 | 2.90 |
| Method | Mean (m) | Std (m) | Max (m) | Min (m) |
|---|---|---|---|---|
| Method 1 | 9.59 | 1.53 | 13.27 | 6.21 |
| Method 2 | 3.30 | 0.41 | 4.31 | 2.57 |
| Method 3 | 6.06 | 0.03 | 6.13 | 6.01 |
| Method 4 | 1.13 | 0.18 | 1.95 | 0.88 |
| Method | Mean (m) | Std (m) | Max (m) | Min (m) |
|---|---|---|---|---|
| Method 1 | 16.86 | 6.22 | 30.13 | 5.2 |
| Method 2 | 13.81 | 7.27 | 28.8 | 0.26 |
| Method 3 | 12.2 | 7.06 | 25.64 | 0.48 |
| Method 4 | 10.33 | 6.99 | 25.14 | 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Du, P.; Wang, Z.; Wang, Z. An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration. Sensors 2022, 22, 5571. https://doi.org/10.3390/s22155571
Wang C, Du P, Wang Z, Wang Z. An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration. Sensors. 2022; 22(15):5571. https://doi.org/10.3390/s22155571
Chicago/Turabian StyleWang, Chao, Pengyu Du, Zhenduo Wang, and Zhongkang Wang. 2022. "An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration" Sensors 22, no. 15: 5571. https://doi.org/10.3390/s22155571
APA StyleWang, C., Du, P., Wang, Z., & Wang, Z. (2022). An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration. Sensors, 22(15), 5571. https://doi.org/10.3390/s22155571