
A Constrained Kalman Filter for Wi-Fi-Based Indoor Localization with Flexible Space Organization


Abstract
:1. Introduction
1.1. Related Work
1.2. Contribution
1.3. Outline
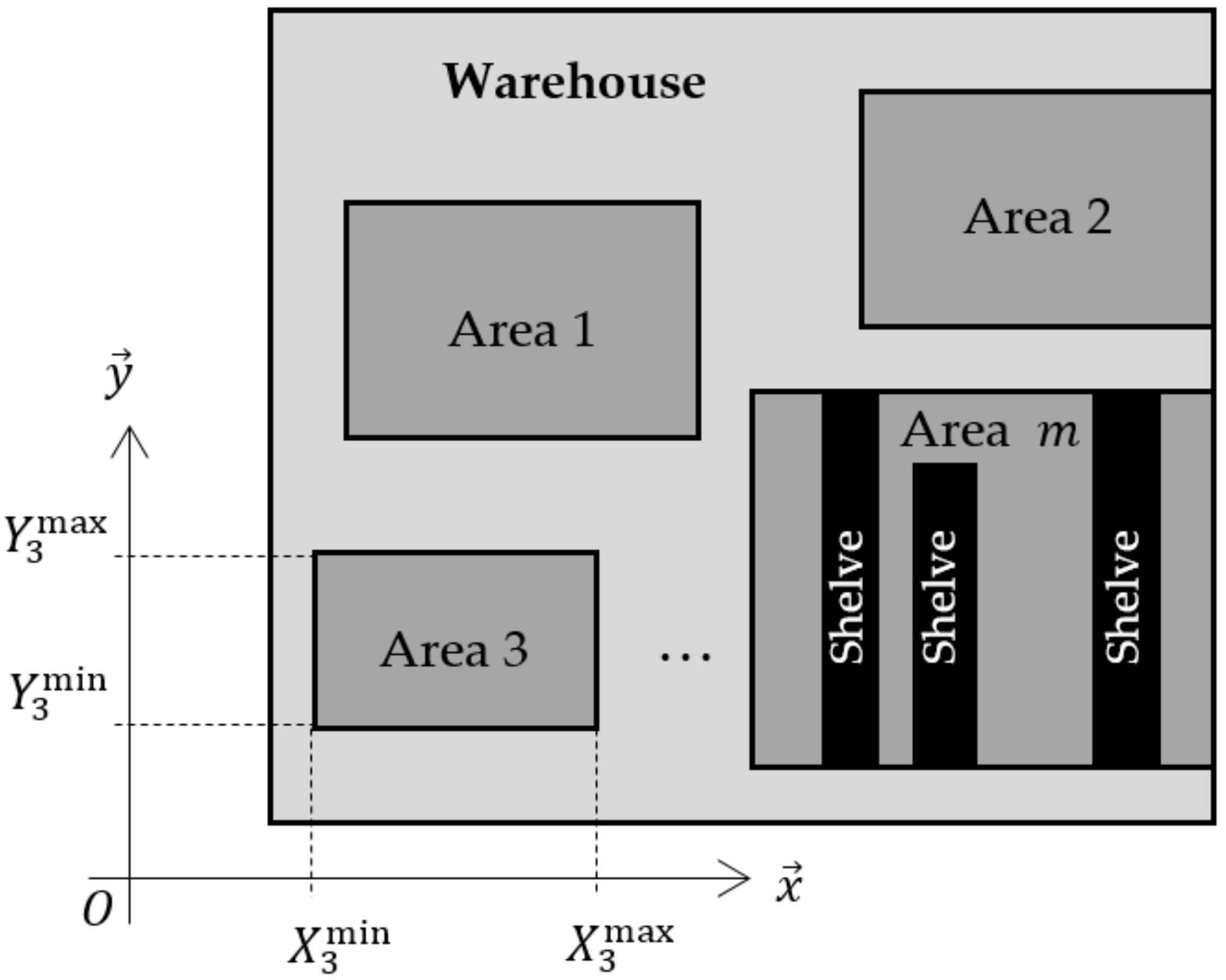
2. Problem Statement
3. Proposed Approach
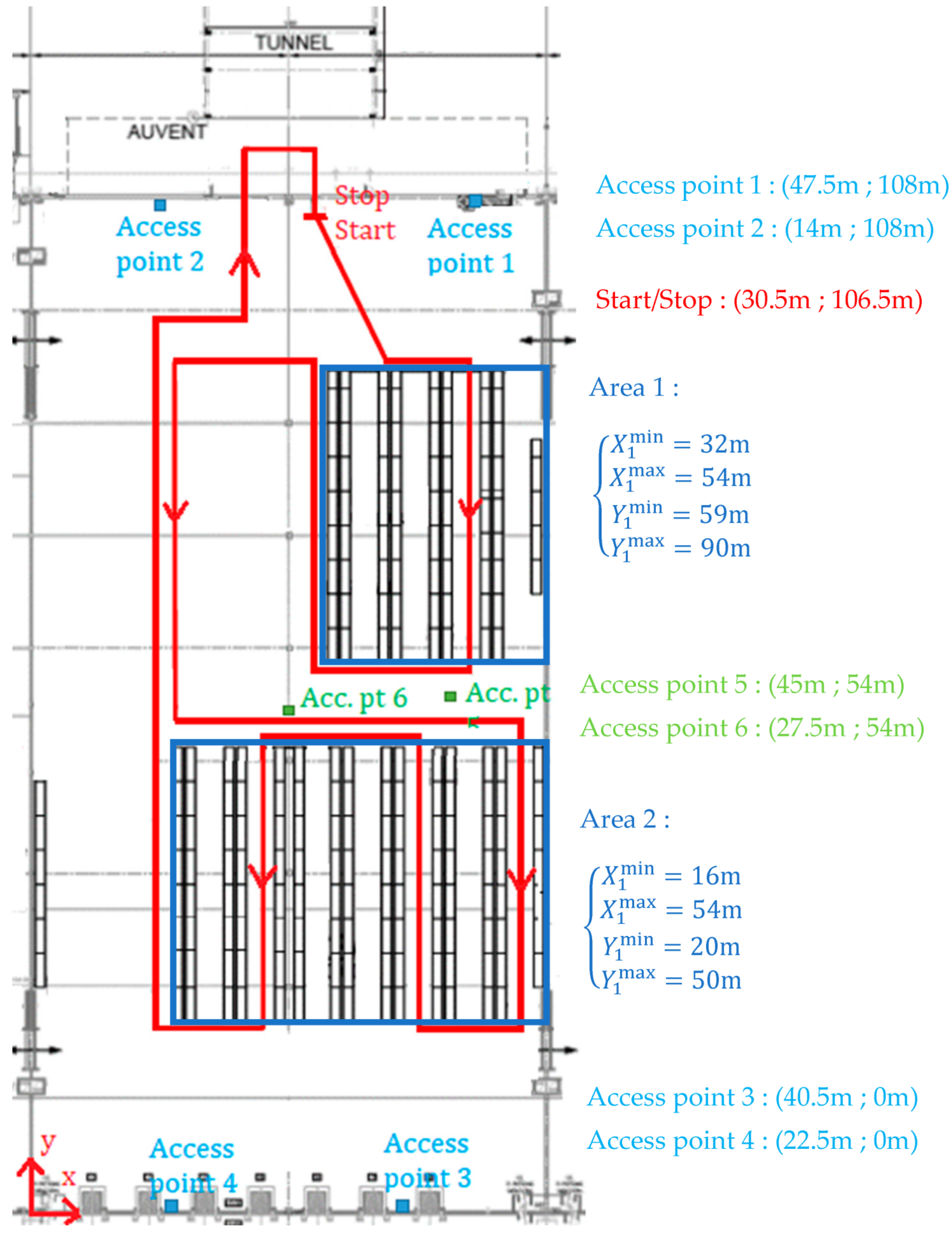
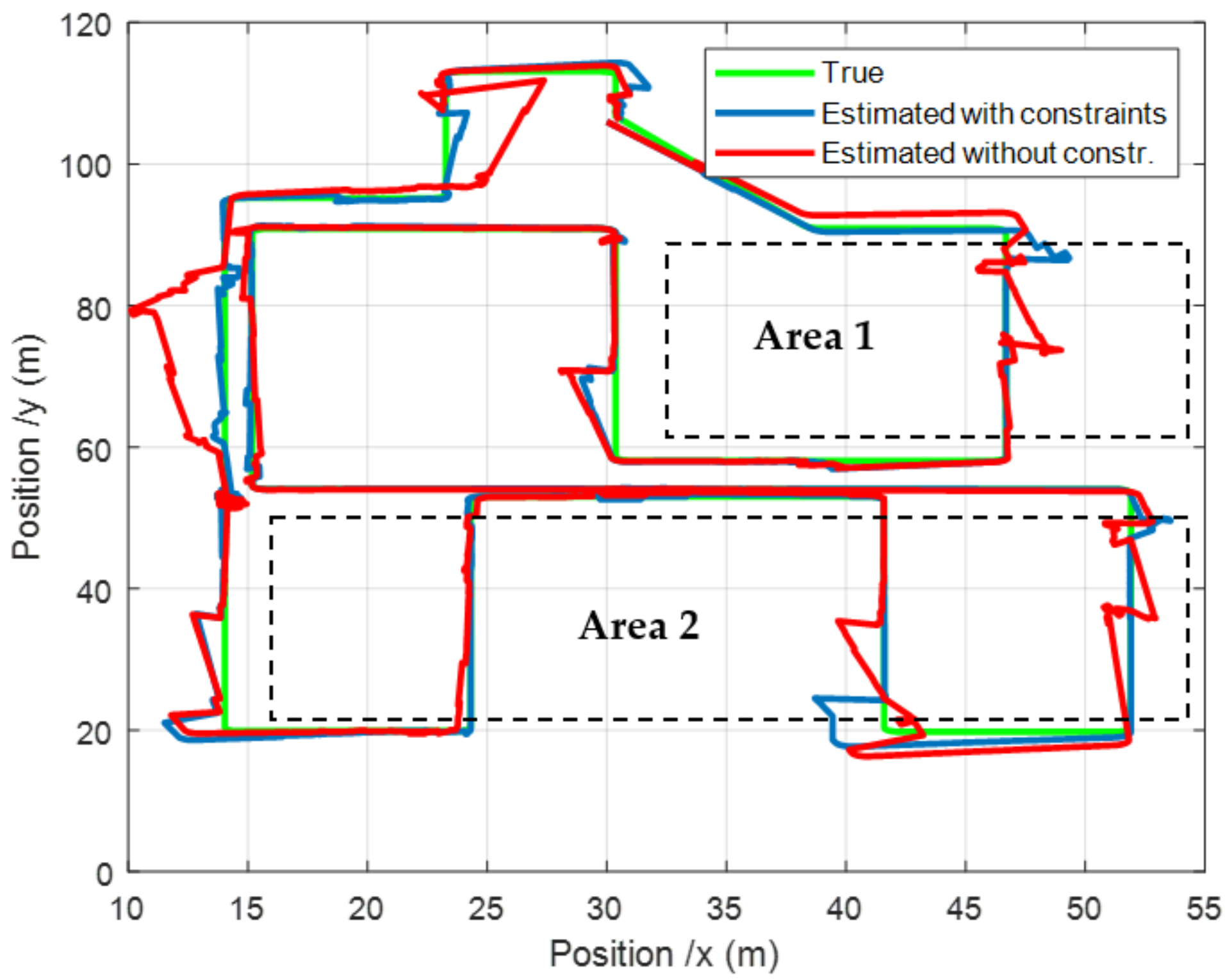
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Z.; Zhao, L.; Qin, C.; Wang, Y. Wi-Fi/PDR integrated navigation with robustly constrained Kalman filter. Meas. Sci. Technol. 2020, 31, 84002. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies; Habilitation Thesis; ETH Zurich: Zürich, Switzerland, 2012. [Google Scholar]
- Syberfeldt, A.; Ayani, M.; Holm, M.; Wang, L.; Lindgren-Brewster, R. Localizing operators in the smart factory: A review of existing techniques and systems. In Proceedings of the International Symposium on Flexible Automation (ISFA), Cleveland, OH, USA, 1–3 August 2016; pp. 179–185. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Farid, Z.; Nordin, R.; Ismail, M. Recent advances in wireless indoor localization techniques and system. J. Comput. Netw. Commun. 2013, 2013, 185138. [Google Scholar] [CrossRef]
- Basri, C.; El Khadimi, A. Survey on indoor localization system and recent advances of Wi-Fi fingerprinting technique. In Proceedings of the 5th International Conference on Multimedia Computing and Systems, Marrakech, Morocco, 29 September–1 October 2016; pp. 253–259. [Google Scholar]
- Aly, H.; Youssef, M. New insights into WiFi-based device-free localization. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, Zurich, Switzerland, 8–12 September 2013; pp. 541–548. [Google Scholar]
- Tian, Z.; Wang, Z.; Li, Z.; Zhou, M. RTIL: A Real-Time Indoor Localization System by Using Angle of Arrival of Commodity WiFi Signal. In Proceedings of the 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-based fingerprinting for indoor localization and tracking. IEEE Trans. Ind. Electron. 2015, 63, 2424–2433. [Google Scholar] [CrossRef]
- Xiong, J.; Jamieson, K. Arraytrack: A fine-grained indoor location system. In Proceedings of the 10th {USENIX} Symposium on Networked Systems Design and Implementation ({NSDI}, Lombard, IL, USA, 2–5 April 2013; pp. 71–84. [Google Scholar]
- Xu, W.; Liu, L.; Zlatanova, S.; Penard, W.; Xiong, Q. A pedestrian tracking algorithm using grid-based indoor model. Autom. Constr. 2018, 92, 173–187. [Google Scholar] [CrossRef]
- Yu, J.; Na, Z.; Liu, X.; Deng, Z. Wi-Fi/PDR-integrated indoor localization using unconstrained smartphones. EURASIP J. Wirel. Commun. Netw. 2019, 41. [Google Scholar] [CrossRef]
- Zhang, H.; Xia, Y.; Liu, K.; Jin, F.; Chen, C.; Liao, Y. A Kalman Filter Based Indoor Tracking System via Joint Wi-Fi/PDR Localization. In Proceedings of the IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018; pp. 1444–1449. [Google Scholar]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of Wi-Fi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef]
- Zhan, M.; Xi, Z.H. Indoor Location Method of Wi-Fi/PDR Fusion Based on Extended Kalman Filter Fusion. J. Phys. Conf. Ser. 2020, 1601, 042004. [Google Scholar]
- Wang, J.; Hu, A.; Li, X.; Wang, Y. An improved PDR/magnetometer/floor map integration algorithm for ubiquitous positioning using the adaptive unscented Kalman filter. ISPRS Int. J. Geo-Inf. 2015, 4, 2638–2659. [Google Scholar] [CrossRef] [Green Version]
- Xujian, H.; Hao, W. Wi-Fi indoor positioning algorithm based on improved Kalman filtering. In Proceedings of the International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Changsha, China, 17–18 December 2016; pp. 349–352. [Google Scholar]
- Li, Z.; Liu, C.; Gao, J.; Li, X. An improved Wi-Fi/PDR integrated system using an adaptive and robust filter for indoor localization. ISPRS Int. J. Geo-Inf. 2016, 5, 224. [Google Scholar] [CrossRef] [Green Version]
- Cui, Y.; Zhang, Y.; Huang, Y.; Wang, Z.; Fu, H. Novel Wi-Fi/MEMS integrated indoor navigation system based on two-stage EKF. Micromachines 2019, 10, 198. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.M.; Sircoulomb, V.; Langlois, N. Robust State Estimation in Networked Control Systems under Linear Hard Equality Constraints. Int. J. Model. Identif. Control 2015, 3, 167–175. [Google Scholar] [CrossRef]
- Simon, D. Kalman Filtering with State Constraints: A Survey of Linear and Nonlinear Algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef] [Green Version]
- Zhou, M.; Dolgov, M.; Liu, Y.; Wang, Y. Wi-Fi/PDR integrated system for 3D indoor localization. In Proceedings of the International Conference on Machine Learning and Intelligent Communications, Hangzhou, China, 6–8 July 2018; pp. 451–459. [Google Scholar]
- Yuan, D.; Zhang, J.; Wang, J.; Cui, X.; Liu, F.; Zhang, Y. Robustly Adaptive EKF PDR/UWB Integrated Navigation Based on Additional Heading Constraint. Sensors 2021, 21, 4390. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, X.; Wang, Y.; Xu, C.Z. Biased constrained hybrid Kalman filter for range-based indoor localization. IEEE Sens. J. 2017, 18, 1647–1655. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, H.; Xie, Y.; Lu, H.; Zhang, J.; Diao, W.; Xu, R. An improved localization method in cyber-social environments with obstacles. Comput. Electr. Eng. 2020, 86, 106694. [Google Scholar] [CrossRef]
- Porrill, J. Optimal combination and constraints for geometrical sensor data. Int. J. Robot. Res. 1988, 7, 66–77. [Google Scholar] [CrossRef]
- Hoang, M.T.; Dong, X.; Lu, T.; Yuen, B.; Westendorp, R. WiFi RSSI Indoor Localization. IEEE Dataport, 30 November 2019. [Google Scholar] [CrossRef]
- Hoang, M.T.; Zhu, Y.; Yuen, B.; Rees, T.; Dong, X.; Lu, T.; Westendorp, R.; Xie, M. A soft range limited K-nearest neighbours algorithm for indoor localization enhancement. IEEE Sens. 2018, 18, 10208–10216. [Google Scholar] [CrossRef] [Green Version]
- Zou, H.; Jin, M.; Jiang, H.; Xie, L.; Spanos, C.J. WinIPS: WiFibased non-intrusive indoor positioning system with online radio map construction and adaptation. IEEE Trans. Wirel. Commun. 2017, 16, 8118–8130. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An improved K-Nearest-Neighbor indoor localization method based on Spearman distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Kushki, A.; Plataniotis, K.N.; Venetsanopoulos, A.N. Kernel based positioning in wireless local area networks. IEEE Trans. Mob. Comput. 2007, 6, 689–705. [Google Scholar] [CrossRef] [Green Version]
- Au, A.W.S.; Feng, C.; Valaee, S.; Reyes, S.; Sorour, S.; Markowitz, S.N.; Gold, D.; Gordon, K.; Eizenman, M. Indoor tracking and navigation using received signal strength and compressive sensing on a mobile device. IEEE Trans. Mob. Comput. 2013, 12, 2050–2062. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device 1 | Device 2 | Device 3 | |
|---|---|---|---|
| Journey 1 Length: 8′09″ | Nbr of RSSI detect.: 105 RMS unconstr.: 1.86 RMS constrained: 1.05 | Nbr of RSSI detect.: 155 RMS unconstr.: 1.31 RMS constrained: 1.28 | Nbr of RSSI detect.: 107 RMS unconstr.: 1.53 RMS constrained: 1.36 |
| Journey 2 Length: 6′34″ | Nbr of RSSI detect.: 127 RMS unconstr.: 1.87 RMS constrained: 1.43 | Nbr of RSSI detect.: 94 RMS unconstr.: 2.26 RMS constrained: 1.68 | Nbr of RSSI detect.: 114 RMS unconstr.: 1.59 RMS constrained: 1.58 |
| Journey 3 Length: 8′25″ | Nbr of RSSI detect.: 115 RMS unconstr.: 1.76 RMS constrained: 1.04 | Nbr of RSSI detect.: 151 RMS unconstr.: 0.93 RMS constrained: 0.89 | Nbr of RSSI detect.: 244 RMS unconstr.: 1.01 RMS constrained: 0.94 |
| Journey 4 Length: 10′38″ | Nbr of RSSI detect.: 90 RMS unconstr.: 1.43 RMS constrained: 1.01 | Nbr of RSSI detect.: 105 RMS unconstr.: 1.23 RMS constrained: 0.96 | Nbr of RSSI detect.: 142 RMS unconstr.: 1.56 RMS constrained: 1.38 |
| Journey 5 Length: 10′34″ | Nbr of RSSI detect.: 150 RMS unconstr.: 1.31 RMS constrained: 1.12 | Nbr of RSSI detect.: 123 RMS unconstr.: 0.77 RMS constrained: 0.66 | Nbr of RSSI detect.: 119 RMS unconstr.: 0.89 RMS constrained: 0.75 |
| Area 1 (Including AP3) | Area 2 (Including AP4) | Area 3 (Including AP5) | Area 4 (Including AP6) | |
|---|---|---|---|---|
| 6 m | 16.5 m | 6 m | 0 m | |
| 16.5 m | 21 m | 16.5 m | 6 m | |
| 2 m | −11 m | −14 m | −11 m | |
| 4 m | 2 m | −11 m | 2 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sircoulomb, V.; Chafouk, H. A Constrained Kalman Filter for Wi-Fi-Based Indoor Localization with Flexible Space Organization. Sensors 2022, 22, 428. https://doi.org/10.3390/s22020428
Sircoulomb V, Chafouk H. A Constrained Kalman Filter for Wi-Fi-Based Indoor Localization with Flexible Space Organization. Sensors. 2022; 22(2):428. https://doi.org/10.3390/s22020428
Chicago/Turabian StyleSircoulomb, Vincent, and Houcine Chafouk. 2022. "A Constrained Kalman Filter for Wi-Fi-Based Indoor Localization with Flexible Space Organization" Sensors 22, no. 2: 428. https://doi.org/10.3390/s22020428
APA StyleSircoulomb, V., & Chafouk, H. (2022). A Constrained Kalman Filter for Wi-Fi-Based Indoor Localization with Flexible Space Organization. Sensors, 22(2), 428. https://doi.org/10.3390/s22020428