
Ultrasonic Guided Waves for Liquid Water Localization in Fuel Cells: An Ex Situ Proof of Principle


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Water Management in Fuel Cells
1.2. Measurements Based on Guided Waves
1.3. Aim and Outline of This Article
2. Materials and Methods
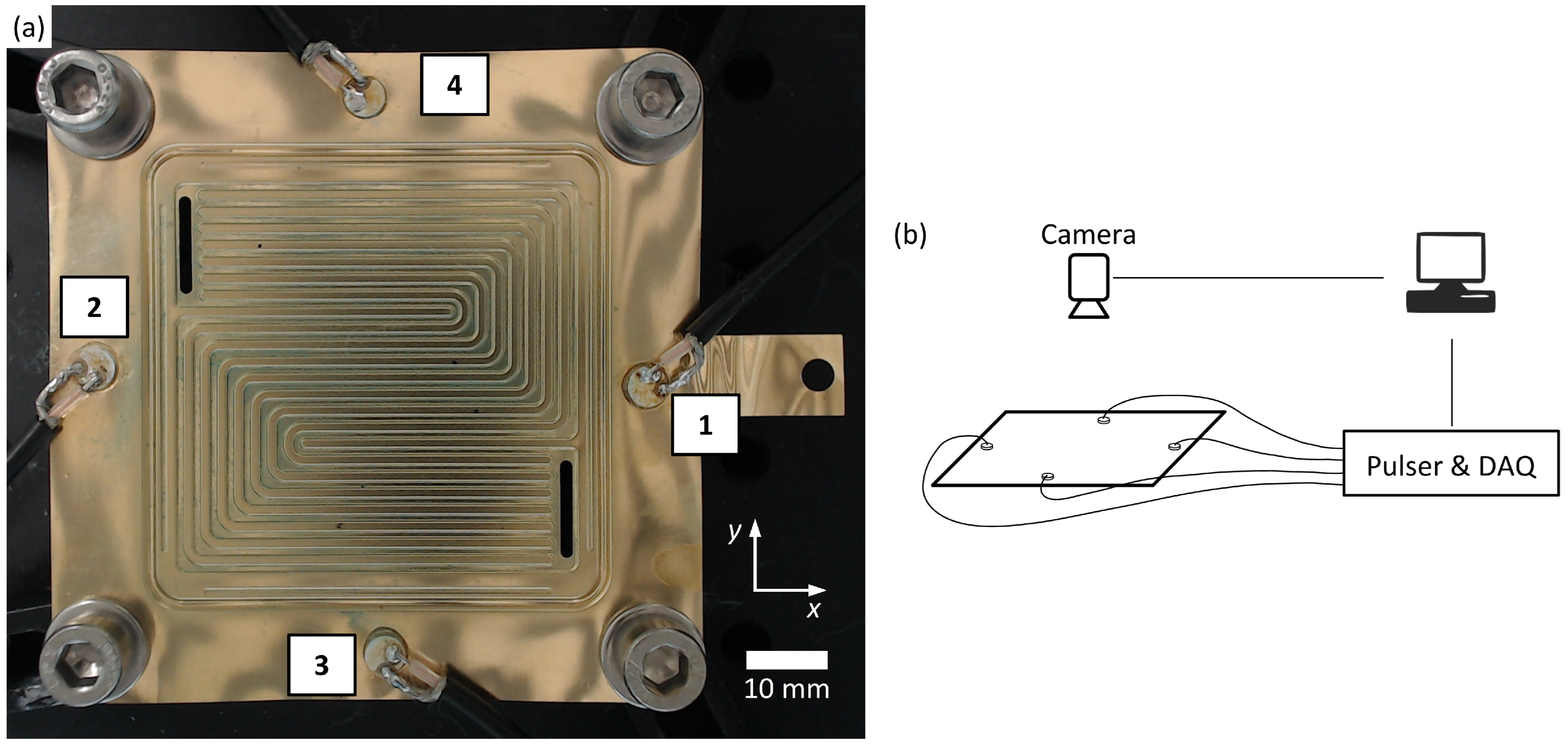
2.1. Experimental Setup
2.2. Ultrasound System
3. Signal Analysis and Evaluation
3.1. Propagation of Guided Waves in a PEMFC Bipolar Plate
3.2. Influence of Water Drops on the Guided Wave Response
4. Localization of Water Drops
4.1. Model Development and Training
- Baseline subtraction;
- Disregarding reversed signal paths because of the high similarity of the signals due to time-reversal invariance. Only one direction for each signal path was used. This leaves 10 out of the 16 signals for each measurement;
- Slicing the signals to ROIs with a length of 64.0 μs, as discussed in Section 3.2 and shown in Figure 5;
- Butterworth bandpass filter with lower and upper cutoff frequencies of 3 MHz and 7 MHz, respectively;
- Windowing of each signal in 250 windows, resulting in a length of 0.256 μs for each window;
- Calculating the signal energy of the difference signal for each window of each of the 10 relevant signal paths.
4.2. Characterization of Localization Properties
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AISI | American Iron and Steel Institute |
| DAQ | data acquisition system |
| EM | electromagnetic |
| EOCs | environmental and operational conditions |
| ML | machine learning |
| MSD | mean squared deviation |
| PC | personal computer |
| PEMFC | proton exchange membrane fuel cell |
| PWAS | piezoelectric wafer active sensors |
| ROI | region of interest |
| RSMD | root mean squared deviation |
| SHM | structural health monitoring |
References
- Wang, X.; Ma, Y.; Gao, J.; Li, T.; Jiang, G.; Sun, Z. Review on Water Management Methods for Proton Exchange Membrane Fuel Cells. Int. J. Hydrogen Energy 2021, 46, 12206–12229. [Google Scholar] [CrossRef]
- Wilberforce, T.; Alaswad, A.; Palumbo, A.; Dassisti, M.; Olabi, A.G. Advances in Stationary and Portable Fuel Cell Applications. Int. J. Hydrogen Energy 2016, 41, 16509–16522. [Google Scholar] [CrossRef] [Green Version]
- Kandlikar, S.G.; Lu, Z. Thermal Management Issues in a PEMFC Stack–A Brief Review of Current Status. Appl. Therm. Eng. 2009, 29, 1276–1280. [Google Scholar] [CrossRef]
- Yang, Z.; Du, Q.; Jia, Z.; Yang, C.; Jiao, K. Effects of Operating Conditions on Water and Heat Management by a Transient Multi-Dimensional PEMFC System Model. Energy 2019, 183, 462–476. [Google Scholar] [CrossRef]
- Schmittinger, W.; Vahidi, A. A Review of the Main Parameters Influencing Long-Term Performance and Durability of PEM Fuel Cells. J. Power Sources 2008, 180, 1–14. [Google Scholar] [CrossRef]
- Berg, P.; Promislow, K.; Pierre, J.S.; Stumper, J.; Wetton, B. Water Management in PEM Fuel Cells. J. Electrochem. Soc. 2004, 151, A341. [Google Scholar] [CrossRef]
- Ji, M.; Wei, Z. A Review of Water Management in Polymer Electrolyte Membrane Fuel Cells. Energies 2009, 2, 1057–1106. [Google Scholar] [CrossRef] [Green Version]
- Bazylak, A. Liquid Water Visualization in PEM Fuel Cells: A Review. Int. J. Hydrogen Energy 2009, 34, 3845–3857. [Google Scholar] [CrossRef]
- Rahimi-Esbo, M.; Ranjbar, A.; Rahgoshay, S. Analysis of Water Management in PEM Fuel Cell Stack at Dead-End Mode Using Direct Visualization. Renew. Energy 2020, 162, 212–221. [Google Scholar] [CrossRef]
- Kramer, D.; Zhang, J.; Shimoi, R.; Lehmann, E.; Wokaun, A.; Shinohara, K.; Scherer, G.G. In Situ Diagnostic of Two-Phase Flow Phenomena in Polymer Electrolyte Fuel Cells by Neutron Imaging: Part A. Experimental, Data Treatment, and Quantification. Electrochim. Acta 2005, 50, 2603–2614. [Google Scholar] [CrossRef]
- Turhan, A.; Heller, K.; Brenizer, J.; Mench, M. Quantification of Liquid Water Accumulation and Distribution in a Polymer Electrolyte Fuel Cell Using Neutron Imaging. J. Power Sources 2006, 160, 1195–1203. [Google Scholar] [CrossRef]
- Manke, I.; Hartnig, C.; Grünerbel, M.; Lehnert, W.; Kardjilov, N.; Haibel, A.; Hilger, A.; Banhart, J.; Riesemeier, H. Investigation of Water Evolution and Transport in Fuel Cells with High Resolution Synchrotron X-ray Radiography. Appl. Phys. Lett. 2007, 90, 174105. [Google Scholar] [CrossRef]
- Tsushima, S.; Teranishi, K.; Hirai, S. Magnetic Resonance Imaging of the Water Distribution within a Polymer Electrolyte Membrane in Fuel Cells. Electrochem. -Solid-State Lett. 2004, 7, A269. [Google Scholar] [CrossRef]
- Feindel, K.W.; LaRocque, L.P.A.; Starke, D.; Bergens, S.H.; Wasylishen, R.E. In Situ Observations of Water Production and Distribution in an Operating H2/O2 PEM Fuel Cell Assembly Using 1H NMR Microscopy. J. Am. Chem. Soc. 2004, 126, 11436–11437. [Google Scholar] [CrossRef]
- Chillara, V.K.; Lissenden, C.J. Review of Nonlinear Ultrasonic Guided Wave Nondestructive Evaluation: Theory, Numerics, and Experiments. Opt. Eng. 2015, 55, 011002. [Google Scholar] [CrossRef]
- Mitra, M.; Gopalakrishnan, S. Guided Wave Based Structural Health Monitoring: A Review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Jiao, P.; Egbe, K.J.I.; Xie, Y.; Matin Nazar, A.; Alavi, A.H. Piezoelectric Sensing Techniques in Structural Health Monitoring: A State-of-the-Art Review. Sensors 2020, 20, 3730. [Google Scholar] [CrossRef]
- Capineri, L.; Bulletti, A. Ultrasonic Guided-Waves Sensors and Integrated Structural Health Monitoring Systems for Impact Detection and Localization: A Review. Sensors 2021, 21, 2929. [Google Scholar] [CrossRef]
- Olisa, S.C.; Khan, M.A.; Starr, A. Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors 2021, 21, 811. [Google Scholar] [CrossRef]
- Mickens, T.; Schulz, M.; Sundaresan, M.; Ghoshal, A.; Naser, A.; Reichmeider, R. Structural Health Monitoring of an Aircraft Joint. Mech. Syst. Signal Process. 2003, 17, 285–303. [Google Scholar] [CrossRef]
- Leonard, K.R.; Malyarenko, E.V.; Hinders, M.K. Ultrasonic Lamb Wave Tomography. Inverse Probl. 2002, 18, 1795–1808. [Google Scholar] [CrossRef]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic Lamb Wave Tomography in Structural Health Monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Su, C.; Jiang, M.; Liang, J.; Tian, A.; Sun, L.; Zhang, L.; Zhang, F.; Sui, Q. Damage Localization of Composites Based on Difference Signal and Lamb Wave Tomography. Materials 2020, 13, 218. [Google Scholar] [CrossRef] [Green Version]
- Tietze, S.; Singer, F.; Lasota, S.; Ebert, S.; Landskron, J.; Schwuchow, K.; Drese, K.S.; Lindner, G. Monitoring of Soft Deposition Layers in Liquid-Filled Tubes with Guided Acoustic Waves Excited by Clamp-on Transducers. Sensors 2018, 18, 526. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Zhou, W.; Bao, Y.; Li, H. Ice Monitoring of a Full-Scale Wind Turbine Blade Using Ultrasonic Guided Waves under Varying Temperature Conditions. Struct. Control. Health Monit. 2018, 25, e2138. [Google Scholar] [CrossRef]
- Jiménez, A.A.; García Márquez, F.P.; Moraleda, V.B.; Gómez Muñoz, C.Q. Linear and Nonlinear Features and Machine Learning for Wind Turbine Blade Ice Detection and Diagnosis. Renew. Energy 2019, 132, 1034–1048. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Michaels, J.E.; Lee, S.J.; Michaels, T.E. Quantification of Surface Wetting in Plate-like Structures via Guided Waves. AIP Conf. Proc. 2012, 1430, 217–224. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Rose, J.L. Ultrasonic Guided Wave Tomography for Ice Detection. Ultrasonics 2016, 67, 212–219. [Google Scholar] [CrossRef]
- Ramdhas, A.; Pattanayak, R.K.; Balasubramaniam, K.; Rajagopal, P. Symmetric Low-Frequency Feature-Guided Ultrasonic Waves in Thin Plates with Transverse Bends. Ultrasonics 2015, 56, 232–242. [Google Scholar] [CrossRef]
- Yu, X.; Ratassepp, M.; Fan, Z. Damage Detection in Quasi-Isotropic Composite Bends Using Ultrasonic Feature Guided Waves. Compos. Sci. Technol. 2017, 141, 120–129. [Google Scholar] [CrossRef]
- Worden, K.; Manson, G. The Application of Machine Learning to Structural Health Monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 515–537. [Google Scholar] [CrossRef]
- Sbarufatti, C.; Manson, G.; Worden, K. A Numerically-Enhanced Machine Learning Approach to Damage Diagnosis Using a Lamb Wave Sensing Network. J. Sound Vib. 2014, 333, 4499–4525. [Google Scholar] [CrossRef]
- Agarwal, S.; Mitra, M. Lamb Wave Based Automatic Damage Detection Using Matching Pursuit and Machine Learning. Smart Mater. Struct. 2014, 23, 085012. [Google Scholar] [CrossRef]
- Hesser, D.F.; Kocur, G.K.; Markert, B. Active Source Localization in Wave Guides Based on Machine Learning. Ultrasonics 2020, 106, 106144. [Google Scholar] [CrossRef]
- Arcos Jiménez, A.; Gómez Muñoz, C.Q.; García Márquez, F.P. Dirt and Mud Detection and Diagnosis on a Wind Turbine Blade Employing Guided Waves and Supervised Learning Classifiers. Reliab. Eng. Syst. Saf. 2019, 184, 2–12. [Google Scholar] [CrossRef] [Green Version]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. 2000, 25, 120–126. [Google Scholar]
- Gust, N.; Schellhorn, F. High Frequency 16 Channel Ultrasonic Microscope for Annular Arrays. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1–3. [Google Scholar] [CrossRef]
- Huber, A. Numerical Modeling of Guided Waves in Anisotropic Composites with Application to Air-Coupled Ultrasonic Inspection. Ph.D. Thesis, Universität Augsburg, Augsburg, Germany, 2021. [Google Scholar]
- Fan, Z.; Castaings, M.; Lowe, M.J.S.; Biateau, C.; Fromme, P. Feature-Guided Waves for Monitoring Adhesive Shear Modulus in Bonded Stiffeners. NDT E Int. 2013, 54, 96–102. [Google Scholar] [CrossRef]
- Yu, X.; Fan, Z.; Castaings, M.; Biateau, C. Feature Guided Wave Inspection of Bond Line Defects between a Stiffener and a Composite Plate. NDT E Int. 2017, 89, 44–55. [Google Scholar] [CrossRef]
- Sargent, J.P. Corrosion Detection in Welds and Heat-Affected Zones Using Ultrasonic Lamb Waves. Insight Non-Destr. Test. Cond. Monit. 2006, 48, 160–167. [Google Scholar] [CrossRef] [Green Version]
- Fan, Z.; Lowe, M.J. Elastic Waves Guided by a Welded Joint in a Plate. Proc. R. Soc. Math. Phys. Eng. Sci. 2009, 465, 2053–2068. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Zuo, P.; Xiao, J.; Fan, Z. Detection of Damage in Welded Joints Using High Order Feature Guided Ultrasonic Waves. Mech. Syst. Signal Process. 2019, 126, 176–192. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L. Study on Guided Wave Propagation in a Water Loaded Plate with Wavenumber Analysis Techniques. AIP Conf. Proc. 2014, 1581, 365–372. [Google Scholar] [CrossRef]
- Hu, X.W.; Ng, C.T.; Kotousov, A. Ultrasonic Guided Wave Field Modeling in a One-Side Water-Immersed Steel Plate. In Lecture Notes in Civil Engineering, Proceedings of the EASEC16, Brisbane, Australia, 3–6 December 2019; Wang, C.M., Dao, V., Kitipornchai, S., Eds.; Springer: Singapore, 2021; pp. 1131–1140. [Google Scholar] [CrossRef]
- Liu, H.; Michaels, J.E.; Chen, X.; Michaels, T.E.; He, C. 3D Finite Element Modeling of Lamb Wave Scattering from a Sessile Water Droplet. AIP Conf. Proc. 2015, 1650, 1790–1796. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Deabate, S.; Gebel, G.; Huguet, P.; Morin, A.; Pourcelly, G. 3 In Situ and Operando Determination of the Water Content Distribution in Proton Conducting Membranes for Fuel Cells: A Critical Review. Energy Environ. Sci. 2012, 5, 8824–8847. [Google Scholar] [CrossRef]
- Ijaodola, O.S.; El- Hassan, Z.; Ogungbemi, E.; Khatib, F.N.; Wilberforce, T.; Thompson, J.; Olabi, A.G. Energy Efficiency Improvements by Investigating the Water Flooding Management on Proton Exchange Membrane Fuel Cell (PEMFC). Energy 2019, 179, 246–267. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sablowski, J.; Zhao, Z.; Kupsch, C. Ultrasonic Guided Waves for Liquid Water Localization in Fuel Cells: An Ex Situ Proof of Principle. Sensors 2022, 22, 8296. https://doi.org/10.3390/s22218296
Sablowski J, Zhao Z, Kupsch C. Ultrasonic Guided Waves for Liquid Water Localization in Fuel Cells: An Ex Situ Proof of Principle. Sensors. 2022; 22(21):8296. https://doi.org/10.3390/s22218296
Chicago/Turabian StyleSablowski, Jakob, Ziwen Zhao, and Christian Kupsch. 2022. "Ultrasonic Guided Waves for Liquid Water Localization in Fuel Cells: An Ex Situ Proof of Principle" Sensors 22, no. 21: 8296. https://doi.org/10.3390/s22218296
APA StyleSablowski, J., Zhao, Z., & Kupsch, C. (2022). Ultrasonic Guided Waves for Liquid Water Localization in Fuel Cells: An Ex Situ Proof of Principle. Sensors, 22(21), 8296. https://doi.org/10.3390/s22218296