
_Sun.png)


A Novel Approach for Cable Tension Monitoring Based on Mode Shape Identification


Abstract
:1. Introduction
2. Cable Model with Complex Boundary Conditions
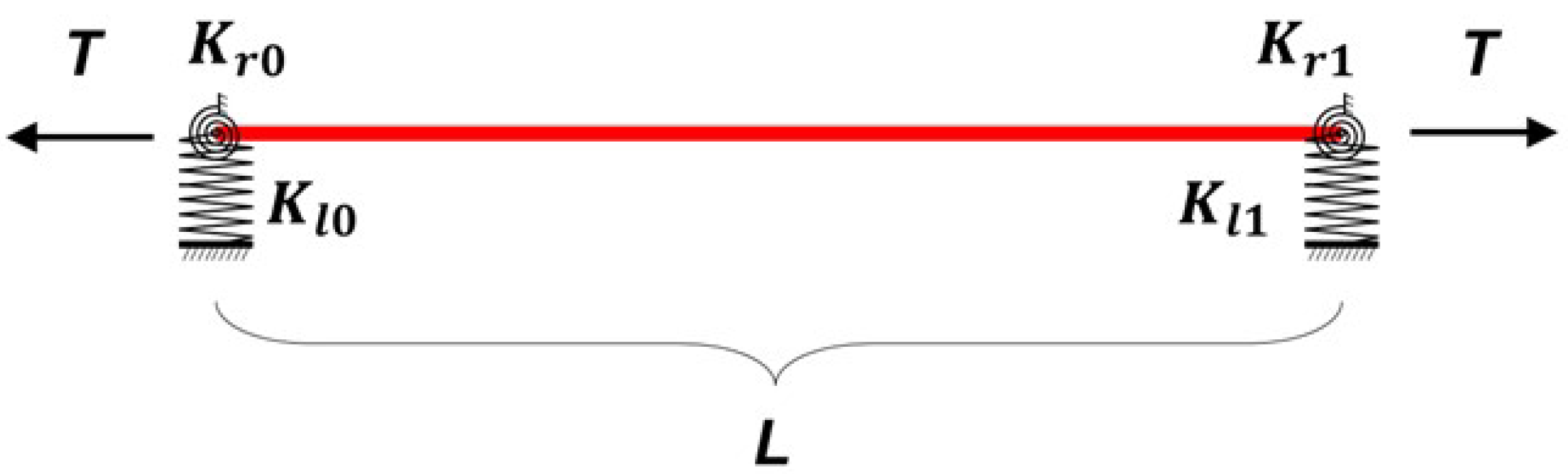
2.1. Simplifed Cable Model
2.2. Differential Equations of Cable
2.3. Solution of Cable Frequency by Dynamic Stiffness Method
2.3.1. Principle of Dynamic Stiffness Method
2.3.2. Solution of Cable Structure
- (1)
- Solution of
- (2)
- Solution of
- (3)
- Solution of
3. Influence of Boundary Conditions on Cable Mode Shape
3.1. Simplification of Boundary Conditions
3.2. Influence of Rotation Coefficients
3.3. Influence of Linear Coefficients
4. Long-Term Cable Tension Identification Method
4.1. Cable Tension Identification Based on Mode Shape Measurements
4.2. The New Long-Term Cable Tension Monitoring Method
5. Field Experiment
5.1. Experimental Design
- Step 1: Multiple sensors (Sensor 1–5) were arranged to synchronously measure the acceleration data of each position of the cable. The sampling frequency was 1000 Hz and the sampling time was 2 min for each group. Three groups of experiments were adopted in total.
- Step 2: Remove multiple sensors except one single sensor (Sensor 4) for measuring frequencies simulating the monitoring process. The sampling frequency was 1000 Hz, and the sampling time was 2 min for each group. Three groups of frequencies were measured.
- Step 3: The magnetic flux method was also used to identify the cable tension every 1 min, which is synchronized with the new method based on mode shape measurement. The cable tension was identified by magnetic flux and averaged and compared with the tension estimates calculated in Step 1 and Step 2 to verify the accuracy of the new method.
5.2. Experimental Results Analysis
6. Conclusions
- A refined cable model by considering the different boundary conditions is established, and then the dynamic stiffness method is used to calculate the components variation of sine and hyperbolic sine (including hyperbolic cosine) of cable mode shape under different boundary conditions. The theoretical analysis illustrated that the influence of the hyperbolic sine component is large near the boundary, which cannot to be ignored. However, the influence range of the hyperbolic sinusoidal mode is limited. For the different boundary conditions, the hyperbolic mode has a small component of the 10% mode of the cable length away from the boundary. Furthermore, the hyperbolic sine mode basically vanishes within 15% of cable length. Since the variation of hyperbolic mode is relatively complex, it is suggested to keep the distance at about 10–15% of cable length from the boundaries when arranging sensors for cable tension estimation to avoid the influence of hyperbolic mode components.
- The field experiments are conducted for the purpose of verification. The new monitoring approach includes two parts. Using the data collected by the sensors installed at multiple points of the cable, the equivalent length of the cable can be obtained via the method based on mode shape measurement, and thus, the accurate identification of the short cable tension is realized. Then, based on the equivalent cable length, a single sensor can realize the long-term monitoring of cable tension accurately. The experimental results show that the proposed method performs a great effect on cable tension estimation and long-term monitoring. This method can control the error of cable tension identification within 3%, which is more accurate than the commonly used beam theory method, making it more advantageous in practical engineering.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, D.; Ye, J.; Wang, B.; Wahab, M.A. Review on the service safety assessment of main cable of long span multi-tower suspension bridge. Appl. Sci. 2021, 11, 5920. [Google Scholar] [CrossRef]
- Zhang, H.; Mao, J.; Wang, H.; Zhu, X.; Zhang, Y.; Gao, H.; Ni, Y.; Hai, Z. A novel acceleration-based approach for monitoring the long-term displacement of bridge cables. Int. J. Struct. Stab. Dyn. 2022; accepted. [Google Scholar] [CrossRef]
- Dong, J.; Yan, X.; Li, S. Cable force monitoring and prediction for cable group of long-span cable-supported bridges. J. Civ. Struct. Health Monit. 2018, 8, 597–605. [Google Scholar] [CrossRef]
- Zhang, L.; Qiu, G.; Chen, Z. Structural health monitoring methods of cables in cable-stayed bridge: A review. Measurement 2021, 168, 108343. [Google Scholar] [CrossRef]
- Sun, J.B.; Zhao, Z.Z.; Zhao, H.H. Measuring methods of cable tension in cable-stayed bridges. Adv. Mater. Res. 2011, 295, 1230–1235. [Google Scholar] [CrossRef]
- Li, H.; Ou, J. The state of the art in structural health monitoring of cable-stayed bridges. J. Civ. Struct. Health Monit. 2016, 6, 43–67. [Google Scholar] [CrossRef]
- Yao, Y.; Yan, M.; Bao, Y. Measurement of cable forces for automated monitoring of engineering structures using fiber optic sensors: A review. Autom. Constr. 2021, 126, 103687. [Google Scholar] [CrossRef]
- Hu, D.; Guo, Y.; Chen, X.; Zhang, C. Cable force health monitoring of Tongwamen bridge based on fiber Bragg grating. Appl. Sci. 2017, 7, 384. [Google Scholar] [CrossRef] [Green Version]
- Caetano, E. On the identification of cable force from vibration measurements. In Proceedings of the IABSE-IASS Symposium, London, UK, 22–23 September 2011. [Google Scholar]
- Irvine, H.M. Cable Structures, 1st ed.; The MIT Press: Cambridge, MA, USA, 1981; pp. 87–106. [Google Scholar]
- Kim, B.H.; Park, T. Estimation of cable tension force using the frequency-based system identification method. J. Sound Vib. 2007, 304, 660–676. [Google Scholar] [CrossRef]
- Di, F.; Sun, L.; Chen, L. Cable vibration control with internal and external dampers: Theoretical analysis and field test validation. Smart Struct. Syst. 2020, 26, 575–589. [Google Scholar]
- Zui, H.; Shinke, T.; Namita, Y. Practical formulas for estimation of cable tension by vibration method. J. Struct. Eng. 1996, 122, 651–656. [Google Scholar] [CrossRef]
- Ren, W.X.; Chen, G.; Hu, W.H. Empirical formulas to estimate cable tension by cable fundamental frequency. Struct. Eng. Mech. 2005, 20, 363–380. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J. Practical formula for cable tension estimation by vibration method. J. Bridge Eng. 2012, 17, 161–164. [Google Scholar] [CrossRef]
- Huang, Y.H.; Fu, J.Y.; Wang, R.H.; Gan, Q. Unified practical formulas for vibration-based method of cable tension estimation. Adv. Struct. Eng. 2015, 18, 405–422. [Google Scholar] [CrossRef]
- Mehrabi, A.B.; Farhangdoust, S. A laser-based noncontact vibration technique for health monitoring of structural cables: Background, success, and new developments. Adv. Acoust. Vib. 2018, 2018, 8640674. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Zhang, C.; Jiang, S.; Zhang, J. Noncontact cable force estimation with unmanned aerial vehicle and computer vision. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 73–88. [Google Scholar] [CrossRef]
- Yan, B.; Li, D.; Chen, W.; Deng, L.; Jiang, X. Mode shape–aided cable force determination using digital image correlation. Struct. Health Monit. 2020, 1475921720952163. [Google Scholar] [CrossRef]
- Feng, D.; Scarangello, T.; Feng, M.Q.; Ye, Q. Cable tension force estimate using novel noncontact vision-based sensor. Measurement 2017, 99, 44–52. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.; Kong, D. A non-contact vision-based system for multipoint displacement monitoring in a cable-stayed footbridge. Struct. Control. Health Monit. 2018, 25, e2155. [Google Scholar] [CrossRef] [Green Version]
- Yan, B.; Yu, J.; Soliman, M. Estimation of cable tension force independent of complex boundary conditions. J. Eng. Mech. 2015, 141, 06014015. [Google Scholar] [CrossRef]
- Yan, B.; Chen, W.; Yu, J.; Jiang, X. Mode shape-aided tension force estimation of cable with arbitrary boundary conditions. J. Sound Vib. 2019, 440, 315–331. [Google Scholar] [CrossRef]
- Syamsi, M.I.; Wang, C.Y.; Nguyen, V.S. Tension force identification for cable of various end-restraints using equivalent effective vibration lengths of mode pairs. Measurement 2022, 197, 111319. [Google Scholar] [CrossRef]
- Wu, W.H.; Chen, C.C.; Chen, Y.C.; Lai, G.; Huang, C.M. Tension determination for suspenders of arch bridge based on multiple vibration measurements concentrated at one end. Measurement 2018, 123, 254–269. [Google Scholar] [CrossRef]
- Chen, C.C.; Wu, W.H.; Chen, S.Y.; Lai, G.; Huang, C.M. A novel tension estimation approach for elastic cables by elimination of complex boundary condition effects employing mode shape functions. Eng. Struct. 2018, 166, 152–166. [Google Scholar] [CrossRef]
- Han, F.; Dan, D.; Cheng, W. Extension of dynamic stiffness method to complicated damped structures. Comput. Struct. 2018, 208, 143–150. [Google Scholar] [CrossRef]
- Wittrick, W.H.; Williams, F.W. A general algorithm for computing natural frequencies of elastic structures. Q. J. Mech. Appl. Math. 1971, 24, 263–284. [Google Scholar] [CrossRef]
- Han, F.; Dan, D.; Cheng, W.; Jubao, Z. An improved Wittrick-Williams algorithm for beam-type structures. Compos. Struct. 2018, 204, 560–566. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length L (m) | Tension | Mass | EI |
|---|---|---|---|
| 10.00 | 1500 | 80.00 | 3000 |
| Length | Mass | Designed Cable Tension |
|---|---|---|
| 8.1186 | 57.57 | 1408.0 |
| Group/Order | Frequency () | Equivalent Length | Cable Tension |
|---|---|---|---|
| Data Group 1 | 1387 | ||
| 1 | 8.8779 | 8.5465 | |
| 2 | 18.0239 | 7.5845 | |
| Data Group 2 | 1482 | ||
| 1 | 8.8944 | 8.9701 | |
| 2 | 20.1651 | 7.7198 | |
| Data Group 3 | 1477 | ||
| 1 | 9.0258 | 8.8290 | |
| 2 | 20.1070 | 7.7011 | |
| Average | 1449 | ||
| 1 | 8.7819 | ||
| 2 | 7.6685 |
| Group/Order | Frequency () | Equivalent Length | Cable Tension | Beam Theory |
|---|---|---|---|---|
| Data Group 4 | 1442 | 1115 | ||
| 1 | 8.9713 | 8.7819 | ||
| 2 | 20.1674 | 7.6685 | ||
| Data Group 5 | 1431 | 1104 | ||
| 1 | 8.9423 | 8.7819 | ||
| 2 | 20.1643 | 7.6685 | ||
| Data Group 6 | 1412 | 1086 | ||
| 1 | 8.9004 | 8.7819 | ||
| 2 | 20.2333 | 7.6685 | ||
| Average | 1428 | 1105 |
| Method | Cable Tension | Error |
|---|---|---|
| Designed cable tension | 1408 | – |
| Mode Shape Identification Method (Multiple Sensors) | 1449 | 2.91 |
| Mode Shape Identification Method (Single sensor) | 1428 | 1.42 |
| Magnetic flux method | 1457 | 3.48 |
| Beam theory method | 1105 | 21.52 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Zhang, J.; Zhang, Y.; Li, C. A Novel Approach for Cable Tension Monitoring Based on Mode Shape Identification. Sensors 2022, 22, 9975. https://doi.org/10.3390/s22249975
Xu Y, Zhang J, Zhang Y, Li C. A Novel Approach for Cable Tension Monitoring Based on Mode Shape Identification. Sensors. 2022; 22(24):9975. https://doi.org/10.3390/s22249975
Chicago/Turabian StyleXu, Yichao, Jian Zhang, Yufeng Zhang, and Changzhao Li. 2022. "A Novel Approach for Cable Tension Monitoring Based on Mode Shape Identification" Sensors 22, no. 24: 9975. https://doi.org/10.3390/s22249975
APA StyleXu, Y., Zhang, J., Zhang, Y., & Li, C. (2022). A Novel Approach for Cable Tension Monitoring Based on Mode Shape Identification. Sensors, 22(24), 9975. https://doi.org/10.3390/s22249975