

Path Planning and Formation Control for UAV-Enabled Mobile Edge Computing Network

Abstract
:1. Introduction
- R1: Multi-agent systems (MAS): Multi-agent systems are computational systems composed of a large number of interacting computer elements known as agents. To take advantage of the decentralized structure of the multi-agent system, the agent must be provided with some autonomy. When we state that an agent is autonomous, we infer that it can collect data by interacting with other agents and its environment, and then make decisions based on this information.
- R2: Formation control: According to the proposed method, swarms have a certain topology, such as a rectangle, a diamond, etc. This allows the formation topology to be maintained with little data sharing and makes the controller more resilient to external disturbances.
- R3: Leader election: In centralized formations, there is often one leader of the swarm; nevertheless, if a single error happens, the entire mission is aborted. In this situation, the other agents must select a new leader.
- R4: Obstacle avoidance: In centralized formations, there is often one leader of the swarm; nevertheless, if a single error happens, the entire mission is aborted. In this situation, the other agents must select a new leader.
2. Preliminaries
2.1. Mec Architectures
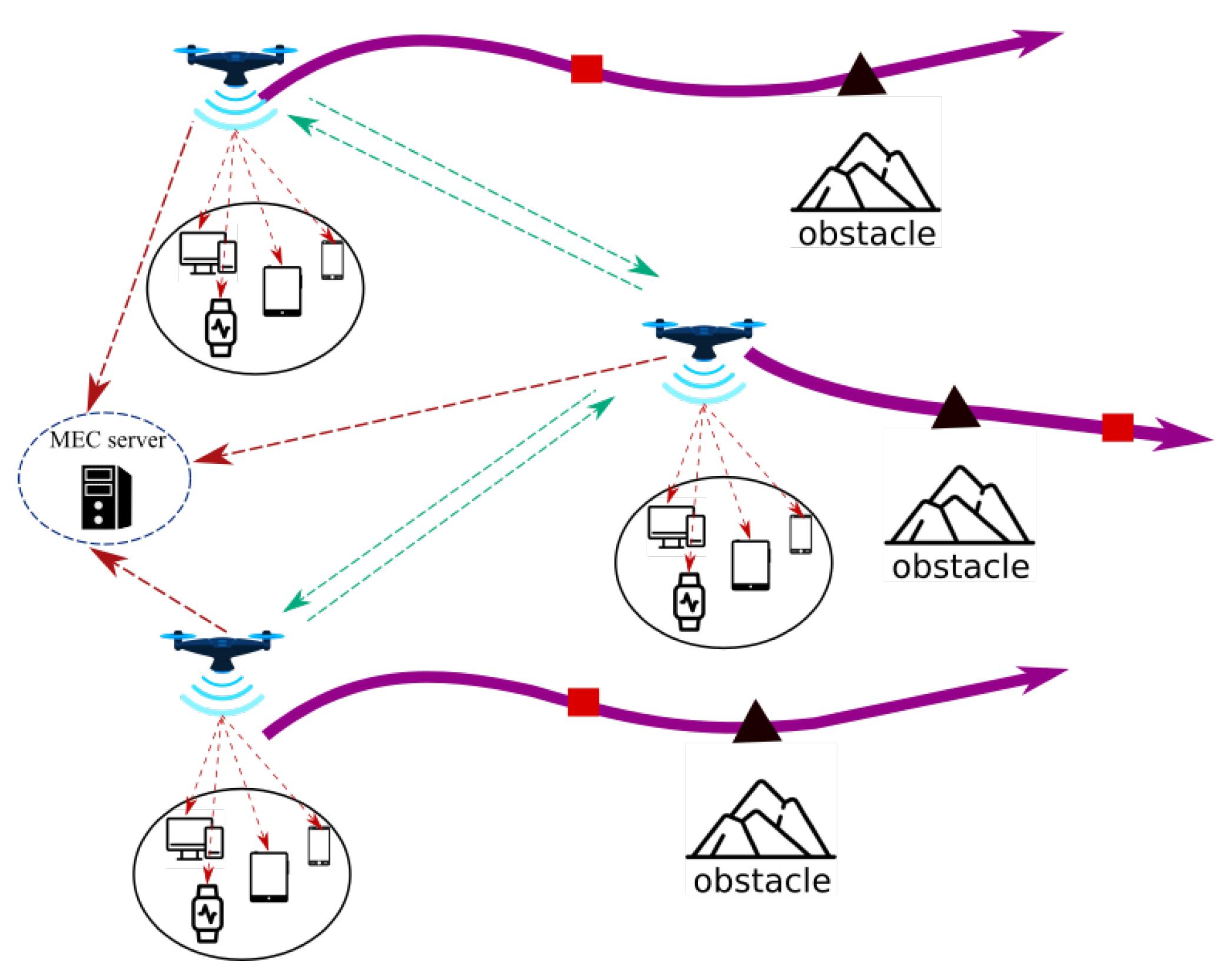
- Assisted MEC: This architecture is often used to provide services following a natural disaster or bombardment-related infrastructure damage. As depicted in Figure 1, the UAV assists mobile users by acting as an aerial MEC server-enabled base station. Each user transfers its computationally intensive activities to one or many UAVs for processing. Therefore, UAVs with long-lasting batteries and powerful CPUs are necessary for this architecture. In addition, this architecture is typically employed to satisfy QoS requirements by optimizing the overall energy consumed by the MUs.
- Cellular-Connected MEC:Figure 2 illustrates these kind of architectures. During a mission, UAVs are viewed as aerial users with computationally intensive tasks, such as path planning and data analysis. Due to limited onboard processing capability, UAVs offload computation to an MEC server on a Ground Base Station (GBSs). In comparison to the previous architecture, the UAVs deployed in this manner have limited batteries and possessors, but they must conduct intense computation tasks.
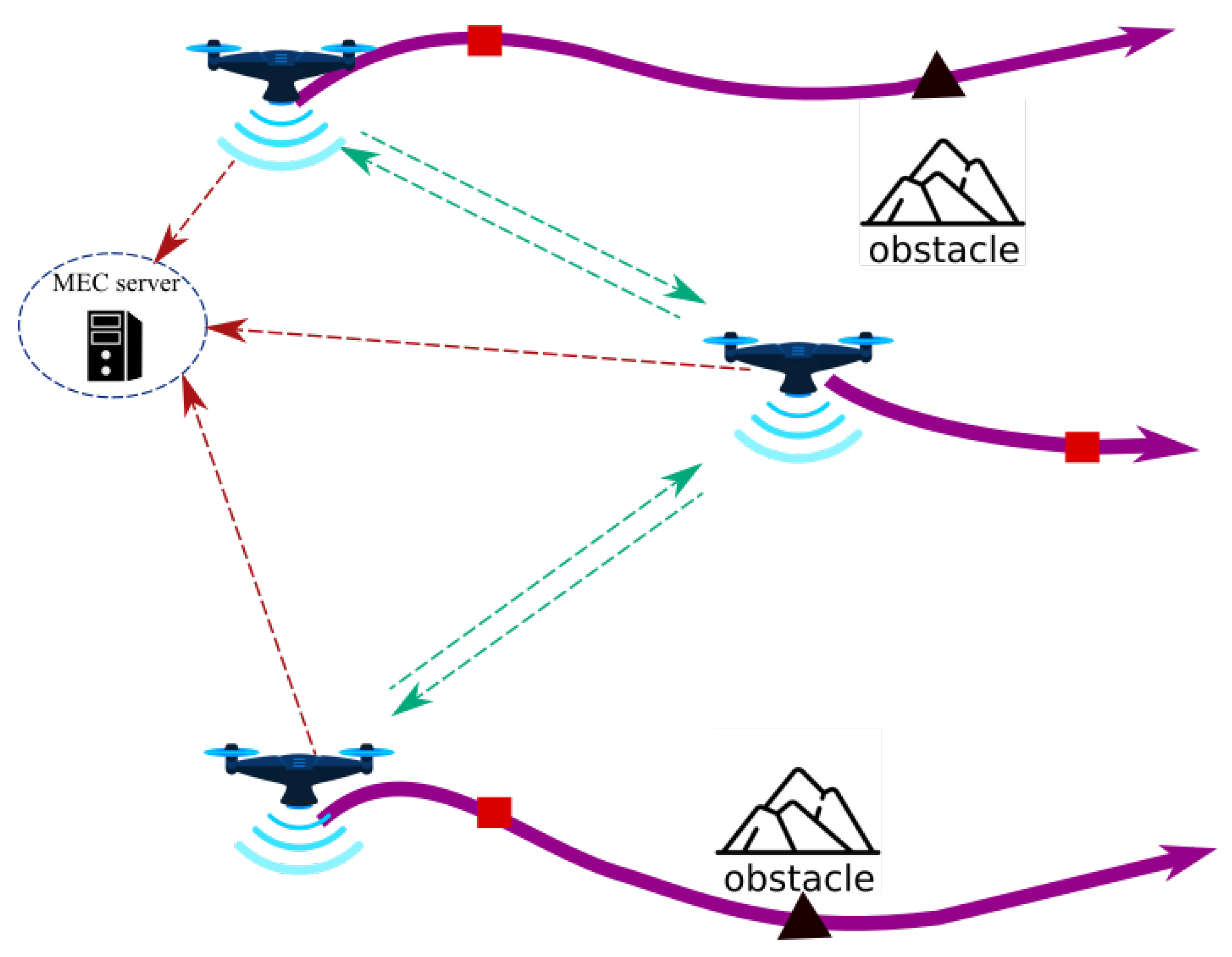
- Relayed MEC: As shown in Figure 3, the UAVs in this final architecture serve as relays to help the MUs in offloading their intensive computation tasks to the MEC server of the GBSs. Therefore, none of the UAVs include an MEC server. This architecture is intended to enable long-distance communication links between the MUs and the MEC server in the event that other regular links are interrupted.
2.2. System Presentation
2.3. Graph Theory
3. Path Planning Stage
4. Formation Control Stage
4.1. UAV Model
4.2. Formation Control
4.3. Formation Transformation
| Algorithm 1 Leader Election |
N: Number of agents, A: list of N agents where each one has an from 1 to N, , , : list of N topology according to the agent’s number, : list of N paths according to each topology.
|
5. Simulation Results
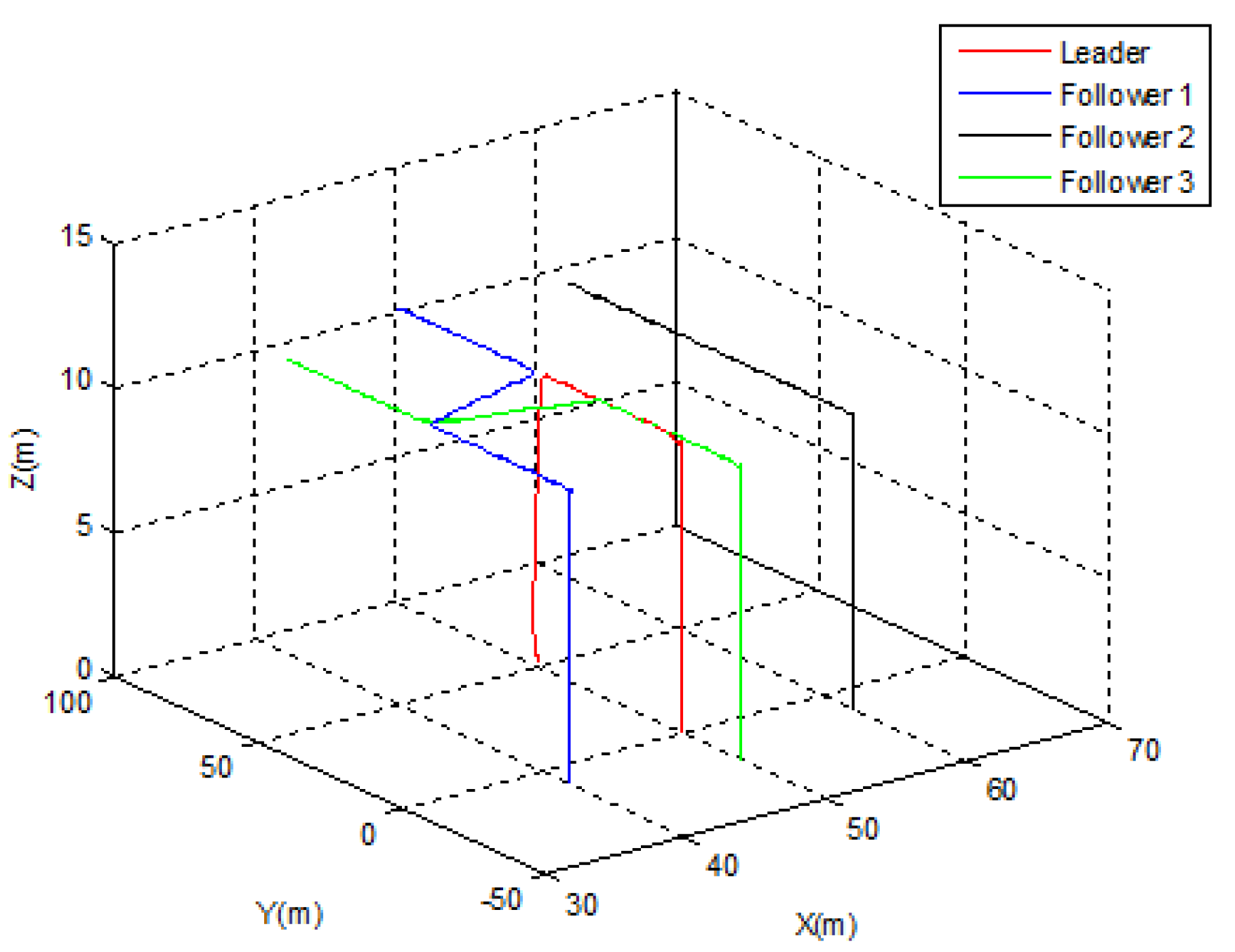
- Scenario 1: In this scenario, UAVs are deployed as fixed-position stationary nodes that serve as communication relays. Four UAVs under rectangular topology take off from various points and fly to a predetermined altitude. The goal is to keep the optimal fixed position for maximum network connectivity.
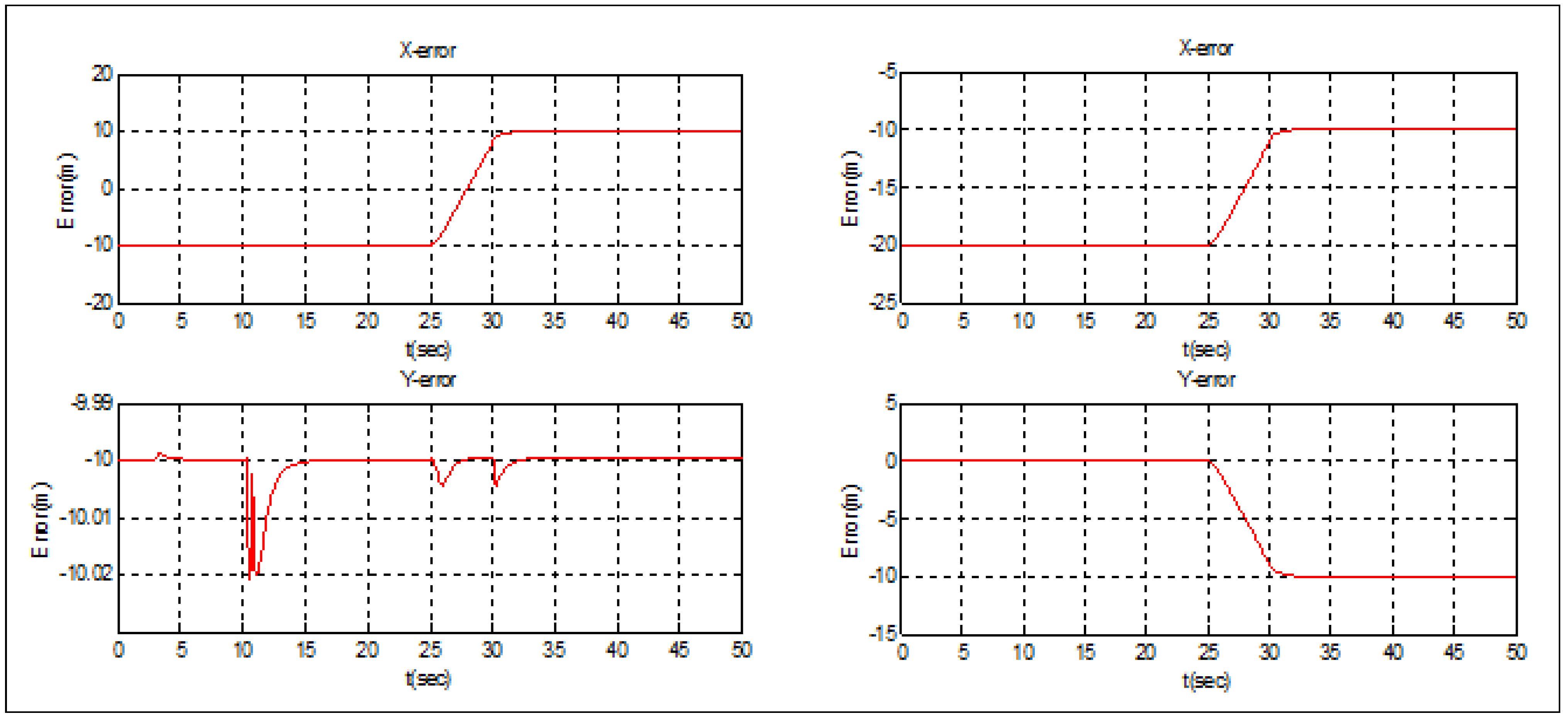
- Scenario 2: The mission to be executed during this scenario is that every UAV acts as an aerial MEC server. Nonetheless, one of the swarm agents has an unanticipated engine failure. The remaining UAVs must address this situation. Leader selection and topology switching are implemented.
- Scenario 3: The third scenario simulates the UAVs as mobile nodes in a Cellular-Connected MEC. Each UAV is designed to follow a desired path with different hovering positions to serve for IoT devices. The Swarm must travel to its intended destination while avoiding external obstacles and agents collisions.
5.1. Scenario 1: Relayed MEC
5.2. Scenario 2: Assisted MEC
5.2.1. Case 1
5.2.2. Case 2
5.2.3. Case 3
5.3. Scenario 3: Cellular-Connected MEC
5.4. Comparative Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abrar, M.; Ajmal, U.; Almohaimeed, Z.M.; Gui, X.; Akram, R.; Masroor, R. Energy efficient UAV-enabled mobile edge computing for IoT devices: A review. IEEE Access 2021, 9, 127779–127798. [Google Scholar] [CrossRef]
- Faraci, G.; Grasso, C.; Schembra, G. Fog in the clouds: UAVs to provide edge computing to IoT devices. ACM Trans. Internet Technol. TOIT 2020, 20, 1–26. [Google Scholar] [CrossRef]
- Kim, S.; Oh, H.; Suk, J.; Tsourdos, A. Coordinated trajectory planning for efficient communication relay using multiple UAVs. Control. Eng. Pract. 2014, 29, 42–49. [Google Scholar] [CrossRef]
- Rahbari, D.; Mahtab Alam, M.; Le Moullec, Y.; Jenihhin, M. Edge-to-Fog Collaborative Computing in a Swarm of Drones. In International Conference on Model and Data Engineering; Springer: Berlin/Heidelberg, Germany, 2021; pp. 78–87. [Google Scholar]
- Wang, Y.; Fang, W.; Ding, Y.; Xiong, N. Computation offloading optimization for UAV-assisted mobile edge computing: A deep deterministic policy gradient approach. Wirel. Netw. 2021, 27, 2991–3006. [Google Scholar] [CrossRef]
- Chang, H.; Chen, Y.; Zhang, B.; Doermann, D. Multi-UAV mobile edge computing and path planning platform based on reinforcement learning. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 6, 489–498. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J. UAV-enhanced intelligent offloading for Internet of Things at the edge. IEEE Trans. Ind. Inform. 2019, 16, 2737–2746. [Google Scholar] [CrossRef]
- Peng, C.; Huang, X.; Wu, Y.; Kang, J. Constrained Multi-Objective Optimization for UAV-Enabled Mobile Edge Computing: Offloading Optimization and Path Planning. IEEE Wirel. Commun. Lett. 2022, 11, 861–865. [Google Scholar] [CrossRef]
- Tropea, M.; De Rango, F.; Nevigato, N.; Bitonti, L.; Pupo, F. Scare: A novel switching and collision avoidance process for connected vehicles using virtualization and edge computing paradigm. Sensors 2021, 21, 3638. [Google Scholar] [CrossRef]
- Gong, C.; Wei, L.; Gong, D.; Li, T.; Feng, F. Energy-Efficient Task Migration and Path Planning in UAV-Enabled Mobile Edge Computing System. Complexity 2022, 2022. [Google Scholar] [CrossRef]
- Song, K.T.; Sun, Y.X. Coordinating multiple mobile robots for obstacle avoidance using cloud computing. Asian J. Control. 2021, 23, 1225–1236. [Google Scholar] [CrossRef]
- Miao, Y.; Hwang, K.; Wu, D.; Hao, Y.; Chen, M. Drone Swarm Path Planning for Mobile Edge Computing in Industrial Internet of Things. IEEE Trans. Ind. Inform. 2022, 1–11. [Google Scholar] [CrossRef]
- Jiang, C.; Fang, Y.; Zhao, P.; Panneerselvam, J. Intelligent uav identity authentication and safety supervision based on behavior modeling and prediction. IEEE Trans. Ind. Inform. 2020, 16, 6652–6662. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, S.; Lei, L. A Multi-UAV Formation Maintaining Method Based on Formation Reference Point. J. Phys. Conf. Ser. 2020, 1621, 012014. [Google Scholar] [CrossRef]
- He, Y.; Liu, J.; Tong, E.; Niu, W.; Huang, X.; Zhou, Y.; Li, C.; Chang, L. Adapt Swarm Path Planning for UAV Based on Artificial Potential Field with Birds Intelligence Extensions. In International Symposium on Security and Privacy in Social Networks and Big Data; Springer: Berlin/Heidelberg, Germany, 2020; pp. 340–354. [Google Scholar]
- Liu, H.; Lyu, Y.; Zhao, W. Robust visual servoing formation tracking control for quadrotor UAV team. Aerosp. Sci. Technol. 2020, 106, 106061. [Google Scholar] [CrossRef]
- Parrany, A.M.; Alasty, A. Decentralized aggregation and leader-following control of a swarm of quadcopters with nonlinear under-actuated dynamics. Aerosp. Sci. Technol. 2020, 107, 106317. [Google Scholar] [CrossRef]
- Ai, X.; Yu, J. Flatness-based finite-time leader–follower formation control of multiple quadrotors with external disturbances. Aerosp. Sci. Technol. 2019, 92, 20–33. [Google Scholar] [CrossRef]
- Brust, M.R.; Strimbu, B.M. A networked swarm model for UAV deployment in the assessment of forest environments. In Proceedings of the 2015 IEEE Tenth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Singapore, 7–9 April 2015; pp. 1–6. [Google Scholar]
- Shames, I.; Teixeira, A.; Sandberg, H.; Johansson, K.H. Distributed leader selection without direct inter-agent communication. In Proceedings of the 2nd IFAC Workshop on Distributed Estimation and Control in Networked Systems, NecSys’ 10, Annecy, France, 13–14 September 2010; pp. 221–226. [Google Scholar]
- Franchi, A.; Giordano, P.R. Online leader selection for improved collective tracking and formation maintenance. IEEE Trans. Control. Netw. Syst. 2018, 5, 3–13. [Google Scholar] [CrossRef]
- CHOUTRI, K.; LAGHA, M.; DALA, L.; LIPATOV, M. Quadrotors UAVs Swarming Control Under Leader-Followers Formation. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018; pp. 794–799. [Google Scholar]
- Xu, M.; Fang, Y.; Li, J.; Zhao, X. Chattering Free Distributed Consensus Control for Attitude Tracking of Spacecraft Formation System with Unmeasurable Angular Velocity. Int. J. Control. Autom. Syst. 2020, 18, 2277–2288. [Google Scholar] [CrossRef]
- Hou, Z. Modeling and formation controller design for multi-quadrotor systems with leader-follower configuration. Ph.D. Thesis, Université de Technologie de Compiègne, Compiègne, France, 2016. [Google Scholar]
- Stojkovi, I. Formation Control of Robotized Aerial Vehicles Based on Consensus-Based Algorithms. FME Trans. 2017, 45, 559–564. [Google Scholar] [CrossRef]
- Choutri, K.; Lagha, M.; Dala, L. Multi-layered optimal navigation system for quadrotor UAV. Aircr. Eng. Aerosp. Technol. 2019, 92, 145–155. [Google Scholar] [CrossRef]
- Pham, H.; Smolka, S.A.; Stoller, S.D.; Phan, D.; Yang, J. A survey on unmanned aerial vehicle collision avoidance systems. arXiv Preprint 2015, arXiv:1508.07723. [Google Scholar]
- Lao, M.; Tang, J. Cooperative Multi-UAV Collision Avoidance Based on Distributed Dynamic Optimization and Causal Analysis. Appl. Sci. 2017, 7, 83. [Google Scholar] [CrossRef]
- Misir, O.; Gökrem, L. Flocking-Based Self-Organized Aggregation Behavior Method for Swarm Robotics. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 1427–1444. [Google Scholar] [CrossRef]
- Dang, A.D.; La, H.M.; Nguyen, T.; Horn, J. Distributed Formation Control for Autonomous Robots in Dynamic Environments. CoRR 2017, arXiv:1705.02017. [Google Scholar]
- Singh, Y.; Bibuli, M.; Zereik, E.; Sharma, S.; Khan, A.; Sutton, R. A novel double layered hybrid multi-robot framework for guidance and navigation of unmanned surface vehicles in a practical maritime environment. J. Mar. Sci. Eng. 2020, 8, 624. [Google Scholar] [CrossRef]
- Di Lillo, P.; Pierri, F.; Antonelli, G.; Caccavale, F.; Ollero, A. A framework for set-based kinematic control of multi-robot systems. Control. Eng. Pract. 2021, 106, 104669. [Google Scholar] [CrossRef]
- Liu, T.; Han, D.; Lin, Y.; Liu, K. Distributed multi-UAV trajectory optimization over directed networks. J. Frankl. Inst. 2021, 358, 5470–5487. [Google Scholar] [CrossRef]
- de Freitas, E.P.; Basso, M.; da Silva, A.A.S.; Vizzotto, M.R.; Corrêa, M.S.C. A Distributed Task Allocation Protocol for Cooperative Multi-UAV Search and Rescue Systems. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 909–917. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MEC Architecture | Relayed | Assisted | Cellular-Connected |
|---|---|---|---|
| Convergence time (s) | 10 | 50 | 120 |
| Traveled distance (m) | 10 | 70 | 80 |
| Total energy consumption (%) | 5 | 15 | 20 |
| Author | Wu et al. (2020) | Wen et al. (2019) | Tran et al. (2021) | Proposed Framework | |
|---|---|---|---|---|---|
| Formation | Centralized | Decentralized | Distributed | Distributed | |
| Vehicle | Type | UAV | UGV | UAV/UGV | UAV |
| Number | 8 | 4 | 3 | 4 | |
| Path planning | PSO | APF | NI | CO | |
| Formation control | Strategy | Position consensus | Position consensus | Velocity consensus | Attitude consensus |
| Controller | MPC | Robuste H ∞ | NI | SMC | |
| Safety precautions | N/C | Switching | Switching | Switching/Leader election | |
| Author | Wu et al. (2020) | Wen et al. (2019) | Tran et al. (2021) | Proposed Framework | |
|---|---|---|---|---|---|
| Rise time (s) | 5 | 3 | 5 | 4 | |
| Over shoot % | 0 | 0 | 5 | 0 | |
| Setting time (s) | 10 | 5 | 10 | 5 | |
| Switching time (s) | N/C | 4 | 5 | 1 | |
| Tracking error (m) | x | N/A | 0.3 | 0.1 | 0.05 |
| y | N/A | 0.3 | 0.1 | 0.05 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choutri, K.; Lagha, M.; Meshoul, S.; Fadloun, S. Path Planning and Formation Control for UAV-Enabled Mobile Edge Computing Network. Sensors 2022, 22, 7243. https://doi.org/10.3390/s22197243
Choutri K, Lagha M, Meshoul S, Fadloun S. Path Planning and Formation Control for UAV-Enabled Mobile Edge Computing Network. Sensors. 2022; 22(19):7243. https://doi.org/10.3390/s22197243
Chicago/Turabian StyleChoutri, Kheireddine, Mohand Lagha, Souham Meshoul, and Samiha Fadloun. 2022. "Path Planning and Formation Control for UAV-Enabled Mobile Edge Computing Network" Sensors 22, no. 19: 7243. https://doi.org/10.3390/s22197243
APA StyleChoutri, K., Lagha, M., Meshoul, S., & Fadloun, S. (2022). Path Planning and Formation Control for UAV-Enabled Mobile Edge Computing Network. Sensors, 22(19), 7243. https://doi.org/10.3390/s22197243